
煤炭智能运输车PLC控制系统的设计
2023-03-29 09:38王程陈亚东
时代汽车 2023年7期
王程 陈亚东
1.辽宁铁法能源有限责任公司 辽宁省铁岭市 112799 2.铁法煤业(集团)有限责任公司 辽宁省铁岭市 112700
随着人工智能技术的快速发展,物流运输行业也越来与智能化和自动化,在煤炭运输领域,煤炭智能运输车是现代煤炭技术发展的核心之一。各煤炭企业都需要成熟可靠的煤炭智能运输车。本文提出了一种通用的煤炭智能运输车系统方案。煤炭智能运输车的以可编程逻辑控制器为核心,通过模拟量输入模块采集数据给PLC,完成对所需模拟信号的采集,控制煤炭运输车行走的作业,系统由三元锂电池供电,具有绿色,节能,方便,稳定等特点。
1 智能运输车的控制系统方案
煤炭智能运输车系统结构框图如图1 所示。主要包括可编程逻辑控制器(PLC),数据采集传感器,控制对象以及人机界面HMI 等组成。其中模数数模转换模块采集输入的模拟信号并转换成和运行电机的速度控制模块的输出。位置编码器用于实用反馈当前转向角度数据,其数据与电池状态数据通过RS-485 通信方式与PLC 交换数据。
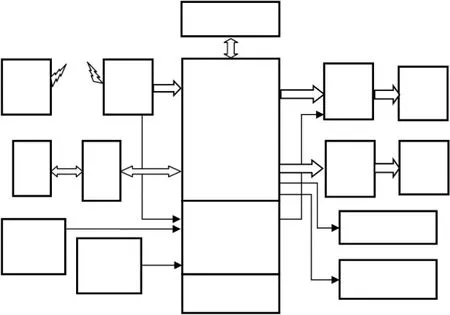
图1 系统框图
2 煤炭智能运输车的软件系统设计
2.1 控制程序的模块化设计
煤炭运输车的软件程序按功能划分为:通信、模拟量初始化、转换程序、制动程序、前进程序、变向程序、紧急故障报警程序等。通过分功能编写模块化设计,并进行分步调试,所有分步功能实现以后,进行专题联调联试。
2.2 I/O 端口分配
I/O 端口分配如图2 所示:

图2 I/O端口分配分配
2.3 可编程控制程序
①通信程序
图3 为读取编码器数据梯形图。S0 为读取角度数状态。D3O7 存放发送的指令数据00 03 00 04 00 01 84 4A。SEND为发送指令。图4 为电池状态数据读取梯形图。
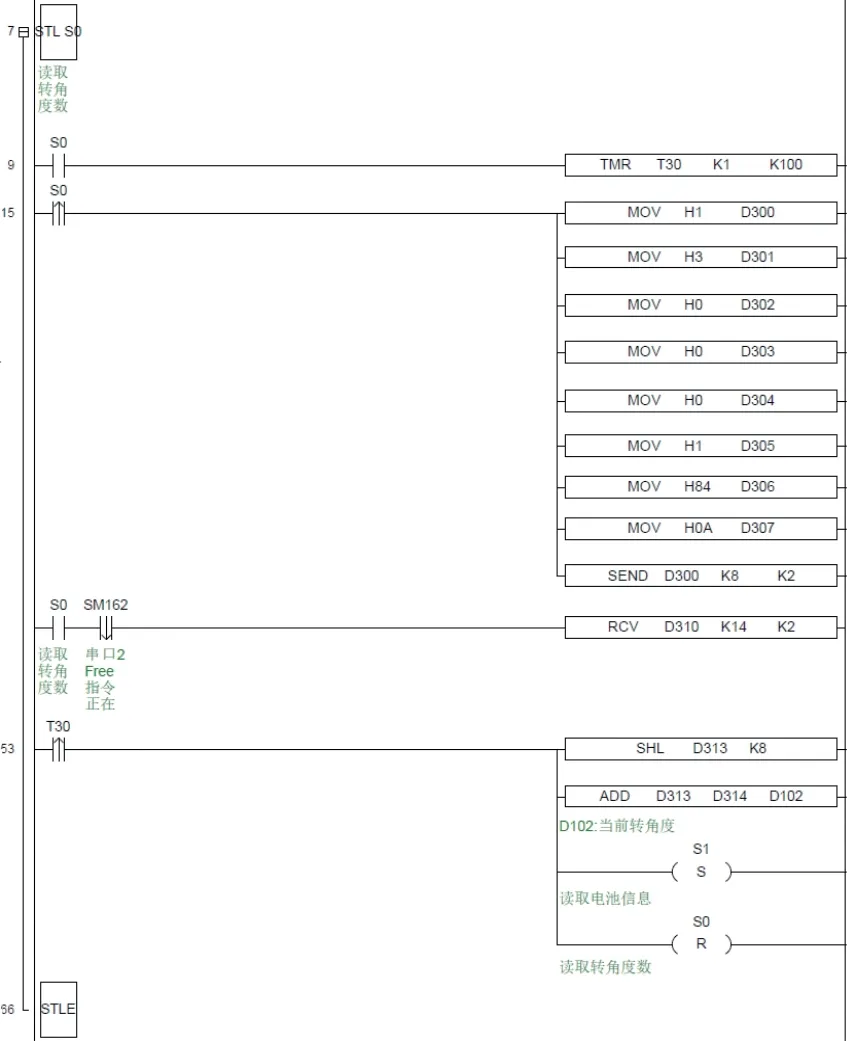
图3 读取编码器数据梯形图
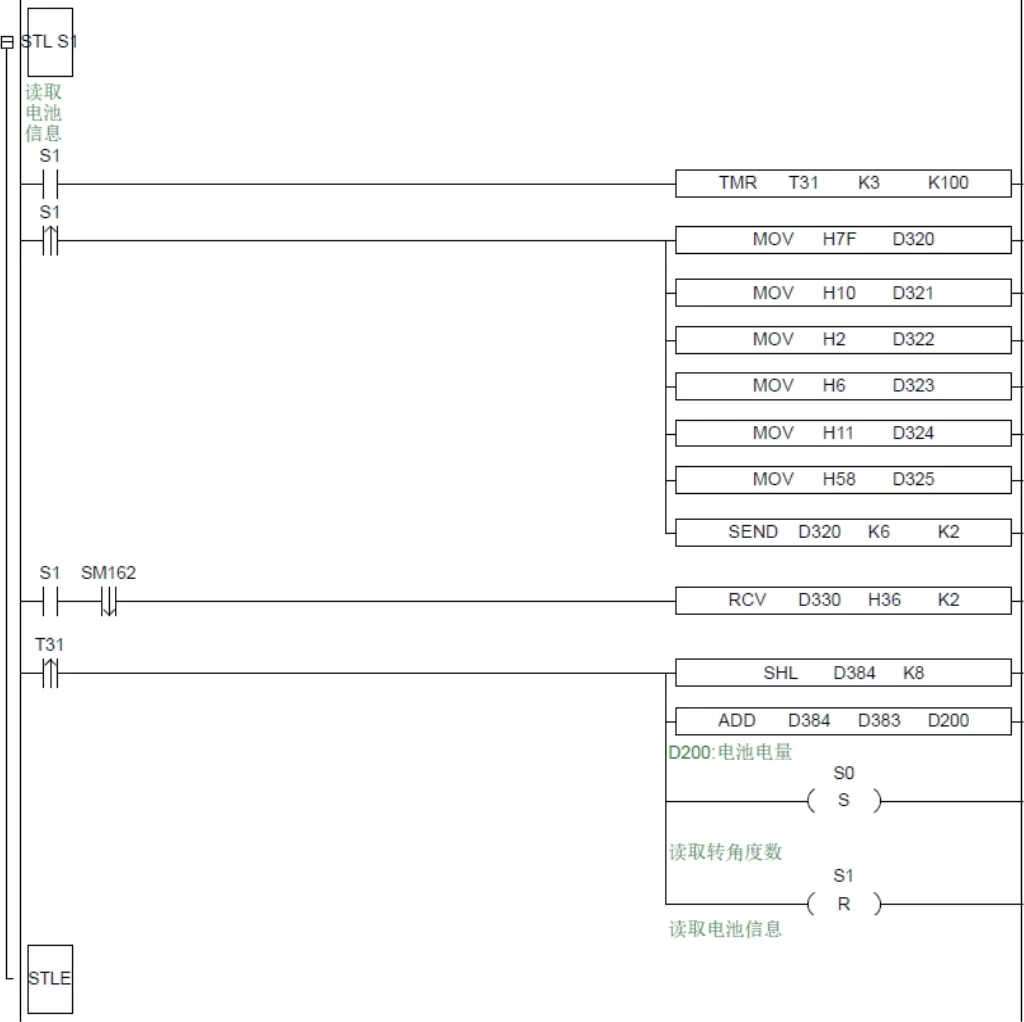
图4 读取电池状态数据梯形图
②模拟量复位程序及运算控制程序
模拟量复位程序及运算控制程序如图5 所示。模拟量AD 输入通道1 接制动油路变送器,模拟量AD 输入通道2 接角度传感器,相应数据存放于D30。
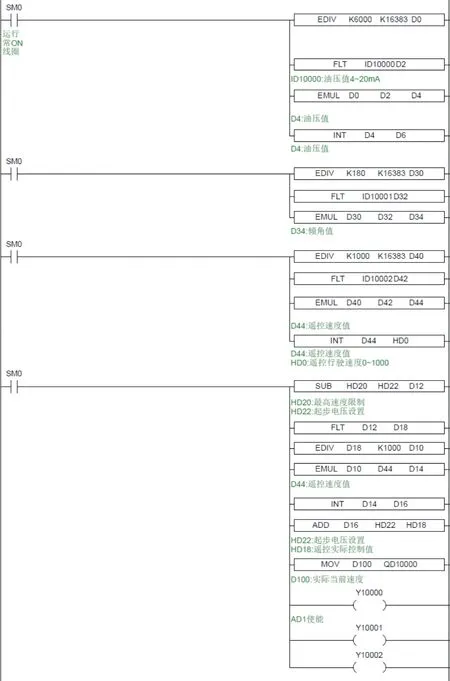
图5 模拟量复位程序及运算控制程序
③电机运行程序
电机运行程序分为向前和向后两部分程序。Y3 控制电机方向,用来判读向前还是向后,Y2 控制电机行走。图6 所示为向前的PLC 程序。图7 为智能煤炭车后退动作的控制程序。
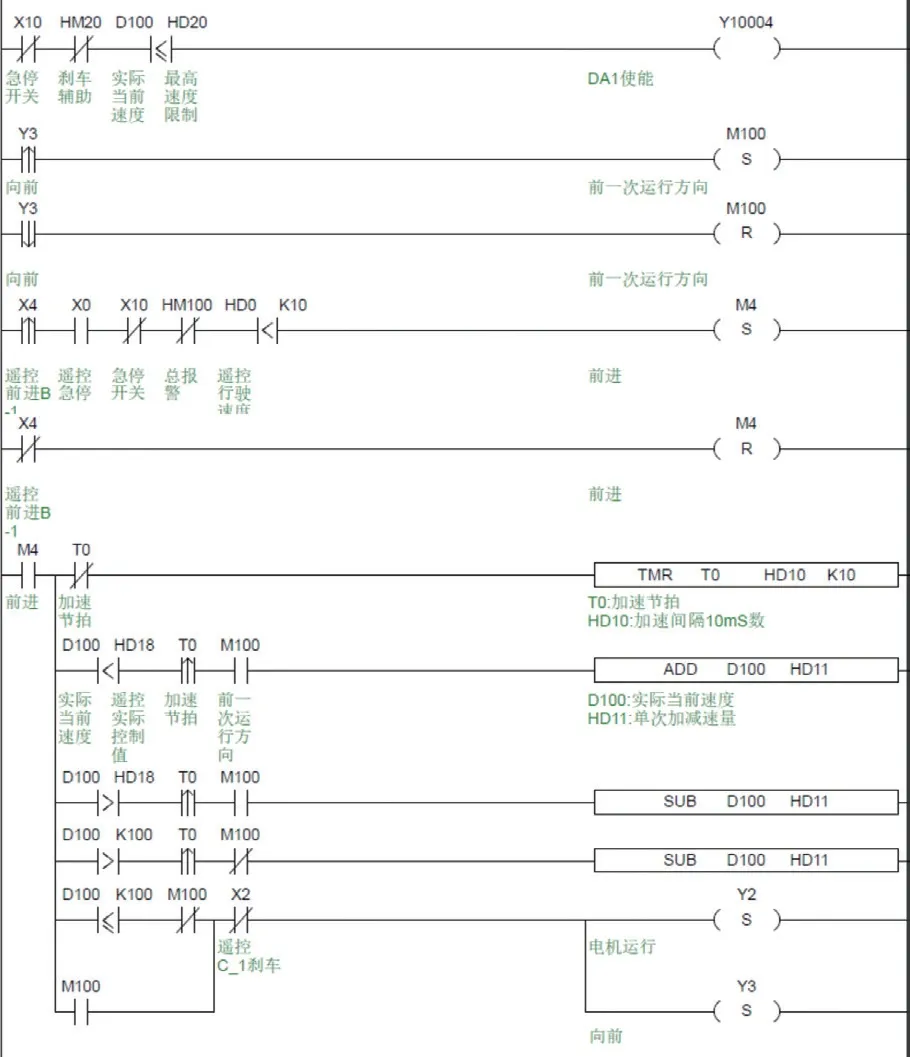
图6 前进控制程序
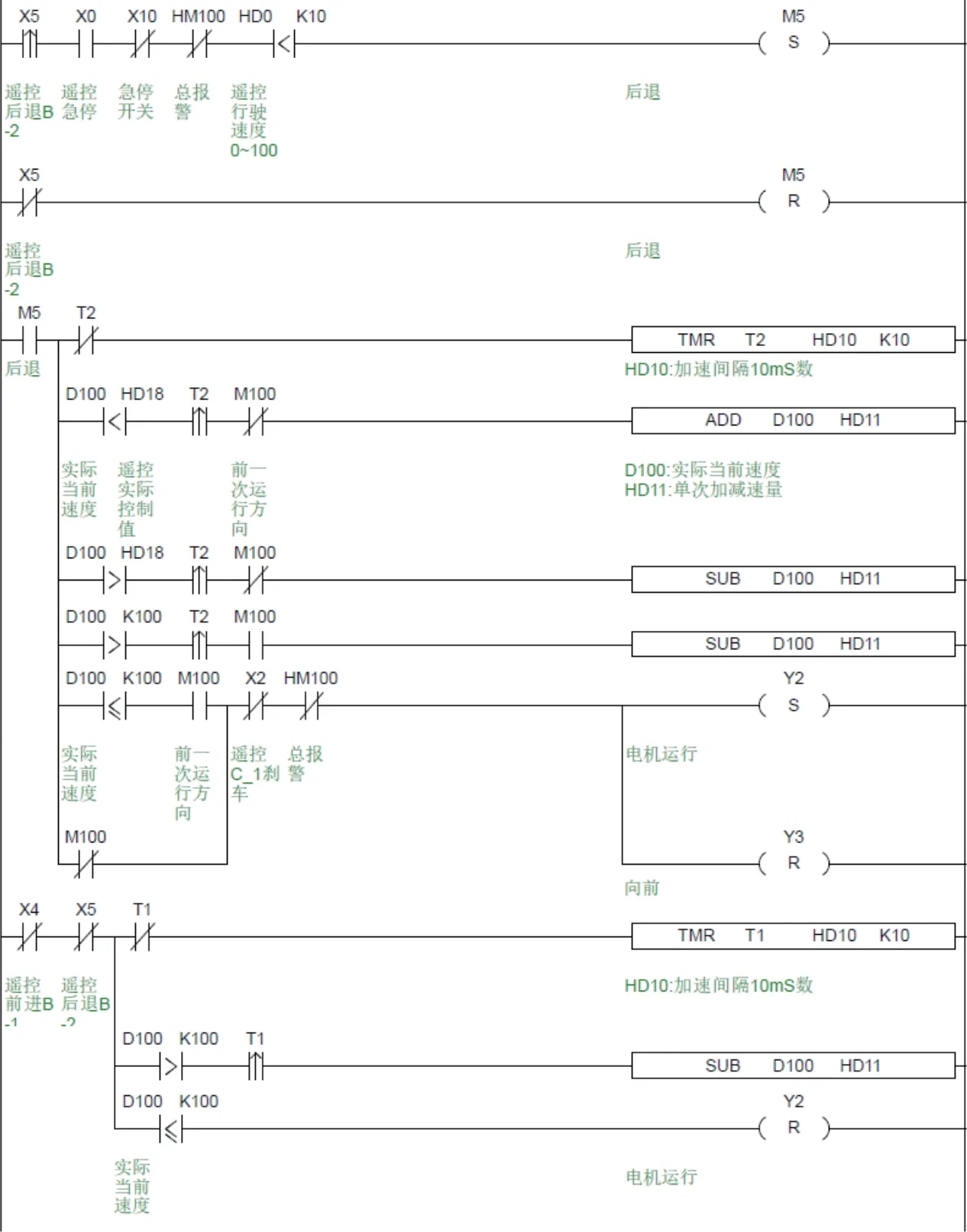
图7 后退控制程序
3 煤炭智能运输车软件调试
当煤炭智能运输车的硬件调试完成后,进行软件分步调试。分步调试全部完成后,进行系统联调联试。根据初定的控制要求检查是否实现功能,根据现象进行程序修改,直到控制要求正常。
4 结语
煤炭智能运输车控制系统通过安装调试,实现控制功能。可负载1.8 吨的情况下,完成向前、向后、左转、右转、制动等工作环节,保证系统工作正常。
猜你喜欢
装备制造技术(2020年4期)2020-12-25
电子制作(2019年15期)2019-08-27
成都工业学院学报(2017年2期)2017-06-28
电子制作(2016年15期)2017-01-15
专用汽车(2016年9期)2016-03-01
专用汽车(2016年4期)2016-03-01
制造技术与机床(2015年10期)2015-04-09
专用汽车(2015年1期)2015-03-01
武夷学院学报(2014年5期)2014-07-19
中国造纸(2014年1期)2014-03-01
