
三维激光扫描在建筑规划竣工测绘中的应用
2023-04-29 04:59:12陈小丽
信息系统工程 2023年3期
陈小丽
摘要:三维激光扫描是新型测量技术,能够应用到法律证据、工厂改造、古建筑保护等领域,应用效果显著。但是在建筑规划竣工测绘中,三维激光扫描技术的应用少。主要讨论三维激光扫描法在建筑规划竣工测绘中应用的相关问题,分析三维激光扫描法的应用效果,包括技术指标、关键技术等。分析三维激光扫描技术的应用效果,以供参考。
关键词:三维激光扫描;建筑规划;竣工测绘
一、前言
现代科技的快速发展,加快了三维激光扫描的发展速度,使其能够有效应用于建筑规划竣工测绘中,改善单点测量的不足与缺陷。在一定的时间要求下,三维激光扫描发射数十万个点,通过点云方式,充分表达出三维空间形态[1]。利用高分辨成像技术,实现三维正射影像,表达出物体立体状态,弥补传统测绘的不足,能够提升工作效率,加强应用质量。本文主要讨论三维激光扫描法在建筑规划竣工测绘中应用的相关问题,分析三维激光扫描法的应用效果,包括技术指标、关键技术等。
二、基本概述
(一)建筑规划竣工测绘
在规划竣工测绘中,涉及的测绘内容非常多,比如测量建筑的高度、绘制地形图(1:500)、测量室内地坪。分析传统的规划测绘技术,多依赖水准仪、全站仪设备,测量二维平面,部分区域还要测量建筑高度、面积等[2]。现代经济高速发展,增加了城市规划与管理的内容,二维竣工图很难呈现建筑全貌、地物关系等,越来越无法满足撑死规划、管理的要求。
(二)三维激光扫描
三维激光扫描,是一种全自动扫描技术,具备较高的准确性,收集物体的三维坐标、影像数据,属于测绘领域的技术创新表现。相比GPS、全站仪技术,三维激光扫描能够快速获取数据信息,设置多个采样点,避免测量点数据分析的片面性。相比近景摄影测量技术,尽管三维激光扫描技术无法构建连续三维模型,然而整体工作效率高,可以简化数据处理工作,建立测绘的三维数据模型,应用前景广阔[3]。
三维激光扫描具备原有测量技术的优势,通过激光扫描设备,确保点云数据采集的高效性,不再出现大量的外业作业,开始转变为内业作业,有助于缩短外业工作时间,减轻测量人员的工作压力,整体工作效率大大提高。
(三)技术原理
在测绘行业中,三维激光扫描技术成为突破性技术,应用优势显著高于卫星定位技术,具备较高的技术效率、精度。如果无法获取地物的特征点,则要使用三维激光扫描技术,保证三维坐标的准确度。激光扫描仪涉及激光测距系统、数据传输系统、显示系统、电源供应系统,配置测距装置,能够获取准确的点位距离。通过测角装置,可以获取水平角、垂直角度,计算点位三维坐标。利用激光扫描法,可以获得点位信息,并形成点云[4]。在存储点云时,主要存储激光反射强度、色彩信息。
三、三维激光扫描在建筑规划竣工测绘中的应用
(一)技术与图件成果要求
建筑竣工测量,重点对建筑、附属物平面位置进行测量,准确规划界限距离、高程等。采集内容包括建筑平面、高程、位置、立面、分界线[5]。在图件成果中,涉及建筑立面示意图、竣工测量平面图、三维模型。
(二)技术流程
绘制建筑竣工图纸,建立三维模型,则要使用现有的技术方法,形成多个实施途径。
第一,传统外业测绘,需要采集地物点数据,联合3Dmax软件,建立三维地理信息。通过RTK、全站仪,测量全野外地物,同时测量建筑的外立面尺寸、高度等。现场拍照建筑物,利用全站仪数据,绘制竣工平面图,通过3Dmax软件,建立测量数据、影像数据模型,绘制建筑立面图。全站仪设备,很难提升测绘效率,且3Dmax的软件操作复杂,整体效率低。
第二,无人机倾斜摄影,联合DP-Modeler建立模型。使用此种方法时,以无人机开展倾斜摄影测量,生成倾斜数据。矢量采集倾斜数据,绘制竣工平面图、立面图。利用DP-Modeler软件,加工处理倾斜摄影数据,建立三维模型。使用上述方法,可以减少操作时间,但是倾斜影像纹理质量低。在建模操作时,需要在影像图内提取纹理。纹理畸变问题,会严重影响建筑的立面图精度、三维模型质量。无人机航飞,要获取相关部门批准,手续办理时间长,要延长项目周期。
第三,采用激光三维扫描仪,采集点云数据,使用SketchUp建立模型。使用扫描技术时,需要搭配激光扫描仪,全方位采集点云数据。利用点云数据,保证矢量数据分析的科学性,绘制竣工平面图。利用激光点云数据,导入到SketchUp软件,建立三维模型,导出建筑立面图。采用此种方法,提升数据采集效率,且建模软件的操作难度小,能够获得较高的模型精度,生成完整的建筑立面图。
上述所提及的方法措施,均在实际工作中得以检验,结果显示,第三种方法的时间花费少、精度高度,且软件、硬件的掌握难度低,可以作为推荐方法。
(三)外业工作流程
在外业工作中,要使用移动三维激光扫描仪,测量里程为100m,30万个点/s,精度达到1—3cm。利用SLAM算法,确保数据的自动配对。通过SLAM技术,无须采用GNSS信号,工作环境的适应度高,不需要架设站点,能够在无GNSS信号区域内扫描数据。在控制平台上,实时显示采集点云的范围,形成一体化点云。然而在实际工作中,遵循SLAM算法原理,测试区的地物信息较多时,并且存在明显差异时,此种方法的定位精度高。当地物特征比较少,且重复问题较多时,则会使定位精度下降。
在具体工作中,测区采用“最少路线覆盖”原则,确保路线规划的科学性。利用全站仪、RTK,合理布置控制点,扫描区域内的地表、外墙。在建筑物内部,则要沿着楼梯,对建筑局部、建筑顶部进行扫描。在扫描操作中,利用SLAM算法,保证点云数据的配准。利用单反相机、全景相机,拍摄建筑外部图片,获取纹理照片。
(四)三维激光扫描方案
不同地区具备明显的特征差异,因此选择扫描方案时,必须按照实际情况分析,联合已控制的点分布特征。
1.坐标系扫描。扫描仪、靶标扫描时,均要放置在控制点位置,简化扫描流程,保证扫描效率。通过业内数据,明确点云位置、方向。
2.碎部控制扫描法。此种方法的扫描仪,不能架设在已知控制点。外业采用常规测量法,获取云中数据、信息,掌握三维坐标数据。内业使用各站同名碎部控制法,确保数据配额与定向。
3.靶标配准法:扫描操作时。无须控制在已知控制点,利用邻近站点的靶标,明确邻近站点的关系。在操作期间,选取少量碎部控制点。内业利用同名靶标球,可以实现邻近站点的配准,从而明确点云的方向。
(五)配置与组装扫描仪器
三维激光扫描扫描仪、设备,涉及发电机、靶标球、发电机、笔记本电脑。在使用设备和仪器时,为了架设、转站外业仪器,项目人员实现自动化设计、生产,顺利组装推车,开展外业测量作业。
(六)数据处理
通过CloudCompare软件,获取设备的点云数据。点云数据处理之后,配准现有的控制点,促进坐标的相互转换,获取高程数据、坐标数据点云。配准操作中,必须使用完整的点云数据,严禁使用抽稀点云,保证配准的准确度。配准完成后,要开展点云去噪、点云抽稀操作,将测区外的飞点去除。点位抽稀结束后,选择适宜的点数据。此次点位抽稀间隙为5cm。
点云数据处理之后,要使用EPS软件,比如点云模块、绘图模块。按照规范要求,绘制完整的竣工平面图,包括建筑主体、地下室轮廓线、内部分界线。在平面图内,还要标注附属设施、配套设施、附属用房的位置;明确周边位置信息、建设场地信息等。
点云处理之后,通过特定插件,导入SketchUp软件,建立三维模型。遵循点云,建立目标的特征点、线、面、三角网。利用三角网剖分,建立点云拓扑关系。遵照纠正后的影像招聘,将纹理映射添加到几何模型中。纹理贴图,则要使用实景照片制作法。纹理贴图的格式,通常为PNG、JPG格式。在生产过程中,针对建筑物里面,则要遵循点云尺寸,包括装饰物、女儿墙、屋檐、阳台等。模型不能出现交叉点、废点、漏缝问题,要确保结构、层数、里面、高度的相符度。在建立建筑模型时,要围绕地形地貌、停车位、道路设施、绿化植被,建立对应的模型,准确反映出建设场地、周边信息。
(七)精度分析
采集完点云数据后,合理应用全站仪设备,对点云数据、空间坐标进行校核。点云数据误差为1cm,精度满足竣工精度要求。
四、三维激光扫描在建筑规划竣工测绘中的应用实例
(一)项目概况
此次试验项目占地4万平方米,包括住宅、幼儿园、配套商业建筑。项目周边道路完善,未形成内部环境,导致被遮挡物比较少,因此要采用三维激光扫描开展竣工测绘。
(二)数据采集
项目通过自由设站点方式,全面采集点云数据。不同站点的重合度达标,通过采集公共地点物,可以拼接点云。不同箭镞构成扫描闭合环,从而生成大的闭合网,建设60个站点,不同站点的时间为3min,总耗时90min。在项目四周设置控制点,粘贴打印标靶,扫描控制点,纠正点云数据的空间坐标。
(三)点云数据处理
外业采集的原始点云数据,传入Cyclone软件中,从而处理点云数据。软件按照视觉追踪技术,自动拼接多数站点。由于邻近站点的缺乏公共点,因此采用人工拼接方式。下表为项目站点的拼接误差,最大误差达到0.015mm,最小误差为0.005mm,拼接精度要求高。完成拼接操作后,导入外业控制点坐标,将点云模型校正到测量坐标系内,可以形成测量的点云数据。针对点云数据内的异常点、孤立点,要实行去噪处理,输出反色率、坐标、色彩信息的格式点云数据,为EPS三维测图提供使用。
(四)绘制竣工地形图
点云数据经过数据转换后,传入到EPS三维测图软件中,测绘竣工地形图。数据采集,包括建筑分层轮廓线、高程、地物特征点、高程标记点,同时注重与周边环境的交接处理。软件在二维窗口、三维创口相互切换,实现实时联动,同步采集、编辑数据。与传统切片处理模式相比,整体效率的改善效果佳。完成图形编辑后,注重项目规划控制红线的叠加,添加工程图廓,输出DWG格式竣工地形图,为项目提供使用。
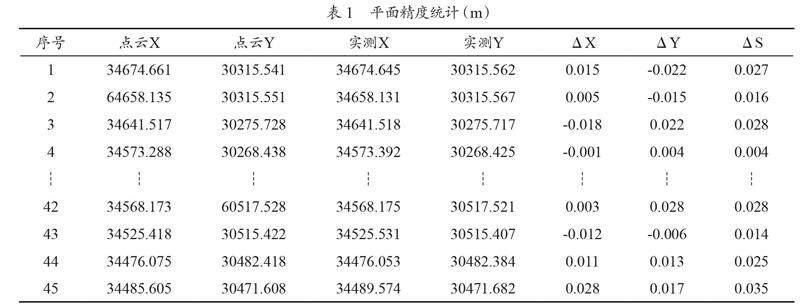
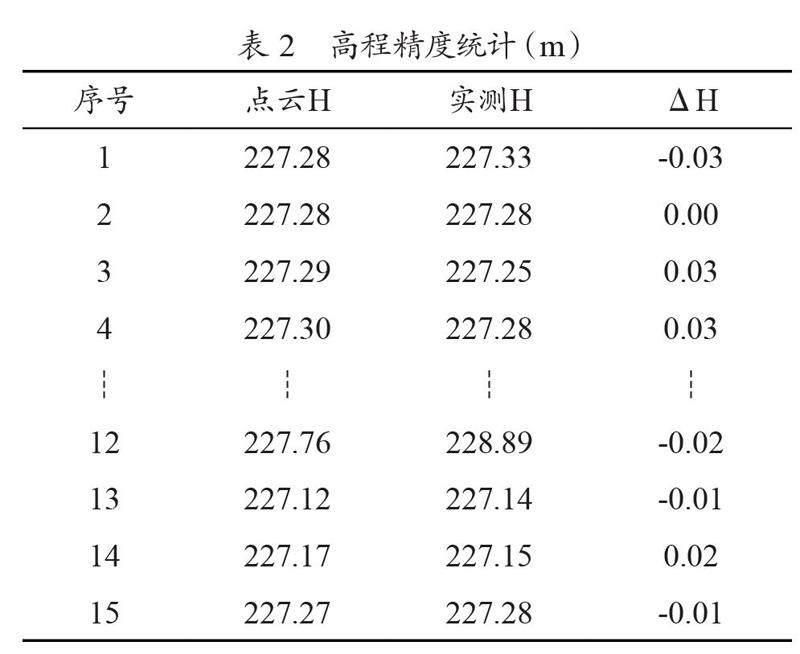
(五)检查成果精度
在对点云测图精度进行检验时,通过TS02全站,实测建筑外角点坐标、建筑高程,比较检查点、二维地形图,从而获得成果的精度统计信息,对三维点云测图精度进行验证。项目实地测量平面检查点45个,高程检查点15个,见表1和表2。通过数据可知,平面检查点达到0.061m的偏差,中误差为0.028m。高程检查点达到0.03m的误差,中误差为0.024。平面、高程满足地形图(1 : 500)精度要求。
五、结语
综上所述,在现代技术支持下,研发出三维激光扫描技术,操作性、稳定性较高,所以成为主流测绘技术。该项技术的优势,在于快速获取三维信息。三维建模,可以整合点云数据、实景照片,全面呈现出建筑体,同时可以复制建筑的特征。对于竣工测绘数据,则要借助测量模型获取数据,缩短外业测绘时间,增加信息承载量;同时,促进传统测绘的内业模式变革,减少建模时间,缩短图纸绘制时间,保障内业制图的精度,成为先进的测绘方法。本文以具体测绘案例,探究三维激光扫描法的应用效果,证明该项技术具备较高的应用价值。
参考文献
[1]胡玉祥,张洪德,熊文辉,等.基于三维激光点云的地铁竣工规划验收测绘及工程应用[J].测绘通报,2020,(S1):53-58+64.
[2]李杰林,白德威,杨承业,等.基于三维激光扫描点云数据的地下巷道岩体结构面识别及稳定性分析[J].黄金科学技术,2022,30(03):343-351.
[3]徐士月,周涛,卞桂荣,等.基于三维激光扫描的太湖隧道施工围堰监测信息系统研究与实现[J].工程勘察,2022,50(12):47-50.
[4]王晋昶,聂宇,苏中帅,等.三维激光扫描技术与无人机摄影测量技术在土方算量中的对比与应用[J].建筑技术,2022,53(07):874-877.
[5]刘欢佳,袁俭,钟易达.三维激光扫描曲面结构点云安装复核技术在异形混凝土结构施工中的应用[J].城市建筑空间,2022,29(10):242-243.
作者单位:重庆市勘测院
猜你喜欢
智能计算机与应用(2017年3期)2017-07-15 14:01:19
农家科技中旬版(2017年5期)2017-07-14 08:38:27
中国科技纵横(2017年3期)2017-03-29 16:01:41
科技视界(2016年1期)2016-03-30 09:08:18
居业(2015年15期)2016-02-25 19:35:14
科技视界(2016年4期)2016-02-22 12:45:32
科技与创新(2015年20期)2015-10-29 23:54:33
绿色科技(2015年6期)2015-08-05 18:25:42
价值工程(2015年12期)2015-05-05 05:54:45
科技与创新(2015年4期)2015-03-31 23:11:46
