航天遥感器用泵驱两相流体回路热真空试验研究
2023-03-31 07:46:32孟庆亮赵振明陈祥贵朱许
北京航空航天大学学报 2023年3期
孟庆亮,赵振明,陈祥贵,朱许
(1.北京空间机电研究所,北京 100094;2.先进光学遥感技术北京市重点实验室,北京 100094)
随着航天遥感技术的不断发展,光学遥感器核心组件——光电转换器件对温度的要求越来越高,这些器件需要满足较低的温度变化和较高的温度稳定度的条件[1-2]。光电转换器件对工作环境温度的要求非常严格,温度波动过大会增大器件的暗电流和热噪声,降低信噪比,从而降低分辨率。为满足空间遥感相机高精度成像需要,光电转换器件的温度在全寿命周期内要满足±2.0 °C 稳定性的要求。泵驱两相流体回路(mechanically pumped twophase loop,MPTL)技术是一项先进的两相流热量管理技术,具有控温精度高、传热距离远、传热量大等优点,其在航天热控领域具有广阔的应用前景,特别适用于航天相机、活动天线、大功率激光器等对控温要求高和传热量大的载荷或单机的热控[3]。近年来,MPTL 技术逐渐在航天领域开始搭载或应用,已经在相关应用领域取得了较大的进展[4-7]。
为了验证MPTL 的工作特性,国内外研究者开展了一系列的研究工作,主要包括系统级运行特性和部组件与系统之间的相互耦合特性。在系统级工作特性方面,刘杰[8]在实验室条件下对MPTL 系统的启动特性、稳态和瞬态运行特性进行了研究,指出MPTL 技术相较于毛细泵驱动流体回路技术的优势;van Es 等[5]对阿拉法磁谱仪探测器(AMS02)用MPTL 产品在轨启动、主备切换、转速调整的工作特性进行了介绍,结果表明产品在轨运行稳定;孙西辉[9]对AMS02 用MPTL 系统的并联蒸发器进行了热源启动、瞬态和稳态运行稳定性试验研究,指出MPTL 系统在保证长距离传热和高精度控温的同时,能通过调节自身参数避免两相流不稳定性;刘长鑫等[10]基于试验对MPTL 系统的流量漂移现象进行了研究,表明流量漂移量与系统阻力高度相关;赵振明等[11]通过仿真与试验研究了MPTL 系统用于CCD 器件散热时启动特性、并联运行状态及内部工质流动与传热特性,研究表明,MPTL 系统可以很好地满足航天遥感器的散热与控温。
在部组件与系统之间的相互耦合特性方面,研究者主要关注了储液器与主回路之间的相互影响。黄臻成[12]研究了MPTL 系统受到扰动(温度边界扰动、热源功耗阶梯变化)时储液器和主回路的响应特性,指出二者之间耦合特性对于设计MPTL系统的重要性;袁俊飞等[13]对储液器的响应特性与系统的启动和稳定运行之间的响应关系进行了研究,指出蒸发器工作点的控制与储液器内参数密切相关;van Gerner 等[14-15]利用数值模拟分别对工质为CO2和R134a 的MPTL 系统在热源功率变化时的储液器及其他组件的工作特性进行了研究,指出储液器和回路的参数对系统运行稳定性的影响;孟庆亮等[16]通过系统级仿真模型研究了热源功率变化时,两相控温型储液器与系统级主回路之间的动态传热传质特性,指出储液器内气液两相参数、主回路参数会受到热源功率变化的影响。
然而,目前的研究缺少对MPTL 系统工作特性在热真空环境下(真空和变化的轨道外热流)的验证与测试,以及对在此环境下热源频繁开关机时系统稳定性的研究。热真空环境下开展试验是航天器热控产品研制过程中重要的测试项目。由于地面上不存在也无法创造热控产品实际运行环境,热控产品的工作性能只能在发射后处于实际的空间环境和工作状态下才能得到真正的检验。热真空环境下的试验是在模拟的空间热环境中使MPTL产品按照运行状态吸收和排散热流,通过测量热控产品的各个参数对其性能进行验证,这个试验是在地面上最接近实际空间热环境条件下进行的,是验证MPTL 产品传热性能的最有效手段。基于此,本文搭建了航天遥感器用MPTL 试验系统,系统使用了具有被动冷却能力的两相控温型储液器。本文在热真空环境下,对MPTL 系统在不同工况下的启动、控温和散热等工作特性进行了研究,并对新型储液器的工作性能进行了验证。
1 试验系统
1.1 MPTL 系统
1.1.1 系统组成
图1 给出了航天遥感器用MPTL 系统组成原理,主要由机械泵、储液器、换热器、预热器、蒸发器组件、辐射冷凝器及管路组成。MPTL 系统内部工质为丙烷,该工质与系统各组件具有良好的相容性,适合长期在轨使用。此外,为监测系统的绝对压力及温度的变化趋势,在储液器附近布置了一套绝对压力传感器,各组件壁面和进出口布置了若干热电偶。图2 为不包含辐射冷凝器的系统实物图。
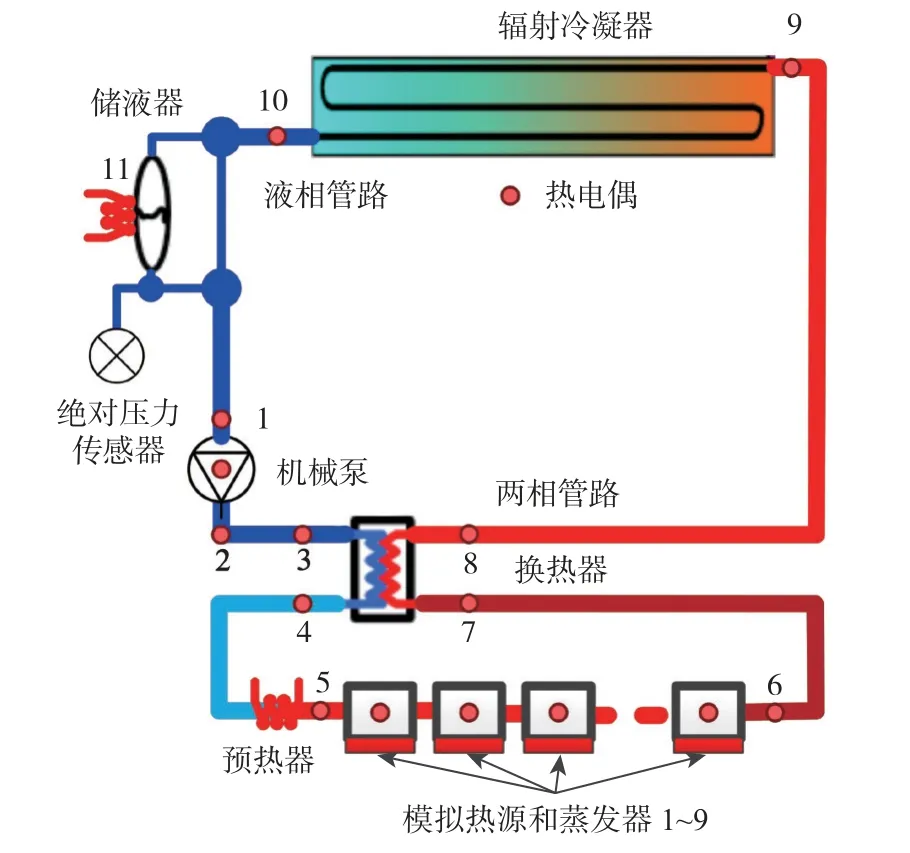
图1 MPTL 系统组成Fig.1 Schematic diagram of MPTL system
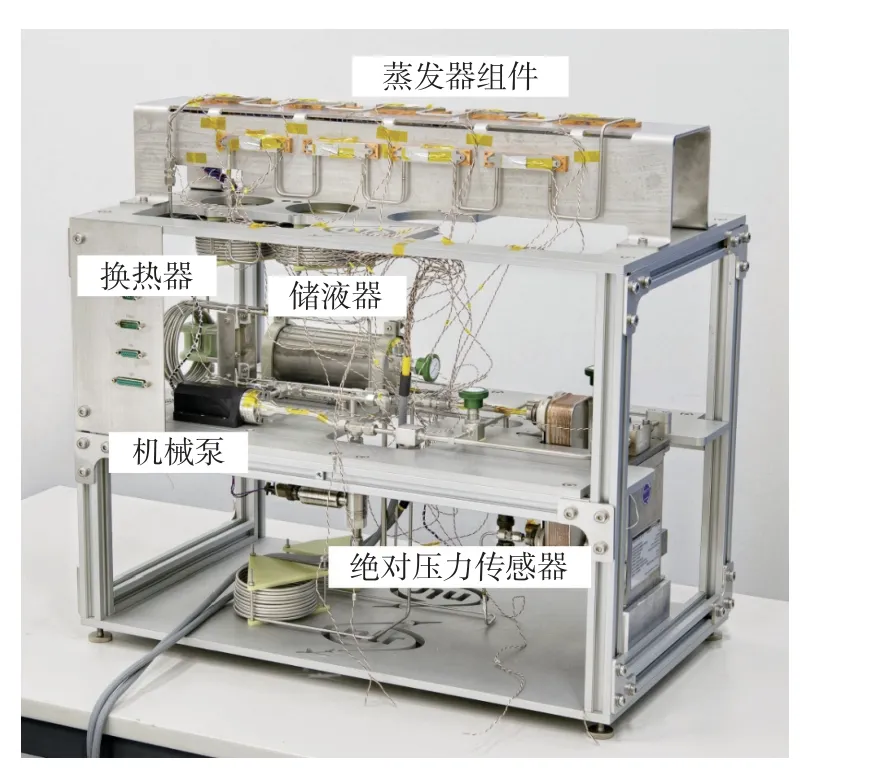
图2 MPTL 系统实物图(不含辐射冷凝器)Fig.2 Photograph of MPTL system (not including radiator)
1.1.2 系统工作原理
MPTL 系统的工作原理可以通过工质在系统中循环的压焓变化过程进行分析。图3 给出了系统内工质压焓变化示意图,图中的数字与图1 相对应。系统的变化过程包括:①升压过程,机械泵的输入功率部分转化为工质的动能,工质从状态点1变为状态点2;②升温过程,由于管路的阻力,压力下降,工质状态点变为3,经过换热器的加热,变为换热器出口的状态点4,再经过预热器的加热,变为两相饱和态点5;③汽化过程,进入到蒸发器的工质吸收热源的热量,干度不断增大,受管路阻力的影响,工质饱和温度有所下降,蒸发器出口的状态点变为6;④换热过程,由于管路的阻力,变为换热器热端入口的状态点7,再经过换热器冷却,变为换热器热端出口的状态点8;⑤冷凝过程,受两相管路流阻的影响,工质状态点变为冷凝器入口处状态点9,在辐射冷凝器的作用下,工质变为干度为0 的饱和态点10,再进一步冷却变为过冷态1,随后进入机械泵进行继续循环。状态点11 位于储液器内部,为系统控温点。
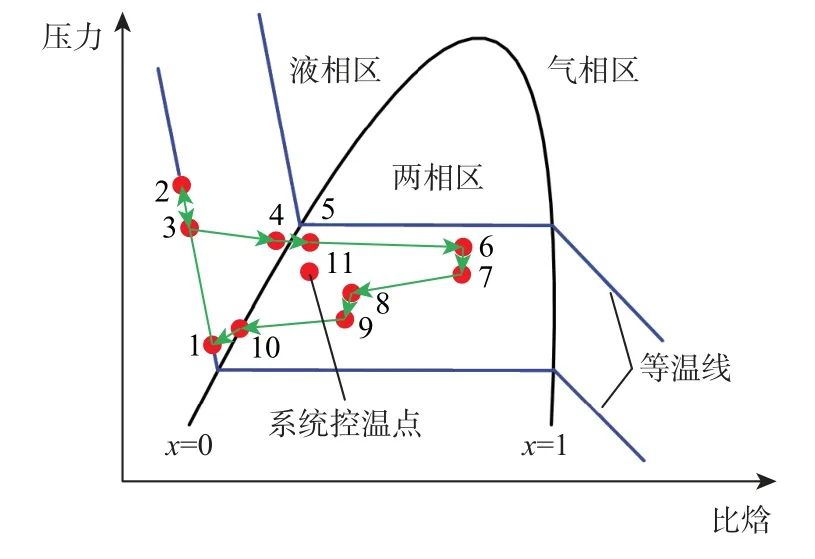
图3 MPTL 系统内工质压焓变化示意图Fig.3 Pressure-enthalpy diagram of fluid in MPTL system
1.1.3 系统主要组件及参数
为保证MPTL 系统在轨长期稳定的运行,系统选用的机械泵为北京空间机电研究所自研的微型屏蔽式离心泵,图4 给出了屏蔽式离心泵实物图。屏蔽式离心泵只有静密封,无动密封,具有耐摩擦、长寿命、低漏率、免维护等特点,特别适合对介质输送寿命与可靠性要求都很高的航天热控领域。离心泵的流量范围为0~6 mL/s,扬程范围为0~20 m,驱动功率为0~15.0 W。此外,由于离心泵的体积和质量均非常小,产品工作时微振动的范围仅为0~60.0 mg,对遥感器在轨成像影响较小。

图4 屏蔽式离心泵实物图Fig.4 Photograph of shield centrifugal micropump
图5 为两相控温型储液器的实物图。其内部为气液两相饱和态工质,通过控制工质的饱和温度,即可实现压力的控制。图中:Acc1~Acc3 为温度测点,分别对应了储液器气相侧、液相侧和出口管路壁面温度。区别于传统储液器的冷却方案,本文提出了一种具有被动冷却设计的两相控温型储液器,该储液器通过储液器回流的过冷液与其内部工质的温差实现自动冷却。图6 给出了冷却过程示意图。从辐射冷凝器回流的液体,在进入机械泵之前被分为2 条支路,一路进入到图5 所示的毛细管中,通过毛细管与储液器内部流体进行冷量传递,随后该路流体与另一路汇合共同流入机械泵中。进入储液器中的支路与储液器中的液相换热量的计算表达式为

图5 两相控温型储液器实物图Fig.5 Photograph of two-phase thermal-controlled accumulator
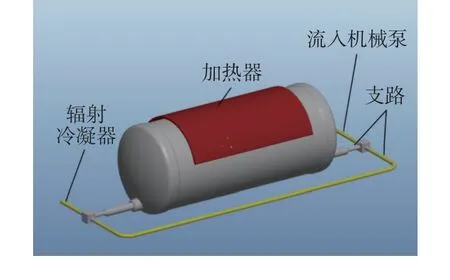
图6 两相控温型储液器冷却过程示意图Fig.6 Schematic diagram of cooling process in two-phase thermal-controlled accumulator

式中:Re 为雷诺数;f 为摩擦系数;Pr 为普朗特数;n=0.3。
通过代入式(1)~式(3)中的参数,得冷量为5.0~10.0 W,可以有效保证储液器的控温需求。本文的设计省去了传统冷却使用的半导体制冷装置,降低了设计的复杂度,减少了功耗需求,提升了设计的可靠性。
蒸发器通过3D 打印技术进行制造(见图7),材质为316 L 不锈钢,尺寸为90.0 mm×17.5 mm×4.0 mm。管路内部为直径2.9 mm 的蛇形流道,用于两相工质换热与流动的空间,如图8 所示。相比于传统的机加和焊接装配技术,3D 打印技术降低了蒸发器的研制难度,节省了原材料,提高了生产效率。图9给出了蒸发器和模拟热源在空间的布局。模拟热源采用与探测器器件相同热容的紫铜块加工而成,并通过在模拟热源上方加载一定的功率模拟探测器器件发热,蒸发器和模拟热源通过导热胶和螺钉连接。系统包含了9 个分布式热源,用于模拟遥感器的核心探测器组件,每个热源的发热量为5.0 W,共45.0 W。为了实现分散式热源的散热与控温,9片蒸发器串联使用。
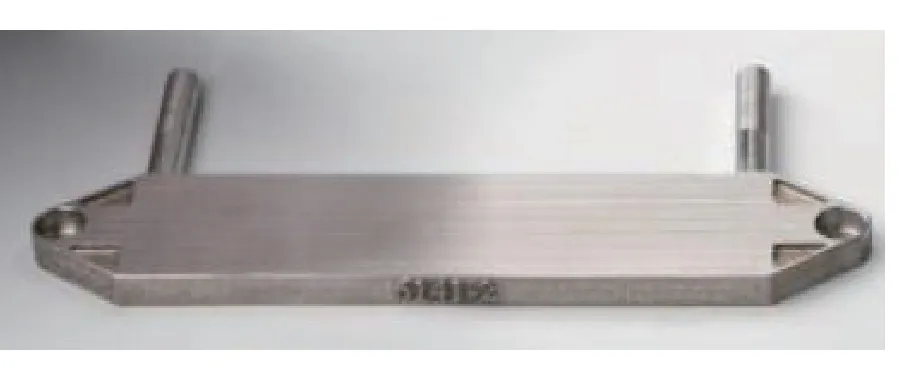
图7 3D 打印蒸发器实物图Fig.7 Photograph of evaporator by 3D printing

图8 蒸发器内部流道Fig.8 Internal flow channel of evaporator
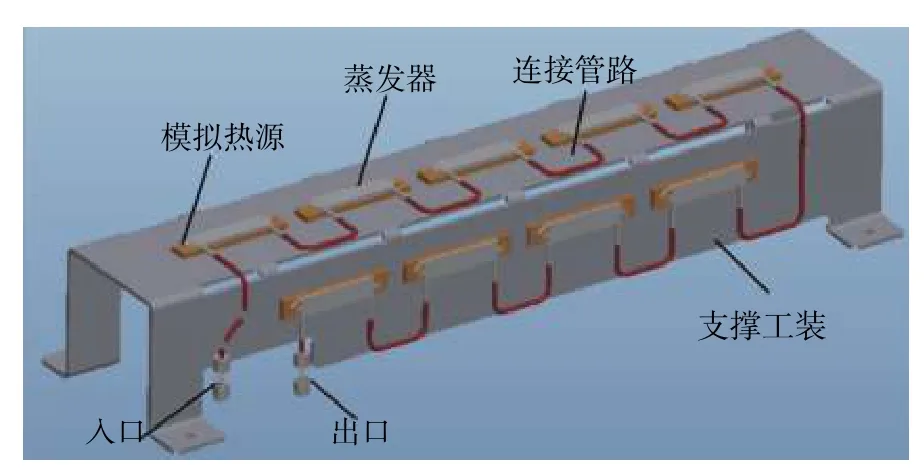
图9 蒸发器及模拟热源空间布置Fig.9 Spatial layout of evaporators and simulated heat sources
表1 给出了MPTL 系统的主要参数。换热器为套管式逆流换热器,管长6.0 m,内部和外部管路分别为3.0 mm 和6.0 mm 直径的不锈钢管路。辐射冷凝器由带有安装槽的铝合金薄板和3.0 mm 直径的不锈钢管路组成,不锈钢管路通过导热胶和卡箍与铝合金板进行导热连接。辐射冷凝器面积为0.32 m2,辐射面喷涂发射率为0.86 的热控涂层,用于热量的高效排散。

表1 MPTL 系统主要参数Table 1 Main parameters of MPTL system
1.2 试验参数
1.2.1 试验条件和工况
图10 给出了MPTL 产品在真空罐内放置图。真空罐内压力不高于1.3×10-3Pa,热沉温度不高于100 K,温度分布不均匀性不大于±5.0 K,热沉表面发射率不小于0.9;真空罐内表面发射率不低于0.9,吸收比不小于0.95,用于实现与MPTL 辐射器的高效热交换。除辐射冷凝器外,MPTL 系统的其他组件均放置在控温小舱内,控温小舱各舱板的控温精度为±1.0 K,用于模拟产品在轨工作环境温度。辐射冷凝器背面包覆20 单元多层组件,用于削弱冷凝器与其他组件真空条件下的辐射换热。为降低各组件的相互干扰,MPTL 系统的各组件均包覆多层组件。MPTL 系统通过隔热垫放置在真空罐平台上。此外,MPTL 产品在轨工作时,辐射冷凝器除受到真空低温的影响,还受到轨道外热流的影响。表2 给出了外热流变化值,轨道周期为5 671.0 s,试验过程中将按照表2 周期加载。热真空试验时,外热流通过在辐射冷凝器背面加载一定的热功率实现。
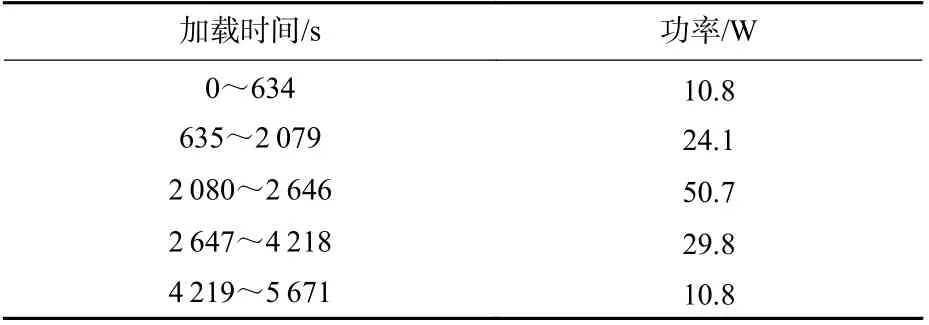
表2 外热流随时间周期变化值Table 2 Temporal variation of external heat flux

图10 MPTL 产品真空罐放置图Fig.10 Layout of MPTL in vacuum tank
试验共进行了2 个工况,试验内容如表3 所示。
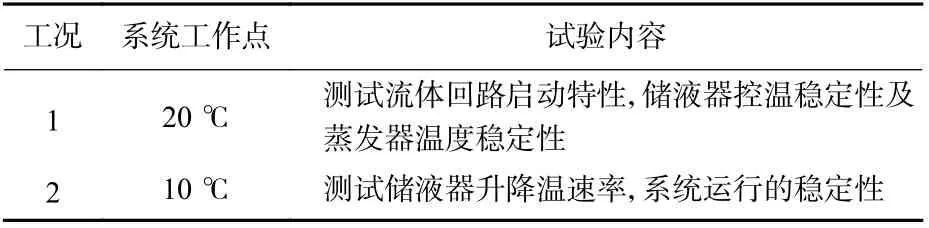
表3 试验工况Table 3 Test items
1.2.2 微重力影响分析
MPTL 系统的储液器和主回路内存在气液两相流体,由于气液介质存在了较大的密度差,重力效应可能会影响系统的流动和传热特性,微重力下系统会呈现出与地面条件不同的工装特性。储液器可以通过内部设置的毛细结构有效实现流体的管控和温度控制[17]。杜王芳等[18]详细评述了关于重力无关性的研究进展,对于分析多相热流体系统重力无关性具有重要的指导意义。本文主要根据文献[18]介绍的相关准则,对MPTL 系统中的流动和传热特性进行重力效应影响分析。
为研究重力效应对流动的影响,分别计算Bond数和气相表观Froude 数:
式中:ρ、g、d、σ 和U 分别为密度、重力加速度、管路内径、表面张力系数和特征速度;USG为气相表观速度;下标L 和G 分别表示液相和气相。
将系统的参数代入到式(4)和式(5)中,可以得到Bo = 2.64,FrSG= 2.63~4.6,2 个数值满足式(6)和式(7)所述的主导作用力的重力无关性判据:
重力效应对系统沸腾换热的影响主要包括:①垂直于预热器和蒸发器表面的重力分量引起的动力学不稳定性;②波长过大阻止液体与预热器和蒸发器内壁面的接触。
对于影响①,当界面波长满足式(8)所述的准则时,则说明该特性与重力是无关的,即

式中:L 为蒸发器内管路长度。通过代入数值到式(9)中,得到左边项的数值在1 940~10 215 之间,式(9)成立。
因此,本文搭建系统的流动和传热特性均满足重力无关性准则,系统的设计参数可以满足航天遥感器在轨应用需求。
2 试验结果分析
2.1 工况1 结果分析
图11 为MPTL 首次启动时储液器上测点变化曲线。试验前,MPTL 各组件温度长时间放置于真空低温环境下,各组件的温度在-5.0~0 ℃之间。试验开始后,将储液器气相侧壁面的温度提升到20.0 ℃,储液器的升温速率为1.2 ℃/min,与此同时,液相侧壁面和出口的温度分别上升至4.9 ℃和0.1 ℃。5 586 s后,机械泵开机,在机械泵的作用下,辐射冷凝器中过冷液体开始循环,使得储液器出口温度开始降低。6 130 s 后,预热器开启。9 646 s 后,将辐射冷凝器的控温点从-30.0 ℃调高至-25.0 ℃,随后储液器出口温度升高至-2.0 ℃。10 591 s 后,储液器出口温度开始出现振荡,波动范围在-6.0~-2.1 ℃之间,与此同时,储液器气相侧壁和蒸发器各处的温度也出现了小幅温度振荡,温度振荡现象的出现意味着MPTL 系统在预热器下游达到了两相状态,两相态的出现引起了储液器与主回路工质的交换,导致温度振荡现象。温度振荡过程持续约1 600 s,随后储液器气相侧壁面温度稳定在20 ℃附近。
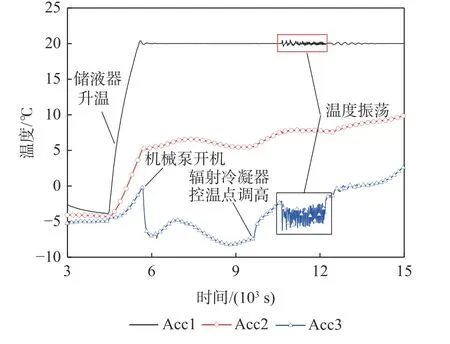
图11 MPTL 启动时储液器上测点温度变化曲线Fig.11 Temperature variation in measuring points of accumulator during MPTL start up
图12 和图13 为系统绝对压力和根据压力拟合得到温度值的变化曲线。系统绝对压力的变化范围为0.42~0.85 MPa,压力增加、振荡的时刻与储液器气相侧壁面温度发生相应变化过程的时刻相同,意味着对MPTL 系统进行的操作同步影响了系统的压力和储液器内气相的温度。饱和温度压力和数据来源于NIST 标准数据库[19]。饱和温度和压力的拟合公式为
式中:Tsat为饱和温度;Psat为饱和压力。
通过将压力数据代入到式(10)中得到的温度(计算温度)变化数据,并将该温度与实测温度(储液器气相侧壁面温度)对比,发现变化趋势一致性较好,表明储液器内饱和温度和压力是由其内部的气相所决定的。受加热功率和热阻的影响,两者的温差在0.2~0.3 ℃之间。图12 和图13 中温度和压力的振荡现象在2.3 节中进一步解释。
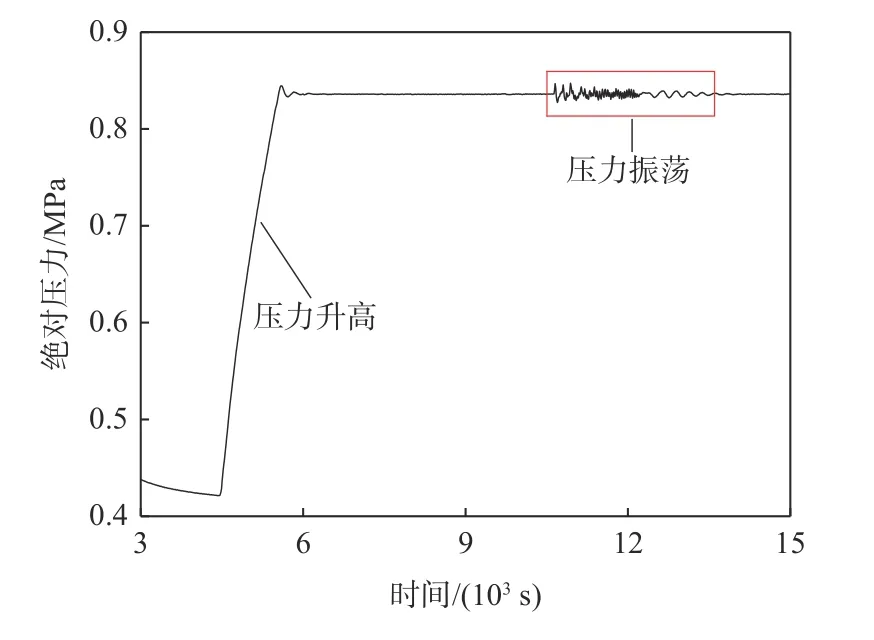
图12 MPTL 启动时系统绝对压力变化曲线Fig.12 Variations in absolute system pressure during MPTL start up
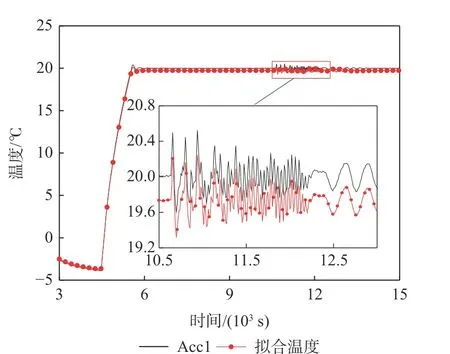
图13 MPTL 启动时储液器气相温度与压力拟合温度对比Fig.13 Comparison between vapor temperature and fitting temperature from saturated pressure during MPTL start up
图14 和图15 为模拟热源开关机时蒸发器和换热器测点温度的变化曲线。从图14 中可以看出,模拟热源关机时,9 个蒸发器的温度在21.5~22.5 ℃之间,模拟热源开机后,蒸发器的温度升高,温度在22.0~23.0 ℃之间。蒸发器温度升高主要受到热阻的影响。模拟热源开关机过程中,储液器气相温度保持稳定,从而维持了蒸发器温度的稳定。此外,蒸发器的温度比储液器气相的温度高1.5~3 ℃,主要是受储液器与蒸发器的压差影响。从图15 可以看出,通过在MPTL 中设置换热器可以将冷端入口的温度提高7~12 ℃。此外,换热器冷端入口处的温度受外热流影响而发生波动,但蒸发器温度并未发生波动,这是由于蒸发器内工质为两相态,其温度主要是由储液器所决定的,储液器温度保持稳定,蒸发器温度即可保持稳定,储液器为模拟热源的工作提供了稳定的边界条件。

图14 模拟热源开关机时蒸发器测点温度变化曲线Fig.14 Temperature variations in measuring points of evaporators during heat loads start up and power off

图15 模拟热源开关机时换热器测点温度变化曲线Fig.15 Temperature variations in measure points of heatexchanger during heat loads start up and power off
2.2 工况2 结果分析
图16 和图17 为工况2 储液器和蒸发器测点温度变化曲线。从图16 可以看出,系统达到两相态后,储液器气相壁面测点温度均出现小幅振荡,储液器出口管路壁面温度快速下降,意味着MPTL 主回路的冷工质进入了储液器中。图17 中,储液器及主回路温度在14~16 ℃之间,首先将控温点提升至20 ℃,随后启动机械泵,再开启预热器,系统到达两相态后再将储液器降温,通过内部毛细管路与储液器内工质的换热作用,控温点降温至10 ℃附近,并保持稳定。蒸发器与储液器温度变化保持一致,蒸发器温度维持在11.3~12.7 ℃。
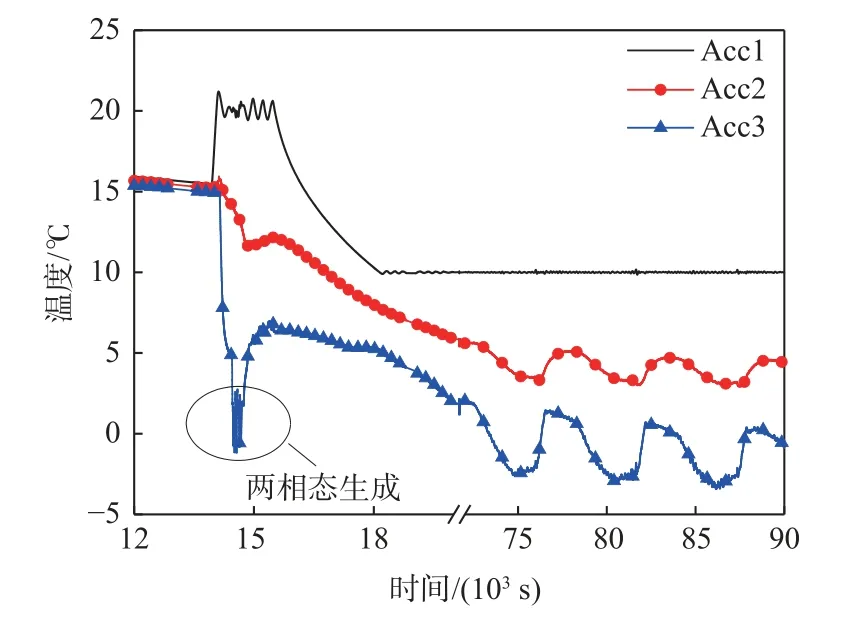
图16 工况2 储液器测点温度变化曲线Fig.16 Temperature variations in measuring points of accumulator for test condition 2

图17 工况2 蒸发器测点温度变化曲线Fig.17 Temperature variations in measuring points of evaporators for test condition 2
2.3 系统振荡过程分析
图18~图20 为工况1 中两相段生成后,储液器测点温度、系统压力和储液器控温功率的变化曲线。从图18 中可以看出,储液器气相侧壁面温度波动过程与储液器出口温度的变化趋势相反,即储液器气相侧壁面温度升高时,出口温度下降。这是由于两相段生成后,MPTL 主回路内多余的工质被推入到了储液器中,储液器出口温度下降,气相空间被快速压缩,气相温度和压力随之升高;反之,储液器内工质流入到主回路中时,储液器出口温度升高,气相空间膨胀,气相温度和压力下降。为了维持储液器的控温点,储液器加载的功率也会因此而发生变化(见图20),加载功率变化导致了MPTL 主回路与储液器工质交换过程(即温度和压力振荡过程)维持了一段时间。从图18~图20 可以发现,振荡幅度逐渐减小,并在约12 200 s 后,振荡过程停止,MPTL 系统控温点趋于稳定。

图18 两相段生成后储液器测点温度变化趋势Fig.18 Temperature variations in measuring points of accumulator after two phase generation

图19 两相段生成后系统压力变化趋势Fig.19 Pressure variations of system after two phase generation
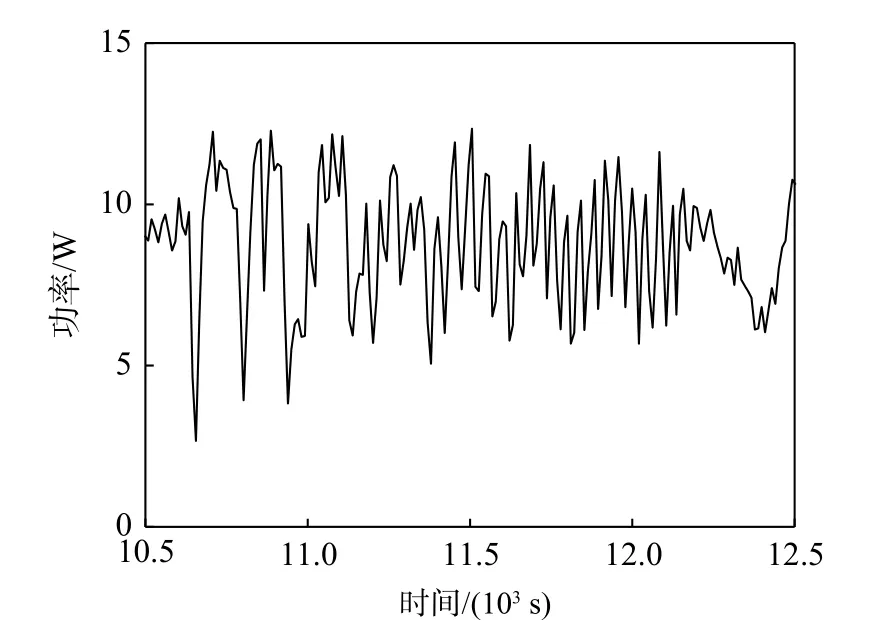
图20 两相段生成后储液器功率变化趋势Fig.20 Variations in power applied on accumulator after two phase generation
图21 给出了MPTL 系统压力降脉动简化模型。单相条件下,主回路与储液器无工质交换过程,储液器前流量 m˙1和 离心泵后流量 m˙2满足:
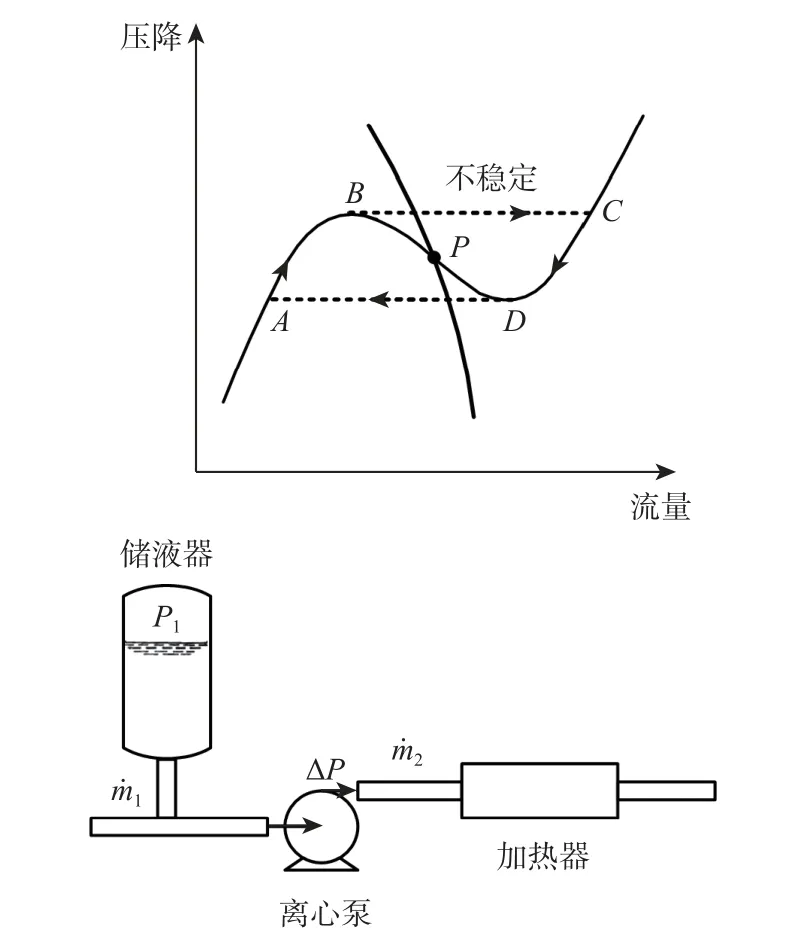
图21 MPTL 系统压力降脉动简化模型Fig.21 Schematic diagram of pressure-drop oscillations for MPTL system
MPTL 系统特性曲线与机械泵特性曲线的交汇点为P。系统压降ΔP 和系统流量的关系式为
式中:Kt为阻力系数。当预热器生成两相后,系统主回路中的气相体积逐渐增加,导致 m˙1增 加,且m˙1>m˙2,回 路 内多余的流量 (m˙1- m˙2)将 流 入 储 液 器 中。由于两相段的增加,式(12)中阻力系数将增加,m˙2将减少,系统主回路的工作点将沿着MPTL 系统特性曲线移动至压降最大值B 点。如果压降增加,工作点将漂移到C 点,即通过提供更大的流量来维持压力的增加。而在C 处,由于进入预热器的流量m˙2突然增大,超过了系统流量 m˙1,两相段减少,储液器内多余的流量 (m˙2- m˙1)将流入主回路中,系统工作点将再次移动至最小值D。如果压降减少,工作点将漂移到A 点。由于 m˙2比 m˙1小,系统工作点将沿正斜率单相气区增大至B 点,开始新一轮的循环。因此,对负斜率两相区内部任何点的扰动都会产生上述流量在ABCDA 区域内循环。当储液器与主回路完成工质交换过程后,系统趋于稳定,振荡停止。
3 结 论
本文在真空条件下对航天遥感器用MPTL 系统进行了试验测试,主要考察了高真空与空间外热流条件下系统的散热与控温能力。MPTL 系统使用了具有被动冷却能力的两相控温型储液器,无需额外的制冷功率即可实现储液器的精确控温。通过温度和压力等数据,研究了热真空条件下MPTL系统在不同工况时的工作性能及储液器与主回路之间的传热传质过程。主要结论如下:
1)通过对不同系统控温点的测试,验证了MPTL系统可以根据需要进行控温点的调整,外热流变化与热源开关均对蒸发器温度影响较小,系统在这2 种工况下均能维持稳定。MPTL 系统灵活性较高,可以满足在轨不同工作模式下的使用需求。
2)通过回流过冷液与储液器中液相冷量的交换,保证了储液器冷量的供应,实现了被动冷却能力。储液器内气相温度与系统绝对压力变化趋势保持较高的一致性,表明两相控温型储液器内的饱和状态点是由其内部的气相所决定的。
3)MPTL 系统主回路的相态由液相到气液两相态转变时,系统出现了不稳定现象,主要体现在储液器内压力和温度、蒸发器温度出现振荡现象。MPTL系统出现的不稳定特性为压力降脉动,其主要是由储液器与主回路进行工质交换所引起的。
通过本文的研究表明,MPTL 系统具有控温点可调、稳定性好、自适应能力强等特点,可以满足航天遥感器高稳定度的控温需求,进而可以保证遥感器的高精度成像。
猜你喜欢
能源与环境(2023年5期)2023-11-16 01:33:56
橡塑技术与装备(2021年11期)2021-06-16 05:43:14
广东工业大学学报(2020年3期)2020-06-11 07:46:00
同济大学学报(自然科学版)(2018年8期)2018-09-11 08:27:44
制冷技术(2016年3期)2016-12-01 06:53:25
山西建筑(2016年25期)2016-09-28 09:59:00
机械工程师(2014年3期)2014-11-22 02:11:58
机电信息(2014年20期)2014-02-27 15:53:23
机电信息(2014年17期)2014-02-27 15:53:00
机电信息(2014年5期)2014-02-27 15:51:47