
自动地形跟随控制律设计
2023-04-26 03:18陈孔锦余云鹏杨振声
教练机 2023年1期
陈孔锦,余云鹏,杨振声,徐 燕
(航空工业洪都,江西 南昌,330024)
0 引言
地形跟随最早的雏形是低空飞行。早在20 世纪40 年代,低空飞行就已应用于军事作战,飞机利用地球曲率对雷达探测的避让、地形对雷达探测的遮挡及地杂波对雷达探测的干扰加强隐身效果完成对敌防区的突然打击[1]。由于技术限制,早期低空飞行主要依靠飞行员驾驶完成。然而超低空大速度飞行时,飞行员高度紧张,负担很重,要在陌生地域、复杂气象、夜间等环境下依靠飞行员驾驶完成超低空长距离飞行,几乎不可能。随着地形探测雷达和地形跟随控制方法的发展,基于自动地形跟随的超低空突防才逐渐成为可能。
基于地形探测雷达的地形跟随技术需发射电磁波探测前方地形,隐身效果差。随着数字地形技术和导航技术的成熟,出现了隐身效果更佳、突防效果更好的基于数字地形库的自动地形跟随技术。飞行员在低空突防系统中设置好起始点和目标点后,系统自动规划参考航迹,飞机在地形跟随控制算法控制下自动沿参考航迹飞往目标点[2]。
自动地形跟随以超低空形式进行时,参考航迹紧贴地形起伏,飞机要严格沿参考航迹飞行,否则会出现撞地、撞山危险。为此,本文设计两种适合超低空突防的自动地形跟随控制方案。
1 控制方案
要实现飞机严格沿起伏变化剧烈的地形跟随参考航迹飞行,就要保证飞机在参考航迹上飞行航迹倾角跟随参考航迹倾角变化,为此设计了两种基于飞行高度偏差和航迹倾角偏差的自动地形跟随控制方案。
方案一的地形跟随控制律框图如图1 所示。地形跟随控制回路根据飞行高度差、升降速度差和升降加速度差进行控制,地形跟随控制回路以飞机实时位置、飞行高度、升降速度和升降加速度作为输入,经地形跟随控制回路解算输出法向过载指令,法向过载指令输入到纵向控制增稳回路,由纵向控制增稳回路解算输出平尾偏转指令,控制飞机运动。由飞机位置插值参考航迹高度时,不能直接用飞机实时位置,应叠加一定的位置提前量,相当于飞行员进行手动地形跟随时,不是根据飞机实时高度和飞机正下方的地形高度来控制飞机,而是综合考虑飞机实时高度、速度、响应速度和飞机前方一定距离的地形高度及地形陡峭程度来控制飞机,因此位置提前量应随飞机速度和地形陡峭程度调参。如果飞机速度快、地形陡峭,位置提前量应大些;如果飞机速度慢、地形平缓,位置提前量应小些。航迹倾角的正切值与升降速度存在近似线性关系。引入飞行高度差信号的作用是根据高度偏差将飞机拉到参考航迹上;引入升降速度差信号的作用是间接控制飞行航迹倾角,让飞行航迹倾角跟上参考航迹倾角;引入升降加速度差信号的作用是间接控制飞行航迹倾角变化率,让飞行航迹倾角变化率跟上参考航迹倾角变化率,这样才能保证飞行航迹倾角跟上参考航迹倾角,上述三路信号相辅相成,才能保证飞机严格沿地形跟随参考航迹飞行。
方案二的控制律框图如图2 所示。地形跟随控制回路根据飞行高度差、航迹一阶导差和航迹二阶导差进行控制,地形跟随控制回路以飞机实时位置、飞行高度、飞行航迹一阶导和飞行航迹二阶导作为输入,经地形跟随控制回路解算输出法向过载指令,法向过载指令输入到纵向控制增稳回路,由纵向控制增稳回路解算输出平尾偏转指令,控制飞机运动。由飞机位置插值参考航迹高度时,飞机位置同样要叠加一定的位置提前量,位置提前量同样应随飞机速度和地形陡峭程度调参。 航迹倾角的正切值为航迹一阶导。 引入飞行高度差信号的作用是根据高度偏差将飞机拉到参考航迹上;引入航迹一阶导差信号的作用是控制飞行航迹倾角,让飞行航迹倾角跟上参考航迹倾角;引入航迹二阶导差信号的作用是控制飞行航迹倾角变化率,让飞行航迹倾角变化率跟上参考航迹倾角变化率,这样才能保证飞行航迹倾角跟上参考航迹倾角,上述三路信号相辅相成,就能保证飞机严格沿地形跟随参考航迹飞行。
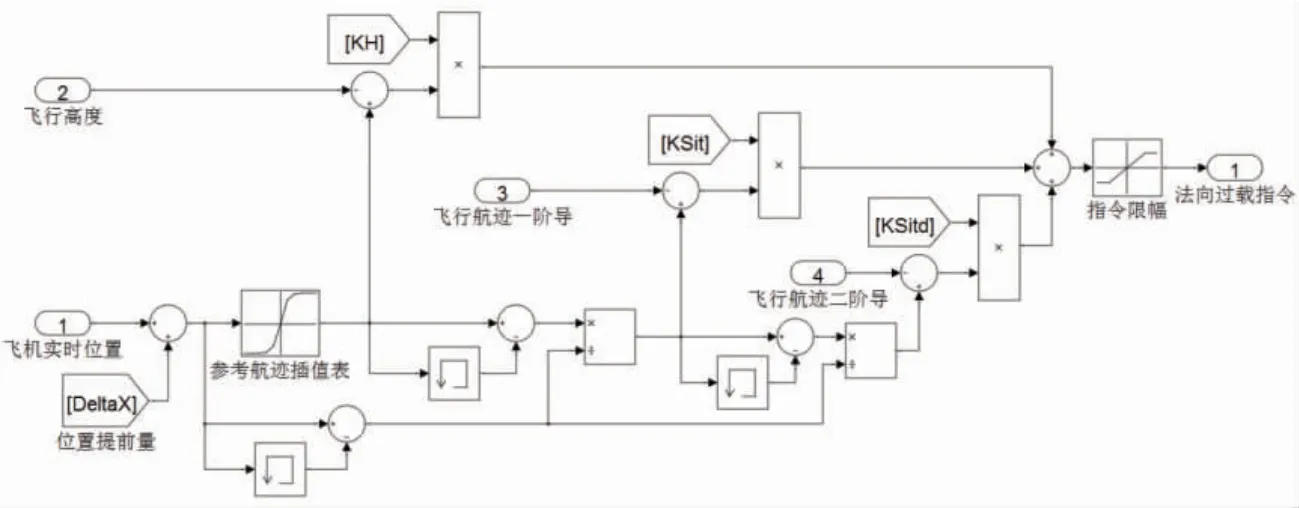
图2 地形跟随控制律框图(方案二)
2 仿真结果
假设飞机以速度800km/h、正飞形式进行地形跟随,航迹倾角限制为-15°至30°,法向过载限制为0g至3g,最小离地安全高度为50m,对于给定的地形,经综合航迹平滑算法规划出参考航迹,分别采用方案一和方案二让飞机沿参考航迹飞行,方案一仿真结果如图3 至图4 所示,方案二仿真结果如图5 至图6 所示。
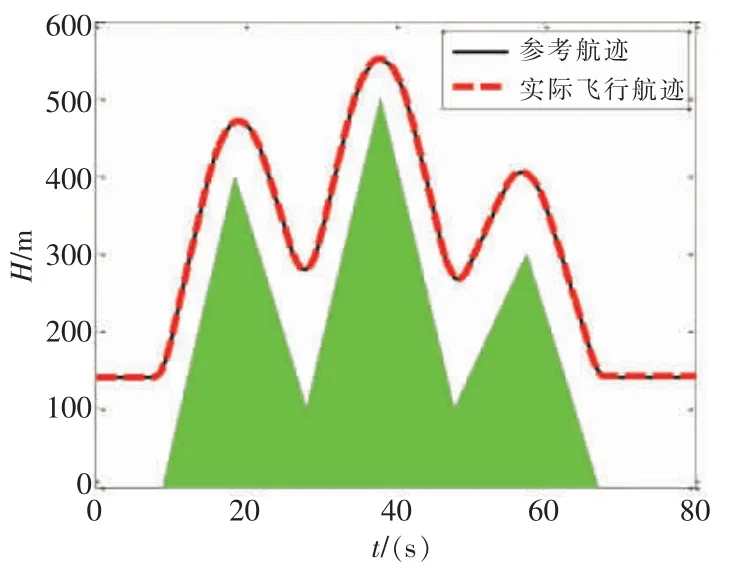
图3 飞行航迹(方案一)
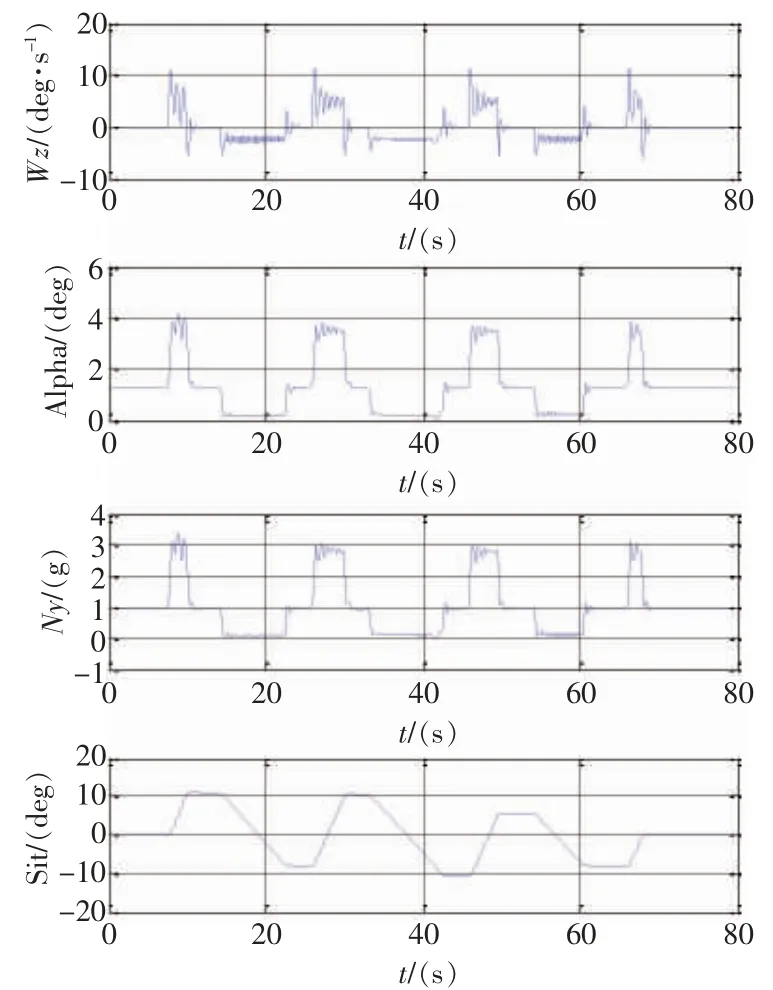
图4 飞行参数(方案一)
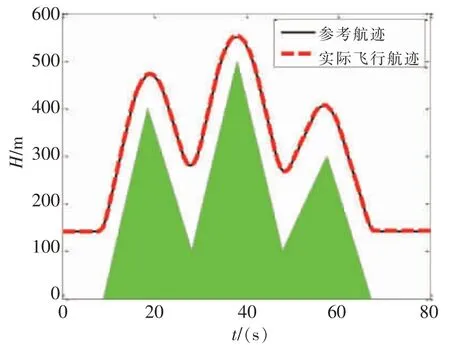
图5 飞行航迹(方案二)
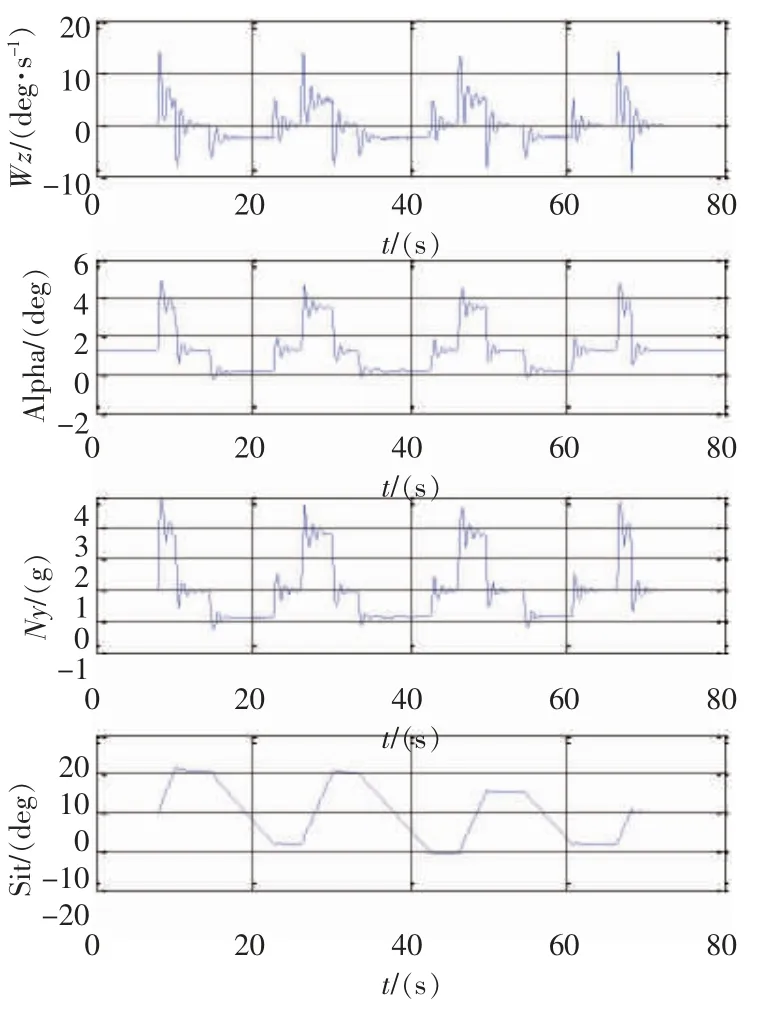
图6 飞行参数(方案二)
对于方案一,从图中可以看出,飞机基本压参考航迹飞行,最大偏离出现在过顶第二座山峰时,飞行航迹比参考航迹高1.55m,由于飞行航迹比参考航迹高,不影响飞行安全。地形跟随过程中,航迹倾角在限制范围内,法向过载稍有超限。
对于方案二,从图中可以看出,飞机基本沿参考航迹飞行,最大偏离出现在过顶第二座山峰时,飞行航迹比参考航迹高3.17m,由于飞行航迹比参考航迹高,不影响飞行安全。地形跟随过程中,航迹倾角在限制范围内,法向过载在飞机从谷底拉起和飞越谷顶时瞬时超限。
两次地形跟随最大偏离都出现在过顶第二座山峰时,这是由于第二座山峰左右坡度较陡,当飞机沿参考航迹上坡过顶时,由于上坡坡度陡和飞机惯性,会造成飞机来不及调整航迹,冲出坡顶;飞机冲出坡顶后,也会由于下坡坡度陡和飞机惯性,造成飞机需要较长时间调整下滑航迹。因此,可考虑根据地形陡峭程度进行相应控制律参数调参。
另外,虽然参考航迹是基于800km/h 规划的,但飞行过程不要求飞机以800km/h 飞行,只要飞行速度不大于800km/h 即可,速度大于800km/h 可能会造成法向过载超限。
3 结语
本文设计了两种自动地形跟随控制方案,两种方案本质都是基于飞行高度偏差和航迹倾角偏差进行控制,仿真中两种方案都能保证飞机沿参考航迹飞行,上述方案适用于低空、超低空自动地形跟随,对相关系统工程设计有一定的借鉴意义。
猜你喜欢
水文地质工程地质(2022年2期)2022-04-13
热带作物学报(2021年1期)2021-02-22
青年歌声(2019年12期)2019-12-17
科技信息·中旬刊(2018年9期)2018-10-21
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
光学精密工程(2016年1期)2016-11-07
航空模型(2016年5期)2016-07-25
百科探秘·航空航天(2015年12期)2015-11-07
中国铁道科学(2015年4期)2015-06-21
