DeepFilter 在东平湖水下及近岸地形测量项目中的应用研究
2023-03-31 06:16徐花芝张奇伟郑伟安
科技与创新 2023年6期
徐花芝,张奇伟,孟 萌,王 博,郑伟安
(山东省国土测绘院,山东 济南 250013)
1 研究背景
机载LiDAR 测量技术的出现和发展,为地理空间三维信息获取提供了全新的技术手段[1],获取的点云具有海量、高冗余、局部数据缺失、点密度不均一、非结构化的特点[2]。
目前,机载LiDAR 点云已经广泛地应用于高精度大比例尺数字高程模型(DEM)制作、电力巡线、建筑物三维建模、变化检测、森林资源调查、海岸带测量、城市规划等领域。点云滤波分类是点云应用的基础性工作,虽然国内外对点云自动滤波方法进行了大量研究,但是滤波效果差强人意,还有许多问题没有得到解决,且已有点云分类商业软件需要大量人机交互,效率低下,已经成为目前激光雷达测量技术进步的最大障碍[3]。
近年来,深度学习和人工智能技术快速发展,在很多行业得到了应用。在测绘地理信息领域,对基于深度学习的影像分析与解译技术进行了大量的研究,并取得了一定的成果。运用深度学习技术,实现机载LiDAR 点云地面点和非地面点快速精细滤波的全自动化处理,是点云数据处理的发展趋势[4]。
为了提高山东省点云滤波的自动化精度和效率,与武汉大学软件研发团队和广州建通开展三方合作,建立沟通交流渠道,开展深度学习辅助点云分类方法的研究,将基于深度学习的点云自动分类技术引入到山东省国土测绘院。根据山东省地形特点,按照平原、丘陵、山地、低矮建筑物、高大建筑、低矮植被、高植被等不同地形,分别选取一定数量的样本数据,基于深度学习算法对点云成果样本进行大量训练,形成了适合山东省地形特点的点云最优滤波模型,提高分类效率。
2 项目应用
2.1 项目概况
为丰富内陆水下地理信息资源,加强水上水下一体化测量系统研究与应用,为给水资源利用、水环境保护、防洪排涝及重大水利工程建设提供数据支撑。根据山东省规划建设需求,山东省国土测绘院承担了东平湖1∶2 000 水下及近岸地形测量项目。
项目范围面积为22.88 km2,鉴于摄区形状不规则、面积大、工期紧、空管情况复杂、适航天气少等原因,为按时圆满完成任务,投入了一台机载LiDAR 和一架大棕熊通用飞机用于数据获取,其中Orion H300 型机载LiDAR 集成CS10000 航摄仪。综合考虑摄区的地形特点、仪器设备的飞行要求及空域情况等因素,将整个摄区划分为1 个分区,共飞行航线28 条,绝对航高1 000 m,点云密度为1~2 点/m2,航线敷设如图1所示。
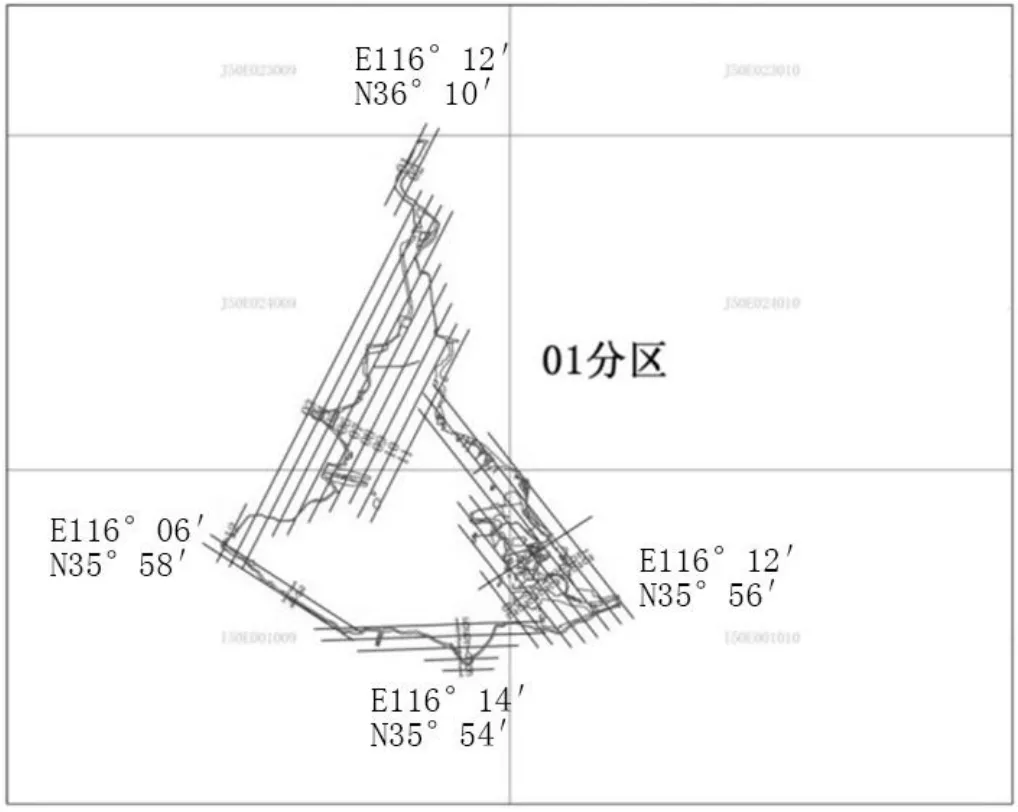
图1 东平湖摄区航线敷设示意图
2.2 DeepFilter 优化技术路线
经过样本训练后的点云辅助分类DeepFilter 软件对山东省的机载LiDAR 点云滤波效果较好,但是此软件功能单一,不能进行航线切割、点云分块、航线校正、重叠带去除等前期处理。结合山东省国土测绘院已有的点云处理软件,提出新的适合山东省地形地貌的机载LiDAR 点云自动化提取地面点成果解决方案,优化生产流程,即前期航线切割、点云分块、航线校正、重叠带切割等利用Terrasolid 处理,然后利用Terrasolid 设置参数、DeepFilter 全自动处理进行自动过滤,对比分析2 种分类结果,选取效果好、效率高的结果进行人工编辑,生产DEM(Digital Elevation Model)成果。
3 效率对比
外业航飞获取的数据经过预处理后获得LiDAR点云数据,分别用Terrasolid 老流程和DeepFilter 优化流程进行生产试验,对分类效率进行统计对比,如表1所示。
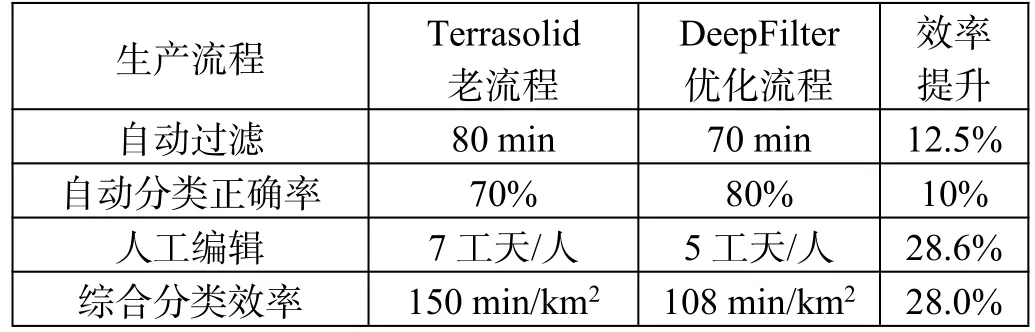
表1 新老流程分类效率对比表
通过项目生产试验可以发现:DeepFilter 软件自动化自动过滤成果的正确率,在现有软件的基础上提高了10%,达到了80%,自动过滤效率也比Terrasolid 软件提升了12.5%;基于DeepFilter 软件的适合山东省地形地貌的点云分类解决方案,由于自动分类正确率的提高,人工编辑效率提升了28.6%,工作量大大减少,使得综合分类效率整体提高了28%,成功地优化了生产流程。
4 结果分析
4.1 DeepFilter 自动分类精度分析
对DeepFilter 自动分类结果进行统计,有9 种类型地形,具体如下:S1 为平原空地,S2 为平原植被,S3为乡村房屋,S4 为城区房屋,S5 为大型建筑,S6为梯田,S7 为崎岖地表,S8 为山区缓坡,S9 为山区陡坡。
与人工编辑成果对比分析发现:S4、S7、S9 这3种地形DeepFilter 自动分类精度高于人工编辑分类精度,不再需要进行人工编辑,尤其是S7 和S9 明显高于人工编辑分类精度,如图2 所示;S2、S3、S6 这3种地形DeepFilter 自动分类精度与人工编辑分类精度差不多,几乎不需要再进行人工编辑;S1、S5、S8 这3 种地形DeepFilter 自动分类精度低于人工编辑分类精度,还需要进一步进行人工编辑,尤其是S8 明显低于人工编辑分类精度。
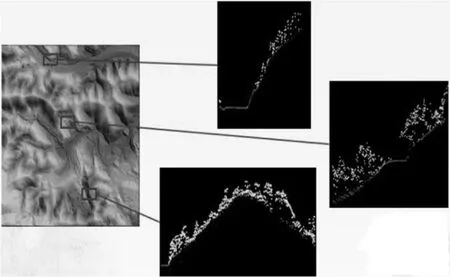
图2 山地自动分类结果展示
综上,DeepFilter 自动分类精度整体上可达80%,各地形精度统计如图3 所示。
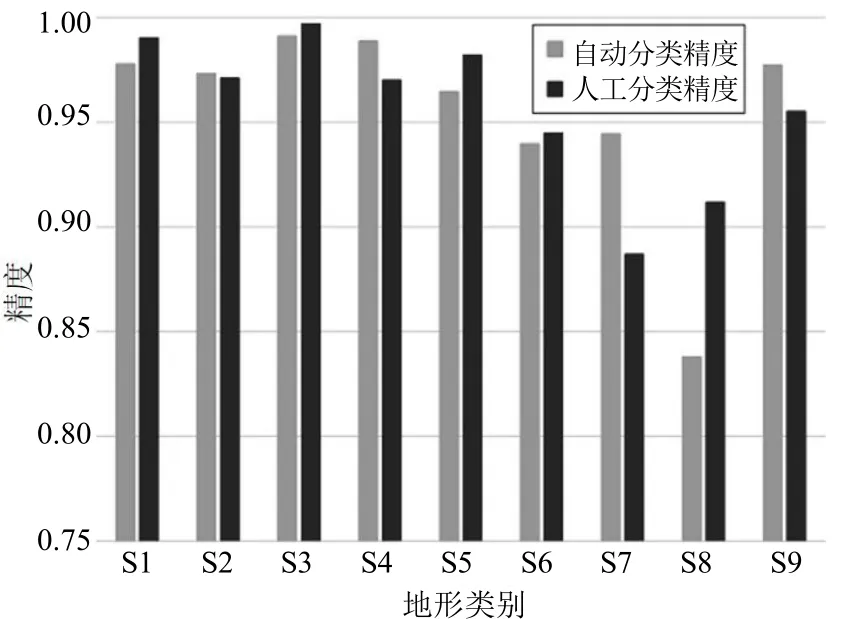
图3 各地形平均分类精度
4.2 DeepFilter 自动分类效率分析
DeepFilter 目前处理效率为平均2~3 min 处理100 万点(显卡为GeForce GTX 1 080Ti)。同样处理22.88 km2,点云密度为1~2 点/m2,1∶2 000 比例尺的点云数据,Terrasolid 自动分类需80 min,DeepFilter自动分类需70 min,自动分类效率提升了12.5%。
4.3 新的优化的解决方案中自动分类精度分析
新的优化的解决方案采用DeepFilter 进行自动分类,因此自动分类精度整体上可达80%。
4.4 点云分类(自动+人工)综合效率分析
新的优化的解决方案由于DeepFilter 自动分类精度的提高(达到80%,提升了10%),使得人工编辑效率大大提升,通过东平湖摄区1∶2 000 航空摄影项目生产试验提高了28.6%,因此综合分类效率整体提高了28.0%。
5 结束语
目前,虽然DeepFilter 软件在自动分类方面取得了很大的进步,但其功能单一,不能满足机载LiDAR 点云项目的全流程生产,例如:①不能进行航线切割、点云分块、航线校正、重叠带切除等前期处理;②航线重叠部分会分类到航线边缘,引起航线间高差;③对特殊高密度(如密度为160 点/m2)的点云数据无法处理,需继续优化;④虽然自动过滤精度有所提升,但仍然需要人工进行编辑。
运用深度学习技术,以实现大规模机载LiDAR 点云数据地面点和非地面点快速精细滤波的全自动化处理,是点云数据处理的发展趋势。因此,下一步建议对DeepFilter 软件持续跟进,继续加强与武汉大学软件研发团队和广州建通的交流合作,持续改进软件,使软件更加开放灵活。
猜你喜欢
山东交通科技(2022年3期)2022-08-05
中国集体经济(2022年9期)2022-04-12
——山东省济宁市老年大学之歌
老年教育(老年大学)(2021年10期)2021-11-12
小哥白尼(神奇星球)(2021年12期)2021-03-08
中国学校体育(2016年11期)2016-12-01
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27