小功率内燃机车用永磁同步电机调速系统的建模与仿真
2023-04-21 12:12:40孟凡顺
时代汽车 2023年8期




摘 要:由于结构简单、体积小、质量轻、损耗小、效率高等特点,近年来永磁同步电动机(PMSM)已成为轨道交通领域研究的焦点。本文介绍了PMSM在控制系统中的优势,利用Matlab|simulink仿真软件,采用坐标变换、SVPWM算法,建立PMSM及其矢量控制系统的仿真模型。通过观测定子三相电流、电机转速、转矩以及d、q轴电流的变化,对系统中的参数进行调整。结果表明,该调速系统调速特性好、响应速度快,验证了采用=0的SVPWM矢量控制对PMSM的可行性与合理性。
关键词:SVPWM矢量控制 永磁同步电机 MATLAB仿真
Modeling and Simulation of Permanent Magnet Synchronous Motor Speed Regulation System for Low-power Diesel Locomotives
Meng Fanshun
Abstract:Due to the characteristics of simple structure, small size, light weight, small loss and high efficiency, permanent magnet synchronous motor (PMSM) has become the focus of research in the field of rail transit in recent years. This paper introduces the advantages of PMSM in the control system, and uses Matlab|simulink simulation software to establish a simulation model of PMSM and its vector control system by using coordinate transformation and SVPWM algorithm. By observing the changes of stator three-phase current, motor speed, torque and D and Q axis current, the parameters in the system are adjusted. The results show that the speed regulation system has good speed regulation characteristics and fast response speed, which verifies the feasibility and rationality of SVPWM vector control using =0 for PMSM.
Key words:SVPWM vector control, permanent magnet synchronous motor, MATLAB simulation
1 引言
PMSM作為内燃机车的关键动力执行机构,与异步电动机相比具有体积小、功率因数高、过载能力强等特点,已逐渐被业界公认为未来轨道交通牵引传动的一个发展趋势。随着PMSM的发展以及永磁材料的不断发掘和改善,PMSM在电动汽车领域的应用已逐渐成熟,但在轨道交通领域还处于起步阶段,因此具有一定研究意义[1]。
结合内燃机车的工况,本文对PMSM调速系统进行建模与仿真,搭建矢量控制系统模型,通过调整相关参数,得到了平稳的电流、电机转速、转矩等数据,验证了矢量控制对内燃机车永磁同步牵引系统的可行性与合理性[2],为PMSM在内燃机车上的应用积累经验。
2 永磁同步电机的数学模型
为了简化分析,对PMSM进行理想化假设:
(1)PMSM为理想电机;
(2)忽略铁芯饱和的影响;
(3)不考虑磁滞损耗和涡流损耗;
(4)输入电机的工作电流是对称的三相正弦电流。
在同步旋转坐标系下电动机定子绕组电压方程为:
(1)
式中:、为定子电压在d-q轴的分量;为定子电流在直轴上的电流分量;为定子电流在交轴上的电流分量;R为定子上的电阻;为定子磁链在直轴上的磁链分量;为定子磁链在交轴上的磁链分量;是电角速度。
其定子磁链的方程为:
(2)
式中:为直轴上的电感分量;为交轴上的电感分量;为永磁体的磁链。
其电磁转矩的方程为:
(3)
式中:为电机极对数。
本文采用基于转子磁场定向的矢量控制,通过分析发现,转子磁链与直-交轴系的直轴磁链相耦合,为了简化控制,得到没有耦合的控制量,在直轴和交轴上对定子电流进行分解,获得两个相互正交的励磁电流分量和转矩电流分量。对、分别进行控制,其控制性能与直流电机相同,使控制方式更为简便[3]。
3 永磁同步电机SVPWM矢量控制系统
3.1 永磁同步电机矢量控制系统的结构图
系统设计为电机转速和直轴电流双闭环的矢量控制系统,矢量控制系统的结构图如图1所示,其主要由PMSM、逆变器、SVPWM模块、dq-αβ变换及反变换模块、ABC-αβ变换模块、电流调节器和转速调节器组成。
本控制系统首先对电机的实际反馈转速与给定的转速进行差值计算,将计算结果传输给转速调节器,从而获得定子电流的参考值;然后对电机实际直轴电流大小与给定的直轴电流大小进行比较,从而获得直轴电流的参考值。再通过PMSM检测电路确定、、,经坐标变换,将定子电流转换为d-q坐标系下的和分量,将和分别与参考值比较,然后通过两个电流调节器的计算,将计算结果传输给dq-αβ变换模块,计算出、两个电压矢量的大小,通过SVPWM模块产生相应的控制信号,最终实现了电机转速和直轴电流双闭环的矢量控制。
3.2 SVPWM模块
两电平空间矢量调制SVPWM与构成逆变器电力电子器件的工作状态相关,尤其是电力电子器件的导通顺序、导通时长和开关状态的组合。三相牵引逆变器电力电子器件的工作状态共有八种组合方式,每种组合方式均对应一个空间矢量电压,当电力电子器件均导通或均关断时对应零矢量电压。在复平面上对六个非零空间矢量电压进行映射,根据工作顺序进行首尾相连,最终复平面由六个部分组成,每一个部分对应于一个扇区,如图2所示。
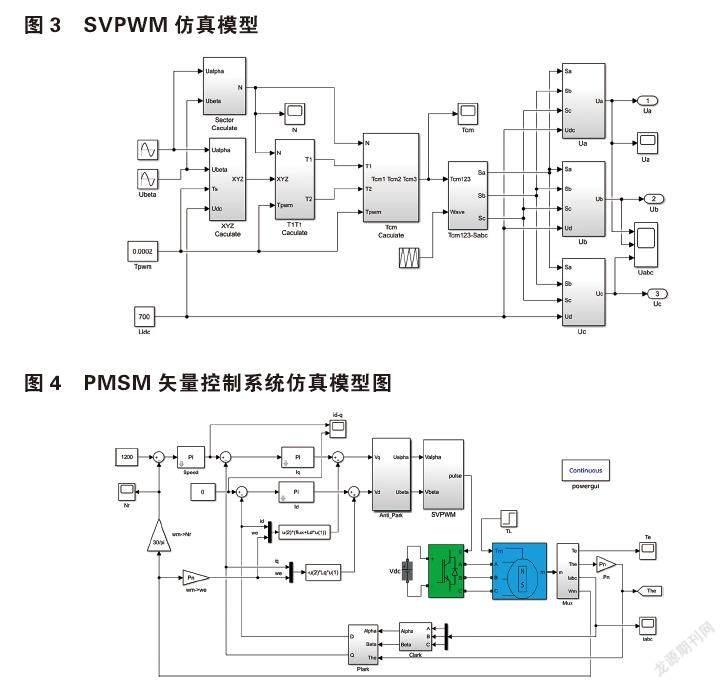
为了使一周期内基本电压矢量的平均值与期望值相同,SVPWM根据平均值等效的方法,对基本电压矢量进行选取,从而合成期望的电压矢量。为了对给定电压进行控制,首先需确定电压矢量处于哪个扇区,在时域通过零矢量和所在扇区的两个相邻电压空间矢量的组合来获得,然后对矢量作用时间T1和T2进行计算,从而确定电力电子器件的导通与关断的顺序以及对应的时刻ta、tb、tc。為了使电力电子器件的开关损耗处于最小状态,通过选择零矢量的方法,确定开关器件的作用时间和切换点。通过确定参考电压矢量所在扇区、计算每个扇区的零矢量作用时间的大小和非零矢量作用时间的大小、判断每个扇区的切换点,将各扇区的切换点与三角波载波信号进行比较,最终产生变换器所需的PWM脉冲信号,搭建如图3所示的SVPWM仿真模型[4]。
4 仿真结果分析
4.1 PMSM矢量控制系统仿真模型
根据图1所示SVPWM矢量控制系统的结构框图,结合基于转子磁场定向的矢量控制,在Matlab|Simulink环境下搭建如图4所示的仿真模型[5]。其中,PMSM参数为:额定转速1200r/min,极对数=4,交轴电感=12mH,直轴电感=6.1mH,定子电阻R=0.958Ω,永磁体磁链=0.1827Wb,转动惯量,阻尼系数,速度环PI调节器参数为=0.14,=7,电流环PI调节器参数分别为:的PI参数=6.71,=1053.8;的PI参数=13.2,=1053.8。仿真条件为:为311V,为10kHz,为10μs,算法采用变步长ode23th算法,相对误差为10-4,仿真时间0.5s。
4.2 仿真结果分析
系统仿真时间设置为0.5s,假设在t=0s时内燃机车开始起动,给定转速为1200r/min,此时系统空载启动,PMSM由0r/min加速至1200r/min;初始时刻内燃机车负载转矩为0N*m,机车运行到0.25s时,负载转矩增加至20N*m,此时矢量控制系统响应迅速,电机转速轻微波动后又恢复到1200r/min。定子的三相电流、、,d-q轴电流、,电机电磁转矩及电机转速仿真曲线如图5、6、7、8所示。
由图5分析可知,在开始时刻定子电流存在波动,随后波形趋于稳定呈正弦波。在0.25s时给系统突然加载,波形发生畸变,幅值存在一个显著地跃升,随后趋于稳定,仿真结果符合PMSM调速运行时定子电流的波形。图6中,d、q轴电流均为定子电流,在0.25s时系统加入负载,q轴电流有明显升高,随后趋于稳定,而d轴电流从始至终基本保持为零。由此可知,矢量控制系统采用的=0控制策略是成功的。图7为PMSM的输出转矩波形。由图可知,在0.25s时系统突然加入20N*m负载,转矩明显上升后趋于稳定,基本保持在20N*m处。在加入负载时,转矩发生振荡的时间较短,控制效果比较理想。如图8所示,当电机的转速由零增加到1200r/min时,虽然初期电机转速出现短时间的超调现象,但是动态响应速度较为迅速,且在0.25s时突加负载,电机也能快速恢复到给定转速值,表明控制系统具有良好的动态性能和抗干扰能力,能够满足电机实际控制性能的需求。
5 结论
本文对小功率内燃机车用永磁同步牵引电机在同步旋转坐标系下的数学模型进行分析,采用了采用=0的矢量控制方法,通过电机转速外环和直轴电流内环控制策略,在Matlab|Simulink软件环境下,搭建了PMSM矢量控制系统模型[6]。仿真结果验证了小功率内燃机车用永磁同步电机矢量控制系统的正确性。通过对仿真结果分析可知,当系统的负载发生变化时,矢量控制系统可以实时快速调节,响应迅速、抗干扰能力强。由于电机模型是简化理想的,且系统处于理想状态下进行的仿真,与实际工作过程存在一定差距,故本仿真结果仅为小功率内燃机车永磁同步电机矢量控制系统的应用提供参考依据。
参考文献:
[1]冯江华.轨道交通永磁同步牵引系统研究[J].机车电传动,2010.9(5).
[2]孙越,孟凡顺,胡继胜.内燃机车永磁同步发电系统的研究[J].变频器世界,2020.2:21-24.
[3]袁雷.现代永磁同步电机控制原理及MATLAB仿真[M].1.北京航空航天大学出版社,2016.4.
[4]闵婕,于惠钧,雎铁杰,荣俊梅,李林.地铁永磁同步电机SVPWM矢量控制[J].新型工业化,2017,7(6):11-18.
[5]解小刚,陈进.采用=0的永磁同步电机矢量控制系统MATLAB/Simulink仿真[J].新型工业化,2016,6(5):47-54.
[6]苏宝龙.变频调速永磁同步电机的矢量控制[J].防爆电机,2017,52(3):40-42.
猜你喜欢
汽车工程学报(2016年5期)2017-01-16 02:42:50
计算技术与自动化(2016年4期)2017-01-11 14:06:23
现代情报(2016年11期)2016-12-21 23:33:46
电子技术与软件工程(2016年19期)2016-12-19 18:43:28
科学与财富(2016年26期)2016-12-01 21:15:53
科技视界(2016年25期)2016-11-25 19:58:36
科技视界(2016年21期)2016-10-17 18:04:55
中国科技博览(2016年15期)2016-08-23 00:59:37
电脑知识与技术(2016年13期)2016-06-29 21:41:37
科技视界(2016年12期)2016-05-25 11:07:56