基于实况气象的船载走航大气成分观测自动进样系统设计
2023-03-21 11:25姜亦飞吕洪刚王海燕杜文生
海洋技术学报 2023年5期
姜亦飞,吕洪刚,王海燕,杜文生
(1.国家海洋环境预报中心 自然资源部海洋灾害预报技术重点实验室,北京 100081;2.国家海洋环境预报中心,北京 100081;3.北京理加联合科技有限公司,北京 100085)
大气成分在地球生态系统中起着重要的作用,它影响大气圈层与其他圈层之间的相互作用[1]。工业革命以来,随着人类大规模生产活动不断向大气中排放温室气体、气溶胶与反应性气体等,地球大气成分的浓度和分布都发生了显著变化。如大气中二氧化碳(CO2) 和甲烷(CH4) 等温室气体浓度的快速上升,使得全球温室效应不断加剧,引起了全球变暖、海平面升高、冰川消融与海洋酸化等[2-4];大气中氯氟烃(CFCs) 的出现,不断消耗平流层中的臭氧(O3),形成了南极臭氧空洞[5];化石燃料的燃烧、交通运输过程中产生的酸性物质进入大气,导致了酸雨和光化学烟雾等灾害天气的发生[6-7]。因此,了解大气成分的浓度及变化趋势是开展大气科学研究的基础,也是制定相关政策的重要依据。
本底站观测、卫星遥感反演、浮标观测与走航观测(如飞机、船舶、汽车、无人机等) 等是获得大气成分资料的主要监测手段[8]。其中,本底站观测属于定点观测,受观测范围限制,只能反映所在区域的相关情况;卫星遥感观测与之相比,在空间覆盖率方面有天然的优势,但是容易受天气(主要是云、雾、降水等) 影响,且需要与浮标、船舶等现场实测数据进行验证[9];浮标观测一般成本较高,维护相对困难,且在深海区域的应用仍然比较薄弱。相对而言,走航观测具有观测区域灵活、设备维护方便等优点。因此,船舶走航观测一直是国内外近海调查、大洋和极地科考中获取水体和大气参数最常用的观测方式之一,获取的数据对于推动相关学科的研究和发展起了重要作用[10-11]。20 世纪80年代以来,日本气象厅(Japan Meteorological Agency,JMA)基于在西太平洋获取的逐年走航的CH4观测数据,揭示了西太平洋海表大气CH4分布呈现明显的纬向分布特征[12]。进入21 世纪,欧美发达国家利用高精度观测设备,开展了海洋大气温室气体(主要是CO2和CH4) 船基走航连续观测,结合海洋石油平台观测的CO2和CH4峰值信号,初步构建了“自上而下”估算方法,定量探究了海洋油气开采等人类活动对大气温室气体的贡献[13-15]。
走航观测也存在时空差异性大、代表性不强、局部数据质量偏低(主要受船体排放影响)等缺点,为避免在走航观测中大气采样受到船体排放污染,本文设计了一套具有8 根独立进样管路且可以根据实况气象自动选择进样管路的采样系统,用于提高船载走航大气成分观测数据的准确性和连续性。
1 背 景
船舶走航观测一直以来都是国内外获取海洋大气成分数据最重要的观测方式之一。但是,船舶走航观测的原始数据或多或少均存在部分数据异常偏高的情况,因此经过处理后的数据普遍存在数据不连续、缺测的情况。通过相关调研证实,目前国内外在海洋(极地)科学考察中大气成分观测采样口均为单一固定位置采样口,其常布设于科考船船头的科研桅杆或者船体顶层甲板区域,同时尽可能远离船身主体[11],如图1 所示。因此,在实际观测中,当相对风向与船舶航向一致且相对风速大于船速时,船头的采样口极易吸入来自烟囱和船舶生活区排放的气体,造成气体样品的污染和监测数据的异常[15]。为了解决这一问题,本文开展了相关研究并设计了一套基于实况气象的智能选择多通道大气进样系统。

图1 船载大气成分采样口的常规安装位置(1、2) 及采样口示例
2 系统设计
本装置适用于以船舶为载体的现场观测方式,根据其功能可以将系统大致分为甲板单元、控制单元和进样单元。其中,甲板单元主要包括风速风向传感器、8 条室外进样管路及采样口的防水过滤装置等,其主要功能是获取可供程序判断的气象数据、获得对应象限未受污染的空气;控制单元主要包括数采装置、单片机(内置程序)和电磁阀控制面板等,主要功能是读取风速风向数据,通过自行编译的内置程序进行判断,智能选择进气管路;进样单元包括了电磁阀、多通阀及相应的气路和电路等,该单元属“执行”模块,依据电磁阀控制面板给出的电信号,开启相应的电磁阀,进而贯通相应的管路,最终获得目标采样口不受污染的气体,并对其进行相关分析。装置的总体架构如图2 所示。
3 程序及模块设计
在整个进样系统中,程序是控制各模块的“大脑”,该程序的脚本基于C++语言。程序通过判断实时的相对风向情况,控制各模块准确有序地开展工作。
3.1 程序
本文提及的风向均为相对风向,也叫“合成风向”,是船舶航行在有风海面上所测得的风向,由船风和真风的风向合成而得。本装置将全部风向(0°~360°)平均划分为8 个风扇片区,不同扇区对应的电压信号和电磁阀编号信息如表1 所示。

表1 风向扇区的划分及对应的电压信号和电磁阀编号
程序脚本的判断依据如表1 所示,单片机通过读取数据采集器中风速传感器给出的风向平均值,根据程序判断并给出相应的电压信号,电磁阀控制面板在接收信号后给相应的电磁阀供电,贯通该电磁阀所控制的气路,完成采样口的选择。当风向改变时,通过设置的程序运行间隔时间,重新读取最新的风向数据,程序将按照上述流程重新执行一遍,原电磁阀关闭,新的风向值对应的电磁阀将打开,完成气路的切换。
3.2 系统结构
本文设计的进样系统,其整体结构如图3 所示。风速传感器采用国产机械式风速传感器,需要特别指出的是,传感器在不做船速和航向校正的情况下输出的数据就是相对风速风向数据,采集的原始风速风向数据将存储于数据采集装置。考虑到船载设备的稳定性及便携性,本系统使用单片机来读取数据采集器的数据并对内置程序进行处理计算,单片机作为一种典型的嵌入式微控制器,由运算器、控制器、存储器、输入输出设备等构成,相当于一个微型的计算机,单片机基于内置的程序根据相对风向的结果进行判断,并将结果反馈给电磁阀控制面板,电磁阀控制面板主要由主芯片、控制芯片和多路继电器组成,通过接收单片机传输的电压信号,控制继电器对相应的电磁阀供电。通电时,电磁线圈产生电磁力把关闭件从阀座上提起,阀门打开;断电时,电磁力消失,弹簧把关闭件压在阀座上,阀门关闭。所有的气路最终集成在一个8 通道转换装置,并通过该装置最终进入分析仪器。

图3 采样系统整体结构示意图
8 管路进样口的设计是本装置的创新之处之一,其布局大致如图4(a)所示,相邻采样口与中心位置形成的角度尽量控制在45°左右,采样口亦布设于高处,且尽量不受船体排放的影响。8 个采样口最终通过一个多通道转换器与分析仪的进样口相连,该转换器的结构如图4(b)所示。采样口一般配有图4(a)所示的防水罩和过滤器,防止降水、船头的浪花及大气颗粒物等进入管路被分析仪吸入,过滤器的孔径可以根据实际需求进行选择。管路一般选用不锈钢或铝塑管,避免管路的腐蚀或吸附对大气成分观测结果产生影响。

图4 8 路采样管路布置俯视图及采样口防水过滤装置和气路多通道转换器结构图
4 示例及应用
4.1 观测海域
本文选择中国第38 次南极科学考察船“雪龙2”第一次穿越西风带,以及之后的环南极航行走航大气CO2观测数据作为研究对象。“雪龙2”于2021年12 月12 日在新西兰东南海域正式启航开始全速穿越西风带,12 月17 日穿过60°S 后,逐渐开始绕极航行,并最终于2021年12 月27 日到达位于菲尔德斯半岛的中国南极长城站。该时间段内的船舶航行轨迹及大气CO2浓度变化如图5 所示。

图5 “雪龙2”号航行轨迹及走航大气CO2 浓度变化
4.2 观测方法
本航次以美国LGR 公司(Los Gatos Research Inc.)的GGA-30r 型CO2/CH4/H2O 离轴积分腔输出激光光谱分析仪为分析检测仪器,辅以SYNFLEX1300内壁镀铝材质的大气进样管、Whatman 囊式过滤器(4.5 μm)、除水单元(填充高氯酸镁颗粒的干燥管)、标气单元等。自主组装了一套适用于海洋大气CO2和CH4混合比观测的船基走航高频连续观测系统。航次所用的标气由中国气象局大气成分观测与服务中心提供并进行多轮标校,可溯源至世界气象组织(World Meteorological Organization,WMO)一级标准。
为尽量避免烟囱废气和人员活动等船体人为污染,系统的采样口(单一采样口)布置于“雪龙2”船头科研平台的最高处。现场观测期间,空气经过4.5 μm 的囊式过滤器进入气路,经填充高氯酸镁的干燥管除去水汽,干燥的气体和标气可以选择多通阀进行手动切换,最终进入激光光谱分析仪,本航次设置的采样频率为每5 s 完成并记录一组观测数据,标气的校准时间为24 h,观测系统的结构示意图如图6 所示。单一采样口的设计与本文8 通道采样口设计相比,其始终在固定位置采集样品气体,无法鉴别采集的气体是否为受船体排放而污染的气体,而8 通道采样口的设计可以根据实时的相对风向数据,始终选择干净的空气,从而保证数据的准确性和连续性。
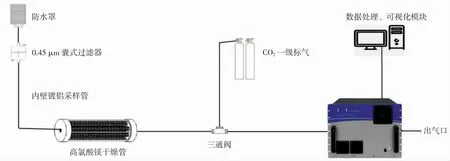
图6 “雪龙2”走航大气CO2 观测系统结构示意图
4.3 结果与讨论
通过分析图5 可知,2021年12 月12 日至12月17 日期间,在“雪龙2”南下穿越西风带的航路上,系统给出的大气CO2浓度主要处于410.0×10-6~420.0×10-6(体积比),且在随后的绕极航行前段,即在到达64°S、141°W 附近海域之前,其监测的CO2浓度值与之前获取的监测数据亦非常接近;而在之后的往东航行期间,受多个气旋过境的影响,走航大气CO2的观测浓度逐渐开始出现波动,其中以2021年12 月22 日前后最为显著,激光温室气体分析仪在当日监测到的CO2浓度值最高达535.1 × 10-6,且当日的CO2日平均浓度也高达429.3×10-6,显著高于之前航程所测的平均浓度。
通过分析南半球西风带气候态气象数据,结合“雪龙2”穿越西风带的气象背景资料和船舶姿态可知:在西风带航行期间,由于西风带位于副热带高气压带与副极地低气压带之间,极易形成温带气旋,且副高向副极地低压散发出来的气流在地转偏向力的作用下,偏转成西风[16]。因此,在“雪龙2”南下穿越西风带过程中,安装于船头科研平台的采样口并未受船体影响,观测数据正常。在之后的往东航行,本文选取了最具代表性的2021年12 月22日的气压场和风场图及“雪龙2”的具体位置,如图7 所示。当时“雪龙2”刚遭遇了本航段最强的一次气旋过程,该气旋具有中心气压低、风力大、影响范围广、整体位置偏南等特点。气旋过境后,“雪龙2”受其后部影响,船位所在区域仍然遭遇了5~6 级、阵风7 级的偏西风影响,且此时的风向与船舶航向是基本一致的,因此,船头前桅杆科研平台的采样口吸入了大量船体烟囱排放的尾气,CO2浓度值显著升高。通过对比同时期温室气体观测卫星(The Greenhouse Gases Observation Satellite)遥感反演产品的CO2数据(https://data2.gosat.nies.go.jp/gallery/fts_l3_swir_co2_gallery_en.html),并结合世界温室气体数据中心(World Data Centre for Greenhouse Gases,WDCGG)公布的全球大气CO2纬向分布特征(https://gaw.kishou.go.jp/publications/global_mean_mole_fractions)可以推断,当日监测到的该区域走航观测的大气CO2浓度数据显著异常偏高,均为受干扰的无效监测数据。在明确了数据异常后,将基于拉依达准则[15]、卡尔曼滤波算法、绝对均值法[17-19]、“气象法”[12,15,20]等,并结合现场操作记录、气象要素、航速航向等数据资料,对走航CO2观测的原始数据进行筛分处理。缺失的数据一般通过多重线性回归插值、克里金插值、反距离权重插值等数学方法来进行填充[21]。

图7 “雪龙2”所在海域的天气形势场(2021年12 月22 日)
图8 是设备一次海试过程的工作状态示意图。本文研究团队选择了一次西风的时间窗口,设备搭载渔船往东航行,且海试期间的风速大于船速。如图8 所示,此时渔船和风的相对风向为0°,程序对照表1 判断相对风向结果,给电磁阀控制面板发出Signal-1 的指令,此时设备的1 号电磁阀Valve1打开,1 号采样管路贯通开启,分析仪吸入了1 号采样口的样气,而通过相对风速判断,此时的1号采样口吸入的是不受船体排放影响的洁净空气,航行期间分析器显示的CO2浓度数据也相对平稳,无明显波动。

图8 系统在海试期间的工作状态示意图
5 总结与展望
本文针对船载走航大气成分观测的现状和存在问题,设计了一套基于实时风向数据自动选择采样管路,进而避免污染的船载走航大气成分观测进样设备。本装置首次采用多管路(8 路)独立进样的模式,基于自行编辑的程序脚本,以判断相对风向来识别气团是否受到干扰,并通过单片机、电磁阀控制面板、继电器等相关元器件的选择和搭配,详细介绍了装置的设计思路和原理。本文最后结合“雪龙2”在南大洋走航大气CO2观测的实例,分析并论述了数据异常的原因及相关解决办法。该装置将有效解决目前船载走航大气成分观测的相关问题,显著提高大气成分走航观测数据的连续性和准确性。未来,需要解决材料和元器件的耐用性、不同环境(极区低温、高湿度、高盐度等)的适用性,以及各管路接口气密性等关键问题,进一步提高系统的稳定性,拓展应用前景。
猜你喜欢
科学大众(2024年5期)2024-03-06
军事文摘(2024年2期)2024-01-10
科学24小时(2023年11期)2023-11-14
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
仪器仪表用户(2021年10期)2021-11-27
航空世界(2018年12期)2018-07-16
小资CHIC!ELEGANCE(2016年26期)2016-12-13
知识经济·中国直销(2016年3期)2016-02-27
风能(2015年8期)2015-02-27