液压支架电液控制系统通信调度策略研究
2023-03-24 08:09王培恩霍鹏飞田慕琴郑文强宋单阳宋建成
煤炭工程 2023年2期
王培恩,霍鹏飞,田慕琴,郑文强,宋单阳,宋建成
(1.太原理工大学 矿用智能电器技术国家地方联合工程实验室,山西 太原 030024;2.太原理工大学 煤矿电气设备与智能控制山西省重点实验室,山西 太原 030024;3.山西科达自控股份有限公司,山西 太原 030024)
液压支架是综采工作面三机设备中的主要装备,液压支架电液控制系统作为液压支架控制的核心,其智能化程度是实现自动化采煤的关键所在[1-3]。根据采煤工艺的要求,对液压支架的控制不能在本架上进行,只能是邻架控制,或者是自动跟机控制,因此控制的实施都是基于通讯(架间或集中)的控制。而液压支架电液控制系统支架多、干扰大,实时性要求高,造成了通信的困难[4,5],所以其通信系统设计很大程度上影响着综采工作面设备协同工作能力,进而决定着综采工作面煤炭开采自动化程度。目前液压支架电液控制通信系统普遍由CAN总线构建,其多主通信方式及强抗干扰性解决了液压支架控制器通信中的很多致命问题,但由于CAN总线独特的“载波监听,多主掌控/冲突避免”(CSMA/CA)的通信模式[6,7],在多个节点发送消息造成总线碰撞时,低优先级节点的消息总是竞争失败造成低优先级节点的饥饿现象[8,9],造成数据延时发送或者丢失,对工作面的正常生产造成影响,甚至发生重大事故。《煤炭工业“十四五”科技发展指导意见》中提出要有序推进智能化煤矿建设,建立煤矿智能化技术规范和标准体系。液压支架电液控制系统的智能化发展进程中涌现了多种多样的智能化功能,如工作面校直找平、采煤机定位技术、矿压监测与顶板灾害预警、故障诊断与寿命周期管理等[10],这些智能化功能的数据传输都依托于液压支架电液控制通信系统,大量的数据使得CAN总线负载率极大提高,低优先级节点饥饿和总线竞争不公平现象愈发突出,数据传输的实时性和可靠性都受到极大影响[11],所以液压支架电液控制通信系统的调度策略设计十分必要。
文献[12]设计了一种基于双CAN总线的液压支架电液控制系统,但没有对CAN总线调度进行优化,总线公平性和实时性不够好,已无法满足不断推进的智能化矿山建设进程。文献[13]设计了液压支架动态优先级CAN通信协议,但采用的是发送失败一次优先级提高一级的简单方式,对改善液压支架电液控制系统总线实时性效果有限。文献[14]提出的速率单调(RM)算法来提高CAN消息实时性,但该算法效果有限。文献[15]提出的基于TTCAN的动态更新调度表的方式解决CAN总线的实时性问题,但TTCAN在恶劣环境下误码率高,与标准CAN协议不兼容,井下环境复杂,液压支架数量众多,不适合此方法。
针对现有液压支架电压控制通信系统实时性低,总线公平性差,低优先级节点数据一直发送不出去的饥饿现象,设计了一种基于CAN总线的液压支架电液控制通信系统动态调度策略,优化了液压支架电液控制通信系统的实时性和可靠性,改善了低优先级节点的饥饿现象,极大地提高了CAN总线的利用率,为推进智能化无人值守工作面建设打好基础。
1 液压支架电液控制通信系统分析
电液控制通信系统网络结构分为三层,工作面巷道计算机、端头控制器和支架控制器,他们之间通过总线进行相连[16]。每台液压支架配有一台支架控制器,一个工作面液压支架数量根据工作面长度不同,一般在100~200架之间,支架控制器之间由架间电缆串接,和端头控制器通过总线相连,具有动作执行、信息采集、故障报警等一系列重要功能,是控制支架实现各种功能的核心部件[17]。每台支架控制器还有多个传感器,用来监测支架动作执行程度及支架状态,每四到六个控制器由一个本安电源供电。除此之外由于支架控制器数量众多,需要增加中继才能实现全工作面可靠通信。液压支架电液控制通信系统结构如图1所示。
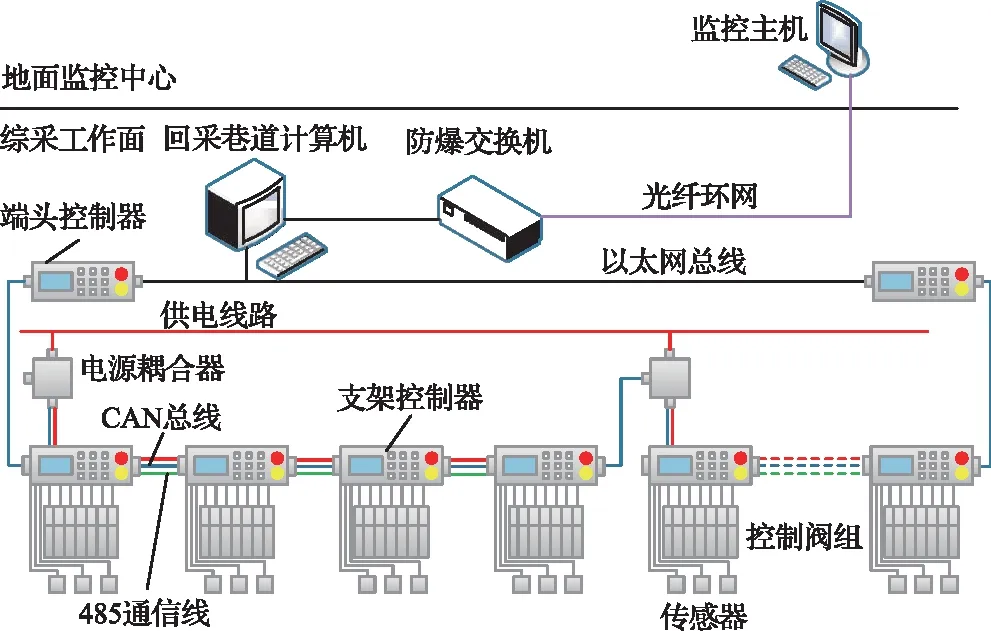
图1 液压支架电液控制通信系统结构
液压支架电液控制通信系统中的信息主要可以分为以下三个大类:
1)安全信息:急停闭锁及故障报警信息。安全信息需要及时传递给每一个节点,对实时性和可靠性要求极高,一旦出现消息冲突,要确保安全信息能够赢得总线竞争。
2)支架控制信息:包括邻架控制、成组控制、远程控制、集中控制等控制命令。其中邻架控制是液压支架人工操作时的控制方式,邻架控制实时性要求极高,一旦出现问题将会影响整个工作面的安全生产,且邻架控制距离近,这种情况更适合点对点直接通信,不适合总线竞争式通讯。成组控制与远程控制以及集中控制是通过总线通信来实现,属于比安全信息重要性低一级的信息。
3)智能化功能信息:包括传感器数据、自动校直信息、采煤机定位信息、状态信息以及剩余寿命信息等。这些信息为远程控制与自动化控制提供依据,是实现自动化无人值守工作面的关键所在。智能化功能用到了许多新技术,包括模糊逻辑控制、神经网络控制、专家系统、遗传算法、大数据分析等,由于其对计算能力的高要求,通常由端头控制器和工作面巷道计算机来实现。通过CAN总线将压力、倾角、位移传感器信息传输到工作面巷道计算机,数据分析和计算后将调直补偿量和自动化控制等信息传输回指定控制器实现智能化功能。但由于液压支架数量多,且智能化功能对传感器数据实时性要求高,数据传输量大,遇到总线冲突的概率更大,容易形成低优先级节点饥饿现象,传感器数据和采煤机定位信息等数据持续发送失败,没有数据的支持,端头和上位机无法对工作面状态进行监测,智能化功能就无法实现,所以此信息是动态调度策略的重点。
2 基于EDF的总线调度策略设计
EDF即最早截止期限优先,是一种依据任务截止时间来确定任务优先级的调度算法。CAN总线采用的是一种多主形式通信,总线上每一个节点都能取得总线控制权,并向其他节点发送数据。当总线上同时有多个节点向总线发送消息时,会形成总线冲突,CAN总线会采用非破坏性总线仲裁技术,持续性的监听总线电平,并不断向总线发送要发送的数据帧的标识符位,总线电平分为隐性电平和线性电平,当两种电平同时出现时,只会检测到显性电平,仲裁时当节点发送电平和检测到的总线电平不同时,就失去总线控制权,其他节点继续上述过程,直至最终剩余一个节点获得总线控制权,仲裁结束。所以EDF调度策略的最终实现还是要依靠CAN标识符来实现,CAN标识符的设计至关重要。
2.1 CAN标识符设计
CAN总线的动态优先级调度最终要通过设计CAN数据帧的标识位,也就是CAN数据的ID号来实现。CAN数据帧分为标准帧和扩展帧[18],本设计采用CAN扩展帧,扩展帧拥有29位标志位,能够更容易地实现灵活的动态调度策略,根据液压支架电液控制通信系统的消息种类和消息特点,将CAN扩展帧ID具体划分为以下几段,如图2所示。

图2 标识符功能划分
ID28-26:在液压支架电液控制通信系统中,存在着与安全有关的一系列信息,包括全工作面急停,以及闭锁、故障报警等信息,这类信息传输一旦出现问题,很有可能威胁井下正常安全生产工作,造成无法挽回的人员损伤和经济损失,所以一定要将安全类的信息设置为最高等级优先级,使其一经出现必能获得总线控制权。其次是动作控制信息,是保证整个工作面的功能准确执行的必要信息,需将其设置为第二等级优先级,最后是一系列智能化功能信息,属于非安全类信息,对实时性的要求不像安全信息和动作控制信息那么高,故这些数据优先级设为第三等级。安全等级划分见表1。
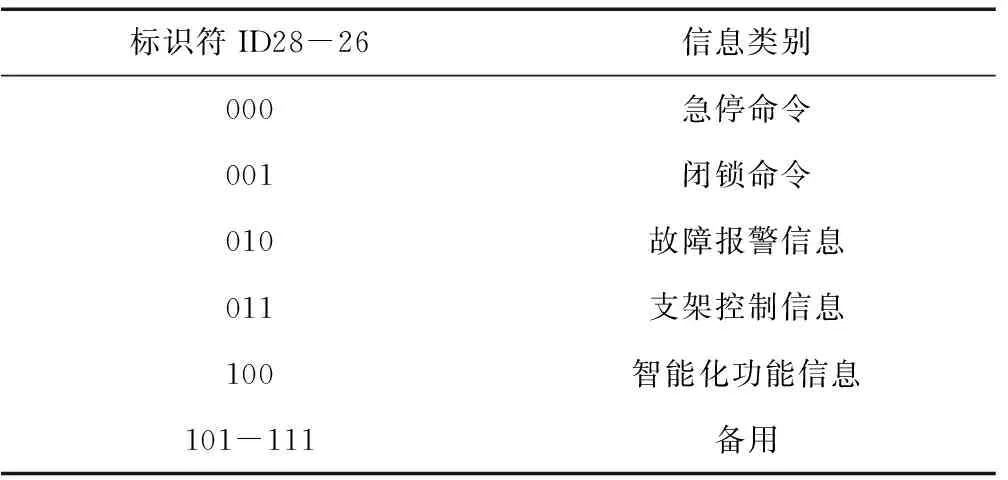
表1 安全等级详细划分
ID25-19:这7位为动态可变优先级段,根据CAN总线动态调度算法,动态调整其优先级,并将计算后的优先级映射到扩展帧ID的动态可变段之上,从而实现CAN总线的动态优先级调度。
ID18-11:这8位ID用于表示发送消息的目标节点地址,即目标控制器编号,用于CAN总线节点消息过滤使用。
ID10-3:这8位ID用于表示发送消息的节点地址,用来区分不同节点发送的相同消息,在发送支架状态信息时,能够获取支架编号。
ID2-0:保留,当液压支架电液控制系统功能扩展,分段ID不够用时,可从这一部分补充使用。
2.2 EDF动态调度算法设计
电液控制通信系统中由于液压支架数量众多,采用主节点协调调度方式反而会加大难度,支架控制器需要根据自身情况结合总线状态判断消息发送时机,本设计参考文献[19,20]中的时间同步方法,将端头控制器作为时钟同步节点,周期性发送时间同步消息,支架控制器接收到时钟同步消息后对自身时钟进行偏差修正,以此达到电液控制通信系统的可靠时钟同步。整个EDF动态调度算法可分为两个部分,节点内优化调度算法和CAN消息发送算法。
2.2.1 节点内优化调度算法
低优先级节点数据发送失败时,数据会暂存在CAN控制器的邮箱当中,支架控制器主控芯片的CAN控制器发送邮箱占满,新的数据到来时有两种处理方式,一种是丢弃新数据,一种是覆盖旧数据,这两种方式都是液压支架电液控制通信系统不希望看到的,我们需要设计消息缓冲区,当节点竞争是失败时,将数据暂存到消息缓冲区,消息缓冲区主要用来存放CAN消息内容和CAN消息的优先级调度信息。节点调度模型示意如图3所示。

图3 节点调度模型
CAN优先级信息可用以下数组{Ta,Td,TD,Δt,t,IDv}计算,其中Ta表示消息到达缓冲区时间,Td表示消息的截止期,TD表示消息的截至时间,Δt表示消息发送剩余时间,IDv表示标识符中的动态可变段,他们的关系如下:TD=Ta+Td,Δt=TD-t,通过划分最大截止期时间段,判断Δt位于第几时间段,再经过映射关系,得到CAN消息动态优先级可变段的标识符。
节点优化调度算法主要是对新发送消息进行预处理,节点优化调度算法过程如下:当新消息到达消息缓冲区时,记录消息到达时间Ta和消息截止期Td,并根据TaTd计算消息发送的截至时间,根据消息的截止时间,在消息缓冲区中的消息队列进行排序,截至时间越近的消息排序越靠前,并根据排序将新消息插入消息队列中。在消息队列中等待总线空闲,使用消息发送算法对数据进行发送。
2.2.2 节点发送算法
节点发送算法主要在消息缓冲区中选取最近截止期消息,将截止时间转换为CAN消息标识符动态可变段,并进行发送。节点发送算法具体过程如下:支架控制器节点持续监测总线状态,数据缓冲区中有数据,总线状态为空闲时,将消息队列中截止时间最近的消息取出,根据Δt和时间分段映射CAN标识符动态可变段。当数据发送成功时,清空CAN控制器的发送邮箱和消息缓存区的数据1,将消息队列中的消息向前移位,然后等待总线空闲,进行下一次数据发送。数据发送失败时,只清空发送邮箱,不清空消息队列最高优先级消息,并等待总线空闲,重新映射标识符动态可变段,并进行发送。节点发送算法流程图如图4所示。
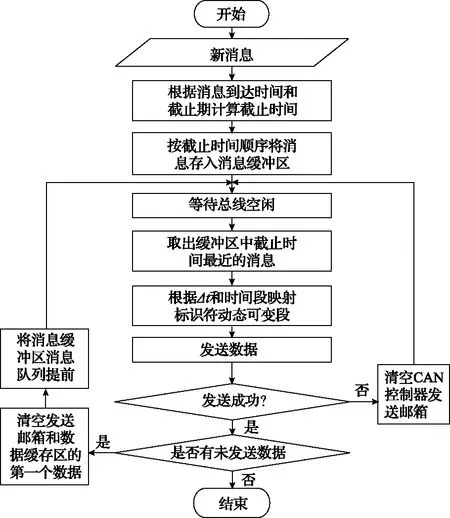
图4 节点发送算法流程
3 标识符动态可变段映射方法
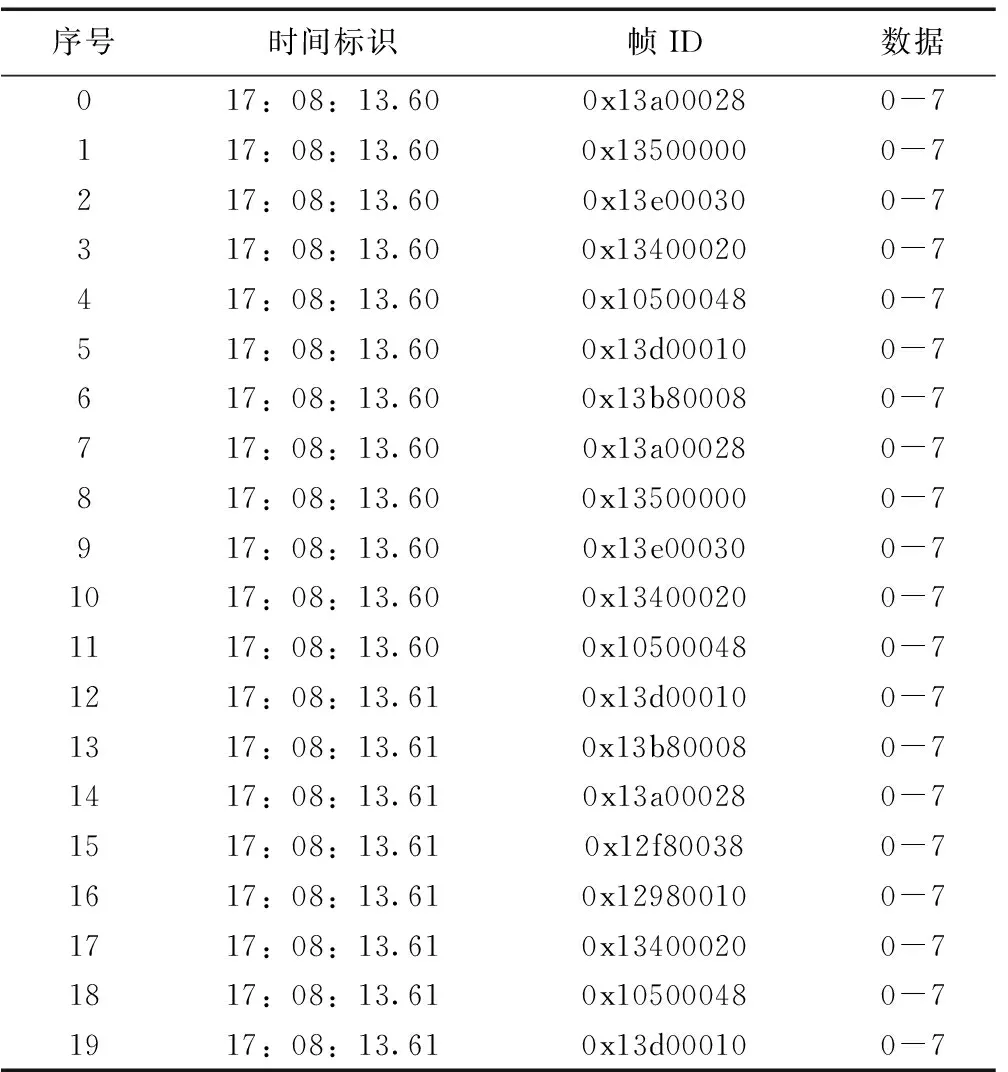
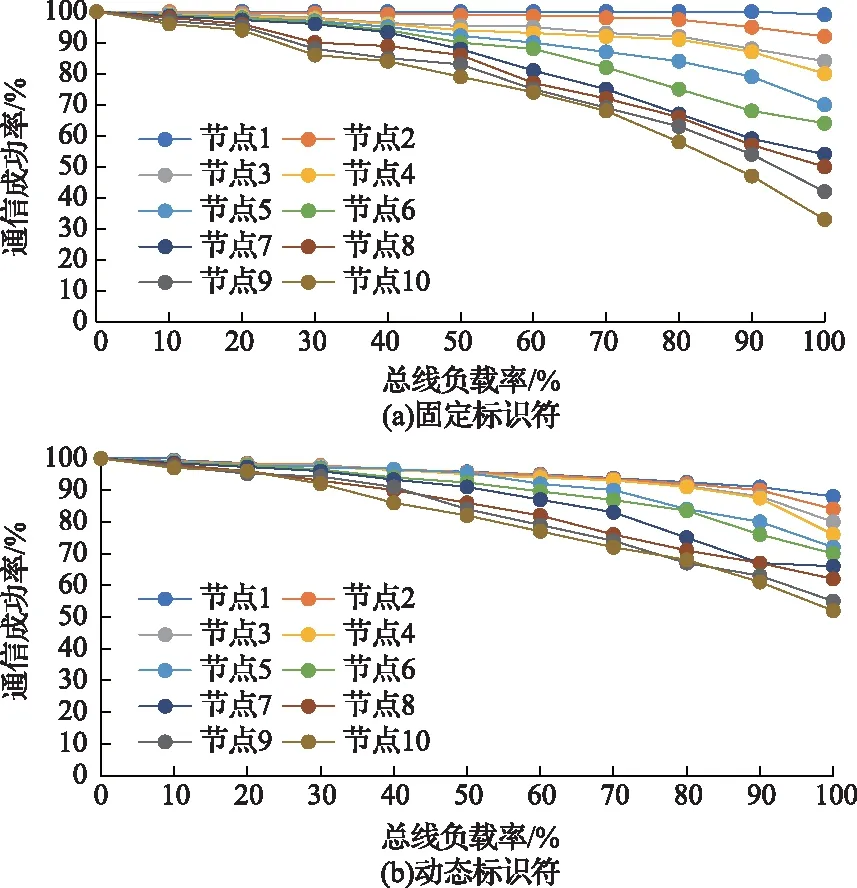
经典EDF算法通过平均分区的方式将时间轴进行分区[21],通过判断Δt所在区间映射标识符动态可变段,若存在消息A和消息B其截止时间为TDA和TDB,且TDA 图5 幂函数分区示意图 由此,标识符动态可变段可通过区间范围与Δt计算,具体计算方法如下: 由上式可得: 将比较得到的x值取整,再按照x值的大小映射到CAN消息标识符的动态可变段即可。 为验证CAN总线动态优先级算法效果,设计以下实验,实验基于煤矿无人值守综采工作面液压支架电液控制系统试验平台,CAN总线速率设置为500kbit/s,不断向端头控制器发送不同截止期信息,通过CAN总线分析仪和上位机软件监测报文发送记录,调整信息发送间隔,改变CAN总线负载率,分别记录10个节点有CAN动态调度策略和无调度策略在不同负载率下的效果,经过数据统计后结果见表2。 表2 部分总线报文发送记录 根据表2帧ID分析可知,消息的动态标识符在根据动态调度策略不断改变,通信成功率如图6所示,对比图6(a)和图6(b)可以看出未使用动态调度策略时,高优先级的节点通信成功率普遍高于低优先级节点,在总线负载率高的情况下尤为明显,节点1通信成功率接近100%,但节点10通信成功率甚至不到40%,低优先级节点的饥饿现象尤为明显。在使用动态调度策略后,低优先级节点的通信成功率均有大幅提升,但动态调度策略牺牲了一部分高优先级节点的通信成功率,在调度过程中无法避免,通过分析可得,基于EDF的动态调度策略有效改善了液压支架电液控制通信系统低优先级节点的饥饿现象,改善了总线通信的公平性。 图6 通信成功率 通过分析液压支架电液控制系统结构和通信系统的消息特点,结合CAN标识符特性和动态调度算法,设计了基于EDF的电液控制通信系统动态调度策略。实验结果表明,该动态调度策略克服了固定标识符通信方式的不足,能够有效改善低优先级节点通信的饥饿现象,极大提升电液控制通信系统的公平性,尤其是增强了电液控制通讯系统在高负载率情况下的可靠性,解决了综采工作面智能化通信数据量增大导致的总线通信延时、错误等问题,为液压支架电液控制系统的智能化打下了坚实的基础。
4 实验验证与结果分析
5 结 语
猜你喜欢
计算机应用(2022年8期)2022-08-24
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
计算机系统应用(2020年8期)2020-03-22
通信产业报(2020年43期)2020-01-15
专用汽车(2016年4期)2016-03-01
图书馆建设(2015年11期)2015-08-24
图书馆(2014年3期)2014-12-25
中国卫生(2014年12期)2014-11-12