基于零控脱靶量的大气层外拦截中制导方法研究
2023-03-23 06:03:16端军红王明宇殷双斌
系统工程与电子技术 2023年2期
赵 蒙, 端军红, 王明宇, 殷双斌, 鲁 娜
(1. 空军工程大学防空反导学院, 陕西 西安 710051; 2. 93792部队, 河北 廊坊 065000)
0 引 言
导弹制导律的设计研究一直是精确制导控制领域内关注的热点课题之一[1-6],导弹制导过程一般分为初制导、中制导和末制导,中制导主要作用是控制拦截器飞行至目标附近空域,为末制导提供良好的交班环境,确保末制导的顺利实施[7-9]。对于弹道导弹目标的拦截,传统破片式杀伤难以有效摧毁弹头目标,必须使拦截弹直接通过动能碰撞方式实现对弹头目标的有效拦截,这对拦截弹制导律的制导精度提出了更高要求[10-11]。中制导与末制导有着本质的不同,中制导终端约束条件不是拦截器与目标的相对距离为零,而是使拦截弹在中段发动机关机后处于“零控拦截状态”,大部分学者在中制导律研究方面,主要是使用最优化理论[12-15]等方法以消除零控脱靶量为目标[16-19]。文献[20]将目标和拦截器的引力加速度差简化后,提出了一种基于零控脱靶量的中制导律,但该制导律只适用于近距离目标拦截情况,在远距离目标拦截中无法保证制导精度。文献[21]设计了一种弹道导弹助推段拦截最优制导律,由于无法精确获得弹道导弹目标推力加速度,该制导律并不实用。文献[22]基于零控脱靶量设计了制导律,文献[23]提出了一种拦截主动防御目标的微分对策制导律,但是在计算过程中都涉及到大量的微积分运算,对弹载计算机的数据处理能力要求非常高。文献[24]设计了一种基于零控脱靶量的大气层外超远程拦截制导方法,在制导过程中由于该制导律的推力方向变化较为剧烈,对拦截器姿态控制系统要求非常高,不利于工程设计。文献[25]提出了一种基于线性重力差模型的拦截弹中制导方法,论文中采用延迟点火的策略去修正预测模型与实际情况的偏差,但是延时点火的具体时间难以精确计算。
本文针对大气层外的中段反导作战,基于零控脱靶量采用最优控制理论,以脱靶量和拦截弹发动机的推力加速度为性能指标,设计了一种拦截弹发动机固定推进时间的中制导策略,仿真结果表明,在脱靶时间和脱靶量计算足够精确条件下,本文设计的反导拦截弹中制导律脱靶量可控制在百米量级内,为拦截弹以动能碰撞方式拦截目标创造了良好的末制导条件。
1 相对运动模型建立
在地心惯性坐标系下,设目标位置矢量为RT、速度矢量为VT,拦截弹位置矢量为RI、速度矢量为VI,则目标相对于拦截弹的位置矢量和速度矢量R=RT-RI、V=VT-VI,反导作战过程中拦截弹和目标的几何关系如图1所示。
图1 拦截过程几何示意图Fig.1 Geometric diagram of interception process
大气层外拦截弹和目标的运动方程为
(1)
(2)
式中:rT,rI分别为RT和RI的大小;μ为地球引力常数;aI为拦截弹发动机推力加速度矢量;f为轨道摄动加速度矢量[26-27]。在地心惯性坐标系下f在3个轴的加速度分量分别为
(3)
式中:x、y、z为空间目标的位置分量;J2=1.082 64×10-3;re为地球赤道半径。
由式(1)和式(2)可得目标相对于拦截弹运动方程为
(4)
由于反导作战过程中拦截弹与弹道目标飞行时间相对较短,相对重力加速度而言摄动力产生的加速度非常小,因此目标与拦截弹的摄动加速度之差则可以忽略不计,也就是fT-fI≈0。另外,假设在目标与拦截弹的相对运动过程中,将拦截弹和目标所受到的地球引力加速度之差简化为线性模型[20],即
(5)
式中:tf为拦截时刻;G(t0)=GT(t0)-GI(t0)为目标与拦截弹的重力差。
设tbo(tf≥tbo≥t0)为拦截弹发动机关机时刻,则拦截弹在固体发动机燃料耗尽之后,拦截弹推力加速度aI=0,联立式(4)和式(5)可解得拦截弹和目标相对运动方程:
(6)
(7)
拦截弹中制导发动机关机后,后续时间直至末制导拦截弹将无控自由地向目标飞行,因此中制导终端约束不是使拦截弹与目标之间的相对距离为零,而是在中制导结束后使拦截弹在无控状态下飞行至目标,即零控脱靶量为零。
根据脱靶量定义以及弹目相对运动方程,拦截弹在无控飞行状态下,脱靶时刻可根据下式求解:
R(tf)·V(tf)=0
(8)
将式(6)、式(7)代入式(8)得
(9)
其中,脱靶时刻tf可通过牛顿迭代法求解式(9)获得,最终可得零控脱靶量预测值为
(10)
2 拦截弹制导律设计
将目标相对于拦截弹运动方程改写成状态空间表示形式:

(11)

根据拦截弹和目标的相对运动方程,令t0=tbo可知
(12)
所以
X(tf)=P1X(tbo)+P2
(13)
式中:
在反弹道导弹作战中,要实现对弹道导弹的有效拦截,则拦截弹的脱靶量必须足够小,以保证拦截器与目标的直接碰撞,另外由于拦截弹的有效载荷有限,所以其携带的固体燃料也是非常有限的,在中制导过程中还要控制能量消耗。因此,以拦截弹与目标相对距离和拦截弹发动机的推力加速度作为优化指标,设性能指标函数[28-29]为
(14)
根据状态空间方程和性能指标函数,可得哈密顿函数[30-31]为
(15)
正则方程为
(16)
式(16)为一阶齐次微分方程组,可解得
λ(t)=e-ATtλ(0)=
(17)
终端指标函数可以表示成拦截弹发动机关机时刻预测出脱靶时刻拦截弹与目标相对位置的平方形式,因此终端条件可表示为
(18)
所以横截条件
(19)
所以
(20)
令
根据最优控制理论,极小值条件可通过求解控制方程获得,由控制方程∂H/∂U(t)=0可得
U(t)=-BTλ(t)=-BTω(t,tbo)λ(tbo)
(21)
联立方程式(19)和式(21)可知
(22)
将式(20)、式(21)代入到状态方程式(11)中得
(23)
解方程式(23)可得
(24)
令t=tbo可得

(25)
将式(25)代入式(22),化简后得到制导加速度:
(26)
式中:tbo≥t≥0;tg=tf-t为剩余飞行时间;tb=tbo-t为发动机剩余工作时间。
在上述计算过程中,将拦截弹和目标的引力加速度差利用线性化重力模型替代,若目标与拦截弹的相对距离较近,可将目标和拦截弹引力加速度差视为零,即GI(t0)≈GT(t0),则拦截弹发动机关机后目标相对于拦截弹的运动方程为
V(t)=V(t0)
(27)
R(t)=V(t0)(t-t0)+R(t0)
(28)
则预测的脱靶量和脱靶时刻为
(29)
同理,令式(11)中U=-aI(t)、式(13)中X(tf)=P1X(tbo),再次使用最优化理论可解得
(30)
将式(10)、式(29)代入式(26)、式(30),可得到通用形式的制导律:
(31)
式中:Rmiss(t)表示为t(tbo≥t≥0)时刻拦截弹与目标之间的零控脱靶量。当拦截弹的推力发动机工作时间tbo设定好之后,目标速度和位置状态可根据Kepler理论进行实时估计,拦截弹的位置和速度可由弹载测量设备实时获取,拦截弹发动机点火后可根据式(31)近似估算的加速度指令制导控制拦截弹飞行。
3 脱靶量的计算
根据第2节内容可知,制导加速度最终可以表达为脱靶时刻tf、拦截弹发动机工作时间tbo以及脱靶量Rmiss的函数,在发动机工作时间以及脱靶时刻确定以后,接下来就是如何精确预测脱靶量Rmiss。制导律设计中,终端指标函数表示为拦截弹脱靶时刻拦截弹与目标相对位置的平方,由于论文中通过近似等效方式获得拦截弹与目标之间的相对运动方程,与真实的相对运动方程必然存在着差异。
当设定拦截时间tf、发动机工作时长tbo后,关于脱靶量Rmiss的预测一般有两种方法。一种是利用等效近似的解析方法来求解脱靶量的大小,这种方法优势是计算速度相对较快,但是计算精度低,例如式(10)、式(29)就是利用近似等效方法求解。另一种是利用Kepler椭圆轨道理论分别迭代计算拦截弹和目标的位置矢量,然后做差来求解脱靶量,这种方法计算精度很高,但是在制导过程中需要持续迭代求解目标和拦截弹的位置。
近似等效的解析方法论文中已经有相关计算方法,下面重点就如何利用Kepler理论迭代计算脱靶量大小的方法进行介绍,计算流程图如图2所示,具体计算步骤如下。
步骤 1初始化,根据t0时刻拦截弹和雷达获取的目标运动状态,在拦截弹推力发动机工作之后开始计算。
步骤 2根据初值,计算起始时刻的零控脱靶量。
步骤 3根据计算出的零控脱靶量计算拦截弹的推力加速度。
步骤 4以Δt为步长,迭代更新计算拦截弹和目标位置矢量和速度矢量,其中Δt越小,精度越高,但是迭代次数也相应增加。
步骤 5判断该时刻t与tbo的大小,若t≤tbo,则返回步骤 2,令t=t0+Δt继续迭代计算;否则结束计算。
图2 脱靶量计算流程图Fig.2 Miss distance calculation flow chart
4 仿真验证
4.1 仿真条件
制导律仿真验证时,一般都是以拦截时刻的脱靶量为指标进行衡量,下面就本文提出制导律的有效性进行验证,参照文献[10]中的数据,拦截弹和目标初始运动参数如表1所示,弹目相距1 560 km,拦截弹中制导段推力发动机工作时间为15 s。
表1 拦截弹和目标的状态信息
4.2 脱靶量仿真
制导加速度最终表达为脱靶时刻tf、拦截弹发动机工作时间tbo以及脱靶量Rmiss的函数,下面以表1中目标和拦截弹的运动数据,对脱靶量进行仿真计算。仿真时间从中制导发动机工作开始至发动机关机结束,共计工作15 s,中制导统一使用式(31)进行制导,将不同的脱靶量计算方法应用到拦截弹中制导过程,制导过程中脱靶量的变化结果如图3~图5所示。其中预测图3使用式(10)、图4使用式(29)、图5使用Kepler迭代法计算脱靶量,真实脱靶量是通过轨道积分计算而得到的。中制导结束后,不同方法估计的脱靶量和真实脱靶量如表2所示,由仿真结果可见,Kepler迭代法预测出的脱靶量精度最高,式(29)预测的精度最差,式(10)介于两者之间。
图3 式(10)预测出的脱靶量变化曲线Fig.3 Variation curve of miss distance predicted by equation (10)
图4 式(29)预测出的脱靶量变化曲线Fig.4 Variation curve of miss distance predicted by equation (29)
图5 Kepler迭代法预测出的脱靶量变化曲线Fig.5 Variation curve of miss distance predicted by Kepler iterative method
4.3 仿真数据
从图6可以看出,自惯性坐标系下,加入中制导后拦截弹逐渐向目标运动。下面着重对不同模型下制导律的性能进行仿真比较,仿真计算中,脱靶时刻分别由式(9)、式(29)迭代计算,如图7所示,其中t1利用式(29)计算,t2利用式(9)计算。

表2 脱靶量计算结果
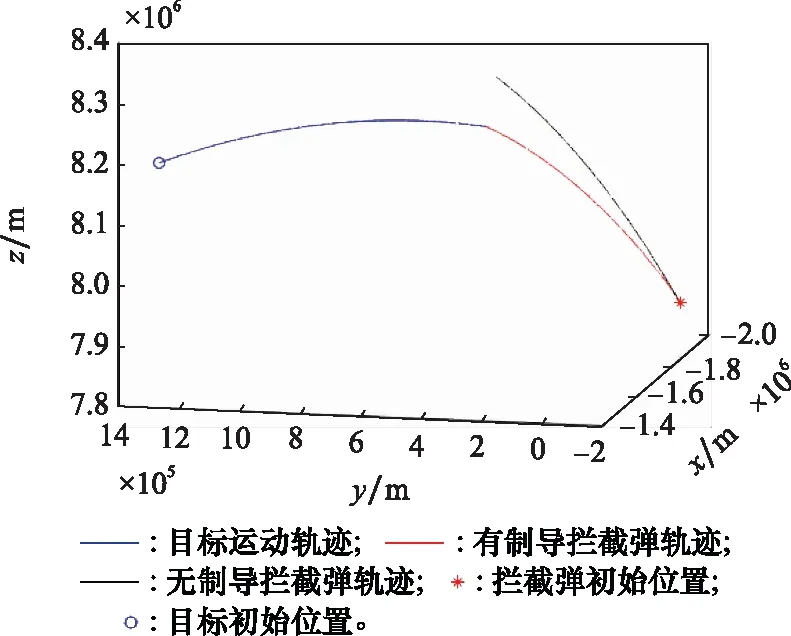
图6 惯性坐标系下拦截弹和目标的运动轨迹Fig.6 Trajectory of interceptor and target in inertial coordinate system
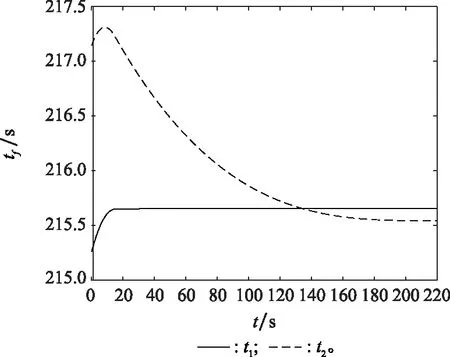
图7 脱靶时刻的迭代计算结果Fig.7 Iterative calculation results of miss time
分别利用式(26)、式(30)和式(31)制导控制拦截弹的飞行状态,使用式(31)制导时,脱靶量的大小利用Kepler理论迭代计算获得,具体计算流程如图2所示。中制导过程中拦截弹与目标的脱靶量(弹目相对距离)变化曲线如图8、图9所示,其中R1、R2、R3、R4分别表示使用式(30)制导、使用式(26)制导、使用式(31)制导以及拦截弹在无制导时脱靶量变化曲线,拦截效果如表3所示。由仿真结果可知,使用Kepler迭代法求解出的脱靶量最小,仅为4.48 m,为拦截弹以直接碰撞方式实现对目标的拦截创造了优良的末制导条件;使用线性重力差模型得到的脱靶量为330.8 m,还需末制导继续修正;使用零重力差模型得到的脱靶量为7 724.8 m,末制导可能无修正能力,可见该模型对于远距离拦截效果差。仿真结果表明,中制导的制导精度与脱靶量估计精度密切相关,若脱靶量计算精准,本文所提出的拦截弹中制导律能够使制导拦截弹以直接碰撞方式实现对目标的拦截。与文献[10]所提方法相比,本文所设计的制导律制导精度更高,在迭代计算下制导精度可达米级。
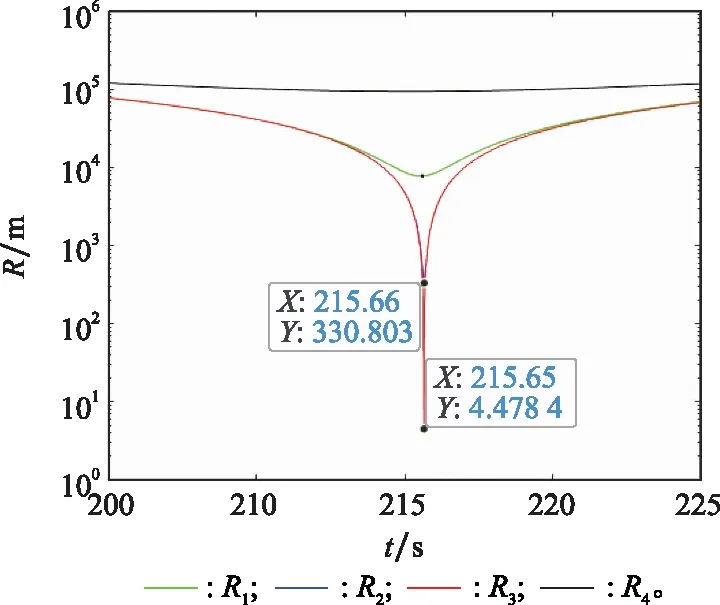
图8 脱靶量仿真结果Fig.8 Miss distance simulation results

图9 脱靶量仿真结果局部放大图Fig.9 Partial enlarged view of miss distance simulation results

表3 拦截效果
图10是使用不同制导公式时拦截弹制导加速度变化曲线,其中a1、a2、a3分别是利用式(30)、式(26)、式(31)计算出的拦截弹发动机推力加速度大小。由图可见,a2与a3大小相差不大,但是都与a1相差较大,这是由于式(30)在计算过程中将目标与拦截弹的重力差简化为零的结果,这也就是图9中在脱靶时刻导致脱靶量大的原因,因此为了精确估计零控脱靶量,拦截弹与目标间的重力差必须要合理考虑。
在上述仿真中脱靶时刻是根据拦截弹和目标运动状态预测出的,一旦拦截弹和目标的运动参数确定,脱靶时刻也就基本确定了。然而实际反导作战中,脱靶时刻并不固定,而是根据拦截弹的发射时刻、运动参数等设定的,脱靶时刻直接影响着拦截弹的运动特征,下面着重讨论脱靶时刻对拦截弹加速度指令的影响。分别设置脱靶时刻为130 s、150 s、170 s、190 s、210 s,利用式(31)进行中制导,仿真结果如图11和图12所示。
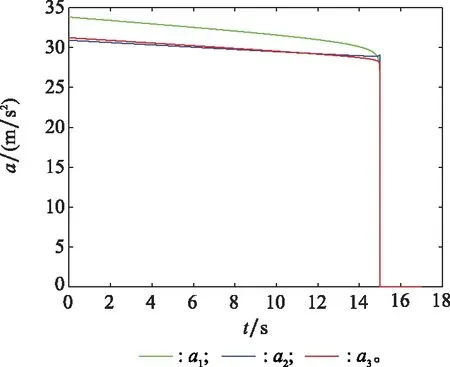
图10 不同制导律下拦截弹加速度变化曲线Fig.10 Acceleration variation curve of interceptor under different guidance laws
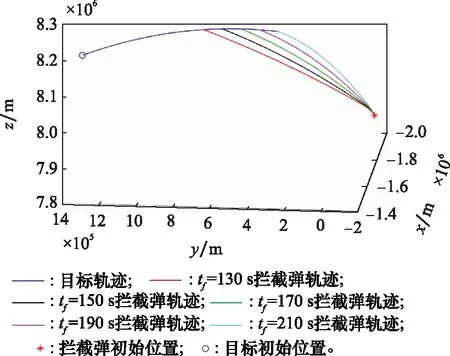
图11 不同脱靶时刻下拦截弹的运动轨迹Fig.11 Trajectory of interceptor at different miss times
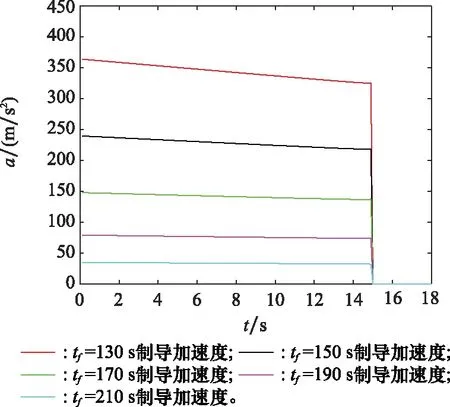
图12 不同脱靶时刻下拦截弹的加速度变化曲线Fig.12 Acceleration variation curve of interceptor at different miss times
其中,图11为不同拦截时刻拦截弹与目标的运动轨迹,对应的脱靶量分别为8.6 m、7.9 m、6.8 m、5.2 m、4.2 m,如表4所示,这进一步验证了制导算法的有效性。图12为不同拦截时刻拦截弹的加速度曲线,可见脱靶时刻在130~210 s之间时,拦截弹的机动过载在3g~37g范围变化,实际在机动过载过大时拦截弹可能无法承受。假设发动机能够提供最大的推力加速度为amax,对于采用固定推进时间的中制导发动机,为了保证制导过程中发动机推力加速度不超过amax,需要合理设计脱靶时刻来实现这一目标。

表4 不同脱靶时刻拦截效果
5 结束语
本文基于零控脱靶量采用最优控制理论,对大气层外拦截弹和弹道导弹目标的交战空间进行了理论推导,设计了一种拦截弹中制导指令,通过仿真计算发现拦截弹的制导精度与零控脱靶量的预测精度密切相关,针对固定推进时间的中制导过程讨论了调节拦截弹机动过载大小的实现途径。仿真结果表明,在脱靶量预测精确条件下,本文设计的反导拦截弹中制导律脱靶量可控制在百米量级内,制导精度比较高,在中段制导结束后,为拦截弹顺利实施末制导提供了优良的条件。下一步将主要围绕零控脱靶量的精准估算开展研究,期望相关研究结论对反导拦截弹制导律设计及相应的仿真技术研究提供一定的借鉴和参考。
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:20
环球人物(2022年4期)2022-02-22 22:05:06
小资CHIC!ELEGANCE(2021年32期)2021-09-18 06:17:14
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
爆笑show(2015年4期)2015-06-24 01:55:12