基于图像识别与远程校准的潮位观测系统设计
2023-03-21 11:25:50王亚丁胡轶群
海洋技术学报 2023年5期
王亚丁,王 鹏,田 政,胡轶群
(1.国家海洋技术中心,天津 300112;2.自然资源部海洋观测技术重点实验室,天津 300112)
潮汐观测资料对海洋灾害预警预报、海洋工程建设及海洋潮汐开发利用具有重要意义。我国自然资源部辖属的潮位自动观测站,海事部门、港务部门和涉海大型企业辖属的潮位监测站基本上都采用浮子水位计进行潮位观测[1-2]。浮子水位计作为一种常用潮位测量仪器,随着使用年限增加并经受物理应力或温度变化,关键性能逐渐下降,会产生数据漂移,导致测量结果变得不可靠,最终观测的潮位数据质量会受到影响。虽然漂移是无法消除的,但它可以通过校准来发现。校准就是仪器性能与已知准确度的标准进行的比较。校准可确保浮子水位计的测量结果的准确度,控制在所要求的技术指标内[3-5]。
目前,浮子水位计现场校准都采用人工校准方式,即工作人员定时到潮位观测场,采用井外水尺或井内水尺作为准确度的标准,手动调节浮子水位观测数值,使浮子水位观测数值与井外水尺或井内水尺的数据相一致。这种校准方法,不仅需要工作人员必须到潮位观测场才能进行,更由于人工读取数据,会人为地造成一定的误差,影响校准的准确度。
针对这一实际问题,设计了基于图像识别与远程校准的潮位观测系统,该系统依靠在潮位观测场搭载摄像机拍摄目标,采集井内水尺图像,并通过4G、5G 通讯将井内水尺视频图像和浮子水位计观测的数据传输至数据中心,数据中心软件通过图像识别获取井内水尺当前潮位并存储,对井内水尺潮位与浮子水位计观测的数据进行对比分析,判断浮子水位计观测的数据是否发漂移,如果发生数据漂移,数据中心软件把漂移量发送给浮子水位计,进行远程校准。基于图像识别与远程校准的潮位观测系统实现了浮子水位计自动无人校准,大大节省了人力成本,更减少了因人工校准造成的系统误差,提高了校准的准确度,可完全满足海洋站潮位观测无人值守的要求。
1 系统组成
基于图像识别与远程校准的潮位观测系统由观测设备、数据中心、传输网络3 部分组成[6-8](图1)。观测设备包括浮子水位计和视频采集系统,为了保持原有水位计观测的稳定性,浮子水位计和视频采集系统都采用独立电源供电和独立数据传输网络,浮子水位计在原有自主研制的成熟产品上进行技术升级,增加远程校准功能。
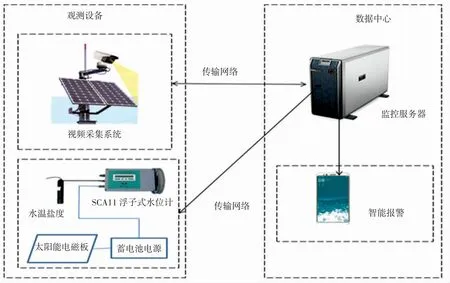
图1 基于图像识别与远程校准的潮位观测系统组成图
2 观测设备
观测设备包括浮子水位计和视频采集系统,浮子水位计1 min 主动传输1 次观测数据给数据中心,数据包采用国产SM4(Shang Mi)算法加密。视频采集系统除了5 min 主动传输1 次现场井内水尺图像外,数据中心可通过传输网络对现场井内水尺实时视频监测,定期校准摄像头拍摄角度,对视频采集方位进行调整,使对井内水尺的采集始终处于最佳位置。
2.1 浮子水位计
浮子水位计可安装在海岸、海岛、海上油气平台、防波堤、码头、水库、河流等地,对潮汐或水位进行长期、自动、连续监测。
2.1.1 浮子水位计组成
浮子水位计由浮子、重锤、钢丝绳、顶丝、浮子绳轮、重锤绳轮、机箱、插座组成,机箱内部集成转动轴承、变速齿轮、轴角编码器、采集控制板、通信插座、电源插座等(图2)。
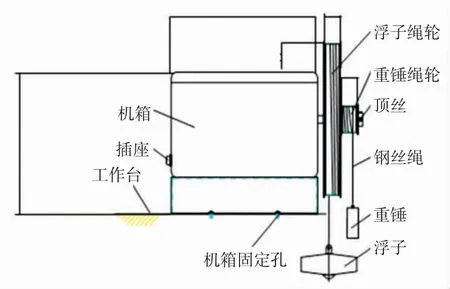
图2 浮子水位计结构图
2.1.2 浮子水位计工作原理
当浮子随水面升降时,带动绳轮转动,绳轮通过轴承和变速齿轮带动轴角编码器轴承转动。采集控制板每秒钟采集一次轴角编码器的编码,处理算法是平均值滤波法,每分钟对连续的60 个观测数据进行排序,去掉其中最大和最小的各5 个观测数据,将剩余数据取平均值,作为1 min 的实际观测数据,并用于计算高低潮。采集控制板获取1 min观测数据工作流程见图3。
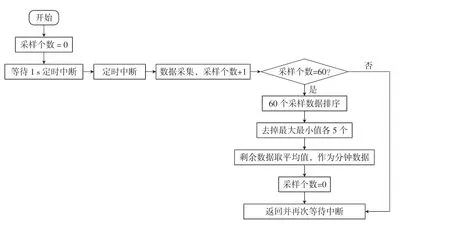
图3 采集控制板获取1 min 观测数据工作流程
浮子水位计设计了一个漂移量参数,通过修改这个漂移量参数,可修正浮子水位计数据输出值与井内水尺数据一致,数据输出值等于实际观测数据减去漂移量参数。漂移量参数可以在浮子水位计系统中设置,也可以通过数据中心软件发送“漂移量校准”命令设置。
2.2 视频采集系统
视频采集系统采用分离式设计,设备主要包括摄像头(低照度白光型),补光灯,太阳能板,电池箱,4G、5G 通讯设备,避雷针等,其中摄像机正对验潮井水尺,太阳能电池板与4G、5G 通讯设备位于室外楼顶。视频采集系统示意图如图4 所示。视频采集系统除了5 min 主动传输一次现场井内水尺图像外,数据中心可通过传输网络对现场井内水尺实时视频监测,对视频采集方位进行调整,使对井内水尺的采集始终处于最佳状态。
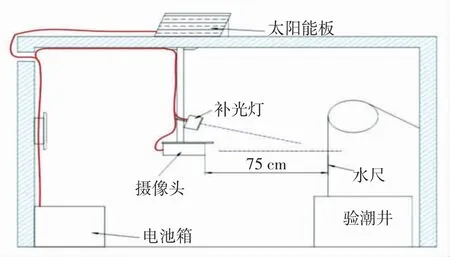
图4 视频采集系统示意图
视频采集系统具有如下特点。
(1) 色彩性
低照度摄像机是指在较低光照度的条件下仍然可以摄取清晰图像的监控摄像机。白光摄像机所具有的产品特性是其他摄像机所不能比拟的,白光摄像机定焦系列一般都采用纯彩色高线低照度,在白天拍照的色彩还原效果会更加真实,即使是在夜间也能清晰地捕捉到彩色图像。
(2) 可靠性
白光摄像机采用稳定的LED 进口白光灯芯,加上配套的电路设计和完美的机身导热系统,确保白光摄像机具有较长的使用寿命。
(3) 智能性
云台是视频监控系统的转向装置,它可以负责监控摄像头水平350°和垂直75°两个方面的转动。数据中心软件可以通过传输网络远程控制云台,调整摄像头监控方位,使现场水尺视频监测处于最佳状态,有利于图像处理软件的数据分析、处理。
(4) 防腐蚀
摄像机外壳采用优质316 不锈钢材质防腐。视频采集系统安装在室内,镜头被环境污染较小,可在每次巡检时对镜头进行污染处理。
3 数据中心
数据管理软件安装在数据中心的服务器上,是海洋站潮位自动观测系统的重要组成部分,功能特点如下。
(1) 负责接收一台或多台浮子水位计传来的观测数据,对数据进行存储和管理,生成用户所需的数据文件。
(2) 接收视频采集系统传来的水尺图片数据,通过对水尺图片进行图像识别获取井内水尺读数并存储到数据库。
(3) 定时对水尺数据和浮子水位计观测的潮位数据进行对比分析,判断浮子水位计的潮位是否发生漂移,如果发生漂移,在提供报警的同时,数据管理软件可通过传输网络把漂移量发送给浮子水位计,进行浮子水位计远程校准工作。
死亡话题亲子谈话量表(Parental Disclosure with Children about Afterlife Scale,PDCA量表)(Misailidi & Kornilaki,2015)旨在测量在亲子谈话中,家长跟孩子谈及死亡话题时的用词倾向。共包含8个条目,采用5点Likert式评分,得分越高,说明被试使用相关词汇的频次越高。
(4) 提供浮子水位计数据和水尺数据人工对比分析界面,工作人员可根据分析结果,对浮子水位计远程人工校准。
(5) 同时能对海洋站点的基本信息进行管理,能对观测系统设备的运行状态进行监控,满足海洋站观测业务化运行需求。
(6) 数据中心数据管理软件采用C/S(Client/Server)架构模式,数据库采用Paradox,采用多线程并发技术实现与浮子水位计、视频采集系统的数据通讯。
(7) 针对每台浮子水位计和每套视频采集系统各创建一个数据接收线程和一个数据处理线程。多线程并发技术的使用极大提高了数据中心软件性能,在接收多台浮子水位计和多套视频采集系统时,能够高性能并且稳定工作。
3.1 水尺识别关键算法分析
水尺随着潮汐的变化而进行上下运动,其读数符号分为两类:字符标记和长短刻度线标记。字符标记包含3 种类型的标记:米级字符标记(如3 m、4 m 或3XX、4XX)、分米级字符标记(如30、40 或3X、4X)、厘米级字符标记(如1,2,3,…,9)。长短刻度线标记对应整厘米刻度,刻度的最小单位为1 mm、2 mm 或5 mm。通过对井内水尺图像特征进行分析,井内水尺读数读取算法利用帧间差分对动态环境适应性强的特点获取井内水尺运动区域,通过CRAFT(Character Region Awareness for Text Detection)、ResNet50、强边缘检测、CTC(Connectionist Temporal Classification)等深度学习算法获取字符标记和长短刻度线标记,然后通过投票机制和连续读数平滑处理获取精确的井内水尺读数值[9]。本文井内水尺算法流程图见图5。

图5 井内水尺算法流程图
井内水尺算法分为4 个步骤。①运动区域检测:基于帧间差分法做运动区域检测并截取,获取图像中实时井内水尺区域;②刻度线标记获取:基于强边缘检测算法获取井内水尺刻度读取线位置;③水尺字符检测与识别:提出CRAFT 单字符检测分支+带字典的识别模型,基于CRAFT 算法将井内水尺米级、分米级、厘米级字符标记进行字符检测,然后基于ResNet50 和CTC 算法,获取字母和数字等字符标记;④水尺数值输出:通过投票机制及数学形态滤波输出井内水尺准确值。
3.2 水尺数据和浮子水位计观测的潮位数据的对比分析
浮子水位计观测的潮位数据采用平均值滤波法,是一分钟数据的平均值,而视频采集系统采集的水尺图像数据是瞬时抓拍值,两者观测数据的时间段和含义略有不同,故两者在观测数值上会存在一定偏差,用简单的几个数据对比,会和以前人工校准方式类似,很容易造成误差,故系统采用最近3 天、采样频率为5 min 连续观测数据进行对比分析,计算系统不确定度、随机不确定度、综合不确定度,当综合不确定度大于《海洋观测规范 第2部分:海滨观测》(GB/T 14914.2—2019)[10]要求综合不确定度±3 cm 时,系统不确定度作为漂移量,并通过传输网络把漂移量发送给浮子水位计进行校准。漂移量分析计算流程如图6 所示。
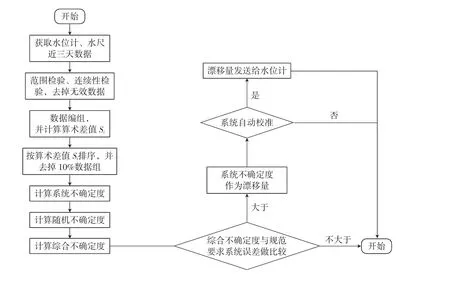
图6 漂移量分析计算流程
漂移量分析计算步骤如下。
(2) 对选取的浮子水位计观测的潮位数据和井内水尺数据进行范围检验和连续性检验,去掉其中的无效数据,当一个时刻浮子水位计观测的潮位数据或井内水尺数据有一个无效时,这个时刻的数据都作无效处理。其中范围检验包括极值范围检验、仪器量程范围检验、莱因达准则和格拉布斯准则;连续性检验包括梯度检验、剑锋检验、恒定检验[11-12]。
(3) 对选取的有效浮子水位计观测的潮位数据Pyi和井内水尺数据Pi按同一观测时间编组并做差,计算算术差值Si。
(4) 对算术差值Si按绝对值大小进行排序,去掉其中较大的10%数据组。
(5) 根据《水位观测标准》(GB/T 50138—2010)[13]中规定,按式(1)计算系统不确定度。
式中,Si为算术差值;N 为观测次数。
(6) 随机不确定度按式(2)计算。
式中,Pyi为水位计观测的潮位数据;Pi为井内水尺数据。
(7) 综合不确定度按式(3)计算。
(8) 综合不确定度与规范要求综合不确定度作比较,如果误差超过±3 cm,系统不确定度作为漂移量,向数据中心发出报警,报警方式有声音、动画、短信通知相关工作人员等。
(9) 如果自动校准标志为真,通过传输网络把漂移量发送给浮子水位计进行校准。
4 示范应用与人工校准方法的对比
4.1 示范应用
2021年10 月,在自然资源部管辖海洋站点开展系统安装并示范应用,水尺监控界面如图7 所示,浮子水位计数据和水尺数据对比分析界面如图8 所示。
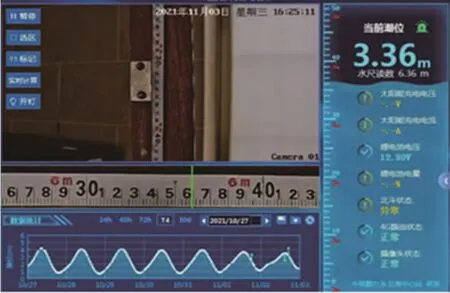
图7 水尺监控界面
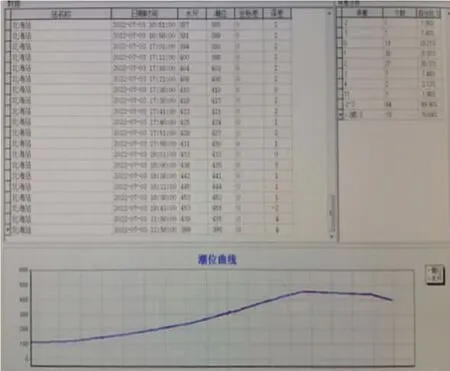
图8 浮子水位计数据和水尺数据对比分析界面
系统自安装后,运行稳定,系统能够自动通过对水尺数据和浮子水位计观测的潮位数据进行对比分析,实现对浮子水位计的远程自动校准;同时工作人员通过软件提供的浮子水位计数据和水尺数据对比分析功能,能够实现数据中心对浮子水位计的远程校准功能,满足业务化运行需要。
4.2 与人工校准方法的对比
为了验证自动校准的准确性,系统安装运行3个月后,进行了浮子水位计与井内水尺的现场对比工作,比测时间为4 h,每半小时比测一次,共进行8 次人工比测。根据《水位观测标准》(GB/T 50138—2010)[13]中规定,浮子水位计与井内水尺的现场对比数据见表1,不确定度计算结果表见表2。

表1 浮子水位计与井内水尺的现场对比数据表单位:cm
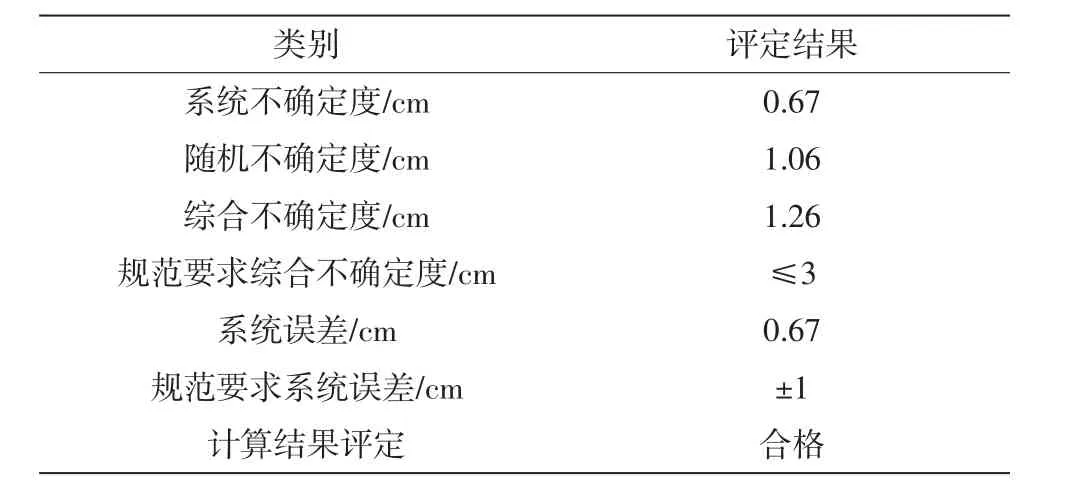
表2 不确定度计算结果表
由表2 可以看出,浮子水位的综合不确定度符合规范要求,系统误差满足规范要求的系统误差±1 cm 要求。系统自动校准的观测数据,能够真实反映该站点的实际观测数据,能够作为业务化数据使用。与人工校准方法相比,在保证数据准确性的基础上,改变了以前由工作人员定时到潮位观测场人工校准的工作状态,不仅提高了工作效率,而且节省了人力、财力成本。
5 结论
基于图像识别与远程校准的潮位观测系统,改变了由工作人员定时到潮位观测场人工校准的工作方式,不仅提高了工作效率,更减少了因人工观测造成的系统误差,提高了校准的准确度。该系统运行稳定,浮子水位计在自主研制的成熟产品基础上,进行技术升级,增加远程校准功能,视频采集系统选用市场上成熟产品,实现井内水尺图像的采集,并通过传输网络把井内水尺图片传输到数据中心。该系统可完全满足海洋站潮位观测无人值守的要求。该系统可应用于自然资源部辖属的潮位自动观测站,海事部门、港务部门和涉海大型企业辖属的潮位监测站,能够为海洋开发与管理、海洋防灾减灾、海洋安全航行保障提供更加准确的潮位数据,充分发挥海洋观测在促进经济发展中的重要作用。未来,可侧重开发系统的兼容性,使该系统更多地兼容海洋观测网、水文观测网主流的自动潮位计、水位计,在海洋、水利等领域得到更广泛的应用。
猜你喜欢
珠江水运(2021年24期)2022-01-23 08:25:10
船舶力学(2021年3期)2021-03-29 10:06:52
水运工程(2020年2期)2020-02-26 06:06:42
科技与创新(2019年22期)2019-12-07 05:31:26
广船科技(2019年2期)2019-10-16 10:43:02
中国惯性技术学报(2018年4期)2018-11-08 10:56:40
石油石化节能(2016年12期)2016-06-28 16:30:31
浙江大学学报(工学版)(2016年2期)2016-06-05 09:20:51
中国设备工程(2015年5期)2015-12-27 12:34:53
水利信息化(2015年5期)2015-12-21 12:54:38