NASA电气化飞机推进系统控制方案分析
2023-04-24 13:25高杨
航空动力 2023年2期
推进系统电气化是实现航空业节能减排、降低噪声的最佳途径。美国国家航空航天局(NASA)格伦研究中心为此开展了一系列的研究,从飞机构型到飞发一体化设计,从推进系统控制到飞发协同控制,以求扫除飞机推进系统电气化道路上的技术障碍。
美国国家航空航天局电气化飞机推进(EAP)项目从创新技术、飞发一体化设计、推进系统构型入手,针对热管理、高效电动机、转换器、材料、控制逻辑和能量管理等技术领域进行研究及试验验证。为实现飞机构型和电气化推进系统的最优配置,项目先后提出了9种不同的飞机构型,研究范围从固定翼到旋翼,从通航到支线,力求涵盖所有在2035年可实现技术成熟度并投入市场使用的电气化飞机构型种类。此外,针对各类构型的特点和差异,相应地设计了电气化推进系统的组成和布局,探求飞机控制与推进系统的控制协同。
电气化飞机及推进系统构型
由于飞机构型与推进系统构型有着非常紧密的联系,在电气化概念下对飞发一体化设计的要求更高,因此,对飞机构型的研究必须与对电气化推进系统构型的研究同步进行。
NASA的EAP项目中包含了对固定翼和旋翼机构型的研究。例如,在N3-X项目下,对飞机机体构型进行了较大的改变,实现了翼身融合的高升阻比设计;在升力-巡航(lift and cruise)垂直起降飞机项目中,设置推进螺旋桨,增加了前飞推力。电气化推进系统在电力储存和传输方面非常灵活,大大拓宽了飞机构型的创新边界,飞机设计可按需选用分布式电推进或边界层吸入式风扇等先进推进方案。
NASA的EAP系统同样也涉及多种构型,包括全电推进、并联混合电推进、串联混合电推进、全涡轮电推进、部分涡轮电推进和串并联混合电推进,系统复杂程度逐步递增。相比常规飞机推进系统而言,EAP系统有其优势,但总体更为复杂,部件更为分散,对集成要求更高,而控制技术对确保复杂系统高效可靠工作起着至关重要的作用。

NASA电气化飞机构型
EAP系统级控制方案
考虑到最大化飞发一体化设计的优势,9种飞机构型所采用的推进方式各有不同,虽然同类型推进系统主要组件趋同,但其布局、工作模式以及系统级控制方案都有所差异。
全电推进系统控制方案
NASA 的X-57 飞 行 验 证 机 采 用了全电推进系统以及飞发一体化技术,在机翼布置多个小型电推进器。验证机具有2 个位于翼尖的巡航螺旋桨,可提升推进效率,此外,还有12 个高升力螺旋桨布置在机翼的前缘,在低速飞行时提供升力。驱动推进器的电动机的功率完全来自2 个电池供电组,2 个翼尖巡航推进器各有1 台电动机,分别由电源A和电源B 供电,确保在1 组电池失效或1 台巡航推进器的电动机失效时巡航推进器还能够继续工作。12个高升力螺旋桨各由1 台电动机驱动,电源A 为奇数号的升力电动机供电,电源B 为偶数号的升力电动机供电,因此,在电池失效时可以最小化推力不对称情况。X-57 验证机装有常规的飞行控制界面,电动机驱动的推进器并不会为实现横摆力矩或其他飞行控制功能而提供专门的推力差。因此,2 台巡航电动机/推进器的输出推力相同,同样,12 台升力电动机/推进器也以相同的转速/输出推力运行。
混合电推进系统控制方案
NASA的研究中采用了混合电推进系统的机型包括SUGAR Volt、“飞马”(PEGASUS)支线飞机和横列式直升机,而3种机型所用的混合电推进方式各有特点。
波音公司的SUGAR Volt为先进的跨声速桁架支撑机翼(TTBW)构型,采用了并联式混合电推进系统。飞机配装有2台涡扇发动机,由电池驱动的交流电动机负责为每台涡扇发动机低压转子补充机械功率。
“飞马”新型并联混合电推进+电推进支线飞机采用了并联电燃气结构协同利用方案,通过优化混合电推进器布局,实现气动收益最大化。PEGASUS飞机的并联混合电涡桨发动机布置在翼尖,从而减小下洗效应,2个位于机翼内的电推进器提供起飞和爬升阶段所需的额外推力,可在巡航时折叠降低风车效应,在其尾部还有一个边界层吸入电推进器。由1个电池系统为2台并联混合电推进涡桨发动机的轴、2个安装在机翼上的电推进器和尾部推进器提供电功率。由于推进系统采用了分布式布局,PEGASUS飞机与NASA正在进行的集成式飞行推进控制研究非常吻合。
混合电推进横列式直升机为NASA革命性垂直起降技术(RVLT)项目下提出的概念型飞机,其两个旋翼为横向排布,飞行时转速固定,通过调节桨叶桨距角实现飞行控制。该直升机推进系统包括2台涡轴发动机、1台电动发电机和1组电池。涡轴发动机和电动发电机通过齿轮箱与驱动2个旋翼的横轴相连,保证双发工作和单发失效情况下2个旋翼都能够得到足够的驱动力。在悬停和低速飞行阶段,电动发电机从电池处获取电功率,向横轴输出机械功率;在巡航阶段,电动发电机从横轴获取机械功率给电池充电。

X-57 验证机全电控制方案
涡轮电推进系统控制方案
NASA更青睐于涡轮电推进系统,因此,无论是对固定翼飞机的研究还是旋翼机的研究,都会结合涡轮电推进系统进行分析,涉及机型包括STARC-ABL、N3-X、ECO-150、倾转旋翼机以及升力-巡航垂直起降飞机。其中,固定翼飞机采用部分涡轮电推进系统,倾转旋翼机采用全涡轮电推进系统。
STARC-ABL为NASA研发的单通道带后置边界层推进的部分涡轮电推进飞机。包含2台安装在机翼上的齿轮涡扇发动机和安装在机尾由电动机驱动的风扇推进器,2台齿轮涡扇发动机在提供推力的同时还有部分机械功率输送给了发电机以产生电功率供给尾部电动机,通过1台整流器将发电机的交流电(AC)转换成直流电(DC)并传输给直流总线,电动机控制器控制逆变器为尾部风扇电动机提供所需的电功率,保证尾部风扇达到要求转速。
N3-X是NASA概念型翼身融合飞机,采用了分布式超导涡轮电推进(TeDP)系统。在N3-X中,由2台涡轴发动机分别驱动2台发电机,进而为超导电动机供电,驱动14台分布式风扇推进器。翼身融合的高升阻比设计使分布式风扇可以从机体上部的“厚”边界层吸走大量气流,进而极大地减小飞行阻力,同时降低油耗。2台涡轴发动机布置在翼尖无扰动自由流环境下,可实现功率输出最大化。
ECO-150飞机为实验系统航宇(ESAero)公司设计的EAP飞机。该支线飞机配装有一个嵌入在机翼内的分布式涡轮电推进系统。ECO-150飞机采用了对开翼设计,涡轴发动机和发电机舷外安装,驱动机翼内安装的一排电动风扇。ECO-150同N3-X一样,采用了分布式推进,罗罗公司对后者的研究表明通过合理设计微电网,对称的推力分布构型能在出现发动机或风扇失效时保持推力。

PEGASUS并联混合电推进+电推进控制方案
ECO-150飞机和N3-X飞机的2台涡轴发动机动力涡轮轴转速恒定,由变频交流发电机的控制器调节发电机的输出电压至目标给定值,整流器将发电机输出的交流电转化成直流电,并通过直流总线输送给电动机用于驱动推进器。储能设备与各直流总线相连,既能保持总线稳定,又能在总线出现故障时提供应急电源,从直流总线上提取电功率,转换成交流电,然后供给电动机用于驱动推进器。每个电动机/推进器为独立控制运行,通过协调14个推进器的推力输出实现一体化飞控,如飞机横摆控制。功率分配排布允许4台发动机分别给独立的直流总线供电,系统内的实时功率需求由推进器指令转速表示,并且所有子系统及其控制器都遵从该指令。
电气化的倾转翼机作为NASA RVLT项目的另一概念型飞机,与横列式直升机不同,采用了全涡轮电推进系统。在飞机的倾转翼上安装了4个螺旋桨,在直升机模式下,机翼向上倾转,可实现垂直起降和悬停,利用自动倾斜器周期变距完成飞控;在飞机模式下,机翼向前倾转,可实现前飞,利用变距和偏航修正完成飞控。在两种飞行模式转换过程中,固定变距角,利用总桨距和襟翼实现飞行姿态修正。飞机的推进系统包括1台涡轴发动机、1台交流发电机、4台电动机和1组电池。涡轴发动机驱动发电机,然后发电机的交流输出功率经整流器输送给直流总线,电动机控制器控制逆变器向电动机输送所需的电功率,进而产生扭矩传输给4个齿轮箱以驱动螺旋桨,齿轮箱之间通过横轴互连,以确保在单电动机失效情况下4个螺旋桨的转速一致。电池与直流总线相连,根据当涡轴发动机或发电机失效时可完成2min悬停所需功率定义电池尺寸。
涡轮电推进升力-巡航飞机同样也是NASA RVLT项目下提出的概念型飞机。飞机翼展上安装了8个双叶升力旋翼,仅为实现垂直起降功能,在巡航状态下停转并顺流。1个推进螺旋桨安装在飞机尾部,在巡航状态下提供前推力,所有的旋翼和螺旋桨都为桨距固定、转速可变。飞机推进系统的中部为高电压电池网和直流总线,直流总线为电动机控制器/逆变器供电,操控各个交流电动机,每个螺旋桨/旋翼都有各自对应的交流电动机。由涡轴发动机驱动交流发电机,产生的交流电经整流器后转变成直流电输送给高压电池网,该构型使得飞控系统能够独立控制各个推进器的转速,从而可安全地解决单推进器失效所造成的影响。
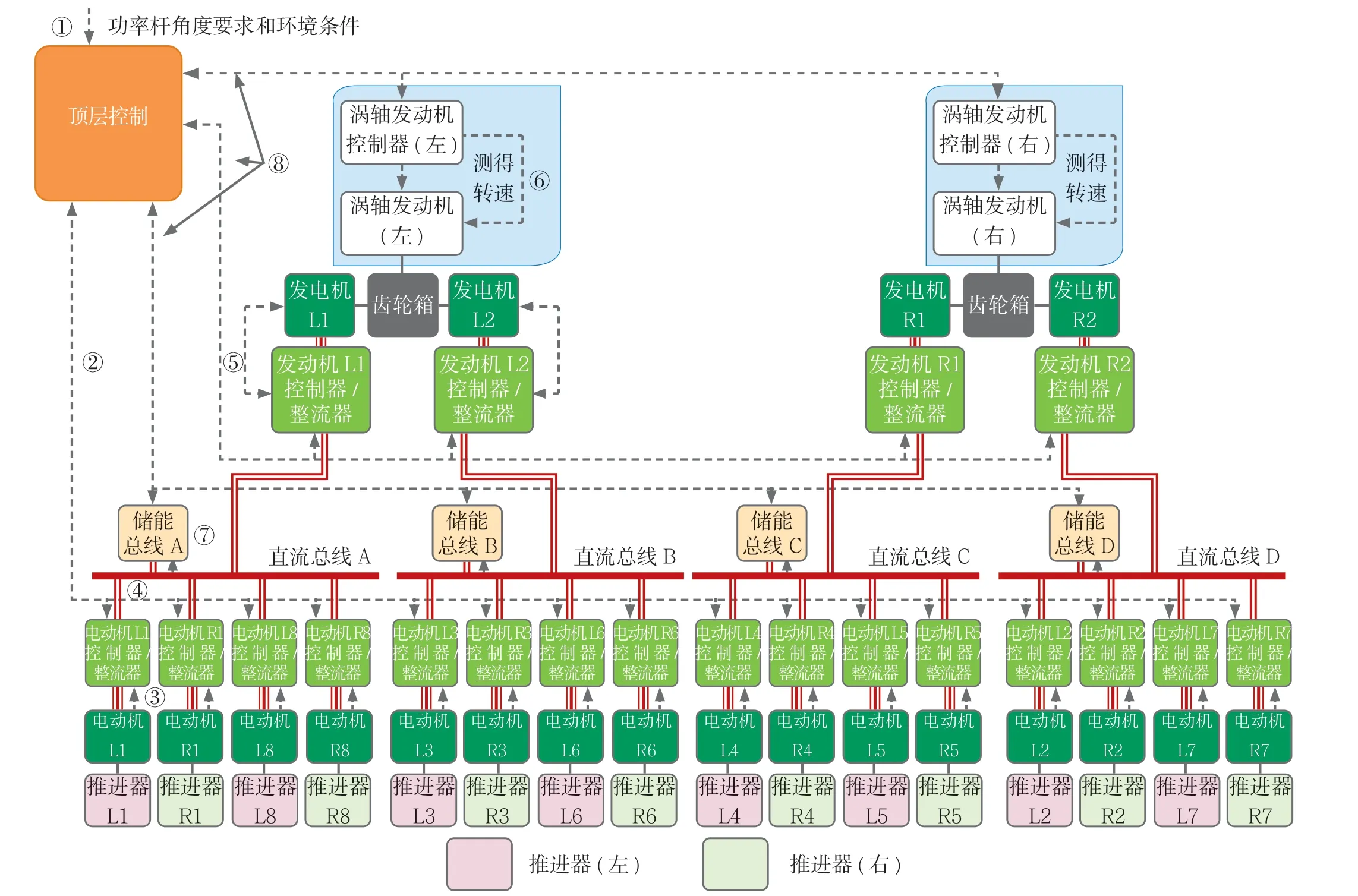
N3-X/ECO-150分布式涡轮电推进控制方案
对EAP控制方案的思考
通过对比不同飞机构型下系统级控制方案,可见都包含了多个互联的子系统,涉及大量的状态变量和输入/输出状态。针对这些特性,可采用的系统级控制方式包括集中控制、分散控制、分级控制、多代理控制和联合控制,每种方式各有利弊。目前NASA EAP构型研究下的各类系统级控制方案均采用了分散控制方式,即各个下属子系统(如燃气涡轮、发电机、电动机/风扇、电池)控制器都有专门的局部控制器,独立于其他子系统控制器运行。该控制方式降低了因子系统失效而造成系统级故障的风险,但相对传统的集中控制方式复杂度大大增加,且在子系统控制间的匹配和迅速响应方面提出了挑战。
后续可开展不同EAP控制策略(如分散式、集中式、联合式)性能的评估对比。关键评估项可以是多个候选控制设计方法的稳定性、鲁棒性、设计复杂度等。相关设计考虑可包括电气总线是否需要储能设备(如电池、电容器)来缓冲不同功率载荷所带来的影响,或者燃气涡轮发动机内是否有足够的惯量承受预计的功率载荷变化而不会损耗发动机的运行能力。还可以考虑系统级热管理要求和控制系统在热管理中的作用。电气部件对热管理会提出较大的挑战,需要从优化子系统运行控制和整个任务包线下子系统相互影响着手应对这些挑战。
EAP为系统级控制设计提供了多种可能性,此外,也为革新燃气涡轮发动机设计和控制提供了可能。由于EAP构型集成度高且包含储电设备,也可通过电气方式调整施加在涡轮机械轴上的扭矩,NASA的涡轮电气化能量控制(TEEM)研究在传统燃油控制作动器上集成了电动发电机和储能装置,这种燃气涡轮的电气化使得两个发动机轴之间可以相互补充、提取或传输机械功率,在发动机瞬态转换时优势明显,可提升发动机失速裕度,减小运行时的温度峰值。
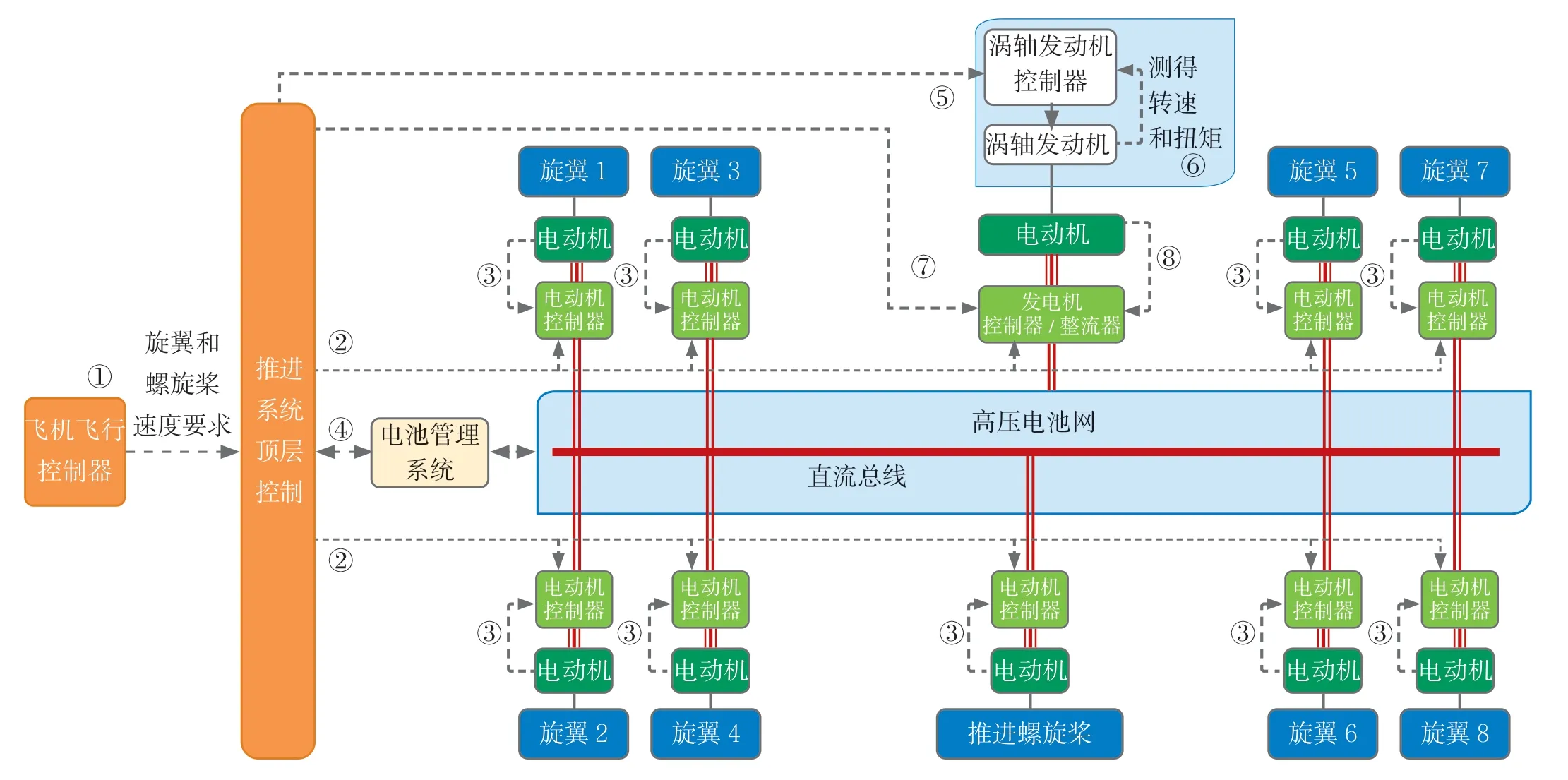
升力-巡航飞机全涡轮电推进控制方案
结束语
由于EAP系统的复杂度和集成性越来越高,在带来额外挑战的同时,也开拓了常规飞机推进设计上无法实现的创新机遇。为了EAP系统效率的最大化,确保足够的鲁棒性,必须从系统级开展控制设计和分析。对多个不同构型EAP系统的控制方案的对比充分展示了各个控制方案的复杂度和挑战性,可为未来EAP系统建模、控制设计和评估奠定基础。
猜你喜欢
车主之友(2022年6期)2023-01-30
水利建设与管理(2022年7期)2022-08-06
云南画报(2021年9期)2021-11-12
舰船科学技术(2021年12期)2021-03-29
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
云南画报(2020年12期)2021-01-18
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2017年10期)2017-04-20
学习月刊(2015年10期)2015-07-09
航天返回与遥感(2014年4期)2014-07-31