基于航拍视频构建风险指数的交织区拥堵识别方法
2023-03-29 02:50李熙莹梁靖茹张伟斌郝腾龙陈丽娟
铁道科学与工程学报 2023年2期
李熙莹 ,梁靖茹 ,张伟斌,郝腾龙 ,陈丽娟
(1. 中山大学 智能工程学院,广东 深圳 518107;2. 广东省智能交通系统重点实验室,广东 深圳 518107;3. 南京理工大学 电子工程与光电技术学院,江苏 南京 210094)
城市快速路承担了大量机动车交通需求,其中交织区路段中大量的车辆合流与分流行为导致车辆间互相干扰、频繁变道,相比较于基本路段更容易形成通行瓶颈,造成匝道或主线车流的交通拥堵及冲突事故,增加交通出行成本和安全风险[1]。如果能获取完整的微观交通数据,并基于交织区拥堵形成机理实时识别拥堵特征,则能够实现预警交织区拥堵,支撑城市重点瓶颈路段的拥堵控制和实时诱导。目前应用最为广泛的交通数据获取方法是监控视频识别[2],通过监控视频提取流量、速度等信息以检测交通流状态,但受限于其较低的拍摄角度和较小的拍摄范围,难以提取完整且精细的个体车辆轨迹。相比之下,无人机航拍视频能够采集较完整路段范围内的精细车辆轨迹数据,KE 等[3]提出了基于车辆检测分类器及交通流理论的无人机视频交通流参数估计方法,被证实远远优于通用监控视频的估计结果。无人机航拍的大范围及移动性使得其在交通运行风险的巡逻、监测上有了新的发展空间,KARADUMAN 等[4]利用空中道路视频数据让无人机对道路进行学习识别,从而为其规划路径以达到监测道路的目的,这表明利用无人机进行交通巡航与风险预警具备很大前景。在常规的路段拥堵识别中,大部分研究利用车流密度[5-6]、平均速度[5,7]、空间占有率[1]等基本交通流参数对交通状态进行判断,如RIBEIRO等[5]通过检测车流密度、流量和速度检测交通拥堵现象,KE 等[8]将道路占有率加入了常用的道路拥堵检测模型中。苏俊杰等[9]选取流量、时间占有率、速度参数进行投影寻踪聚类分析,判断交织区交通拥堵状态。这些方法均通过计算全局或路段的交通流参数识别是否发生拥堵。相比于常规路段,交织区的交通流常呈现高幅的交通振荡[10]和高频的变道交织行为,使得其在拥堵形成前受到交织流扰动,呈现出车速波动、局部车道缓行、交织流冲突等不稳定形态。仅采用交通流基本宏观参数的方法难以表征这种局部不稳定交织流。KUSUMA 等[11]研究表明交织区中30%的交通量都出现至少一次变道行为。陈亮等[12]基于元胞自动机对快速路交织区拥堵仿真重现,结果表明车辆驶出对系统交通流干扰最为严重。WAN等 利用无人机捕捉快速路匝道附近瓶颈的拥堵演变,对速度波动和换道影响进行建模量化。从这些研究可知,车流不稳定和相互干扰是造成交织区路段中拥堵形成的重要因素,采用全局宏观交通流参数度量交织区拥堵风险可能造成无法识别局部拥堵、无法短时预估等问题,还需要结合微观车辆行为参数研究精准的交织区拥堵风险识别方法。本文基于无人机航拍提取车辆精细轨迹,考虑了造成车流不稳定的速度波动、变道冲突等车辆微观运动信息,通过建立速度扰动与变道交织扰动的感知模型,构建交织区拥堵风险指数,为采用无人机、高空视频预警重点路段的短时、局部拥堵提供技术方法。
1 方法
1.1 原理与框架
由于交织区受到匝道紊流影响,交通流之间的干扰对整体交通状态的影响大大增加[14]。如图1为某交织区的实际速度、流量数据绘制的散点基本图,由于交织区车流内部和外部扰动严重,拥堵流(-V>Vm,-V为平均速度,Vm为临界速度)数据点受扰动影响大、不稳定性高,数据点并不完全按照交通基本图理论[15]分布。

图1 某交织区实际数据速度-流量散点基本图Fig. 1 Basic diagram of speed-flow scatter through actual data in a weaving section
在这种情况下,采用宏观交通流参数难以准确识别拥堵程度,应当将车流不稳定性考虑其中。因此,本文在平均速度-V的基础上,建立交织区车流车速扰动和变道交织扰动2类不稳定因素的感知模型,从而形成精准的拥堵识别方法。如图2为本文方法框架,首先通过无人机航拍视频识别与跟踪车辆构建轨迹数据;然后建立多维度的车流扰动计算方法;最后构建具有场景一致性的拥堵风险指数实现交织区拥堵识别。
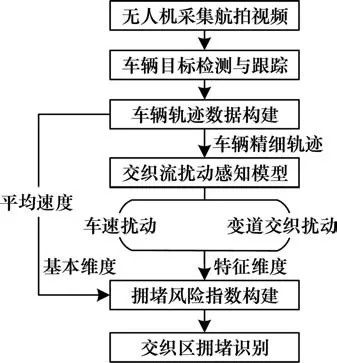
图2 方法框架Fig. 2 Method framework
1.2 无人机航拍车辆轨迹提取
基于计算机视觉、深度卷积神经网络的目标检测方法,能够实现对车辆位置及类别的精准识别。YOLO 系列[16]算法将定位与分类网络一体化,达到实时的检测速度,是当前实际应用中效果最好的一类目标检测算法。其中2020 年新公开的YOLOv4 算法[16]进一步优化了网络结构及输入策略,在高准确度的同时保持了实时检测速度。因此,采用YOLOv4 作为航拍视频中车辆检测的基础算法。
航拍视频中的车辆目标尺寸小、单一俯视角度,与常用车辆数据集外观相差较大,原始权重的YOLOv4 检测算法不能很好检测出车辆目标。为了更好地表达这类小目标特征,采用同样场景的航拍数据集VisDrone2019[17]进行网络训练。该数据集标注目标有机动车、非机动车和行人共10 种类别,包含本文主要关注汽车(car)、公共汽车(bus)和卡车(truck)3 类机动车。经过重新训练,得到新的小目标检测网络权重模型。如表1,在本文的航拍场景中测试结果显示:1) 3类机动车检测的mAP(Mean Average Precision,各类别AP 的平均值)值达到86.19%,其中数量最多的car 类型的AP(Average Precision,Precision-Recall 曲线与坐标轴所覆盖面积)值达到95.49%,目标检测公开数据集中,MS COCO 数据集排行榜最高mAP 为58.8%,PASCAL VOC2012 数据集排行榜最高mAP 为86.5%,可见本文检测效果达到较高水平;2) 车辆检测的误检率(误检数占检出正类数的比例)和少检率(少检数占真值数的比例)仅为4.54%和4.99%,运算速度达到27 fps(Frame per Second),完全能够满足交通研究中对车辆信息的需求。

表1 车辆检测测试结果Table 1 Test result of vehicle detection
无人机拍摄可能存在一定的成像抖动以及视场角畸变情况。本研究采用专业人员在100 m 以上高度位置、固定拍摄的稳定视频数据,以尽量减少这些问题的干扰。当无人机固定拍摄时,其内置的防抖算法能够保持稳定视角。但为了保证提取到的车辆轨迹精细准确,还布设特征明显的黑白棋盘格标定物作为微调参照物。利用OpenCV中的模板匹配函数提取所有标定物位置随时间变化的信息,即可以标定物位置来校正车辆的实时位置。
检测到车辆目标后,需要进一步跟踪获取车辆轨迹。经典的卡尔曼滤波器能够基于时序上车辆位置观测值进行未来位置的预测,实时估计车辆轨迹。为了提高该预测的准确性,DeepSORT 算法[18]的运动预测环节加入视觉信息[19],以区分不同车辆外观特征减少误判及车辆ID 跳变。本文采用该算法提取了车辆外观特征,与运动估计协同度量轨迹与检测框之间的相似度,最后通过匈牙利匹配输出带有时间、位置、大小及类型属性的精细车辆轨迹。经过跟踪矫正的车辆位置及ID 检测结果如图3 所示,目标的包围框能够代表车辆形状,以支撑进一步的交通精细信息识别。

图3 航拍车辆识别结果示例Fig. 3 An example of aerial vehicle recognition results
1.3 交织流扰动感知模型
1.3.1 车速扰动计算
车速扰动度量同车道跟驰车队中的车速不稳定性,为了避免平均值对离散度产生影响,这里采用车辆个体间速度变异系数CV和加减速变异系数CA作为车速扰动指标。
首先,从车辆轨迹中提取车辆i在t时刻的瞬时速度与加速度,并计算交织区平均车速那么t时刻的车辆间速度变异系数CV(t)由每个车道中每个车辆的速度方差与车道平均速度计算得到:
式中:N为该路段车道数;表 示在l车道ID 为i的车辆在t时刻的行驶速度;为t时刻该车道平均行驶速度。
同样地,t时刻的车辆间加减速度变异系数CA(t)由每个车道中每个车辆的加速度方差与路段平均加速度计算得到:
1.3.2 变道交织扰动计算
变道交织扰动度量在分合流中不同车道交织流间的互相干扰程度,这里建立变道行为与交织冲突的识别方法,采用车辆变道频率RLC及交织冲突频率RIC作为变道交织扰动指标。
经典的交通冲突识别方法采用车辆碰撞时间(Time-to-Collision, TTC)进行判断,该方法更适用于跟驰中的前后车冲突,不适用于交织流的变道或侧向冲突。结合已有的一些交通冲突研究[20],本文采用契合俯拍视频的车辆安全空间方法识别交织流冲突。安全空间[21]是围绕车辆的一个缓冲区,空间的边界大小由周围车辆对目标车辆的运动影响决定。机动车的安全空间如图4所示,大约为一个长方形,其长轴安全距离为τCvC,其中τC为车辆平均反应时间,vC为车辆行驶速度;短轴长度为WC+dCy,其中WC为该车辆与其他车辆并排行驶时的横向间隙,dCx和dCy分别为该车辆沿x和y方向的物理尺寸。依据已有研究经验值,车辆平均反应时间τC为0.5 s,依据CHEN 等[20]通过大量数据修正的机动车安全间隙WC值为1.4 m。基于此类方法,本文将车辆安全空间在航拍视频中视作车辆外围的包围框当车辆的行驶方向θC不沿主车道方向时,计算该车辆与其他车辆的安全空间交并比及行驶方向角度差满足条件:1)则判断该车辆在交织流中与其他车辆发生冲突,其中θ*及Δθ*为阈值,依据实际场景数据决定。

图4 车辆安全空间示意图Fig. 4 Sketch map of vehicle safety space
基于以上交通冲突的判断,定义t时刻的车辆交织冲突频率RIC(t)量化表征交织流的冲突程度。RIC(t)为路段每百米单车道内因车流变道交织导致的交通冲突数:
式中:Lk为k路段总长度;Nk为k路段的总车道数;CIC(t)为t时刻因车流交织导致的交通冲突数。
车辆变道行为则结合车道线与车辆轨迹信息进行判别。具体地,先根据车道线信息与车辆位置判断车辆的实时所属车道,再结合车辆的轨迹方向改变获取变道行为的发生时间、位置及车辆ID。定义t时刻的变道频率RLC(t)量化表征交织区的变道行为频繁程度。RLC(t)为路段每百米单车道内正在变道的车辆数:
式中:nLC(t)为t时刻总变道车辆数。
1.4 交织区拥堵风险指数构建
能够满足不同场景、并具有场景一致性的状态表征方式,对于拥堵识别来说非常必要。本文通过参数归一化和权值计算,用多维交通参数构建交织区拥堵风险指数,以便于形成不同场景下对拥堵形成风险的一致性描述。对于不同维度的交通参数,需要根据参数计算结果采用不同的归一化方式。
非稳定流的平均速度拥有上下限值,采用极差法归一化数据。其上限Vmax可定为道路服务水平[15]中的非稳定流速度上限或交通基本图中的临界速度,其下限为0:
速度变异系数CV及加速度变异系数CA本身就是车辆速度与加速度离散程度的归一化量度,其值在0 至1 之间。因此可以直接使用CV与CA的加权值作为速度扰动:
其中αcv和αca为权值。冲突频率RLC与变道频率RIC则没有指标上限,不能使用线性极差法进行归一化,因此采用指数归一化构建变道交织扰动:
将3个维度的归一化分量赋予权重系数,构建用于表征交织区交通状态的拥堵风险指数:
式中:w1,w2和w3为权重系数,其和为1。
考虑到不同路段各维度数据分布不同,根据具体数据离散程度,采用熵值法[22]计算权重系数。首先将归一化的样本数据定义为Z={zij},其中zij为第j个维度的第i个样本值,且i=1,…,n,j=1,2,3;然后计算每一个维度的信息熵ej及信息熵冗余rj;每个维度权重系数的推荐值wj即为信息熵冗余与冗余和的比值,如公式(9)~(11)所示。
其中,pij为第j个维度下第i个样本值的比值;k=1/In(n)>0,以满足ej≥0。
根据以上方法即可构建以秒为时间精度的交织区拥堵风险指数S,该指数表征着由于车流不稳定而形成交织区拥堵的风险大小,由此实现拥堵的精准识别与短时预判。
2 实验结果与分析
2.1 实验数据
本文于广州市广州大桥交织区(图5)采集了2个早高峰共4 h 的无人机航拍视频,以进行实验分析。该路段为广州市的交通瓶颈路段,主干道为双向10 车道,设计车速为60 km/h,所拍摄路段共长约1 100 m,包括2 个出口匝道、2 个入口匝道,还存在5 车道变4 车道、高架分流等交织情况。使用DJI Phantom 4 型号无人机,于早高峰时段7 个路段的120 m 至130 m 高度固定位置进行拍摄,视频时长共约70 h。

图5 航拍广州大桥交织区Fig. 5 UAV video data of the weaving section of Guangzhou bridge
2.2 实验分析
2.2.1 权重系数计算
广州大桥场景中快速路设计速度为60 km/h,依据公路服务水平手册[15]中的非稳定流速度范围,Vmax设置为45 km/h。随机抽取所有数据中的4%共1 500 条数据,根据第1.4 节式(9)~(11)计算熵值以确定状态指标中的权重系数。由场景数据得到的推荐值如表3所示。
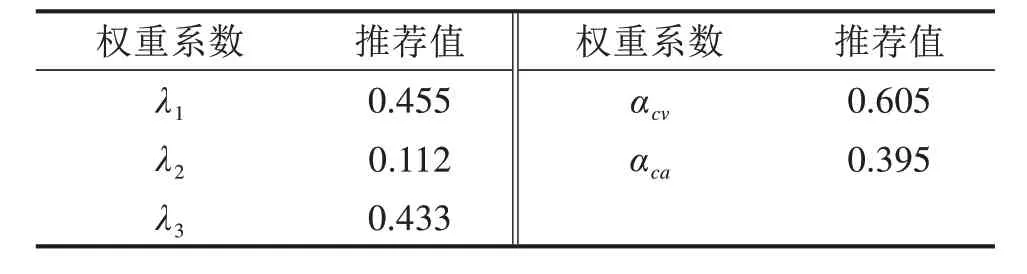
表3 案例推荐权重系数Table 3 Recommended weight coefficient for the case
2.2.2 拥堵风险指数可视化对比分析
以路段3(入口匝道1)和路段7(高架桥分流)为例分析对比交织区拥堵风险指数S与平均车速的拥堵识别结果,并以航拍视频和车道级车辆轨迹为真实对照,如图6所示。其中各车道车辆轨迹图横轴为时间(s),纵轴为位置(m)。
分析图6(a)可知:1) 8:55:35时,路段3的平均车速仅有7.247 km/h,S达到最高值0.781,实际中该时段路段上游发生公交事故,导致入口匝道前的车道4 与车道5 被占用,车辆合流受阻而形成严重拥堵。2) 2 min 后事故得到处理,8:57:47 时S降至0.434,平均车速虽然不高(14.708 km/h),但道路运行畅通,车辆轨迹稳定。3) 9:00:07 时,平均车速达到了21.580 km/h,S降至0.367,该时段的车辆轨迹比上一阶段更加快速稳定。4) 9:02:34时,车道1 与车道2 出现缓行与排队,导致平均速度仅有6.931 km/h,S达到0.713,道路形成局部车道拥堵。在路段3的15 min内,拥堵风险指数精准地判断出道路拥堵的形成,与平均车速的大趋势一致,但平均车速指标对短时拥堵的变化不够敏感。

图6 交织区拥堵风险指数可视化结果Fig. 6 Visualized results of the congestion risk index in weaving section
分析图6(b)可知:1) 8:54:25 时,快速路平均车速为16.427 km/h,处于较低车速值,而S仅为0.356,实际情况中该时段车速较为稳定且不必要的换道行为很少,车辆轨迹连续稳定,发生拥堵的风险较低。2) 8:59:08 时,S高达0.809,平均速度低至6.232 km/h,实际情况是辅路车道出现部分车道拥堵排队,强行变道与冲突增加,辅路逐渐形成局部拥堵。3) 约1 min 后,即8:59:55 时,S降至0.5 以下,交通状态出现了短时缓解,此时局部拥堵开始消散,速度波动幅度减缓,平均速度为9.562 km/h,仍为较低车速。4) 9:04:01时,辅路再次出现局部拥堵,且高架路车道车速稳定性降低,从车辆轨迹上看整个快速路各车道均出现不同程度的拥堵现象,S重新达到0.806。在路段7 的15 min 内,平均车速变化不大,但拥堵风险指数S能够精细识别交织区交通流稳定性的变化,并预先感知拥堵的形成。
2.2.3 拥堵风险指数多维度分析
进一步以10 min 为分析时间间隔,计算案例中的各交织路段平均速度,平均车速扰动(2)及平均变道交织扰动(3),对指数各维度进行分析,结果如表4所示。

表4 各交织路段分时段的拥堵风险指数多维度分析Table 4 Multi-dimensional analysis of congestion risk index in different weaving sections by time
对比分析可知:1) 从路段1 到路段7 可以看出,该交织区下游比上游拥堵严重,拥堵风险指数大趋势与平均速度一致,但同时受到2个方面交通流扰动量的影响。各路段的(2)与(3)相差较大,含匝道等特殊道路结构的路段扰动量相对较大(如路段5和路段7),其上下游也受到影响但相对较小(如路段1和路段4)。2) 指数的最高值在路段5的第1时段,达到0.764。该地点包括了1个入口匝道和1 个出口匝道,高频的分流与合流导致变道交织扰动较高(第1 时段为0.802),匝道局部位置易发生多车辆交织冲突而形成拥堵。3) 路段3 在8:55:00 至9:05:00 时段的变道交织扰动指数(0.456)比常态(约0.2~0.3)高出近一半,追溯原因发现该时段其下游发生机动车交通事故,导致2个车道车辆均需要变道绕行。4) 常态时段中,含入口匝道的路段3(约0.2~0.3)比含出口匝道路段2(约0.3~0.4)的拥堵风险指数更低,验证了出口匝道分流区会比入口匝道合流区引发更高频的车辆变道和交织冲突。5) 路段7 的车速扰动(2)则相对较高(第1 时段为0.528),平均车速较低(第2时段为9.240 km/h),分析可知该地点处在高架桥辅路分流的上游,6 车道快速路在此处分流为3 车道高架路与3 车道辅路,2 个方向上车流量的不平衡导致车辆部分车道缓行或排队。通过以上分析可以看出,除常见的全局拥堵外,本文方法还能够针对交织区场景感知到车道拥堵、匝道交通冲突及走走停停等形式的局部拥堵,更全面地表现不同因素诱发的交通拥堵。
2.3 拥堵识别结果
通过设置拥堵风险指数S的阈值,即可直观地判别拥堵状态。为了评价拥堵风险指数S应用于交织区拥堵识别的效果,将所采集的视频切分为30 s的视频片段并通过人工观测标注是否拥堵,包括全局拥堵、局部拥堵、部分车道缓行排队等。最后得到拥堵样本视频714 个,非拥堵样本视频548个,共1 263 个测试样本。采用平均速度[7]和车辆密度[6]2 种常用方法与拥堵风险指数进行对比测试,利用遍历最优的方法取得3种方法的阈值,其中平均速度的阈值为14.1 km/h,车辆密度的阈值为38 pcu/(ln·km),指数S的阈值为0.43。
采用精准率P,召回率R和F1 指标进行方法评价,其计算方法如下:
式中:TP为被正确识别的正样本数量;FP为被错误识别的正样本数量;FN为被错误识别的负样本数量。评价结果如表5和表6所示。

表5 交织区拥堵识别结果对比Table 5 Comparison of congestion recognition results in weaving section

表6 不同场路段拥堵识别的F1值对比Table 6 F1 values comparison of congestion recognition in different sections
表5为采用不同方法识别交织区拥堵的测试结果。从表中可以看出,在交织区拥堵识别上本文方法的精准率和召回率均大于95%,且两者较为平衡,F1值达到97.85%。表6为7个不同路段下的测试效果。从表中可以看出,本文方法在不同路段中的F1值均高于其他方法,且都达到90%以上。在路段1中,通过平均速度和车辆密度识别拥堵的偏差明显,F1值仅能达到66.67%和78.40%,而本文方法能够达到90.20%。由于本文从交织区拥堵特征出发,将多种微观指标结合形成拥堵风险指数,本文方法的综合效果明显优于仅使用平均速度或车辆密度这类宏观参数的识别方法。
为了解析不同指标在交织区拥堵识别的表现,在表7 中分析了部分错误识别的测试样本及其结果。在实际场景测试中,平均车速的错误类型包括无法识别车道排队拥堵、事故拥堵、匝道拥堵和走走停停;车辆密度的错误类型包括无法识别车道排队拥堵、局部拥堵以及非拥堵识别为拥堵。分析原因可知:1) 部分车道排队或出现局部拥堵时,其他车道或区域的车速较快且车辆较少,导致路段仍然保持着较高的平均车速和较低的车辆密度,从而无法识别拥堵。测试场景中路段1的车道排队现象较多,因此平均速度与车辆密度的F1值较低,而拥堵风险指数能够通过车速扰动分量感知到拥堵。2) 在一些车辆较多但行驶稳定通畅的情况下,车辆密度指标容易将非拥堵时段判断为拥堵。3) 交织区常出现匝道口及其外侧车道拥堵的情况,该情况下主路其他车道车速受到影响较少,平均速度指标无法识别拥堵的发生,而拥堵风险指数能够感知匝道口车速的差异性和向外侧车道变道带来的扰动与冲突,从而识别拥堵。4) 部分区域车辆走走停停时,平均车速对拥堵的敏感度降低,相比之下拥堵风险指数中车速扰动分量大幅升高,实现拥堵的识别。这些结果说明了综合微观指标构建拥堵风险指数的策略,能够更好地适应不同结构、不断变化的交织区场景,具有极高的拥堵识别准确性和泛化性。

表7 部分测试样本及识别结果分析Table 7 Analysis for parts of test samples and identification results
3 结论
1) 基于无人机航拍数据构建的车辆轨迹mAP值高达86.19%且完整连续,该数据提取方法能够支持大量微观交通研究。
2) 广州大桥场景实验分析表明:拥堵风险指数S对交织流的稳定性变化更加敏感,该案例中S超过0.6 的情况下车流不稳定性强、形成交通拥堵瓶颈的概率大;与单一维度的平均速度指标相比,考虑交通流不稳定性的拥堵风险识别方法能够从S(2)分量识别出局部车道缓行排队的拥堵形态,从S(3)分量识别出匝道排队、事故绕行等局部拥堵,在拥堵瓶颈形成之前即感知状态变化的风险。
3) 在拥堵识别评价中,本文方法在交织区各路段视频中F1 值均大于90%,拥堵识别精准度和召回率均大于95%,在该任务中的准确性和泛用性均优于平均车速和车辆密度的经典方法,在实际测试中能够识别出宏观指标易忽略的车道排队、匝道拥堵、走走停停等拥堵类型。
4) 基于本文的理论方法,后续研究可面向城市中多条快速路交织区进行数据采集和案例研究,在大量实际数据中进一步完善理论方案并探究交织区拥堵形成机理。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
美食(2022年2期)2022-04-19
中国交通信息化(2020年4期)2021-01-14
中学生数理化·八年级物理人教版(2020年9期)2020-11-16
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
女报(2019年3期)2019-09-10
成都信息工程大学学报(2018年6期)2018-03-21
中国交通信息化(2018年11期)2018-03-01