
一类中立型奇异马尔科夫跳变系统的状态反馈控制器问题研究
2023-03-30 07:30龙少华
科学技术创新 2023年5期
龙少华,黄 嵋
(重庆理工大学 理学院,重庆)
引言
在实际系统中有一类非常重要的系统,它含有多个子系统,每个子系统大多是一个中立型奇异系统。子系统之间的切换规律受控于一个马尔科夫过程,我们把这样的系统称为中立型奇异马尔科夫跳变系统。中立型奇异马尔科夫跳变系统有非常广泛的应用,它可以用来描述一些机械系统、电路系统以及经济系统的动力学模型。近年来,中立型奇异马尔科夫跳变系统受到了越来越多的研究者的关注。越来越多的有关中立型奇异马尔科夫跳变系统的研究成果被发表出来[1-4]。然而,有关中立型奇异马尔科夫跳变系统的状态反馈控制器设计问题的研究还不完善,本文将对奇异矩阵Er(t)与模态有关的中立型奇异马尔科夫跳变系统的状态反馈控制器设计问题进行研究。我们首先将利用线性矩阵不等式方法和李雅普诺夫泛函方法给出使得所研究系统容许的充分条件,此外,我们将进一步给出状态反馈控制器的设计方法,最后,我们将用例子来验证我们所得的结论。
1 准备知识
在本文中,我们假定{s(t),t 0}取值于有限集合S={1,2,...,M}。另外,在本文中,{s(t),t ≥0}代表一个右连续的马尔科夫过程。此外,对于马尔科夫过程{s(t),t ≥0},我们假定从模态n 到模态m 的转移概率为:

本文的目的是设计一个如下形式的状态反馈控制器:
其中Kr(t)是未知的n×n 矩阵。我们设计这个状态反馈控制器的目的是使得闭环系统Er(t)y′(t)=(Ar(t)+ Dr(t)Kr(t))y(t)+Br(t)y(t-g)+Cr(t)y′(t-g)容许。
2 主要结论
不失一般性,我们假定Ej=diag(Ej1,0), 其中Ej1表示aj阶单位矩阵,diag(Ej1,0)表示主对角线的子块为矩阵Ej1和0 的分块对角矩阵。
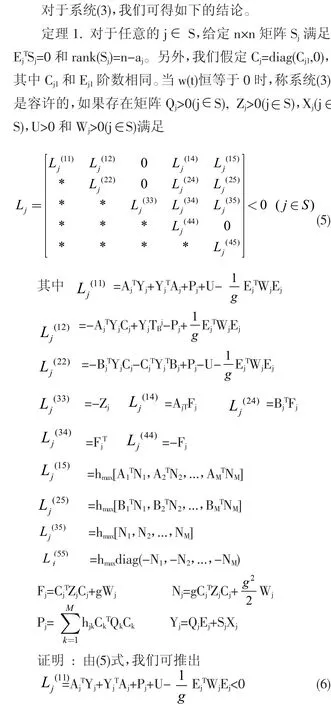



那么系统(3)是容许的,并且状态反馈控制器可设计为Kj=Dj-1Yj-TKbj。
3 算例
假定系统(3)中的参数如下:

猜你喜欢
舰船科学技术(2022年21期)2022-12-12
九江学院学报(自然科学版)(2022年2期)2022-07-02
有色金属(矿山部分)(2021年4期)2021-08-30
铁道通信信号(2020年3期)2020-09-21
资源导刊(信息化测绘)(2020年5期)2020-06-22
铁道通信信号(2018年8期)2018-11-10
广西科技大学学报(2016年1期)2016-06-22
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10
湖北经济学院学报·人文社科版(2015年8期)2015-12-29
上海电机学院学报(2015年4期)2015-02-28
