BIT技术在运载火箭测试系统中的研究与应用
2023-04-26 08:39魏永国欧阳李青顾莉军
计算机测量与控制 2023年4期
魏永国,李 波,谢 芳,徐 玮,欧阳李青,顾莉军,高 飞,徐 昕
(上海航天电子技术研究所,上海 201109)
0 引言
近年来,随着运载火箭高密度发射任务需求,对运载火箭的测试设备的可靠性提出越来越高的要求。测试设备的高可靠性在某种程度上决定着运载火箭测试发射效率,因此,设计智能化高可靠性的运载火箭测试系统对于高密度发射具有重要意义。
BIT(build in test,机内测试或机内自检测)技术是一种具备系统自检、故障诊断、故障隔离能力的测试性设计方法。随着相关理论及技术的进一步发展,BIT技术被广泛应用于航空航天、船舶、车辆等对可靠性有较高要求的大型复杂系统中[1-2]。BIT技术通过自身软硬件实现测试功能,利用系统及设备自身的自检激励装置,组建自身闭环回路测试,可以完成对系统及设备功能、性能评估,并对存在的故障进行鉴别和隔离,在实际工程应用中,对于复杂的可靠性要求较高的场合,可以有效地提高系统及设备的状态监测能力和故障诊断能力,降低系统及设备的故障维修时间[3-7]。
1 运载火箭测试系统需求分析
目前,运载火箭缩短测试周期、优化测试流程、提高发射成功率是发射任务的重要目标。运载火箭测发控系统是火箭测试发射过程的重要组成部分,完成火箭射前测试点火。其中测试部分是运载火箭组织实施发射的最后关键一个环节,是有线检测运载火箭运行状况的唯一有效手段,其可靠性对于运载火箭发射至关重要。因此,提高测试可靠性,提高故障检测、故障隔离及排除效率对于火箭测发过程具有重要意义。
通过运载火箭测试发射过程分析,地面测试系统需要具备以下测试能力:
1)测试功能完整完备、质量可靠、操作智能简单、维护方便,故障时对箭上产品无影响;
2)测试设备进入系统测试流程前,能够完整地对其自身测试能力进行自检评估,根据评定结果解决测试设备中出现的各种故障,达到可以进入系统测试的要求;
3)进入系统测试后,按照系统测试流程,实时监测处理测试结果,根据测试结果辨别箭上设备工作运行状态,对于自身设备出现的故障,需要及时做出故障定位,以对火箭系统测试流程影响最小为前提,及时解决故障并重新恢复测试流程;
4)系统测试完成后,完成火箭测试流程数据判读处理,并形成自身测试记录日志,以备设备后期维护使用。
2 BIT设计分析
从BIT系统需要实现的功能出发,BIT设计过程中,按照BIT系统的设计原则规划,并进行系统故障模式及对应故障模式的危害性分析[8],这些分析作为构建BIT系统的基础数据,在此基础上完成系统模型搭建,系统详细设计和可靠性评估、性能评测等工作。
2.1 BIT功能
BIT系统主要用于系统及设备状态监测、故障诊断和故障隔离功能[9-10],实现系统及设备关键参数的监测,能够实时检测系统及设备的工作状态,及时判定系统及设备的功能、性能是否正常,保障系统及设备测试流程正常进行,在系统及设备发生故障时,依据设定的指标要求将故障隔离,在故障隔离点进行排故决策,适时解决系统及设备中存在的故障环节。
2.2 设计原则
BIT系统设计时需要遵循以下设计原则[11]:
1)同步性原则:系统方案论证阶段同步开展BIT设计;
2)通用性原则:BIT设计应具备通用性,以便降低设计成本;
3)简洁化原则:尽量复用系统硬件,避免将系统及设备设计复杂化;
4)全面性原则:BIT设计时需要考虑故障检测率和隔离率的要求,提高系统及设备的实用性;设计时需考虑不影响系统及设备的正常流程;设计时需考虑软件监测和硬件检测相结合的方法,提高可测试效率;同时预留外部接口,便于系统及设备进一步扩展,提高系统及设备的兼容性。
2.3 设计原理
按照系统及设备的BTI设计原则,BIT设计时一般遵循以下的设计原理[12-13]:
1)分析系统及设备的测试特点,采用自顶向下的原则,确定测试系统及设备的层次结构,规划总体方案布局,将测试系统及设备合理划分为各逻辑功能模块和单元,实现系统及设备模块化设计。
2)需要开展测试系统及系统的故障模式影响分析(简称为 FMEA)和故障模式影响及危害度分析(简称为FMECA),系统及设备设计时将FMEA及FMECA指标纳入其中,包括BIT功能要求、测试项的选取、测试性设计方法的选取以及运用软件设计等。
3)明确测试系统及设备的测试性设计要求指标。包括系统的故障覆盖率、故障检测率、故障隔离率。
4)进行测试性分析及评估,验证BIT设计是否满足测试性指标要求,并对设计的系统及设备进行评估。
2.4 BIT工作模式
依据系统设计的特点和使用要求,BIT主要包含以下3种模式[14],如表1所示。

表1 BIT测试系统工作模式
1)上电 BIT:主要用于检查系统在工作前的功能与性能是否正常;
2)周期 BIT:对系统工作时的关键功能特性进行实时监测与记录并将结果及时反馈给系统;
3)维护BIT:主要用于系统的维修检测,通过数据判读确定系统工作性能,并完成故常排查和维修,使系统恢复正常工作状态。
2.5 BIT工作流程
BIT测试系统工作流程如图1所示,其运行机制如下:

图1 BIT测试系统工作流程
1)首先系统加电,进入初始化检测,检查上电过程中设备硬件是否存在故障,模块驱动是否工作正常,软硬件进行初始化动作,对设备软硬件进行置位清零,确保设备初始工作状态正确;同时检测是否为虚警故障,若是则进行状态置位,若否进行故障排查。
2)初始化检测正常完成后,进入上电BIT检测环节,对系统对各设备进行BIT测试,检测正常进行系统流程测试,若否则进行故障排查。
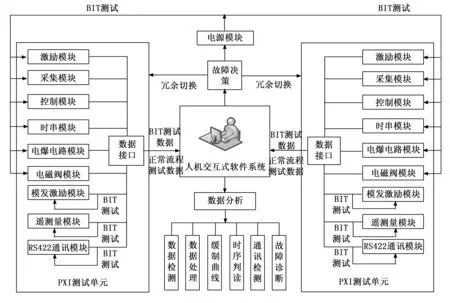
图2 运载火箭BIT测试系统总体框架
3)系统流程测试是设备在系统中的关键应用环节,如果出现故障,可利用周期BIT进行故障定位及排查。在确定设备故障的情况下,直接进入维护BIT检测,以便快速完成故障定位处理。
4)周期性BIT检测可实时监测系统中硬件设备及软件运行情况,及时发送BIT信息,给出状态置位情况,检测过程不影响系统流程测试。
5)进入维护BIT检测,快速故障定位后完成故障决策处理。同时进行系统状态置位,回到系统流程测试环节。
3 BIT运载火箭测试系统设计
BIT测试系统设计根据测试对象的系统特点,航天领领域具有成熟的行业规范,系统设计时按照航天型号产品的系统功能及性能具体指标要求,遵循测试性大纲、维修性大纲和安全性大纲的要求,设计合理的系统测试内容、测试项目及测试参数,以满足系统及设备在研制和使用阶段不同的使用要求。
由于运载火箭对于地面测试系统除功能完备、质量可靠等要求外,其中快速维护,保障测试发射流程顺利进行,保证发射任务能够零秒发射也是一个关键指标,这对于卫星及其它飞行器精准入轨、节约燃料均有重要意义。
3.1 硬件设计
图2为某通用型运载火箭BIT测试系统总体框架。该系统利用PXI总线技术,利用冗余设计将两套运载火箭测试功能模块挂接在PXI总线上,通过人机交互软件系统进行火箭测试系统流程调度管理,实现测试系统故障决策、冗余切换、数据分析等能功能。
该系统将故障排除做到模块板卡级,对于系统中器件故障直接选择对应上一级模块板卡排查,利用隔离故障板卡及快速切换冗余功能,保障系统测发流程的顺利执行。对应故障器件在系统工作接收后,维护BIT模式中进行分析排查。
按照系统功能,BIT测试系统工作过程及实施如下:
1)PXI测试单元工作状态查询:如图3所示,系统上电后及流程测试中,人机交互式软件实时读取PXI测试单元中PXI机箱传感器数据,包括电源电压、PXI机箱工作温度,风扇电压及转速,控制器CPU及内存工作状态。检查PXI测试单元各功能模块驱动是否正常在线,各功能模块初始化是否正常;通过返回值可以监测到PXI测试单元初始状态,若初始化异常,可通过人机交互软件系统直接切换到备份PXI测试单元。
2)激励、控制功能检测:测试系统激励信号是利用系统母线24 V电源作为基准,连接DC/DC模块,再通过运放调理电路连接PXI采集模块,电源管理控制利用PXI隔离输出接口电路,输出TTL电平,使用光耦芯片连接驱动电路,可以实现控制电路与功率输出之间隔离,激励信号输出端连接采集模块,对输出的激励信号进行实时测量监测,测试合格后通过继电器控制模块输出给箭上产品,避免地面测试设备异常给箭上产品带来的损伤。对于箭上某些重要信号,继电器控制输出可以采用并联双输出的方式连接与火箭连接,可以提供地面测试设备的可靠性。图4为激励控制输出单元示意图。

图4 激励控制输出单元
系统BIT设计时,设置了激励自检功能,利用测试系统母线给激励控制单元供电,控制输出端继电器模块处于常开状态,通过激励输出连接采集模块构成一个自检闭合回路。
系统上电后,系统流程测试前,输出交直流电压、电流信号进行判定,检查是否满足系统要求,若满足系统要求则进入系统流程测试;若不满足系统要求,则进行模块维护更换处理后参加系统流程测试。
系统测发流程测试中,如出现激励异常,故障隔离后,经人机交互软件判定后切换至冗余备份PXI测试单元进行系统流程测试。
3)采集功能检测:运载火箭测试系统模拟量采集分为两种,一种为关键节点的模拟量采集,系统测试时,只对某节点加电时刻的模拟量进行单次采样;另外一种为持续关注的模拟量采集;由于火箭模拟量采集需求较大,为降低工程设计成本,这两种模拟量采用两种采集方式,对于第一种模拟量采集采用多路切换输入接口连接箭上单次采用的模拟量,系统流程需要进行测量时,将当前模拟量利用多路切换输出连接万用表模块,通过切换测量可实现多个模拟量多时段测试。第二种模拟量连续采集采用PXI模拟量AD采集模块,采集模块输入端需要设置调理电路,通常需要进行分压及物理隔离处理,分压处理可满足连续模拟量采集模块的采集量程,物理隔离应用在测试系统中,是实现火箭与地面测试设备的隔离,避免地面设备故障时对箭上产品的损害,隔离单元主要由衰减电路、隔离放大器、电源电路及PXI接口电路组成,模块功能如图5所示。PXI总线主要为模块提供+5 V电源,通过隔离电源模块将+5 V转换为+15 V,为系统内隔离放大器供电,实现信号通道间隔离。前端衰减电路实现0.122的衰减比例,保证信号输入范围可以达到±40 V。

图5 隔离单元
系统BIT设计时,每个采集模块预留自检通道,作为系统监测采集功能的手段。
系统上电后,系统流程测试前,利用PXI测试单元的母线供电作为信号源发生器,输出至采集模块进行连续模拟量采集和单次采样模块采样测试,可以通过曲线绘制、数据处理判读检测采集模块是否工作正常,若工作正常,则进入系统流程测试;尤其在系统流程测试过程中,可以实时监测采集模块的工作状态,出现采集模块故障时,通过人机交互软件切换备份模块,同时也对火箭故障状态及时作出定位,及时采取排故措施。
4)时串、电爆电路、电磁阀功能检测:时串及电爆电路信号在火箭系统被认为是一种“数字量信号”,主要用于火箭分离信号的测试,信号正常输入为28 V,在输入信号大于17 V时,为高电平状态,当输入信号小于15 V时,为低电平状态。因此开关量信号属于一种数字信号,即只有“0”和“1”两种状态的信号。但由于现在处理器的IO电压一般支持TTL电平或CMOS电平,为此在处理前端,首先需对信号进行幅度变换,即将大于17 V的信号转换成TTL或CMOS信号的高电平信号,而将幅度小于15 V的信号转换成TTL或CMOS的低电平信号。为此在处理前端,首先需对信号进行有效隔离,并实现28 V到CMOS电平的转换。隔离转换电路应具有足够的响应速度,并能承受40 V输入信号。随后系统对转换后的信号进行采集、滤波和判别,滤波的目的是消除信号中所存在的抖动。系统算法根据所采集到的信号,判断信号的跳变状态、剔除突发脉冲噪声、抑制抖动效应、控制信号跳变间隔,同时根据判决结果实时向上位机发出中断请求或提供上位机实时查询功能。同时系统应能接收上位机的命令,并根据上位机命令执行相应操作,返回相应的执行结果。开关量检测电源如图6所示。

图6 开关量检测电路
电磁阀信号测试主要是检测箭上动力电磁阀及姿控电磁阀动作过程的电流曲线,从本质来看是一种小幅值高精度模拟量采集。测试电路由前端输入电路和数据处理电路组成,前端电路主要对输入信号进行调幅,抗扰处理,对于每路信号采用单独的AD转换信号,每个通道采用独立的隔离电源模块,可以保证采样速度和信号隔离,避免通道之间相互干扰以及对箭上系统的影响。前端输入电路如图7所示。
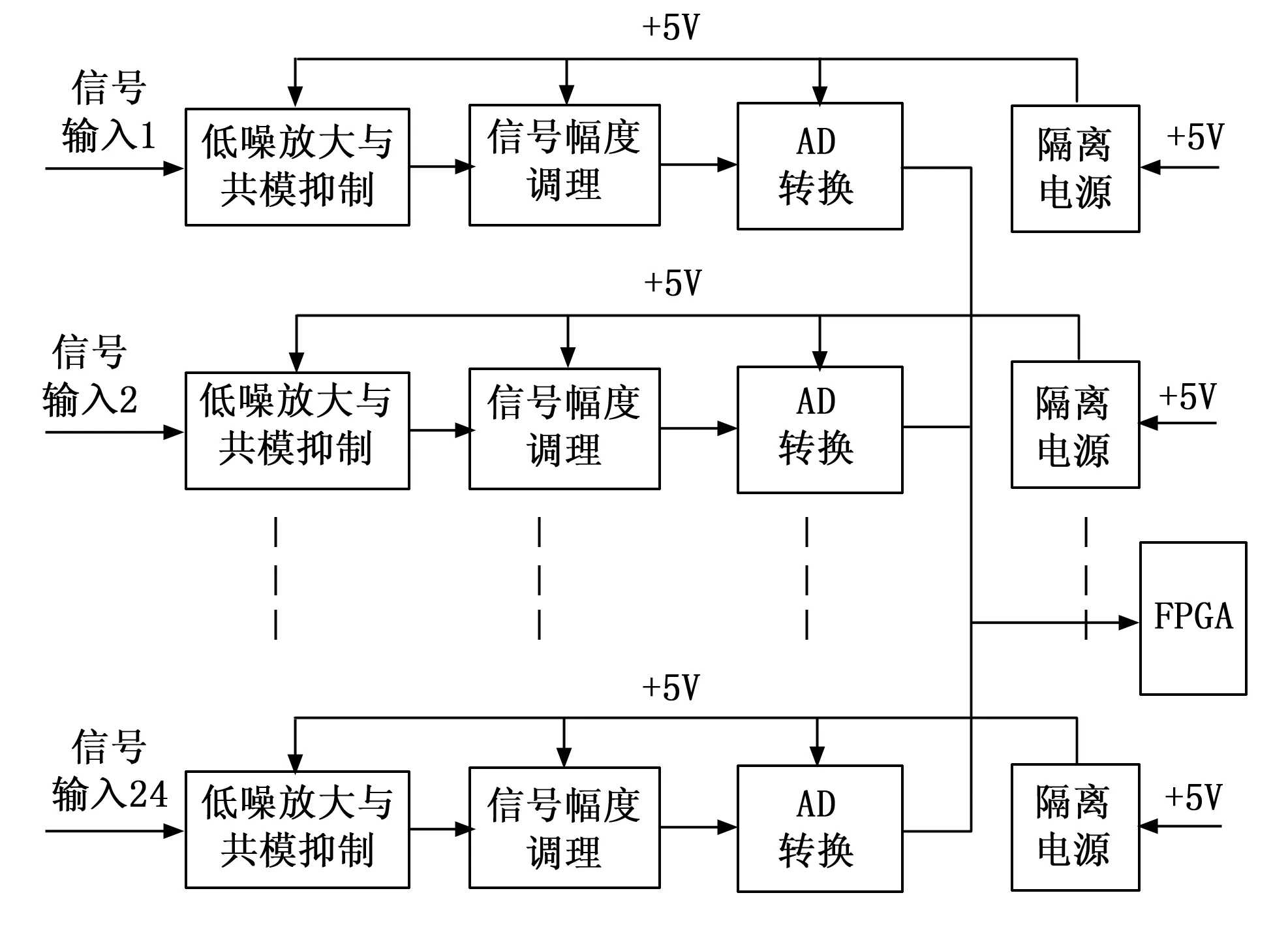
图7 电磁阀采集前端处理电路
电磁阀的数据前端处理由FPGA完成。FPGA完成对AD转换后的信号进行Sinc3滤波,输入缓存,并标记时钟,再经过FIFO缓存后通过HP接口传输给DDR3。PS端将DDR3的数据实时存储在FLASH,并通过PXI总线对数据进行打包发送。
时串、电爆电路、电磁阀功能BIT设计同3)一致,同时融合控制功能的自检测能力。时串信号自检时,信号源信号接入时串模块时,接入不同控制模块的检测通道,同时可以考核到控制模块的功能。
上电BIT设计和周期BIT设计同4)一致。
5)模发激励、遥测量测试功能检测:模发激励信号和遥测量测试功能作为运载火箭特殊的电气类信号,模发激励信号主要用于地面测发设备与火箭箭载计算机通讯的关键控制信号,两端接口均使用非标准的RS422接口完成,模发激励包括模发数码和模发移位时钟2类信号,模发信号要求为8位,模发信号高电平幅值大于1.5 V,小于6 V(宽度1 μs处)。模发移位时钟脉宽2.5 μs,周期10 μs;模发数码时钟脉宽5 μs,周期10 μs。
箭地遥测数字量用于火箭箭载计算机飞行前后运行状态监视,遥测量数字量测试主要完成箭载计算机3CPU下传的3路电平信号,遥测数字量接收采用RS422接口,遥测数字量以TTL电平输出,遥测数字量包括YC数码和YC移位时钟2类信号。其中YC移位时钟脉宽5 μs,周期10 μs,占空比50%;YC数码为不归零电平码,周期10 μs。
模发激励解码遥测量测试单元如图8所示。

图8 模发激励解码遥测量测试单元
本系统采用RS422串口通讯接口与箭载计算机接口的匹配,通过FPGA设计多路串口数据收发功能,包括模发激励、模发解码、遥测量发送、遥测量接收机异步422备用通讯,完成模发激励、遥测量接收功能。
模发激励、箭地遥测数字量模块不能通过利用外部标准源的信号进行功能测试,在模块BIT设计阶段,需考虑该功能的自检方法,因此通过模块自检功能进行检测。系统上电后,模发激励模块逐条发送模发指令,同时进行模发解码,读出寄存器输出指令,例如发送0xEO,解码为“封箭机”,可检测模发激励模块工作是否正常。箭地遥测数字量测试功能同模拟激励模块,也通过其自带的遥测量发送功能,可在系统上电后及系统流程中进行模拟功能自检。上电BIT设计和周期BIT设计同 4)一致。
6)RS422通讯功能检测:如图9所示,422通讯功能主要实现箭机、捷机、光纤惯组、程配与地面主机的422通讯,通过箭地接口将422通路与串口设备连接,选用422串口服务器,该模块具有16路独立422通讯通道,它将422接口转换成以太网接口,通过端数传网络与主机连接,完成与主机的422通讯,考虑到箭地422通讯的重要性和可靠性,系统设计时冗余422通道,提供两条独立信道,通过PXI继电器控制模件实现两通道的切换,同时监测串口服务器可对箭地422通讯的上下行数据进行接收监测。

图9 RS422通讯结构
上电BIT设计和周期BIT设计同 4)一致。
3.2 软件及工作流程设计

图10 运载火箭BIT测试系统工作流程
按照运载火箭测发流程开展软件流程设计,图10为系统工作流程,人机交互式软件采用模块化多线程设计。首先读取软件配置信息,获取本软件运行的计算机绝对路径地址,读取网络配置、协议配置、激励通道、模拟量采集模块配置、开关量采集模块配置、采样模块配置、控制通道配置、模发解码遥测量等模块配置。同时获取本机操作系统的日期和时间,作为存盘文件名称关键字,判断是否存在当日的文件夹,如果没有创建当日的文件夹,再在当日文件夹中分别测试源码数据文本文件。下一步完成PXI机箱及测试模块初始化,异常则启用冗余设备,切换PXI测试单元。完成初始化后进行PXI机箱及模块的自检,自检异常则启用冗余设备,切换PXI测试单元。
自检完成后测试模块复位和计时器的复位,程序主模块完成程序运行判别,防止重复开启软件,打开窗口最大化,网络初始化,连接服务器,线程初始化,等待服务器转发的测发主机工作指令,其中软件主线程作为单独一个线程运行,主要负责TCP字节流的组帧,解析处理。按照协议功能号分别执行,并回令给测发流程主机,本线程采取循环查询模式,每条指令按先进先出模式处理,每条指令之间延时1 ms。各功能模块执行相应的测试功能,返回相应测试值。
数据分析依托通讯进行数据的收集与保存,同时基于这些数据,实时或者事后提供给火箭测发岗位人员以直观的数据显示、数据对比判决等,协助岗位人员进行判断决策。
4 BIT系统测试结果及性能评价
4.1 测试结果
现役某型运载火箭使用该BIT运载火箭测试系统进行集成综合试验,以参加全系统综合检查项目为例,在该测试项目开始前,测试系统加电预热阶段,进行上电BIT自检测试,测试结果如表2所示,按照系统设置的功能模块进行自检,测试结果均合格,由于采集功能模块、时串功能模块、电爆电路功能模块、电磁阀功能模块测试通路数量庞大,上电自检测试均设计到模块级别,可完全识别出模块级别的工作状态。若设计进一步所有测试通道及器件级别的自检测试环节,将增加测试系统的复杂性和设计成本,反而降低了系统的可靠性。系统中其他测试功能模块均100%覆盖系统测试全过程。结果表明该测试系统工作正常,具备满足参加后续试验的条件,若出现上电BIT自检不合格,可以按照系统设置的故障预案进行排查和故障处置,及时切换备份通路或替换故障功能模块,保障系统测试流程。

表2 BIT系统上电自检测试结果
上电BIT自检合格后,可以按照全系统综合检查项目进入运载火箭测试流程,该系统进入周期BIT工作模式,根据系统研制的数据显示处理平台,可以对运载火箭及其测试系统运行状态进行实时监测,专业技术人员可以根据测试数据对火箭及其测试系统的工作状态进行综合判定。图11为数据实时显示界面。
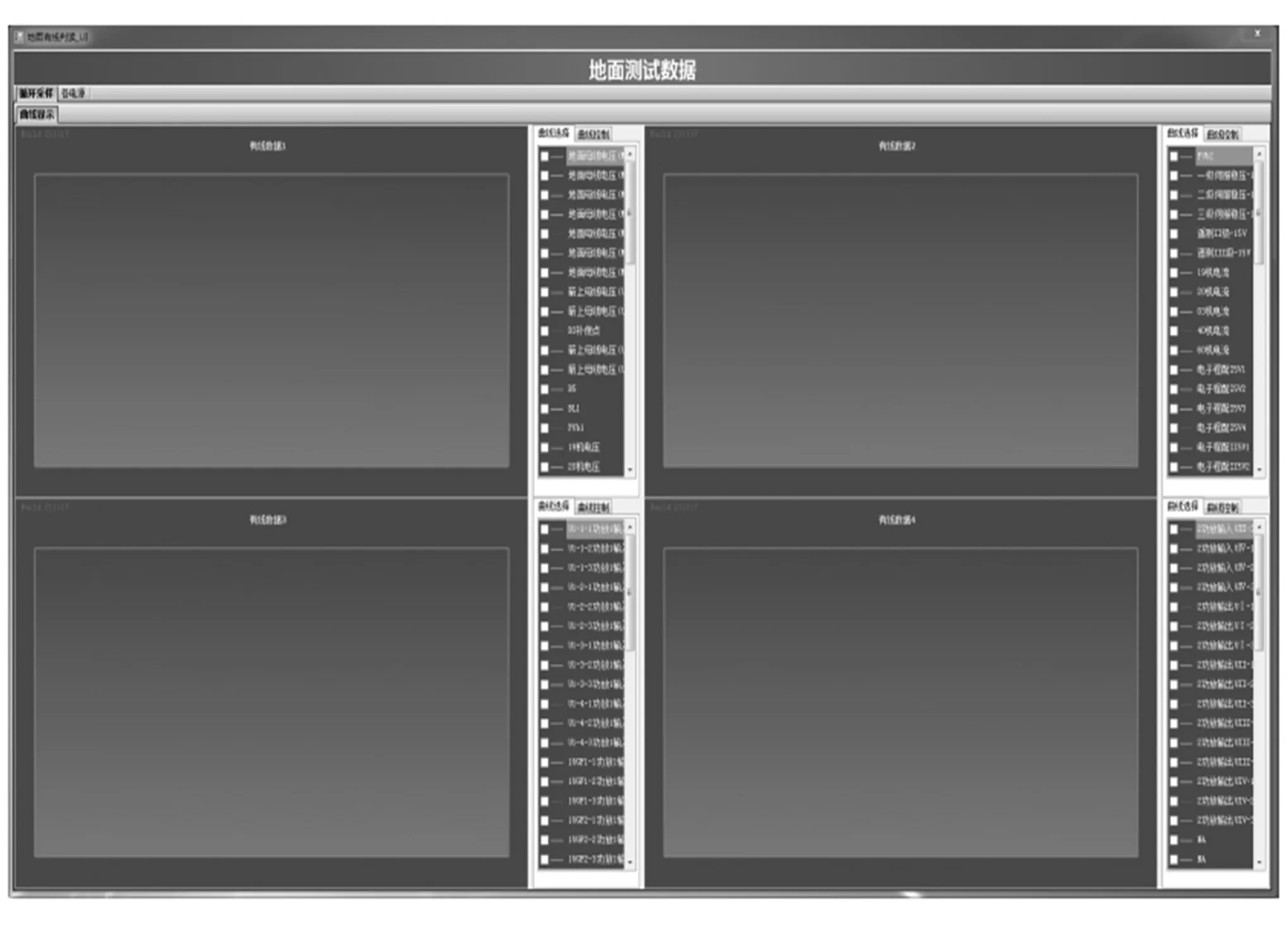
图11 数据实时监测界面
为验证维护BIT工作模式,在该系统参加火箭全系统综合检查项目中,模拟箭地RS422通讯故障,人为断开箭地RS422通讯通路,系统箭地RS422数据装订中止,系统迅速断开该故障RS422通讯主通路,做到故障隔离,同时启动备份箭地RS422通讯通路,重新进行RS422数据装订,箭地RS422通讯恢复正常,其中故障定位到故障处理约10 s,完全不会影响运载火箭正常的测试发射流程。
该运载火箭BIT测试系统可全面覆盖设备自身的测试功能,能对自身的功能及性能进行自测试,可以将故障定位到功能模块级。同时能够满足被测对象的测试需求,实时监测系统运行状态,并对火箭及其自身出现的故障做出诊断,及时进行故障隔离处置。
4.2 性能评价
在系统BIT设计中,采用故障检测率、故障隔离率、BIT虚警率等指标来衡量BIT方案的优劣[15-18]。
1)BIT故障检测率:rFD是指用 BIT 正确检测到的故障数与故障总数之比,见式(1):
(1)
式中,NT为待测产品故障总数;ND为用BIT 正确检测出的故障数。
2)BIT故障隔离率:rID是指用BIT 能够正确隔离到不大于L个故障类型的故障数与检测到的故障总数之比,见式(2):
(2)
式中,NL为在规定条件下用规定方法正确隔离到不大于L个故障类型的故障数(设规定的故障类型数为L,也即被识别故障定位到L个类型中。L即模糊度,表示故障隔离的分辨能力:L=1,即模糊度等于1,为无模糊)。
3)BIT虚警率:rFA是指BIT 发生的虚警数与故障指示总数之比,见式(3):
(3)
式中,NFA为虚警次数;NF为真实故障指示次数。N=NF+NFA,为BIT指示故障(报警)的总次数。
虚警是指 BIT 指示被测产品有故障,而实际不存在故障的现象。在BIT设计使用过程中,解决虚警问题始终是检验系统可用性的关键因素之一[19-21]。可利用大数据设置BIT检测参考值和阈值。
以某通用型运载火箭测试系统中激励功能BIT门限参数设置为例,首先获取不同环境不同测试项目中某激励信号测试值,且均符合系统要求。
amax=max(α1,α2,…,αn)
(4)
式中,α1,α2,…,αn为n个实测值,αmax为其中的最大值。
βmin=min(β1,β2,…,βn)
(5)
式中,β1,β2,…,βn为n个实测值,βmin为其中的最小值。
(6)
式中,r为αmax与βmin的中间值,作为BIT测试系统中激励功能判定的门限值,在系统引用中很大程度地降低了虚警率。
5 结束语
本文为解决运载火箭测发控系统测试流程复杂、故障排查难的问题,为提高测试可靠性、设备维护性,提出将BIT技术引入运载火箭测试领域,构建运载火箭BIT测试系统,上电BIT阶段,可完整自检测系统各功能模块测试状态;周期BIT阶段,实时监测系统及设备的运行状态;维护BIT阶段,对系统及设备出现的故障进行修复。实现了系统参加试验全过程状态可检测,出现的故障可隔离并能够及时处置,缩短了系统故障诊断时间,简化了现场工程技术人员维护工作,优化了运载火箭测试发射流程,在实际应用中具有良好的工程应用效果。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
今日农业(2021年10期)2021-07-28
幽默大师(2020年11期)2020-11-26
摄影之友(影像视觉)(2019年3期)2019-03-30
摄影之友(影像视觉)(2019年2期)2019-03-05
摄影之友(影像视觉)(2018年12期)2019-01-28
劳动保护(2018年5期)2018-06-05
国际医学放射学杂志(2016年4期)2016-08-22
办公自动化(2016年18期)2016-08-20