用于助推器伞降的多段分离技术方案设计与仿真
2023-03-20 02:55徐倩张涛赵文周啟航陈彬
航天返回与遥感 2023年1期
徐倩 张涛 赵文 周啟航 陈彬
用于助推器伞降的多段分离技术方案设计与仿真
徐倩 张涛 赵文 周啟航 陈彬
(北京宇航系统工程研究所,北京 100076)
助推器伞降落区控制需要解决的关键技术之一是将助推器从无控再入状态平稳可靠地转为伞降受控状态。助推器再入时处于高动态翻转运动,需要根据助推器的姿态变化特点对助推器头锥分离及开伞过程进行设计,确定合理的开伞条件,并使得头锥在极端姿态下可以顺利分离,为开伞创造开敞的空间并提供一定的初始拉出速度。为了突破该项技术难点,文章提出了头锥多段分离技术,首先对分离能源以及分离体的分段进行设计,使分离能源与分离体的质量和阻力特性相匹配;然后将头锥的多段分离过程与伞分系统的分级展开过程进行协同,充分利用伞的升力,使分离过程安全且连贯;对分离过程进行了数值仿真,并在CZ-3B火箭多发飞行任务中进行了成功应用,验证了多段分离技术的稳定性和可靠性。
助推器 降落伞 翼伞 多段分离 再入 方案设计
0 引言
为应对日益复杂的火箭残骸落区选取和管控问题,中国在“十三五”期间确定并实施了助推器伞降落区控制技术[1-2],该项技术结合当前热门的各种子级回收途径[3-4],可将结束工作后再入的助推器牵引至指定的落点区域,减少了落区风险和残骸搜寻的难度。

图1 Ariane 5助推器回收系统装配示意
美国航天飞机及欧洲Ariane 5火箭的助推器均使用伞降溅落方案(即助推器随降落伞溅落到海上)[5-6],此类方案是先将助推器头锥一次分离,然后多级伞逐级展开实现稳定和减速,其主要工作时序为:头锥分离、引导伞展开、减速伞展开、减速伞绳释放、辅助伞展开、主伞展开和海上溅落,溅落速度为25m/s左右。Ariane 5的助推器回收系统装配示意如图1[7-9]所示。头锥设计对接环连接,内置膨胀管和导爆索,分离时膨胀管工作破坏对接环实现连接解锁。分离能源由安装于头锥第一个环框的火工作动筒提供,可为头锥分离体提供27m/s的初速度[10]。根据Ariane 5头锥分离部分质量和分离速度估算,火工作动筒需提供的冲量约为6 000N·s。对比成熟火工品指标,要满足上述冲量要求,该火工作动筒的体积和质量与一枚药柱直径约130mm、长度约400mm的小型固体火箭发动机相当。即使将该火工作动筒分解为若干枚小型火工做动装置,其总的体积和质量规模也较为可观,对结构空间和承载都有较高的需求。为确保分离安全,回收系统的装配使用专门的夹具和导向工装,使伞舱安装适应头锥12°斜角[11],以尽可能保证头锥分离安全间隙。
对比Ariane 5火箭助推器伞降回收方案,中国提出的助推器伞降落区控制系统方案主要包括导航控制分系统、结构分系统和伞分系统[12]。其中,伞分系统安装于助推器头锥内,高动态翻转再入助推器的头锥分离技术是该系统的一项难点,要求在其工作前提供安装、支撑和热环境防护;待到具备开伞条件时,头锥分离系统为开伞创造开敞的空间,并为伞提供一定的初始拉出速度;在高动态翻转再入的姿态下,头锥须克服姿态干扰和气动力影响,实现可靠分离,并使各级伞顺利展开。
针对上述难点,本文提出一种与伞分系统分级展开协同工作的头锥多段分离技术方案,着重解决分离能源与分离体的质量和阻力特性的匹配问题,并充分发挥伞的姿态稳定作用,充分利用伞提供的升力解决分离能源需求问题。在该方案下首先弹出阻力面积和质量较小的端头帽,提供可靠的分离初始速度和姿态,并拉出体积较小的一级稳定伞;待稳定伞工作一定时间,将助推器姿态稳定后,再使尺寸和质量较大的头锥中段与稳定伞分离,并依次拉出后续减速伞及翼伞伞系,完成助推器减速和落点控制任务。
1 助推器伞降系统方案
1.1 结构布局
为了利于技术的直接应用和推广,中国在开展助推器伞降技术研究时[13],制定了搭载现役火箭飞行任务开展验证试验的策略[14-15]。依据总体设计中对箭体结构进行最小适应性更改的原则,在不影响火箭总体气动外形的条件下,将助推器伞降落区控制系统集中布局在助推器头锥内[16](如图2所示),形成紧凑且独立的功能系统,便于分离并提供开伞通路。

图2 助推器伞降落区控制系统布局
该布局中助推器头锥整体分成三层:最上层为端头帽,里面设计稳定伞支撑结构;中间层为减速伞和翼伞伞舱,其底板上集中布置归航控制系统和执行装置;最下层设计了较强的四腿支臂以更好地支撑上层设备,并在支臂之间布置了组合导航控制系统等。该布局方式充分利用了当前助推器头锥内整块的剩余空间;整个系统布局集中,可整体安装、更换到任何一枚助推器上;不同功能的分系统有相对明显的分界面,避免相互影响和工作交叉;各分系统分界面和分离面的设置统一,有利于分离过程的接口协调性。
1.2 头锥多段分离方案
助推器再入过程的高动态变化给头锥分离和开伞带来难度。为了确定合理的分离和开伞条件,首先在CZ-3B火箭飞行任务中搭载姿态测量装置[17],以获取助推器再入过程中的姿态变化特征。测量结果表明,助推器分离时处于横向高速旋转状态,不利于实施头锥分离和开伞。当返回稠密大气层后,由于发动机较重,整体重心偏下,高动态过程中基本呈头部向上姿态。通过搭载姿态测量装置对助推器再入姿态进行实测,从起飞到再入后几个典型方向的姿态角速度变化如图3(a)~(c)所示,助推分离后的姿态角如图3(d)所示。再入过程中姿态角速度高达300(°)/s,再入姿态角达200°。由于助推器本身的气动特性,进入大气层一定时间后,滚转、偏航和俯仰方向的姿态角速度分别收敛到150(°)/s、100(°)/s和80(°)/s,但仍为高动态状态[18]。上述姿态角速度取值即为头锥分离和开伞的初始条件。通过气压计对开伞高度进行控制,气压计采取冗余设计,基于气压计工作原理和测量精度[19],可以得到较为准确的飞行高度,确保在满足上述姿态角速度取值时执行分离和开伞动作。

图3 助推器再入过程各向姿态角和角速度曲线
由于开伞需要充气,因此该动作需要在进入大气层以后进行,此时,头锥分离还受到气动力干扰。气动力和高姿态变化相耦合,给分离过程带来极大的不确定性。为实现可靠分离,本文提出先将阻力面积较小、质量较小的端头帽弹出的方案。该方案下,当端头帽弹出时便拉出稳定伞,可以对助推器姿态进行稳定,提高头锥主体(头锥中段)结构分离的可靠性。头锥多段分离和伞系展开过程如图4所示。

图4 头锥多段分离与伞系展开过程
头锥多段分离与伞系展开过程主要包括以下几个阶段:1)端头帽分离,拉稳定伞伞包,拉出稳定伞;2)稳定伞充气展开,稳定助推器姿态;3)头锥中段分离,头锥中段随稳定伞飞离助推器主体,拉减速伞伞包使减速伞拉出;4)减速伞充气展开,降低助推器速度;5)减速伞脱钩,拉翼伞伞包使翼伞拉出;6)翼伞充气展开,归航控制助推器。
上述头锥多段分离的特点归结如下:1)端头帽质量小,阻力面积小,因此启动能源需求小,通过环向密布的小型弹射装置,可以获得稳定的初始速度,弹出姿态偏差较小,为稳定伞展开提供优越的条件;2)头锥中段的分离时机根据稳定伞的稳定效果进行选取,当姿态变化控制在一定范围时,即可解锁连接头锥中段的火工装置;3)头锥中段的分离力由稳定伞的拉力提供,由于稳定伞拉力可带动整个助推器,因此对于头锥中段而言,分离力足够,即可快速将头锥中段拔出;4)伞的拉力可为结构提供分离能源,因此无需另行设置分离能源,不但简化分离系统,还增加了安全间隙,节省了安装空间;5)结构分离的同时拉出各级伞的伞包,可确保各级伞按顺序展开。
由于端头帽质量较小,气动阻力较小,初步估算分离能源所需提供的总冲量仅为700N·s,可通过密布多枚小型弹射器实现,无需对现有端头帽连接框做加宽和加强设计。
2 头锥多段分离过程仿真计算
2.1 端头帽分离
首先根据伞分系统开伞动量需求,提出端头帽弹射速度要求,再根据弹射器性能和端头帽质量,确定所需弹射器数量。在仿真建模时,将弹射器作用过程简化为平均推力(根据图5所示的弹射器典型的弹射力曲线推算)在分离体之间作用一段时间,给予分离体一定的分离初速度。端头帽的理论相对速度可以通过动量定理计算得到,然后据此简化计算分离体的气动阻力。
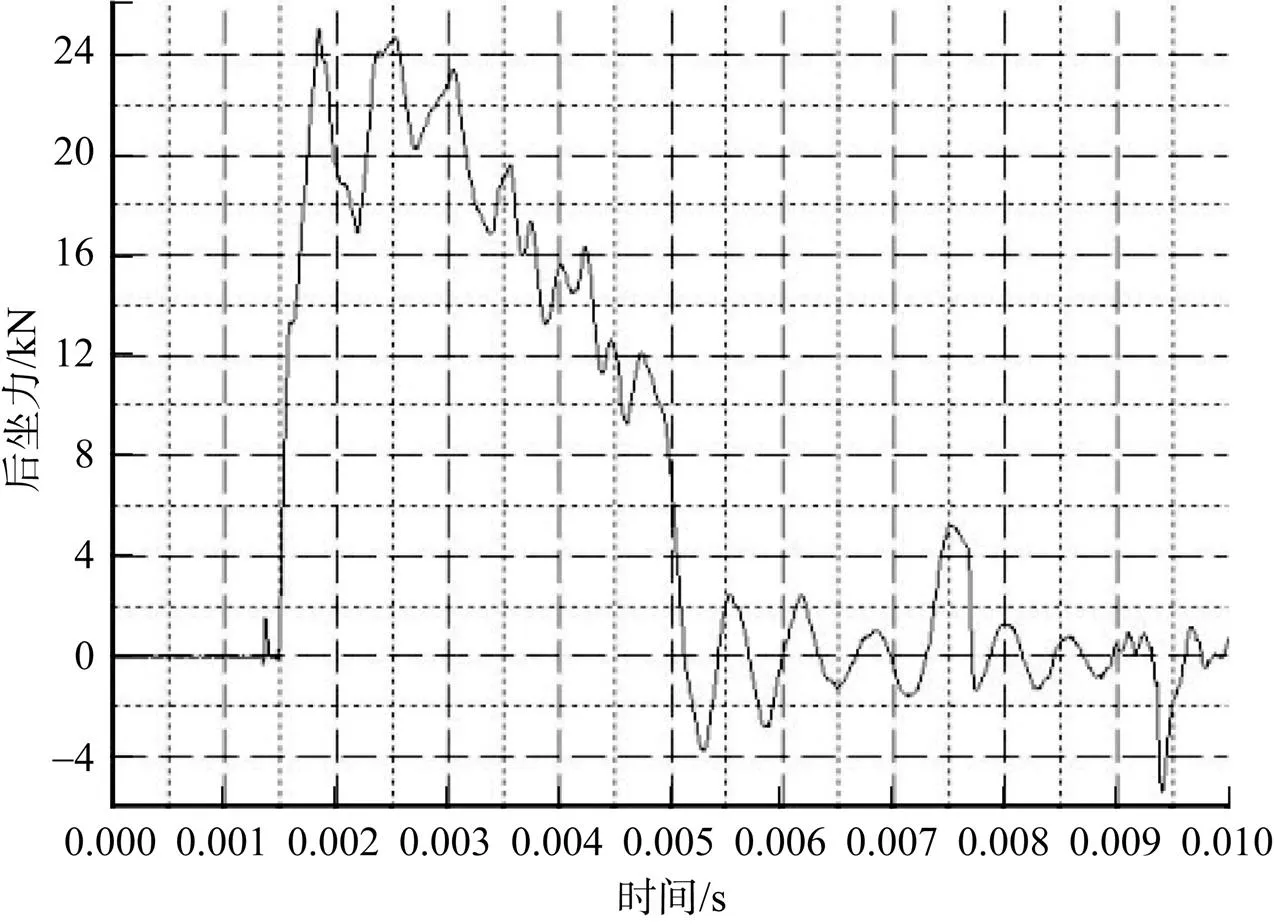
图5 弹射器的典型弹射力曲线
e=(t)/(1)
式中为弹射器数量;t为单个弹射器平均推力;为弹射器作用时间;为端头帽质量;e为端头帽理论分离相对速度。
为了确定分离能源与分离体的质量和阻力面积相匹配,确保在极限恶劣姿态下端头帽仍能成功分离,并提供稳定伞拉出所需的初速度。考虑两种极限工况(工况1和2),分别是助推器纵轴与飞行方向相同和垂直的两种状态。
(1)工况1



式(3)中除端头帽分离速度e外其余参数取值同式(2),端头帽分离速度实际上是随时间变化,为简化计算直接取端头帽理论分离速度e。
(2)工况2
助推器纵轴与飞行方向垂直时,助推器头锥端头帽受力示意见图6(b)。该工况下气动阻力 的作用方向与工况1不同,数值上除a1不同外,重力、弹射力及助推器气动阻力均与工况1数值一致。

图6 两工况下端头帽受力示意
建立分离计算模型(如图7所示),模型中按照姿态测量结果给定分离体的初始姿态角速度,并对端头帽和助推器剩余部分赋予质量特性(包括质量、质心、绕横轴及绕纵轴的转动惯量)。对两种极限工况的标称参数和极限偏差分别予以仿真计算,其中极限偏差工况考虑质心偏差、弹射器推力及作用时间的不同步性等因素。对弹射器的数量、布局及推力参数进行迭代设计,并通过仿真验证在弹射器的偏差性能指标范围内,端头帽可以平稳弹出,不会发生翻转,且最小弹出速度满足稳定伞伞包拉出的要求。

图7 端头帽分离仿真模型
2.2 稳定伞工作段
稳定伞工作段包括稳定伞充气展开和全展开两个阶段。通过仿真[20]和实测数据表明,稳定伞工作一段时间即可将助推器姿态角速度收敛到20(°)/s以内(见图8(a)),姿态角(180°–)收敛到20°以内(攻角收敛曲线见图8(b)),助推器基本处于头朝上的直立状态,为头锥中段分离创造了良好的初始条件。

图8 稳定伞工作阶段助推器姿态变化
2.3 头锥中段分离
稳定伞与头锥中段通过4个吊点连接,头锥中段分离为头锥第二次分离,将包围伞舱的结构壳体随稳定伞带出,可为减速伞和翼伞开伞创造更为开敞的空间,确保开伞过程中无剐蹭。头锥中段的质量和体积相对端头帽大很多,需要更大的分离能源。但由于稳定伞的气动升力大于头锥中段重力,因此可将稳定伞的升力作为头锥中段的分离能源。仅需在满足指定姿态条件时实现头锥中段的连接解锁,随后稳定伞将头锥中段拉出。稳定伞全展开时拉力稳定,由于4根伞绳斜拉助推器,分离计算时轴向拉力取l,并考虑径向拉力分量r。根据稳定伞工作段姿态稳定效果,在进行分离过程的有关计算和分析时考虑助推器在20°攻角下的受力情况。
头锥中段受力情况如图9所示。图9中,m为头锥中段重力,a3为助推器下降过程中头锥中段受到的气动阻力,a4为头锥中段分离的气动阻力,计算方法同式(3)。
头锥中段分离计算模型如图10所示,模型中按照稳定伞工作效果,分离体在滚转、俯仰和偏航方向的初始姿态角速度分别取30(°)/s、20(°)/s、20(°)/s,并对头锥中段和助推器剩余部分赋予质量特性。为实现头锥中段从伞分系统上的安全拔出,重点考察分离过程的安全间隙问题。头锥中段分离过程中其与剩余部分的最小间隙变化情况如图11所示,可以看出,分离过程中分离间隙呈递增趋势,头锥中段与剩余部分不会发生磕碰。头锥拔出时的仿真图像如图12所示,可安全拔出。

图9 头锥中段受力示意
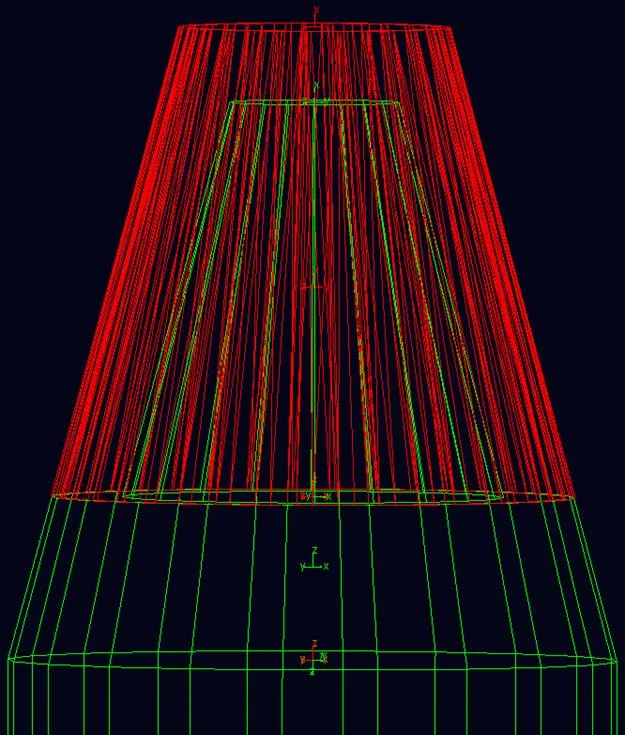
图10 头锥中段分离仿真模型

图11 头锥中段分离间隙
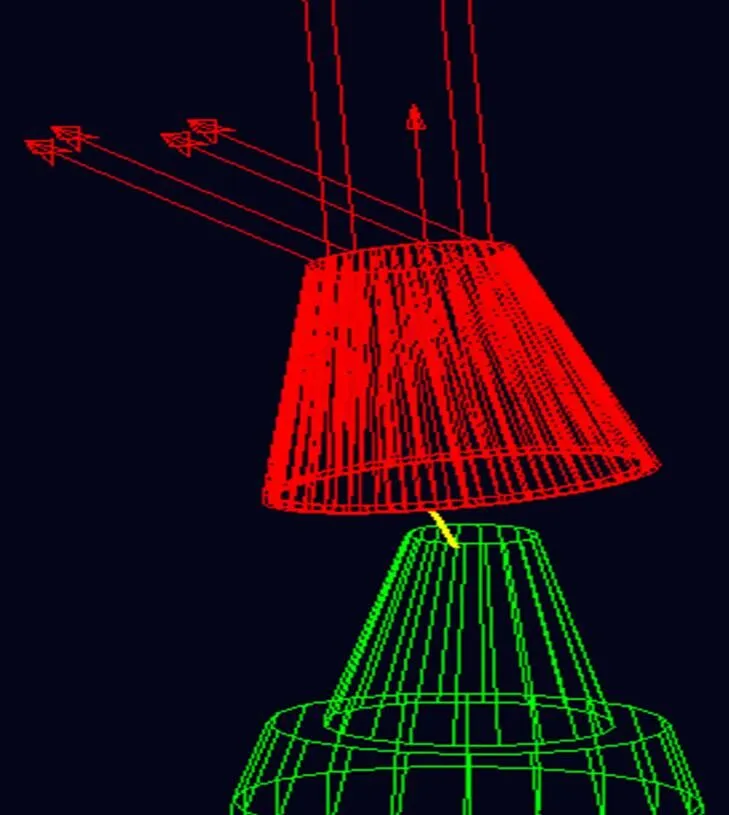
Fig.12 Mid head-cone separated safely
图12 头锥中段安全拔出
2.4 减速伞工作段
减速伞工作段包括减速伞充气展开和全展开两个工作阶段,助推器运动如图13所示。观察图13可以发现,减速伞充气展开过程中助推器姿态角速度有短暂的增加,但减速伞全展开后迅速收敛至0(°)/s 左右。与此同时,助推器横向速度降低至5m/s左右,轴向速度降幅明显,由100m/s降低至35m/s左右,表明助推器姿态处于可控范围之内,为减速伞脱钩及翼伞开伞创造了良好的条件[21-22]。

图13 减速伞工作阶段助推器运动
3 结束语
本文简要介绍了国外助推器伞降方案和分离技术,给出了中国助推器伞降落区控制的分离和开伞解决方案;针对再入助推器姿态高动态变化带来的技术难题,提出了助推器头锥多段分离技术,与伞分系统逐级开伞过程协同工作,确保了各项动作的初始条件和技术要求易于满足,保障了各次分离和开伞过程的可靠性和安全性。多段分离技术还具备结构更改较小、完全不改变助推器气动外形、空间利用率高和分离能源简单等优势。仿真分析和多次飞行试验结果表明,用于助推器伞降的多段分离技术稳定可靠。
[1] 田继超, 宋强, 洪刚, 等. 常规运载火箭解决落区安全问题的方法[J]. 航空学报, 2018, 39(增刊1): 722302-722302.
TIAN Jichao, SONG Qiang, HONG Gang, et al. Solutions for Impact Zone Safety Issue of Conventional Rockets[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(S1): 722302-722302. (in Chinese).
[2] 李聃. 运载火箭助推器可控安全回收技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
LI Dan. Research on Controlled Safety Recovery Technology for Launch Vehicle Booster[D]. Harbin: Harbin Institute of Technology, 2016. (in Chinese).
[3] 王小军. 中国航天运输系统未来发展展望[J]. 导弹与航天运载技术, 2021(1): 1-6.
WANG Xiaojun. Future Development of Space Transportation System of China[J]. Missile and Space Vehicle, 2021(1): 1-6. (in Chinese).
[4] 牟宇, 孙冀伟, 秦旭东. 猎鹰9火箭Block5构型首次飞行任务解析[J]. 宇航总体技术, 2018, 2(5): 1-7.
MOU Yu, SUN Jiwei, QIN Xudong. The Analysis of Falcon 9 Block5’s Maiden Flight[J]. Astronautical Systems Engineering Technology, 2018, 2(5): 1-7. (in Chinese).
[5] 冯韶伟, 马忠辉, 吴义田, 等. 国外运载火箭可重复使用关键技术综述[J]. 导弹与航天运载技术, 2014(5): 82-86.
FENG Shaowei, MA Zhonghui, WU Yitian, et al. Survey and Review on Key Technologies of Reusable Launch Vehicle Abroad[J]. Missiles and Space Vehicles, 2014(5): 82-86. (in Chinese).
[6] MEIBOOM F P, GEERDES J. Qualification of the Ariane-5 Booster Recovery System[C]//13th Aerodynamic Decelerator Systems Technology Conference, 15-18 May 1995. Clearwater Beach, FL, U.S.A.: AIAA, 1995.
[7] RVSEV O, ANDRONOV R. Methodology of the Design and Development of Ariane-5 Booster Recovery System[C]// 13th Aerodynamic Decelerator Systems Technology Conference, 15-18 May 1995. Clearwater Beach, FL, U.S.A.: AIAA, 1995.
[8] MEIBOOM F P. Design and Development of the Recovery System for the Ariane-5 Boosters[C]//11th Aerodynamic Decelerator Systems Technology Conference, 9-11 April, 1991. San Diego, CA, U.S.A: AIAA, 1991.
[9] JUST H. Ariane-5 Booster Recovery System “Description of the Parachute Assembly and the Test Philosophy” [C]// 11th Aerodynamic Decelerator Systems Technology Conference, 9-11 April, 1991. San Diego, CA, U.S.A: AIAA, 1991.
[10] 赵祖虎. 阿里安助推器回收系统[J]. 航天返回与遥感, 1996, 17(4): 1-7.
ZHAO Zuhu. Ariane-5 Booster Recovery System[J]. Spacecraft Recovery & Remote Sensing, 1996, 17(4): 1-7. (in Chinese).
[11] BOS M J, NIENKEMPER R L, MEIBOOM F P. Development of the Nosecone Separation System for the Ariane-5 Booster Recovery System[C]//13th Aerodynamic Decelerator Systems Technology Conference, 15-18 May 1995. Clearwater Beach, FL, U.S.A.: AIAA, 1995.
[12] 张涛, 徐倩, 李聃, 等. 基于大型翼伞可控回收的箭体结构与分离方案设计[J]. 导弹与航天运载技术, 2020, 6(2): 11-15.
ZHANG Tao, XU Qian, LI Dan, et al. Launch Vehicle Structure Design and Separation Technology Based on Controllable Recovery Using Large-scale Parachute System[J]. Missile and Space Vehicle, 2020, 6(2): 11-15. (in Chinese).
[13] 王立武, 许望晶, 刘涛, 等. 航天器翼伞精确回收技术发展及展望[J]. 航天返回与遥感, 2020, 41(4): 21-30.
WANG Liwu, XU Wangjing, LIU Tao, et al. Development and Propspect of Parafoil Precise Recovery Technology for Spacecraft[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(4): 21-30. (in Chinese).
[14] 何青松, 王立武, 王寒冰, 等. 航天器海上伞降回收技术发展与展望[J]. 航天器工程, 2021, 30(4): 124-133.
HE Qingsong, WANG Liwu, WANG Hanbing, et al. Spacecraft Parachute Offshore Recovery Development and Prospect[J]. Spacecraft Engineering, 2021, 30(4): 124-133. (in Chinese).
[15] 陈志会, 宁雷, 王鹏, 等. 运载火箭助推器回收技术分析与启示[J]. 宇航总体技术, 2021, 5(5): 66-74.
CHEN Zhihui, NING Lei, WANG Peng, et al. The Development of Launch Vehicle Booster Recovery Technology[J]. Astronautical Systems Engineering Technology, 2021, 5(5): 66-74. (in Chinese).
[16] 徐倩, 郭凤明, 苏玲, 等. 运载火箭助推器伞控回收方案及安全性分析[J]. 宇航总体技术, 2017, 1(3): 9-15.
XU Qian, GUO Fengming, SU Ling, et al. Re-covering Scheme of Launch Vehicle Boosters Using Steerable Parachutes and the Safety Study[J]. Astronautical Systems Engineering Technology, 2017, 1(3): 9-15. (in Chinese).
[17] 李炳臻, 李杰, 胡陈君, 等. 基于FPGA+DSP的弹载组合导航系统设计[J]. 电子器件, 2021, 44(3): 547-553.
LI Bingzhen, LI Jie, HU Chenjun, et al. Design of Missile-Borne Intergrated Navigation System Based on FPGA+DSP[J]. Chinese Journal of Electron Devices, 2021, 44(3): 547-553. (in Chinese).
[18] 陈彬, 邓舞燕, 高家一. 运载火箭助推器再入姿态稳定性研究[J]. 导弹与航天运载技术, 2015(3): 13-15.
CHEN Bin, DENG Wuyan, GAO Jiayi. Research on Reentry Attitude Stability of Boosters[J]. Missile and Space Vehicle, 2015(3): 13-15. (in Chinese).
[19] 殷德全. 天文和气压辅助的惯性/北斗紧组合导航系统关键技术研究[D]. 南京: 南京航空航天大学, 2018.
YIN Dequan. Research on Key Techniques of SINS/BDS Integrated Navigation System with Astronomy and Pressure Assisted[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018. (in Chinese)
[20] 熊宇超, 张红英, 陈建平, 等. 火箭助推器回收稳定减速阶段动力学仿真分析[J]. 飞行力学, 2021, 39(5): 63-70.
XIONG Yuchao, ZHANG Hongying, CHEN Jianping, et al. Dynamical Simulation Analysis on Stabilization and Deceleration Stage of Rocket Booster Recovery[J]. Flight Dynamics, 2021, 39(5): 63-70. (in Chinese).
[21] 蒋万松, 荣伟, 滕海山, 等. 火箭助推器翼伞回收动力学仿真与试验分析[J]. 航天返回与遥感, 2017, 38(3): 13-23.
JIANG Wansong, RONG Wei, TENG Haishan, et al. Dynamical Simulation and Test Analysis for Booster Recovery with Parafoil System[J]. Spacecraft Recovery & Remote Sensing, 2017, 38(3): 13-23. (in Chinese).
[22] 续荣华, 王震, 黄及水, 等. 上翼面开缝的翼伞翼型气动特性研究[J]. 航天返回与遥感, 2022, 43(3): 1-11.
XU Ronghua, WANG Zhen, HUANG Jishui, et al. Aerodynamic Performance Study on a Parafoil Airfoil with an Upper Surface Slit[J]. Spacecraft Recovery & Remote Sensing, 2022, 43(3): 1-11. (in Chinese).
Design and Simulation of Multi-segment Separation Technology Scheme for Booster Parachute
XU Qian ZHANG Tao ZHAO Wen ZHOU Qihang CHEN Bin
(Beijing Institute of Astronautical System Engineering, Beijing 100076, China)
One of the key technologies to be solved in the control of the parachute drop area of the booster is to smoothly and reliably transfer the booster from the uncontrolled reentry state to the parachute controlled state. The booster is in a highly dynamic overturning motion during reentry. It is necessary to design the separation of the booster nose cone and the parachute opening process according to the attitude change characteristics of the booster, and determine the reasonable parachute opening conditions, and make sure the nose cone can be separated smoothly under extreme posture, at the same time create an open space for opening the parachute and provide a certain initial pull-out speed. In order to break through the technical difficulties above, the paper proposes a multi-segment separation technology of the nose cone. First, the separation energy and the segmentation of the separation body are designed to match the quality and resistance characteristics; then the multi-segment separation process of the nose cone is coordinated with the staged unfolding process of the parachute separation system to make full use of the parachute lift and make the separation process safe and consistent. The separation process is numerically simulated and successfully applied in several CZ-3B rocket launch missions, which verifies the stability and reliability of the multi-segment separation technology proposed in this paper.
booster; parachute; parafoil; multi-segments separation; reentry; scheme design
V525
A
1009-8518(2023)01-0084-09
10.3969/j.issn.1009-8518.2023.01.009
2022-05-12
“十三五”国家民用航天预研基金(D020303);装备预先研究(513201104)
徐倩, 张涛, 赵文, 等. 用于助推器伞降的多段分离技术方案设计与仿真[J]. 航天返回与遥感, 2023, 44(1): 84-92.
XU Qian, ZHANG Tao, ZHAO Wen, et al. Design and Simulation of Multi-segment Separation Technology Scheme for Booster Parachute[J]. Spacecraft Recovery & Remote Sensing, 2023, 44(1): 84-92. (in Chinese)
徐倩,女,1985年生,2014年获慕尼黑工业大学结构轻量化专业博士学位,高级工程师。研究方向为飞行器结构设计。E-mail:18911848750@189.cn。
(编辑:夏淑密)
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
家庭科学·新健康(2022年2期)2022-03-07
军事文摘(2021年16期)2021-11-05
矿产勘查(2020年11期)2020-12-25
考试周刊(2018年15期)2018-01-21
疯狂英语·新策略(2017年8期)2017-05-31
兵器知识(2017年2期)2017-02-21
海军航空大学学报(2015年4期)2015-02-27
中华肩肘外科电子杂志(2015年2期)2015-01-22
教练机(2011年3期)2011-01-14