全类型大气波导探测方法研究
2023-03-21 11:25:36唐海川周孟龙黄小毛
海洋技术学报 2023年5期
唐海川,焦 林,周孟龙,黄小毛
(1.海军大连舰艇学院,辽宁 大连 116018;2.中国科学院大气物理研究所,北京 100029;3.中科星图维天信(北京) 科技有限公司,北京 100094;4.万合光电技术有限公司,河南 洛阳 471032;5.汉哲森工控科技有限公司,江苏 无锡 214400)
作为对流层中一种异常大气折射结构,大气波导改变了电磁波的正常传播特性,使得电磁波在波导层中传播损耗减小,传播距离增大,同时由于电磁波部分能量被陷获到波导层内,造成了波导层顶部的电磁盲区[1]。因此,大气波导能够使海上电子设备实现超视距探测与截收,同时也会造成电子设备的波导电磁盲区。作为海洋环境中重要的电磁敏感要素,大气波导严重影响海上电子设备性能的发挥,如何精确探测大气波导环境,对海上雷达通信等设备尤为重要。
大气波导监测是大气波导研究的基础,为分析大气波导成因、总结大气波导分布规律提供数据来源。大气波导通常分为蒸发、表面和悬空3 种波导类型。对于蒸发波导的监测,由于其出现在海洋大气近地层内,形成受海气界面微气象条件影响,一般根据近地层相似理论,利用海面宏观气象水文观测,结合总体通量法(Bulk-Flux),来计算得到蒸发波导高度和强度等特征量[2-5]。对于表面和悬空波导的监测,只要能获取大气折射指数的垂直分布廓线就可以确定是否存在表面和悬空波导,以及波导的高度、厚度、强度和波导所能陷获的最大波长、最低频率等[6]。目前,获取大气折射指数垂直分布廓线的主要手段是利用无线电探空仪、低空火箭探空仪和微波折射仪测量。其中,前两种是间接测量,即直接探测气温、气压和湿度,再将其转换为大气折射指数;后一种是直接测量,即直接探测大气折射指数。
国外如美国早在20 世纪70年代就开始了大气波导监测的相关研究,到目前为止已形成一套从海面浮标、海上铁塔、探空火箭、系留汽艇、探空气球、拉曼激光雷达到飞机航测、卫星遥感等成熟的波导监测方法[6],其大气波导监测设备早在20 世纪80年代末就装备于主战舰艇和航空母舰并且纳入战术辅助决策系统[7]。目前,美国最新的大气波导监测手段就是拉曼激光雷达,但由于日盲和超低高度盲区问题,该手段主要用于舰载蒸发波导的监测,对于表面和悬空波导监测还没有相应的拉曼激光雷达。
对于大气波导的监测方法研究,国内开展的相对晚一些,但近20年来蒸发波导的监测发展尤为迅速。如大连舰艇学院研制的“被动式大气波导探测系统”[8],利用总体通量法对蒸发波导环境进行实时监测,并评估蒸发波导条件下舰载雷达的探测性能。海军工程大学海洋电磁环境研究所应用P-J(Paulus-Jeske) 模型和A 模型等蒸发波导预测模型在我国海区开展了适应性研究[9-11]。解放军理工大学气象学院丁菊丽等[12]基于戴福山的局地相似理论提出了在不稳定状态下使用A 模型,稳定状态下基于局地相似理论计算波导高度的New 模型。西安电子科技大学刘成国等[13]提出了基于伪折射率和相似理论计算海上蒸发波导剖面的新方法。山东省海洋环境监测技术重点实验室漆随平等[14]对基于气象水文要素数据、卫星气象数据及气象数值模式等的波导探测方法进行了讨论。中国电波传播研究所马征征等[15]开展了激光雷达对悬空波导探测能力的仿真研究。对于表面和悬空波导的监测,西安电子科技大学郝晓静等[16]基于气象卫星数据对我国沿海悬空波导的反演方法进行了研究。国防科技大学张钜一等[17]基于全球定位系统(Global Positioning System,GPS) 探空数据对南海海域表面和悬空波导特征进行了分析。中国电波传播研究所张利军、王红光等基于船舶自动识别系统(Automatic Identification System,AIS) 信号和地基全球卫星导航系统(Global Navigation Satellite System,GNSS) 掩星信号进行了低空大气波导监测方法及试验分析[18-19]。
在大气波导监测设备方面,2000年以来,我国沿海建设了一定数量的气象观测铁塔,用于监测海面蒸发波导;2009年,船载蒸发波导探测系统和低空气象探测火箭装备的研制成功,实现了蒸发和表面的双波导监测;2020年之后,由大气波导观测站、海洋调查船和舰艇自主观测的波导信息监测网初步形成。近20年来,大气波导监测技术获得了显著发展,但基本都集中在蒸发波导的监测与应用,海洋表面和悬空波导的数据获取存在着缺失严重问题[20]。至今尚未完成蒸发波导、表面波导、悬空波导的一体化高时空分辨连续探测;大气波导监测设备在品种、数量、性能、质量上远远满足不了海上复杂电磁环境的实际需求[21]。
为满足全类型大气波导环境的探测与综合应用需求,针对原有大气波导监测技术手段单一、数据量少甚至缺失(表面波导、悬空波导) 的现状,本文基于拉曼激光雷达技术手段,解决了白天日光背景噪声和超低盲区全高程探测问题,实现了激光雷达的日夜全天候探测,完成了6~3000 m 全类型大气波导的高时空分辨连续探测,为后续实现全类型大气波导诊断分析、全类型大气波导数值预报、全类型大气波导传播预测等应用提供技术支持和数据基础。
1 基于拉曼激光雷达的大气温湿度廓线探测
当入射光与物质分子相互作用后,由于分子转动、振动和电子能级的跃迁,引起散射光频率发生变化,从而造成入射光与散射物质之间发生能量转移的光散射现象称为拉曼散射。散射光与入射光频率的差异,我们称之为拉曼频移,计算如下。
式中,Δv 为散射光与激发光频率之差;ΔE 为能级差;h 为普朗克常数;c 为光速。Δv 大小只与散射分子属性有关,与入射光频率无关[22]。因此,不同的物质居于不同的拉曼频移,同一种物质不同密度拉曼频移也不一样。基于这一原理,利用拉曼激光雷达技术进行大气温度和大气湿度的探测。
1.1 基于转动拉曼的大气温度廓线探测
转动拉曼激光雷达是利用大气中氮气分子和氧气分子的转动拉曼谱线强度与温度的关系来测量大气温度。大气转动拉曼谱线强度与大气温度密切相关,高、低量子数转动拉曼谱线的强度随温度的升高而分别增强和减弱,据此利用高低量子数拉曼散射信号来反演温度。由于转动拉曼光谱Stokes 支存在着荧光散射谱干扰,大气温度通常采用Anti-Stokes支拉曼谱线来反演[23]。发射激光波长λ0为354.7 nm,分别在300 K 和200 K 时氮气(N2) 的转动拉曼Anti-Stokes 谱线强度如图1 所示。从图中可以看出,拉曼散射是分布在激光频率两侧的一组不连续散射信号,不同的转动惯量有不同的散射强度。当选取固定的转动惯量,测量它对应的波长,就可以测得对应的转动拉曼散射强度信号,通过反演就可以得到对应的大气温度。

图1 氮气Anti-Stokes 转动拉曼散射强度分布图
设高低量子数转动拉曼散射信号的强度分别为P1(T,z)、P2(T,z),两者之比与温度有确定的关系[24]。
式中,T 为温度;z 为高度;n1(J,z)和n2(J,z)分别是高量子数转动拉曼后向散射的光子数和低量子数转动拉曼后向散射的光子数;A、B 是系统参数;T(z)为温度廓线。
温度廓线计算如下。
1.2 基于振动拉曼的大气湿度廓线探测
探测低空大气水汽廓线的拉曼激光雷达,通常使用两个通道。一个用于探测水汽分子的振动拉曼散射,另一个用于探测氮气分子的转动拉曼散射。由激光雷达接收到的水汽分子拉曼散射回波信号和氮气分子拉曼散射回波信号分别表示如下[25]。
式中,P(z,λH)、P(z,λN)分别为水汽和氮气的拉曼散射回波信号强度,是高度z 的函数;P0(λL)是在激光波长λL的输出功率;βH(z,λL)、βN(z,λL)分别是水汽和氮气的后向散射系数;η(λH)、η(λN)分别是水汽和氮气的激光雷达接收光学效率;α(z,λH)代表特定波长处由分子和气溶胶散射及吸收的总消光系数;O(z)为激光雷达几何重叠因子,表示接收镜视场与发射激光束的重合程度;τ 为拉曼谱线透过率。
水汽分子和氮气分子的后向散射系数见式(6)和式(7)。
式中,NH(z)是水汽数密度;NN(z)是氮气数密度;dσ(π)/dΩ 是差分散射截面,其中,下标H 表示水汽,下标N 表示氮气。
水汽信号和氮气信号相比,可得到式(8)。
式中,指数项表示大气透过率函数,可用Δτ(λH,λN,z)表示,于是有
从而,水汽混合比可写成式(10)。
式中,k*(z)=。
不同高度z 的水汽密度如下。
因此,只要确定了激光雷达系统标定常数k*和大气透过率修正函数△τ(λH,λN,z),就能够对大气中的水汽混合比进行精细探测。
同一温度下,空气相对湿度为实际水汽密度与饱和水汽密度之比,即
式中,NH(z)是水汽密度;SH(z)是饱和水汽密度,可由饱和水汽压e(t)得到。
式中,e(t)为饱和水汽压,单位:hPa;t 为温度,单位:℃。
从而,相对湿度RH(z)的高度分布见式(14)。
式中,t(z)为转动拉曼散射激光雷达测得的大气温度随高度分布。
2 全类型大气波导的诊断分析
蒸发波导是发生在海洋大气近海面层的特殊折射现象,它的高度和强度通常根据海洋近地层相似理论来计算得到。目前,国内外存在若干个蒸发波导诊断模型,如P-J 模型[26]、Babin 模型[27]、NPS 模型(Naval Postgraduate School Model)[28]、MGB模型(Musson-Gauthier-Bruth Model)[29]、伪折射率模型[30]等,但基本原理都是依赖近地层相似理论,只是用于确定近地层通量和特征尺度的方法不同。
表面和悬空波导的探测通常采用无线电探空法,其步骤为:①根据风向选定地点;②释放无线电探空设备;③实时采集探空数据计算不同高度的大气折射指数;④利用最小二乘方法拟合出大气折射指数随高度变化的廓线;⑤确定表面和悬空波导的高度、厚度、强度等特征参数。
2.1 全类型大气波导诊断模型的构建
由理想气体状态方程可知,大气密度是气压、气温、湿度的函数,因而大气折射指数也应是气压、气温、湿度的函数。对于微波波段,大气折射指数和大气修正折射指数公式如下。
式中,P 为大气压强;e 为水汽压强;T 为大气温度;a 为地球半径,取6378 km。
蒸发波导是由海水蒸发海气湍流扩散形成的,受海气界面微气象条件影响,蒸发波导一般不采用大气修正折射指数梯度来确定,通常根据近地层相似理论,利用海面水文气象要素的宏观测量值来诊断得出。
根据Monion-Obukhov 近地层相似理论[31],各物理属性量的垂直分布由湍流输送过程决定。
从而式(18)可以写成如下形式。
式中,T*、e*分别是温度和水汽压的Monin-Obukhov 特征尺度;ΦH、ΦV分别是温度和湿度的无量纲廓线函数,在海洋近地层内一般假设ΦH=ΦV。
由大气波导定义可知,当大气修正折射指数垂直梯度等于0 时,所对应的高度z 就是蒸发波导高度zd,因此
由式(21)可知,蒸发波导高度zd是由L、T*、e*、ΦH来确定的。通常依据LIU W 等[32]导出的关系式来计算T*、e*、ΦH与L。
式中,z0为海面粗糙度高度; ψH(z/L)可表示如下。
式中,ΦH可表示如下。
Monin-Obukhov 长度L 表示如下。
式中,u*=kVz/0.74[ln(z/z0)-ψM(z/L)],Vz为z 高度上的全风速;g 为重力加速度;T0为近地层平均气温。
式中,ΦM可表示如下。
依据以上公式可知,只要测量海面近地层任意两个高度的温度、湿度,以及某一高度的风速,就可以计算出T*、e*、ΦH与L,从而诊断出蒸发波导高度zd。
由于蒸发波导高度一般不超过海面50 m,因此全波导诊断模型构建如下。
2.2 全类型大气波导诊断案例及数据分析
利用拉曼激光雷达设备(图2),结合风速风向测量传感器(图3),进行边界层大气温度、湿度和海面风速的监测,并对数据进行计算分析,得到不同高度上的大气修正折射指数。基于全波导诊断模型,判定蒸发、表面和悬空波导的有无,并最终实现全波导诊断。

图2 拉曼激光雷达设备

图3 风速风向测量传感器
2021年10 月25 日20 时,在青岛利用拉曼激光雷达进行全波导探测,得到拉曼激光雷达大气温度廓线,与无线电探空仪实测数据对比分析如图4(a)所示,得到温度廓线平均误差为0.535 ℃,如图4(b)所示。拉曼激光雷达大气湿度廓线与无线电探空仪实测数据对比分析如图5(a)所示,得到水汽混合比廓线平均误差为0.1217 g/kg,如图5(b)所示。
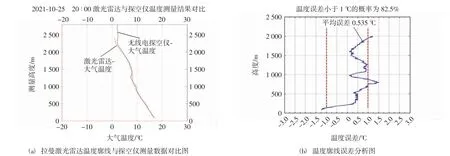
图4 拉曼激光雷达大气温度廓线与无线电探空仪实测数据对比图
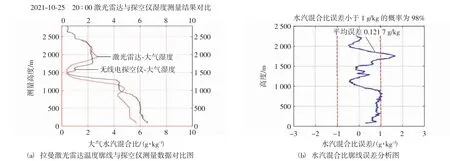
图5 拉曼激光雷达大气湿度廓线与无线电探空仪实测数据对比图
利用拉曼激光雷达探测数据,结合标准压高模型,计算不同高度的大气修正折射指数,进而诊断表面和悬空波导的高度、厚度和强度等,其中诊断结果与无线电探空仪实测结果对比如图6 所示。基于拉曼激光雷达底层大气温度、湿度,结合风速风向测量传感器数据,诊断得出蒸发波导,从而拟合出整个全波导的大气修正折射指数廓线如图7 所示。

图6 拉曼激光雷达与无线电探空仪实测大气修正折射指数廓线对比图

图7 全波导大气修正折射指数廓线图
通过对比拉曼激光雷达和无线电探空仪测量数据及全类型波导诊断结果,可以看出,拉曼激光雷达测量的大气温、湿度数据与探空仪数据吻合较好,且变化趋势基本一致;对于全类型波导的诊断,拉曼激光雷达结合风速风向传感器可以把近地层蒸发波导和低空的悬空波导诊断出来,诊断结果为蒸发波导高度10.96 m,蒸发波导强度为54.8 M;悬空波导底高1158 m,顶高1206 m,悬空波导厚度48 m,悬空波导强度1.5 M。而无线电探空仪只能诊断出悬空波导,诊断结果为悬空波导底高1220 m,顶高1262 m,悬空波导厚度42 m,悬空波导强度2.5 M,比拉曼激光雷达诊断的悬空波导高度略高。此外,利用拉曼激光雷达的连续探测数据,可以进一步分析大气波导特征量随时间的变化规律,如图8 所示。
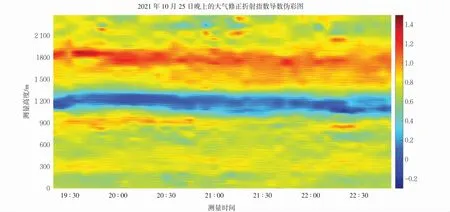
图8 基于拉曼激光雷达连续观测数据的大气修正折射指数梯度随时间变化图
3 结论
为实现全类型大气波导环境的监测,本文基于转动拉曼大气温度探测和振动拉曼大气湿度探测的原理,构建了全类型大气波导诊断模型;采用拉曼激光雷达新技术手段,完成了全类型大气波导的监测诊断。通过对比无线电探空仪的实测数据,得到如下结论。
(1) 利用大气中氮气分子和氧气分子转动拉曼谱线强度与温度的关系,建立了大气温度廓线反演算法,实现了海洋大气温度廓线的拉曼激光雷达实时诊断。
(2) 利用大气中水汽分子和氮气分子的振动拉曼散射,建立了大气湿度廓线反演算法,实现了海洋大气湿度廓线的拉曼激光雷达实时诊断。
(3) 拉曼激光雷达测量的大气温度、湿度廓线数据与无线电探空仪数据吻合较好,温度廓线平均误差为0.535 ℃,温度误差小于1 ℃的概率为82.5%;水汽混合比廓线平均误差为0.1217 g/kg,水汽混合比误差小于1 g/kg 的概率为90%。
(4) 利用拉曼激光雷达探测数据,结合近地层风速数据,实现了全类型大气波导环境的诊断;诊断结果与无线电探空数据比对得到,悬空波导高度诊断准确率为94.8%,悬空波导厚度诊断准确率为85.8%,悬空波导强度诊断准确率为60%。
(5) 基于拉曼激光雷达的连续探测数据,可以进一步分析大气波导高度、厚度等特征量随时间的变化规律。
本文解决了蒸发、表面和悬空3 种波导类型统一、精细化、连续监测的难题,为形成大气波导激光雷达监测设备奠定了技术基础。未来依托本文研究成果,可进一步研制大气波导激光雷达,替代目前使用的海上铁塔、探空火箭、系留汽艇、探空气球等大气波导监测产品,实现全类型大气波导的一体化、精细化、全天候监测,为我国不同区域大气波导统计分析、大气波导对电子设备性能影响研究和大气波导作战运用等提供数据支撑。
猜你喜欢
高原山地气象研究(2020年3期)2020-07-16 07:54:04
河北省科学院学报(2020年1期)2020-05-25 06:57:20
琴童(2018年2期)2018-03-06 16:36:52
成都信息工程大学学报(2017年3期)2017-11-09 02:56:24
学苑创造·A版(2017年8期)2017-06-24 18:06:48
电子制作(2016年15期)2017-01-15 13:39:11
光学精密工程(2016年6期)2016-11-07 09:08:12
电子制作(2016年11期)2016-11-07 08:43:34
成都信息工程大学学报(2016年6期)2016-06-01 12:10:06
制导与引信(2016年3期)2016-03-20 16:02:00