
智能网联汽车热带测试场景研究
2023-03-18 01:54程思博王宣锋林俊山
汽车文摘 2023年3期
程思博 王宣锋 林俊山
(海南热带汽车试验有限公司,琼海 571400)
主题词:智能网联汽车 测试 热带场景 环境
1 前言
国内智能网联汽车测试示范区测试场景趋同性较高,多集中于研发功能阶段的常规测试。智能驾驶功能测试场景大部分基于较基本的道路类型、最常见的道路交通标线标识和常规的车辆行驶状态,主要目的是为了保障智能驾驶车辆的基本行驶功能。目前,汽车行业还没有提出针对复杂气候条件下的智能网联汽车测试方法,智能网联汽车在复杂气候环境中的行驶可靠性还存在很大的不确定性。智能网联汽车在实际公开道路行驶过程中面对的工况非常复杂,当前智能驾驶商业化落地和安全运行,必须要进行全面、大规模的严格测试。
2 国内外智能网联汽车环境测试发展现状
2.1 国内智能网联汽车环境测试现状
2020 年12 月,中国智能网联汽车产业创新联盟发布了《智能网联汽车预期功能安全场景库建设报告》[1]。报告首次对自动驾驶的关键要素,如感知、决策和执行分别受到的环境因素影响进行了分类,并提出了提升安全性的建议。
2022 年11 月,中国智能网联汽车产业创新联盟发布了《智能网联汽车特殊环境自动驾驶功能场地试验方法及要求》[2]征求意见稿,现面向全体会员及其他有关单位广泛征求意见。自动驾驶汽车在商业化落地运行之前,需要经过大量的测试验证和算法更新迭代。目前,工业和信息化部发布了《智能网联汽车 自动驾驶功能场地试验方法及要求》[3]标准,规范了普通环境下自动驾驶场地测试的试验场景、试验方法及通过标准,但该标准没有对特殊环境下的自动驾驶功能测试提出规范性要求。未来,随着自动驾驶技术不断发展与成熟,特殊环境下的自动驾驶测试是自动驾驶大规模商业化所必经的阶段。国内特殊环境测试领域规范和标准几乎处于空白状态,因此,汽车行业对于在特殊环境下的自动驾驶指导性测试标准的需求也较为紧迫。《智能网联汽车特殊环境自动驾驶功能场地试验方法及要求》[2]着眼于国内复杂的特殊环境,重点提出对智能网联汽车影响较大的低温、冰雪、热带气候和山地丘陵环境下的测试方法及要求。
2.2 国外智能网联汽车环境测试现状
国外智能网联汽车特殊环境测试场景的研究机构主要集中在美国、新加坡和欧盟。美国具备智能网联汽车环境测试条件以及进行相关研究的机构,包括美国交通部、美国国家航空航天局肯尼迪航天中心、美国移动中心、爱荷华大学国家先进驾驶模拟中心、美国密歇根州立大学M-City 自动驾驶测试中心。新加坡大力发展智慧城市和智能交通,新加坡CETRAN智能车测试中心对特殊环境测试场景进行了大量研究。欧盟也有很多机构,比如瑞典AstaZero、德国联邦经济事务和能源部推动的PEGASUS 联合项目进行了大量的测试场景研究。
美国交通部在美国9 个州指定了10 个自动驾驶试点试验场,分布于美国东西部各个纬度。这些分布在美国不同纬度的自动驾驶试点试验场具有不同的气候条件和地理特征,使智能网联汽车可以在更加丰富的环境条件下开展测试。
美国国家航空航天局肯尼迪航天中心具备人工控制的可变环境模拟设备,以及宽广的测试道路网络,可以对智能网联汽车进行特殊环境测试,比如模拟极端气候和异常的交通路况。
美国移动中心的试验场拥有丰富的气候测试环境(包括冰雪天气),且面积约为美国密歇根州立大学M-City 自动驾驶测试中心的10 倍。试验场内拥有双层高架公路、铁路道口、混凝土基础路面、制造结冰和湿滑路面的水塔,这些公共基础设施可以灵活搭配使用。
爱荷华大学国家先进驾驶模拟中心拥有全美国最大、设施最昂贵的模拟试验场,且其在汽车安全、计算机模拟和建模研究领域处于国际领先地位。爱荷华大学试验场内可进行各种人为因素的测试和高度可定制化的虚拟环境测试,且爱荷华地区具备各类真实动态的测试元素,包括各种天气、地形和路面条件,可在整个地区进行真实道路测试。
美国密歇根州立大学M-City 自动驾驶测试中心就气候环境对于智能网联汽车感知模块的影响做了相关的研究。最新的研究结果表明[4],在雨雾环境中,小雨或者毛毛细雨都会影响感知系统检测道路参与者的算法。这说明自动驾驶的算法如果不能很好地处理各种气候环境条件,智能网联汽车运行只能局限在阳光合适的天气。如果气候环境低于自动驾驶系统临界标准时,需要人工接管车辆。自动驾驶测试中心的研究人员研究了雨雾环境的各种参数,包括雨滴大小、雨滴密度、风速和降雨量,发现当降雨强度达到其最高级别10%的时候,自动驾驶算法会漏检约20%的物体。当降雨强度达到其最高级别30%的时候,自动驾驶算法会漏检约40%的物体。
新加坡CETRAN 智能车测试中心由新加坡国家陆路运输管理局、新加坡南洋理工大学共同成立,是东南亚地区第一个自动驾驶测试中心。测试中心内具有模拟降雨设备,可以模拟热带降雨和积水情况,可以针对性地模拟出新加坡周边地区的气候环境。热带地区的降雨具有突然性且雨量较大,经常短时间内导致道路深度积水,而自动驾驶感知系统在检测积水和积水深度方面比较困难。下雨时,雨滴会分别吸收激光雷达和毫米波雷达产生的激光束和无线电波,导致信号衰减。不均匀降雨形成的雨柱还可能会反射这些信号,导致车辆误识别率升高。为了更深入、更全面测试恶劣天气下智能网联汽车,新加坡CETRAN智能车测试中心谋求与美国密歇根州的美国移动中心等试验场进行合作。
由联邦经济事务和能源部推动的PEGASUS 联合项目,汇集了德国汽车企业、供应商以及研究机构。该项目将制定一个用于自动驾驶功能的通用标准化测试程序框架。该框架内部的功能场景模型中既包含了传统的测试要素,还将环境要素加入到了框架模型当中,使得环境要素成为了测试场景中重要的组成部分。
3 热带测试场景建设的必要性
3.1 行业发展需要
智能网联汽车是汽车产业发展的战略方向,是汽车强国战略的重要组成部分。首先,在技术层面上,汽车正在由人工操作的机械移动工具逐渐向电子化的移动信息终端演进。其次,在产业层面上,汽车的集成化程度越来越高,产业交叉程度越来越深,呈现出绿色化、智能化、网联化、平台化的发展特点。最后,在应用层面上,汽车正在由单纯的交通运输工具演变为智能的移动服务空间,正在成为新产业链、新模式的重要载体。智能网联汽车大规模商业化落地,离不开大规模的环境适应性测试,以验证其功能的可靠性。而热带环境适应性测试是环境适应性测试的重要一环,其结果体现了智能网联汽车所能达到的环境极限,代表了智能网联汽车行驶空间域的广度。为了规范化、体系化和结构化地对智能网联汽车进行热带环境适应性测试,有必要建设智能网联汽车热带测试场景。
3.2 政策指引
为加快推进智能汽车创新发展,国家各部委和相关部门陆续发布了《智能网联汽车道路测试与示范应用管理规范(试行)》[5]、《智能汽车创新发展战略》[6]、《汽车驾驶自动化分级》[7]、《2020年智能网联汽车标准化工作要点》[8]、《关于推动交通运输领域新型基础设施建设的指导意见》[9]、《车联网路侧设施设置指南》[10]、《关于促进道路交通自动驾驶技术发展和应用的指导意见》[11]等国家级战略和政策,为营造更好的测试示范环境,为智能网联汽车产业生态健康发展提供助力。其中2021年9月施行的《智能网联汽车道路测试与示范应用管理规范》[5]中指出,一般性的测试场景做过一次后便可在全国通认测试结果,但是对于地区性特色的测试场景,则需要单独进行测试。《智能网联汽车道路测试与示范应用管理规范》[5]的发布引导各地区发掘自身的区域特色环境测试场景,因此智能网联汽车热带测试场景建设是响应国家最新政策、促进智能网联汽车发展的重要举措。
4 热带测试场景的整体结构
4.1 自动驾驶场景分层模型
参考德国PEGASUS项目的场景分类体系,自动驾驶场景一般分为道路、交通设施及路边环境、临时交通变化、交通参与者、气候环境条件和数字信息6个层次[12]。本文主要针对其中的第2层植被状况、第4层交通参与者、第5层气候环境条件进行热带环境特征要素的探索和研究。自动驾驶场景分层模型结合热带环境特征要素,可以定义一个自动驾驶热带测试场景(表1)。

表1 智能驾驶场景分层模型
4.2 热带环境特征要素
海南地处热带,不仅有热带的气候特征,还有独特的岛屿交通特征和植被特征。因此,可以把热带环境特征要素分为气候、交通和植被要素。通过收集整理这3特征要素的实际数据,可以初步构建自动驾驶热带测试场景,探索热带环境特征要素对于汽车自动驾驶功能的实际影响。
可以把热带环境特征要素划分成更多的可能影响自动驾驶功能的环境因素子项目,整理和归纳这些环境因素数据(表2),用于自动驾驶热带测试场景构建的理论数据支撑:

表2 气候交通环境因素对于智能汽车自动驾驶要素的影响
(1)气候特征要素:
气候特征要素包含:光照、降雨、盐度、湿度、温度。
(2)交通特征要素:
交通特征要素包含:道路特征和交通参与者特征。交通参与者特征分为城市城区道路参与者特征和城镇道路参与者特征。
(3)植被特征要素:
植被特征要素包含:城市道路路旁植被种类和城市道路旁的植被情况。
4.3 海南热带气候特征
4.3.1 湿度全国主要城市20年的统计数据中,海南试验场的平均相对湿度高于全国各主要地区(图1)。
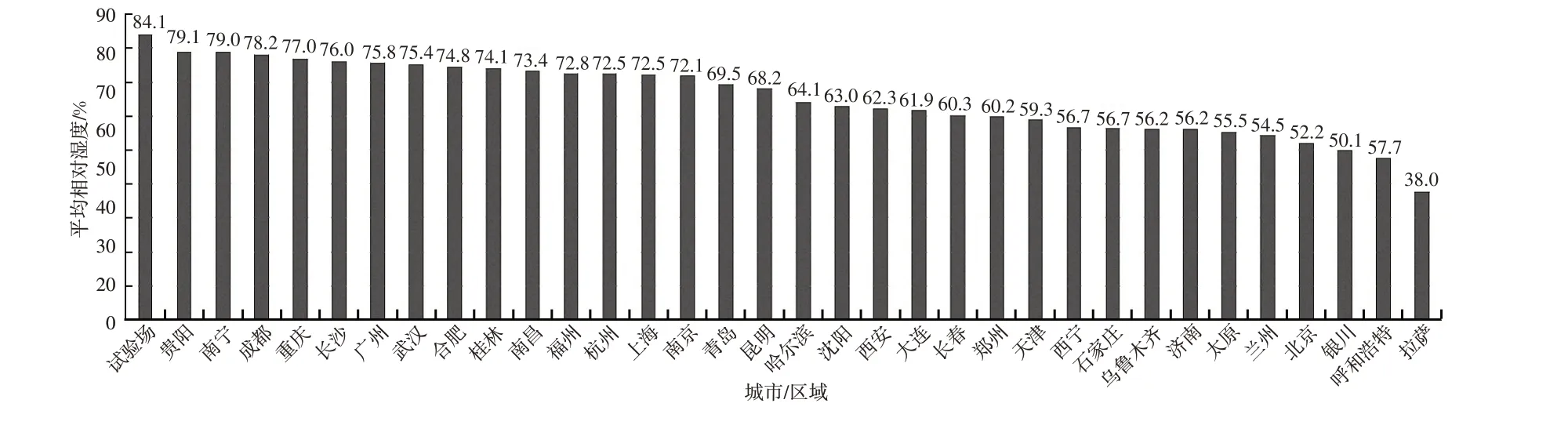
图1 全国主要城市20年平均相对湿度[13]
4.3.2 温度全国主要城市20年的统计数据中,海南试验场的平均温度高于全国各主要地区(图2)。
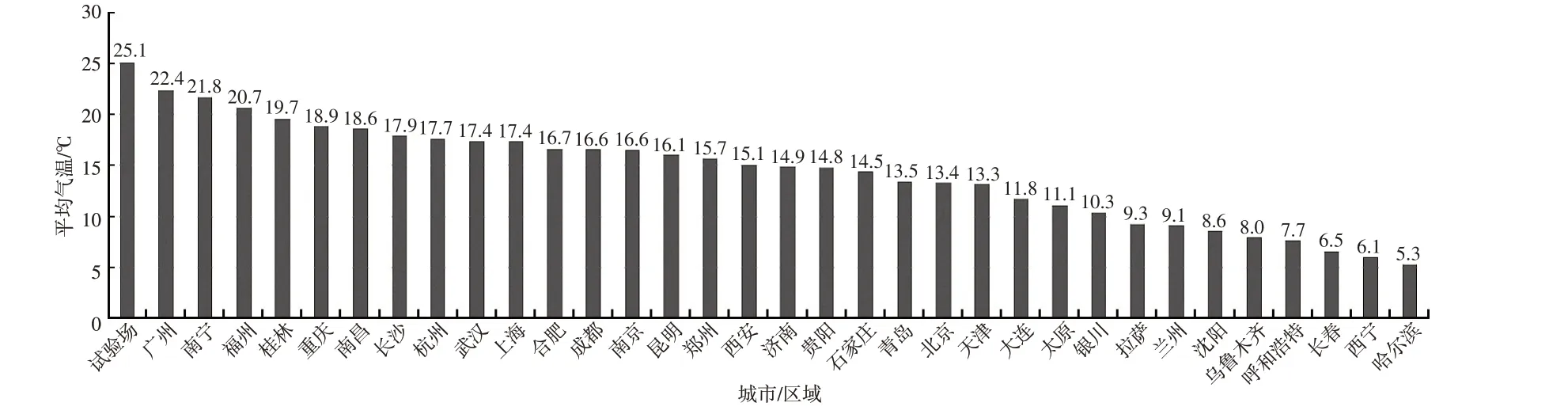
图2 全国主要城市20年平均气温[13]
4.3.3 降雨
全国主要城市18年的统计数据中,琼海的降水总量高于全国各主要地区(图3)。
图3 全国主要城市18年的降水总量[13]
4.3.4 太阳光照度
目前因无太阳光照度全国范围内的测量值,只能通过太阳光照度的影响因素(太阳高度角、能见度),定性推算各地太阳光照度的强弱。太阳高度角越高,能见度越高,太阳光照度越强。以各地空气质量指数(Air Quality Index,AQI)表征各地能见度,海南琼海市(试验场所在地)能见度排在全国前列(图4)。太阳高度角随着纬度的变小而增大,海南地区纬度低于全国其它地区,太阳高度角高于其它地区。因此,从太阳高度角和能见度2个方面推算海南地区的太阳光照度应该排在全国前列。

图4 全国主要城市AQI指数[14]
2022年6月初,海南试验场内的正午太阳光直射照度为140 000~164 600 lx,与树荫下的比值最大为10倍。
4.3.5 盐雾
全国各海域的整体盐雾水平存在差异,东南沿海略高于北方沿海。海盐离子含量与当地的环境温度、风向风速、海水温度和海水盐度参数有较大关系。环境温度和海水温度越高,海面风速越大,海水盐度值越大,该地区的海盐含量就越高。在同一区域内,离海距离和地形具体环境条件对盐雾水平的影响更显著。随着离海距离的增加,盐雾的浓度和沉积速率均会下降。
4.4 海南岛屿交通特征
4.4.1 城市道路面积
2020 年,海南省道路面积排在全国倒数第4 位,道路总面积小(图5)。

图5 2020年全国主要省市道路面积[15]
4.4.2 城市道路长度2020年,海南地区城市道路长度排在全国倒数第5位,道路总长度小(图6)。

图6 2020年全国主要省市道路长度[15]
4.4.3 两轮车交通参与者
2020年,海南省每100户两轮车拥有量排名全国第1,对照海南的道路面积和长度全国排名,海南地区两轮车密度很高(图7)。

图7 2020年全国主要省市100户两轮车拥有量[13]
4.5 海南热带植被特征
4.5.1 海南整体植被状况
海南省属于热带季雨林、热带雨林区域,植被种类丰富、结构复杂、构造特殊、终年生长。雨林的一个重要特征是具有大量附生的蕨类和有花植物,植物量(主要是木材)占陆地总植物量40%。其植被结构复杂,层次划分不明显,有乔木层、灌木层、草本层。在城市园区和路旁多种植灌木和小型乔木,在乡镇道路旁树木多枝冠宽大且枝叶茂密。
4.5.2 植被层次分类
激光雷达在探测复杂或深度纹理的物体(如灌木丛)时通常会产生噪声,从而阻碍系统的感知。激光雷达探测灌木丛时会产生“拖尾”问题及“空洞”问题。理论上,激光雷达脉冲打到物体表面是一个理想的光斑点,但是实际的激光雷达脉冲存在一定的发散角,打到物体上是一个面。当物体存在多层次的纵深结构时(比如灌木丛或者纵深大的植物),这样就可能导致激光雷达脉冲打到前面物体边缘时,部分激光脉冲打到后面层次的物体上,进而出现一个脉冲出去返回2个回波,无法判断以哪个距离为准。
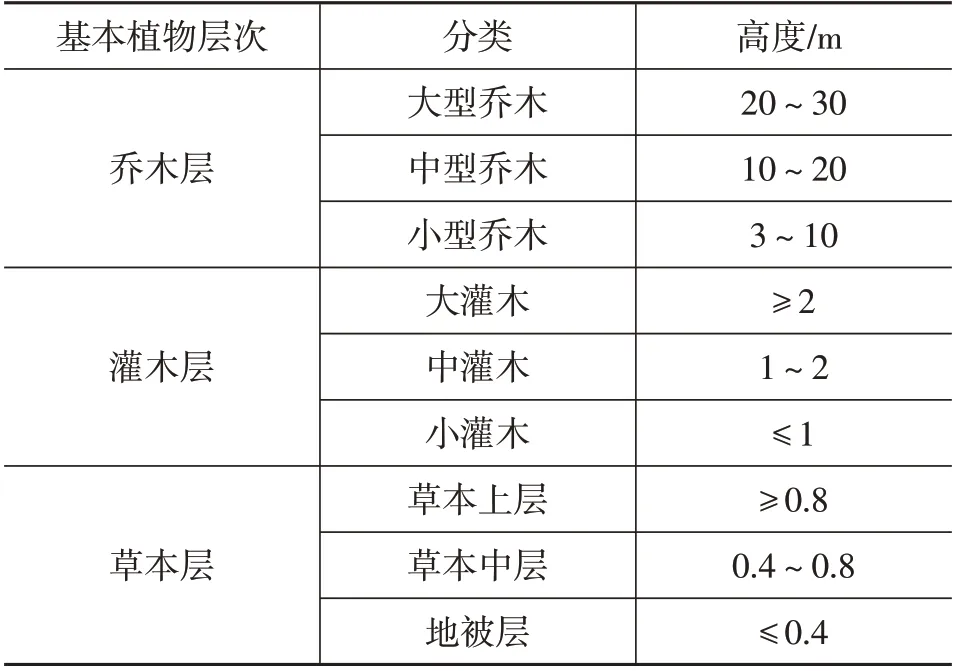
表3 基本植物层次及植物高度
激光雷达探测近处低矮障碍物,特别是具有多层次纵深的低矮植被时,在由远及近靠近过程中,出现点云“时有时无”的丢失现象被称为“空洞”。障碍物原始点云“时有时无”会让感知软件难以持续跟踪判断,从而无法准确判断是不是一个固定障碍物,容易导致智能网联汽车出现危险紧急制动或频繁的减速、加速现象。
5 智能网联汽车热带测试场景初步构建
5.1 强光照下标志和标线识别与响应
试验道路为包含双向2 车道的长直路并在路段内设置限速标志牌,车道线为白色虚线,限定车速≤40 km/h,光照度≥100 000 lx,交通畅通,没有其它车辆和行人干扰,道路两侧除树木外无其它遮挡物(表4)。

表4 强光照下的标志和标线的识别与响应场景

参与者类型动作参数交通参与者气候环境条件数字信息交通状况交通流量时间天气类型天气参数V2X设备测试车(1)初始位置:车道中央(2)移动方向:面向限速牌正面(3)移动速度:限速牌前100 m加速到限速牌速度以上畅通无白天晴天光照强度:100 000 lx或以上无
5.2 强光照下前方车辆的识别与响应
试验道路为包含双向两车道的长直路,并在路段内设置前方固定车辆,车道线为白色虚线,限定车速为30 km/h,光照度≥100 000 lx,交通畅通,没有其它车辆和行人的干扰,道路两侧除树木外无其它遮挡物(表5)。

表5 强光照下的前方车辆的识别与响应场景

参与者类型交通参与者动作参数气候环境条件数字信息交通状况交通流量时间天气类型天气参数V2X设备测试车(1)初始位置:车道中央(2)移动方向:面向故障车辆(顺光和逆光)(3)移动速度:限速牌前100 m加速到限速牌速度以上畅通无白天晴天光照强度:100 000 lx或以上无
5.3 强光树阴下的行人路旁行走
试验道路为至少包含2 条车道的长直道,中间车道线为白色虚线,并在道路两侧设置各类热带植被,同时试验道路上有长度达20 m以上的树阴(表6)。

表6 强光树阴下的行人路旁行走场景

气候环境条件数字信息时间天气类型天气参数V2X设备白天晴天光照强度:100 000 lx或以上;明暗光照度比:≥7无
5.4 雨雾天气的标志识别与响应
试验道路为长直道,并带有可模拟降雨天气环境的雨雾喷水装置,模拟下雨路段的道路长度为50 m以上,降雨量的参考标准如表7所示。同时在雨雾路段的终点提供限速30 km/h的车辆道路限速标志。模拟车辆从雨雾起点进入,检验车辆能否不受雨雾影响,正常识别道路限速标志。

表7 雨雾模式下的标志识别与响应场景
5.5 前方路面积水通行
试验道路为包含双向2 车道的长直道,车道线为白色虚线,直道长度大于100 m,并带有可模拟路面积水的测试区,模拟路面积水的道路长度为100 m以上,道路两侧无其它遮挡物(表8)。

表8 前方路面积水通行场景
5.6 茂盛灌木丛道路通行
试验道路两边密布超过车身高度的灌木丛,道路长度大于200 m,灌木超过道路边缘小于15 cm(表9)。

表9 茂盛灌木丛道路通行场景
6 结束语
智能网联汽车热带测试场景属于环境类测试要素,本文首先描述了国内外智能网联汽车环境测试发展现状,进而阐述智能网联汽车热带测试场景建设的必要性,最后提出智能网联汽车热带测试场景的整体结构以及初步构建智能网联汽车热带测试场景。在整体结构中描述了环境特征包含的要素,以及这些环境要素可能对自动驾驶功能安全产生的影响。
未来,根据本文的内容,可以继续归纳出一些具有代表性的智能网联汽车热带测试场景,将这些场景应用在实际的智能网联汽车测试中,依据测试的结果持续验证环境要素对于智能网联汽车自动驾驶功能产生的影响,并持续完善场景中的要素参数,构建更加完善的智能网联汽车热带测试场景库。
猜你喜欢
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
青年歌声(2020年12期)2020-12-23
女报(2020年7期)2020-08-17
工业经济论坛(2020年6期)2020-04-13
儿童故事画报(2019年8期)2019-08-14
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
学生天地(2016年6期)2016-04-16
现代制造技术与装备(2015年4期)2015-12-23
