面向观测网络供电的水下能量捕获技术研究进展
2023-03-17 13:02徐敏义
水下无人系统学报 2023年1期
张 宇,王 昊,相 城,徐敏义
(大连海事大学轮机工程学院 大连市海洋微纳能源与自驱动系统重点实验室,辽宁 大连,116026)
0 引言
水下立体观测网络是以海底观测网络为主体,移动观测网为扩展的水下立体观测系统。该系统通过有线或无线的方式,借助水下及海底传感器、自主水下航行器等固定或移动平台(如图1 所示),对海洋噪声、海洋污染、海水流动规律以及海底地形变化等进行全方位立体化的观测与信息采集[1-4],在水下环境监测、海洋资源开发和国防安全保护等方面具有重要的应用价值[5-9]。
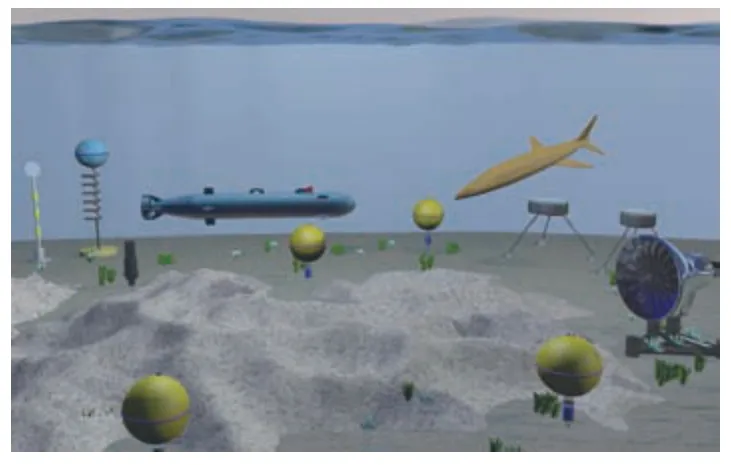
图1 水下观测网络Fig.1 Underwater observation network
目前,各类水下观测设备已形成初步体系,但供能问题始终是制约水下观测系统长时间工作的主要瓶颈。图2 显示了部分水下观测设备的能耗,包括浊度、盐度和压力传感器[10-11]以及水下移动观测平台等。微型水下传感器通常可下潜至水下300 m,最大潜深可达6 000 m,功率大多数在10 W以下[12]。这些传感装置既可以单独放置于水下,也可装配在无人航行器中进行水下勘测任务。对于水下移动观测平台而言,长度不超过1 m 的水下小型探测航行器功率通常在100 W 以内,最大续航能力不超过24 h[13]。其中,天津大学王延辉教授等[14]对水下滑翔机的能耗进行了详细分析,并指出电池电源是限制水下航行器工作时间的关键因素。水下观测系统的传统供电方式主要包括电池供电和电缆供电,其具有成本高、维护难等问题。以搭载蓄电池供电的水下航行器为例,频繁回收至岸上充电与再投放入海不仅降低设备工作效率,也会消耗大量人力物力。对于能耗较低的潜标,传统的电池供电虽能够驱动其在水下工作较长时间,但较大的电池体积阻碍了潜标的小型化。并且,大容量高功率电池的安全性也面临着挑战[15]。此外,对于海底观测网络而言,传统的海底电缆供电模式会限制观测设备的空间布置,对海洋探索也会存在一些局限性。
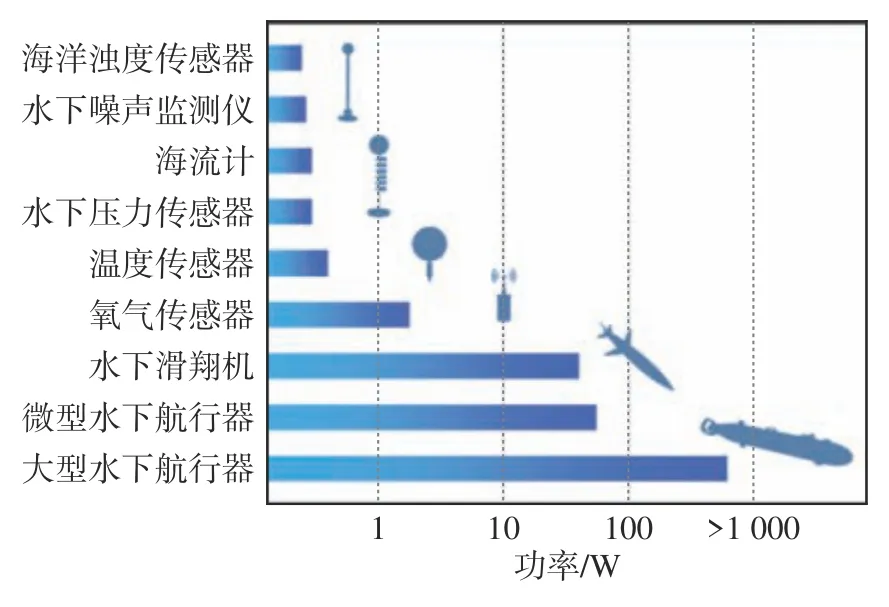
图2 部分水下装置能耗图Fig.2 Energy consumption diagram of some underwater devices
为提升水下观测网络的续航能力,基于水下能量捕获的原位供电技术受到国内外广泛关注。通过水下能量捕获装置将海洋能量转换为电能直接供给至水下观测设备,是一种很有潜力的解决方案[16]。
目前,海流能、波浪能、温差能及光能驱动的水下观测装置已有相关研究[17-20]。在众多海洋能量形式中,海流能与波浪能因具有分布范围广、能量密度高等特点,有望成为水下观测网络的主要能量来源[21],通过水下能量捕获装置与水下立体观测网络相结合的新型供电方式在海洋原位供电领域具有广阔应用前景[22]。
1 水下能量形式
水下能量形式丰富,包括海流能、波浪能、温差能、盐差能和光能等,如图3 所示。由于海水密度的差异、海上风力的驱使以及行星引力的影响,在水下会形成覆盖大部分水深的海流,且由于涡激振动以及流致振动效应的影响,海流在穿过某些障碍物时会形成不稳定的涡流[23]。波浪能则是风将动能传递给表层海水所形成的。海水可以高效且稳定的将太阳能储存在自身内部继而形成温差能。在江河入海口处,由于海水与淡水间盐浓度的差异,含盐量高的海水会向淡水进行扩散以平衡盐度差,从而释放出盐差能。
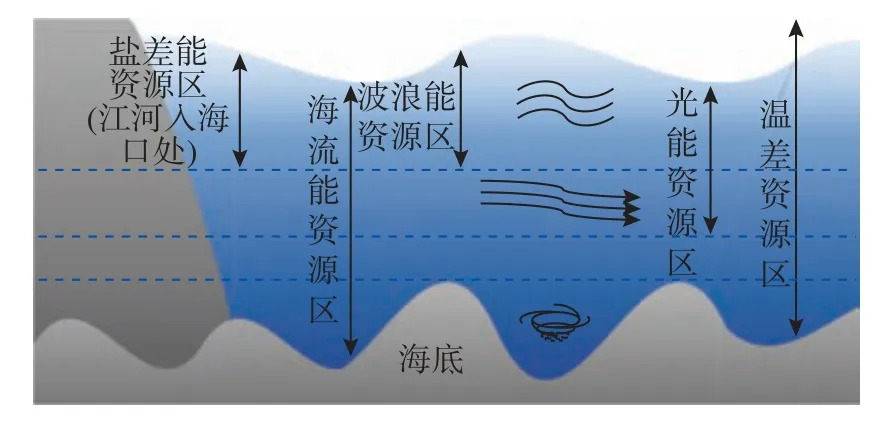
图3 水下能量分布区域Fig.3 The distribution of underwater energy
上述能量形式中,盐差能能量密度较低,暂不适合对水下观测装置进行能量供给。太阳光在水下的穿透能力较弱,这使得大多数水下观测装置无法依靠收集光能进行工作。海流能和波浪能具有分布范围广、能量密度高等优势,在水下观测网络供电领域具有广阔应用前景。海洋温差能具有总储量高、输入稳定性较强、昼夜波动小、不受气象与海况因素影响的特点,在水下装备能量供给领域具有重要应用价值[24-25]。近年来,应用于水下滑翔机的温差供电技术不断发展并取得良好成果[25]。由于篇幅受限,文中重点介绍基于海流能与波浪能供电的水下能量捕获装置。
海流的功率与流速、海水密度等参数有关[26],即
式中: P 为海流功率;ρ 为海水密度;A 为流通面积;U 为海水流速。据统计,世界范围内海流能总储量可达3.6 TW[27]。由图4 所示[28],当海流速度在1 m/s 以上时,功率密度可超0.5 kW/m2。
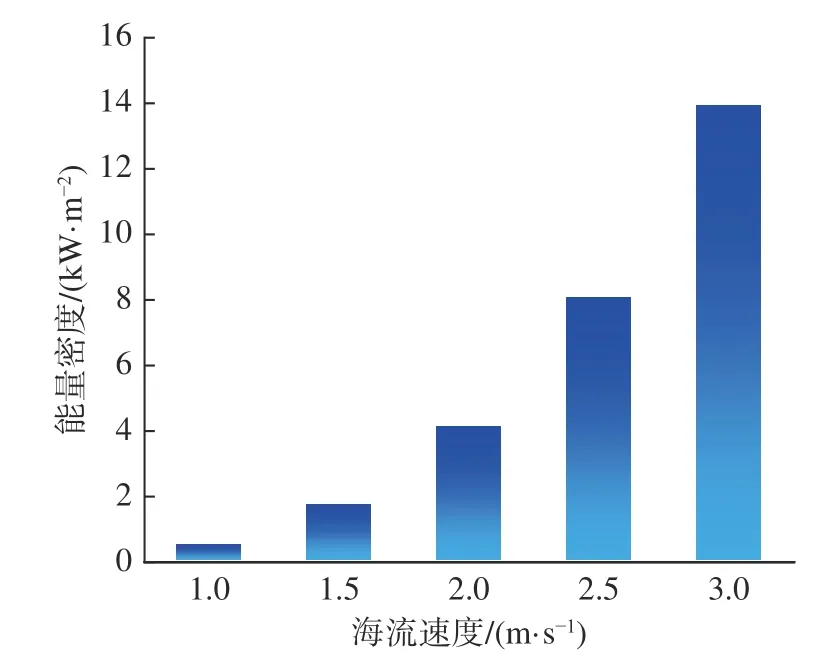
图4 不同海流流速所对应的能量密度Fig.4 Power densities of different ocean current velocities
波浪能同样具有持续性好、能量密度较高等优点。据统计,世界范围内的波浪能储量约为3 TW[27],与太阳能和风能相比,其能流密度更高[29]。除了水面运动,波浪在形成时通常会带动水下数米深区域的运动[30]。在波浪场作用下,水下装置会产生脉动压力场。目前大部分水下电磁发电机正是根据波浪导致水下压力场变化这一原理进行波浪能的收集[31-35]。
2 水下能量捕获装置
根据能量转换形式的不同,水下能量捕获装置可以分为电磁发电机、压电发电机和摩擦纳米发电机,如图5 所示。国内外研究团队针对不同条件下的海流能和波浪能,研发了基于电磁、压电和摩擦纳米发电的多种类型水下能量捕获装置,为水下观测网络的原位供能提供了众多方案[36-39]。
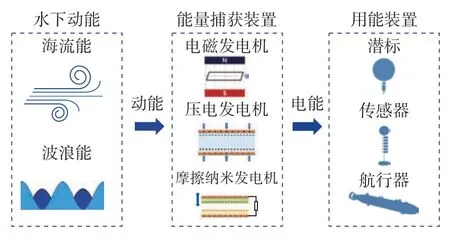
图5 水下能量利用方式Fig.5 Methods of underwater energy utilization
2.1 基于电磁发电机的能量捕获装置
2.1.1 电磁发电机基本原理
根据法拉第电磁感应效应,运动的导体切割磁感线将会产生电流。电磁感应效应可描述为: 当闭合回路中的磁通量发生变化时,闭合回路会产生感应电动势,从而在外电路中产生电流,原理公式为
式中: E 为感应电动势;ΔΦ 为磁通变化率;n 为线圈匝数[40]。
图6 更直观地展示了电磁感应效应,即运动的导体切割磁感线将会产生电流,感应电动势亦可表达为

图6 电磁发电机工作原理Fig.6 Working principle of electromagnetic generators
式中: B 为磁感应强度;L 为切割磁感线的导体长度;v 为导体速度[40]。
作为一种传统的能量转换方式,电磁发电机(electromagnetic generators,EMG)因能量转换效率高、电能输出稳定而被广泛应用于大型海洋能发电装置[41]。然而,对于体积受限的水下观测装置,基于EMG 的水下能量捕获装置面临巨大挑战。
2.1.2 往复式电磁能量捕获装置
往复式电磁能量捕获装置通过永磁铁的往复运动切割线圈进行发电。为延长水下传感器的工作时间,葡萄牙米尼奥大学Faria 等[22]研制出了一种布置于水下的小型EMG,如图7(a) 两线圈式电磁电机模拟图所示。该装置由安装在亚克力管内部的磁铁以及管外部的2 组线圈组成,通过捕获垂直于波浪传递方向的海水动能而输出电能。在模拟实验中,发电装置在自制实验平台中进行往复运动以模拟水下运动场景,频率范围在0.1~0.4 Hz,图7(b) 为两线圈式电磁电机能量输出[22]。实验表明,当199~510 Ω 之间的负载电阻与发电机串联时,电机平均功率可超过6 mW。模拟海浪频率在0.1 Hz 时,发电机功率为1.31 mW。当海浪频率达到0.4 Hz 的顶峰时,该电磁电机功率可达7.73 mW,输出能量达7.77 mJ/s,足以为数个水下小型传感器供电。

图7 往复式电磁能量捕获装置Fig.7 Reciprocating electromagnetic energy harvesting devices
与两线圈电磁发电机类似,我国台湾省中州科技大学Chiu 等[42]同样以水下传感装置供电为目的,研发了一种收集水流动能的小型电磁发电机。该小型能量捕获装置的结构示意图如图7(c)所示,图7(d)为该能量捕获装置的功率输出。作用在装置壳体上的外力使电机外壳与内部磁铁进行周期性的往复运动,进而使得线圈切割磁感线以产生电流。实验结果显示,该能量捕获装置最高输出功率可达5.8 mW,电压为1.5 V。
相比于大型电磁能量捕获装置,上述2 类小型能量捕获装置虽未能进行商业化的应用,但小型化、简易化的特点以及新颖的供电方式,可为日后电磁能量捕获装置向着小型化发展提供一定的思路。
除了动能驱动的往复式电磁能量捕获装置,目前还存在一种比较成熟的压差式波浪能发电装置,其原理如图7(e)所示。以典型的水下压差式波浪能发电装置(archimedes wave swing,AWS[31-32])为例,该装置由圆柱形气室和安装在海底的固定物两部分组成。当波峰越过AWS 时,装置受到的压力增大而使得顶部下移,气室体积减小;当波谷位于AWS 上方时,AWS 受到的水压降低,在气室内部高压空气的作用下,体积增大。在AWS 下方安装有永磁发电机,磁铁随着波峰波谷的变化而上下垂直运动,进而切割磁感线对外发电。水下压差式波浪能发电装置尺寸相对较小,易于产生显著的升沉运动[28]。该装置由上至下一般分为两部分: 用以俘获波浪能的浮子和永磁发电机单元,如图7(f)所示。该类型装置通过波浪带动浮标升沉运动或纵荡运动来带动动子相对于定子作往复运动,切割磁感线以发电。浮子的主要形式有圆柱状、球状和椭球状等。此外,通过直接将浮子和发电机相连的模式,可以大量减少动能传输中的损耗。东南大学黄磊[34]针对此类发电装置进行了大量研究,分析了不同水深下的波浪激振力、不同海况下浮标的位移等水动力参数和相应的电能输出效率。
Carnegie 公司研制的CETO 装置也是一种典型的水下压差式波浪能利用设备,装置外型如图7(g)中的右侧结构所示[19,35]。该装置通常位于海面以下几米处来捕获波浪能。通过将多个CETO进行阵列部署以实现更大功率的电能输出。此外,阿德莱德大学Sergiienko 等[19]发现单系泊点收集装置可以在水下更好地捕获来自于各自由度的纵荡和垂荡运动,如图7(g)所示。但对于CETO 装置来说,三线系泊虽在一定程度上抑制了装置的运动能力,但据估计其发电量约为单线系泊的3 倍[19]。
因点吸收式波浪能捕获装置发电效率高,技术较为成熟,且部分装置已接近商业化供电,这使得此类型波浪能捕获装置对水下观测网络供能的潜力极大。如图8 所示,通过阵列化布置此类小型波浪能捕获装置,形成海底电站,进而实现水下观测网络的供电覆盖或许是未来解决水下观测网络供能问题的有效途径。
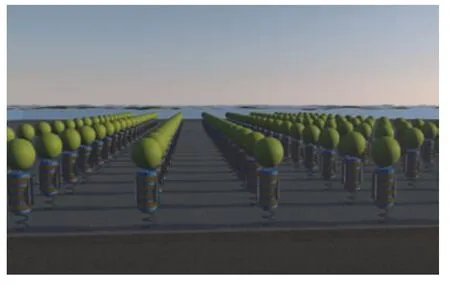
图8 阵列化点吸收式波浪能捕获装置Fig.8 Arrayed point wave energy harvesting devices
以点吸收式水下俘能装置为例,位于水下的能量捕获装置工作时可以避免海浪的冲击以及紫外线的影响,这意味着水下能量捕获装置通常可以具有较高的寿命。且将装置布置于水下,可以减少海面以上生物的视觉冲击,更不会占用航道,干扰船舶航行,这是水下能量捕获装置的优势。相较于文中所提到的其他电磁能量捕获装置,位于水下的点吸收式能量收集装置发展最为成熟,但将点吸收式俘能装置应用于水下观测网络的实例却极为稀少。这表明水下观测网络的原位供电技术仍处于起步阶段,若想实现这一技术,仍需要不断地对现有的水下能量捕获装置进行改进与创新。
2.1.3 旋转式电磁能量捕获装置
由于长度与空间的影响,直线电机在加减速时会产生一定的能量损耗。不同于呈单一自由度运动的往复电磁能量捕获装置,旋转式电磁能量捕获装置可以进行连续单向旋转,其起动转矩相对较低,能量转换效率较高。
旋转式海流能捕获装置根据叶片的形式不同可分为垂直轴式发电机与水平轴式发电机两大类,基本组成可分为以下4 部分。
1) 叶片: 捕获海流动能带动自身动作,将海流动能转化为叶片动能。
2) 传动机构: 将叶片传递而来的转速进行放大,以适应叶片在水下转速不宜过高的特点。
3) 发电机单元: 一般为电磁发电机,电磁电机通过接收传动机构传递而来的动能进行发电。
4) 密封单元: 对传动机构以及发电机单元进行密封,以防止发生海水腐蚀和海洋生物堵塞等问题。
旋转式海流能发电机的基本工作原理: 海流推动叶片旋转,以此带动发电机转子切割磁感线进行发电。
因我国大部分海域流速较低,尤其在水下环境中,随着水深的增加海水剖面流速下降极快,且流向较为复杂多变。这要求水下能量捕获装置具有低流速启动与发电的能力[43-44]。为了实现水下观测网络能量就地获取与使用,中船701 所田应元等[43]设计了一种应用于深海的超低速水平轴海流能发电装置,如图9(a)所示,其电压输出见图9(b)。该发电装置为适应低流速海域海况,在常规发电技术的基础上采用一种辅助启动技术,将传统的海流能发电装置的连续性发电模式转变为周期性发电模式,极大地降低了发电系统对于流速的要求。经实验结果显示,在海流流速为1 m/s 时,装置发电功率可达200 W,此功率足以为水下小型用能装置进行供电。此外,该发电装置在0.1 m/s 的来流流速下即可稳定输出电能,其原理的正确性以及可行性已得到验证,为今后工程样机的研制以及应用奠定了基础。
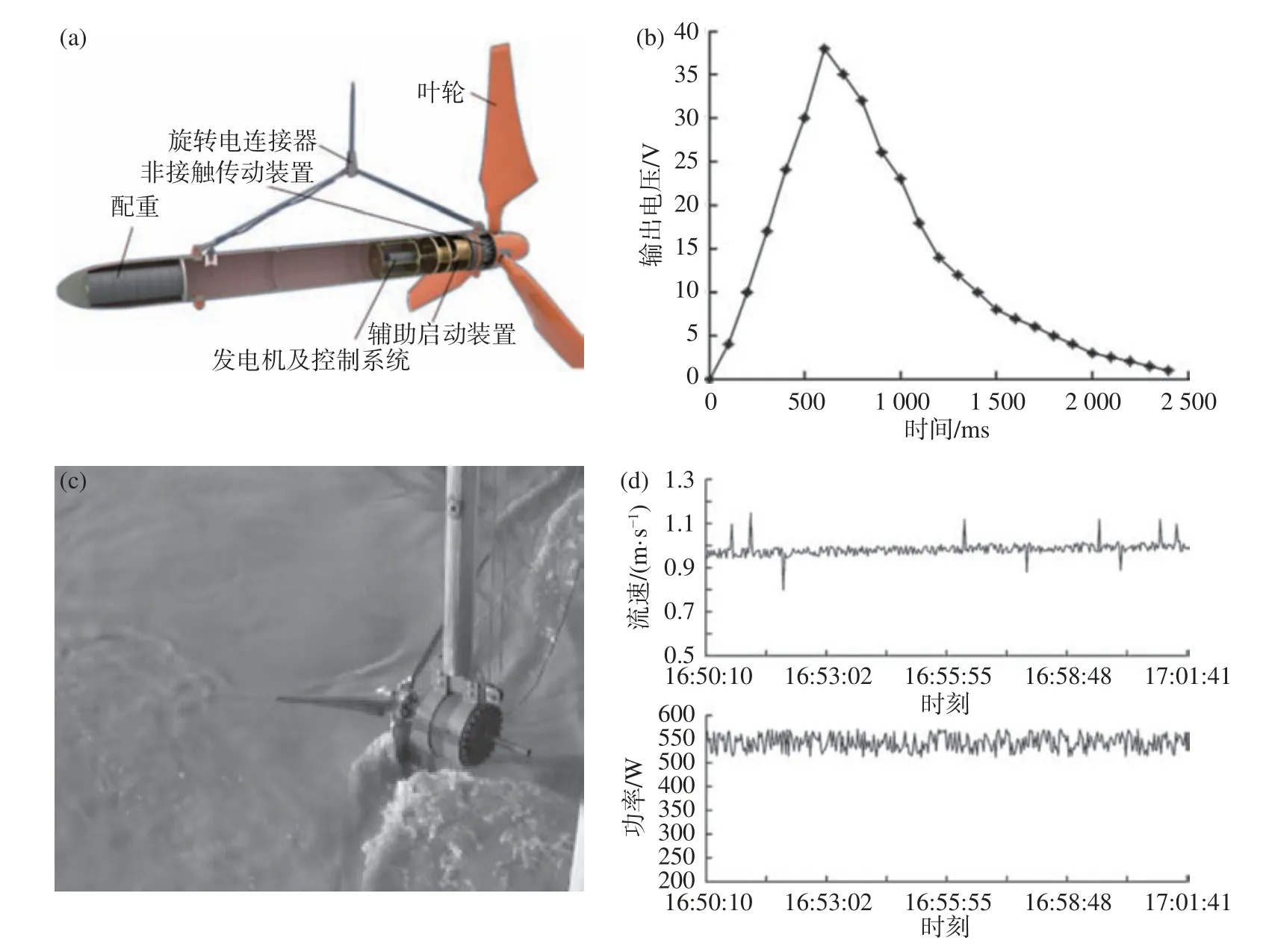
图9 低流速海流能发电装置Fig.9 Low flow rate ocean current energy power generation device
为实现低流速海流能的高效发电,解决海洋观测网络用能需求,上海船舶电子研究所祁长璞等[44]设计了一台额定流速1 m/s、额定功率达500 W的样机,如图9(c)和(d)所示。与并入电网的常规海流能发电机组不同,为使海流发电机的电能输出满足海洋仪器的使用要求,离网型海流能发电机需要考虑电能供应的稳定性问题。为此,该装置研发了一套能够将发电机输出的不稳定电能转化为稳定电能的能量管理系统。该系统的研发极大的提高了水下能量捕获装置的实用性,为今后工作于深海的海洋仪器实现真正的原位供电提供思路。随后,为进一步提升小型海流发电机对于低流速海流能的利用效率以及自身的稳定性,西北工业大学赵天祥等[45]设计了一种用于低流速海域的小功率海流能发电系统。实验中,该装置通过调节DC-DC 电路输出电流,用最大功率跟踪的方法对系统的稳定性与效率进行提升。相较于效率低、对控制要求高的传统调节方式,该工作具有一定的参考价值。
目前,绝大部分水下观测网络节点依靠装置内部电池或外接电池仓进行供电[15,46],这种供电模式存在较多弊端,通常普通的电池电源对于低功耗的水下传感器节点供能只能维持数周[47],电源耗尽后的人工更换成本也极高。通过外加电池舱能够有效增加水下观测网络的续航能力,但这并不是水下观测网络续航问题的完美解决方案。为了实现原位供电,意大利卡拉布里亚大学Cario 团队[47-48]设计出一种新型的水下海流能捕获装置,其中螺旋桨式海流电机与传感器水下应用图如图10(a)所示。同传统水平轴海流涡轮发电机类似,该海流发电机通过吸收海流动能带动自身叶片旋转,进而将海流能转化为电能,用于对水下传感器节点供能。经实验,在海流流速为1 kn 的条件下,该能量捕获装置输出功率为4 W,可以满足大部分水下传感器的用能需求。
此外,为增强水下潜标和水下系泊航行器等水下观测系统的能量供给,西北工业大学Ding 等[49]设计了一种安装于水下系泊装置用以捕获海洋低频动能的小型水平摆动式海流能捕获电磁发电机,如图10(b)所示。图10(c)为该装置摆距角为3°时不同频率下的功率。在该装置的模拟实验中,海洋动能频率为0.2、0.25、0.3 Hz 时,最大平均功率可达0.3 W。除研究解决水下系泊平台的能源供给问题之外,还设计了2 类直接安装于水下小型航行器内部的电磁能量捕获装置,用以对水下航行器中的传感设施供电或增强水下航行器的续航能力[50-51],水下无人航行器模拟图见图10(d);电磁发电单元模拟图见图10(e)。两类电磁发电装置安装方法与工作原理基本一致,水下航行器随着波浪的晃动带动内部的电磁发电装置动作以产生电流。

图10 旋转式电磁俘能装置Fig.10 Rotary electromagnetic energy harvesting device
经过测试,发电装置在1 级海况下所输出的功率超过150 mW,足以驱动小型传感器[50]。在2 级海况下,小型水下航行器中的电磁发电设备功率可达0.15 W,基本能够满足布置于无人水下航行器中的探测设备能源需求[51],图10(f)为其瞬时输出功率。
2.2 基于压电发电机的能量捕获装置
2.2.1 压电发电机工作原理
通过挤压某些电介质材料可以使得材料上下表面带有相反电荷,即所谓的压电效应。图11 展示了压电发电机的基本工作原理。在外力的激励作用下,压电材料上下表面会形成电势差。压电材料所产生的电压可表示为[52]
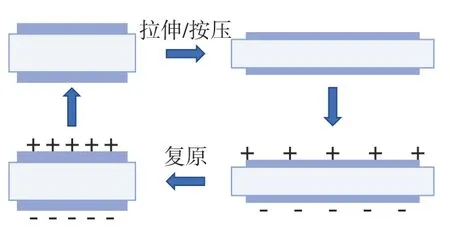
图11 压电材料发电方式Fig.11 Principle of the power generation of piezoelectric material
式中: V 为输出电压;L 为块体厚度;A 为沿力方向截面面积;F 为施加在压电板表面的力。
因压电材料具有功率高、结构简单、输出电压高并易于整流等优点[53-56],以压电效应为原理的能量捕获装置已经成为重要研究方向[57]。
2.2.2 用于水下能量收集的压电材料
具有压电效应的压电材料对于外界环境中的机械运动灵敏性极高,这使得压电材料可以用于吸收包括海流能和波浪能在内的机械能量,并将机械能量转化为电能。随着压电材料制备技术的不断发展,压电材料由最早的硬质石英材料逐渐发展为以压电陶瓷(piezoelectric ceramic transducer,PZT)、压电聚合物纤维和压电聚合柔性薄膜(polyvinylidene fluoride,PVDF)为主的各类高性能硬质或柔性材料[57]。除上述发展较为成熟的主流压电材料外,近年来比较新颖的还有以ZnO 纳米线为核心的压电纳米发电机等[58]。经过几十年的发展,压电发电机已经作为能量捕获装置应用于各类领域。尤其在海洋能量利用领域,其捕获能量时并不需要依靠运动部件,因此压电发电机可以被制作得极其紧凑且可靠,小型化的能量捕获装置使压电发电机在捕获海洋细微能量并对水下小型传感器供电方面具有极大的前景。
PZT 陶瓷与PVDF 薄膜是捕获海洋能量最常用的2 种材料,一般情况下对于同一机械能的捕获,相较于PVDF 柔性薄膜,PZT 陶瓷具有更高功率的输出[59]。但由于水下环境复杂,根据“卡门涡街”效应(如图12 所示),由海流引起的涡流能量呈多向性与发散性,以PZT 为主的硬质压电材料会限制其对于涡流能的吸收[60],而具有高延展性的PVDF 薄膜相较于高刚度、低灵活性的PZT 陶瓷更适合布置于水下收集海流动能。图13 描绘了柔性压电材料在涡激振荡效应下的形变[61-62]。

图12 “卡门涡街”效应Fig.12 The Carmen vortex effect
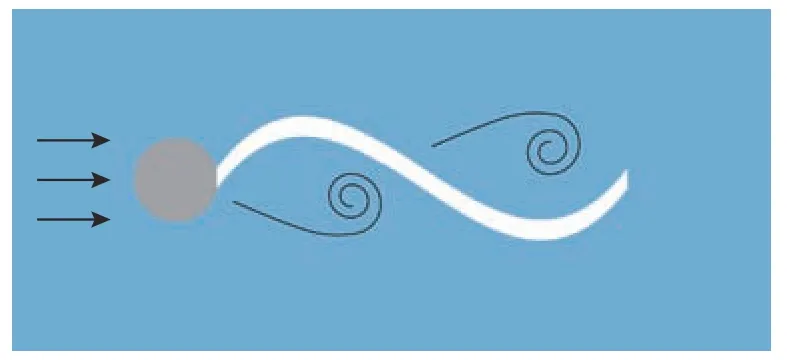
图13 柔性压电薄膜在涡流应力场中的形变Fig.13 Deformation of flexible piezoelectric films in vortex fields
2.2.3 柔性压电膜结构能量捕获装置
据上文所述,PVDF 压电薄膜由于材料具有高延展性以及抗冲击性而被广泛应用于海流能量的捕获。伦敦大学Taylor 等[39]根据PVDF 薄膜设计了一种鳗鱼型压电装置,其柔性电机及材料场景图见图14(a)和(b)所示,图14(c)为电压输出。仿生鳗鱼式压电发电机通过布置于水下,可将海流在涡激振动效应下产生的涡流能量转化为自身电能储存在内部电池单元,用以对水下移动观测装置与传感器供电。实验结果表明,仿生鳗鱼型能量捕获装置可在1 m/s 的水流下产生1 W 的功率。目前,该仿生鳗鱼已经完成了在实验平台上的数据监测。为了实现在海洋环境中的能量捕获,该装置仍需要解决一些比较突出的难点,包括如何在河口乃至开阔的海洋区域进行设计与布置,如何在复杂多变的海洋环境中实现稳定工作。
虽然将该装置应用于海洋中进行实际化供电仍具有一些困难,但Taylor 称,未来会将此“鳗鱼”作为小型轻量级发电装置为分布式水下机器人或传感器阵列的电池组与电容器供电[39]。
日本广岛大学Mutsuda 团队[63]近十年来致力于研究捕获涡激振荡的压电能量捕获装置。为有效捕获流体动能,其设计并优化了一种柔性薄片型压电装置(flexible piezoelectric device,FPED),装置结构与原理如图14(d)和(e)所示,电压输出见图14(f)。为有效捕获海流动能并承受由海流和波浪引起的巨大弯曲,FPED 由多层压电材料与弹性基片相结合构成。与上述电鳗结构类似,Mutsuda仍采用PVDF 作为压电材料。在模拟实验中,由10 层薄膜组成的FPED 在振幅为8 mm 时平均功率密度可达0.7 mW/m2。作为小型能量捕获装置,FPED 通过收集波浪与海流能量可成功激活无线传感器[63]。

图14 柔性压电装置Fig.14 Flexible piezoelectric devices
2.2.4 弹性悬臂梁结构能量捕获装置
水下系泊平台通常使用数十米或者数百米长的系泊缆绳固定在海底。受涡激振动效应的影响,海流流过系泊索时所产生的涡流动能也是客观的。为利用这些能量,西北工业大学An 等[64]提出一种新型的涡激压电能量捕获装置(vortex-induced piezoelectric energy converter,VIPEC),用以在水下环境中捕获海洋动能。其结构与功率密度如图15(a)和(b)所示,图15(b)中U 表示水流平均流速。该捕能装置由圆柱体、转动板与压电片共同组成。涡激振动所引起的周期性压力作用在旋转板上,驱动旋转板左右挤压压电片进而将海流动能转化为电能进行输出。由于目前关于水下悬臂梁结构能量捕获装置的受力分析研究较少,而悬臂梁结构的受力情况恰恰是影响此类装置能量输出最重要的一环。为了有效分析VIPEC 的输出性能,该团队通过进行二维计算流体动力学仿真,研究了悬臂梁自身长度以及海流流速对装置输出性能的影响。经实验分析,该水下能量捕获装置最大输出电压为2.3 mV,最大功率密度可达0.035 µW/m3,可以有效对蓄电池以及电容器进行充电以增强水下航行器等装置的工作时间。
与安装在水下系泊平台的VIPEC 装置应用场景不同,针对水下能量的高效捕获,日本学者Zurkinden[65]设计了一种固定于浅海海床的悬臂梁结构压电发电机,如图15(c)所示。该发电机功率输出估计可在mW 或W 级以上。在波浪振幅为0.03 m,周期1.1 s 的仿真实验中,该水下能量捕获装置输出电压峰值可达3.28 V。图15(d)是在水流作用下的水草呈现弯曲摆动。为进一步提高悬臂梁结构所受的应力冲击并提高发电效率,加拿大曼尼托巴大学Xie 等[66]研制了一种由固定在海底并向上延伸至海面的垂直悬臂梁结构压电能量捕获装置,如图15(e)和(f)所示。从其数学模型分析,在波高2 m,波长15 m 的条件下该悬臂梁装置功率可达55 W。

图15 弹性悬臂梁压电能量捕获装置Fig.15 Elastic cantilever piezoelectric devices
2.3 基于摩擦纳米发电机的能量捕获装置
2.3.1 摩擦纳米发电机工作原理
摩擦纳米发电机(triboelectric nanogenerator,TENG)的基本原理由中科院北京纳米能源与系统研究所王中林院士于2012 年提出[67-68],其是通过摩擦起电和静电感应效应的耦合,利用介质材料的表面电荷在周期性外力作用下产生交变的电场驱动外电路电子流动,从而对外输出电能。TENG利用摩擦起电与静电感应,可将无规则的机械能直接转化为电能输出,具有高电压、低电流的输出特性,在捕获和转化低频率、低振幅的机械能方面有巨大的优势,尤其面对高熵的海洋蓝色能源,摩擦纳米发电技术展现出广阔的应用前景。
王中林院士团队推导出了低速运动介质中的动生麦克斯韦方程组(Maxwell equations for mechanodriven slow-moving media)。首次在电位移矢量D中增加了Ps项,代表由于机械运动产生的表面电荷而引入的极化项。在麦克斯韦方程组中由原来的电磁转换引入了代表“动生电”的物理项及其力-电-磁耦合,建立了TENG 的理论基础[69-74],即
式中: Dʹ为电位移场;ρf为自由电荷的电荷密度;B 为磁场;E 为电磁场;v 为平均速度;Jf为局部自由电流密度;Ps为极化电场。
TENG 可分为4 种基本形式[69],即垂直接触-分离模式、水平滑动模式、单电级模式和独立层模式,如图16 所示。其中基于接触分离模式以及独立层模式的TENG 广泛应用于水下能量捕获。
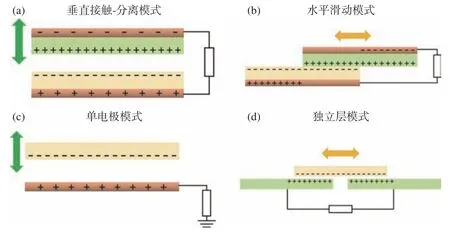
图16 TENG 基本工作形式Fig.16 Basic working modes of TENG
接触分离模式TENG 基于垂直方向上的极化效应产生电流(如图16(a)所示)。2 种具有不同电荷约束能力的介电薄膜通过不断地接触分离会使两电极间产生电势差。其对应的公式为
式中: S 为接触面积;d0为有效介电材料厚度;x(t)为2 种摩擦材料随时间移动的距离;ε0为介电常数[75]。
独立层模式TENG 基本原理如图16(d)所示。2 种不同电性的材料相互接触摩擦时会在两材料表面形成摩擦电荷。当一种材料移动时,由于静电感应效应使得外电路形成电流。其理论公式为
具体能量捕获装置工作原理将在下文详细介绍。
2.3.2 柔性接触分离模式TENG
为高效捕获海流能,大连海事大学徐敏义教授团队[76]研发出一种水下柔性旗子摩擦纳米发电机(underwater flag-like triboelectric nanogenerator,UFTENG),如图17(a)所示。UF-TENG 由导电油墨覆盖的聚对苯二甲酸乙二醇酯(polyethylene terephthalate,PET)、导电油墨覆盖的氟化乙烯丙烯共聚物(fluorinated ethylene propylene,FEP)和2 片聚四氟乙烯膜(poly tetra fluoro ethylene,PTFE)制成,如图17(b)所示。当海流激励装置摆动时,FEP 膜将定期与PET 膜接触分离。在与涂有油墨的PET 接触后,FEP 膜将带负电。根据静电感应的本质,当PET 的油墨电极与FEP 薄膜充分接触时,等量的正电荷会出现在PET 上的墨电极。随着UF-TENG弯曲,电子将从连接到FEP 的电极流到连接到PET的电极(通过外部电路),因此产生瞬态电流。随着FEP 和油墨电极分离,正电荷将流回上电极。根据其高杨氏模量以及良好的油墨粘附特性,选择PET材料作为UF-TENG 的摩擦层。单个UF-TENG 装置在流速为0.133 m/s 的低临界速度下,输出电压可达12.8 V,输出电流约为0.81 µA。在流速为0.416 m/s 时,6 个UF-TENG 单元并联的峰值功率可达52.3 µW,其对100 µF 的电容充电100 s 后可成功为水下温度计供电。UF-TENG 自身体型细薄、重量轻,可固定在水下设施表面对各种水下传感器进行供电。
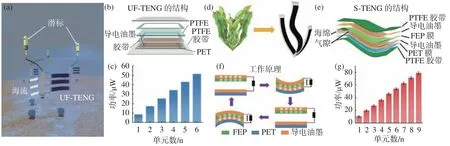
图17 水下柔性旗子与柔性海草TENGFig.17 UF-TENG and SW-TENG
此外,大连海事大学团队还设计了一种仿生海草型摩擦纳米发电机(seaweed-like triboelectric nanogenerator,SW-TENG)[30],可用于捕获波浪能,如图17(d)所示。该发电机由PTFE 薄膜、PET基片、FEP 薄膜与涂敷在PET、FEP 的导电油墨组成,如图17(f)所示。实验结果表明,随着振幅和频率的增加,SW-TENG 的输出性能增加,单个SW-TENG 最大电压可达24.8 V,输出电流最大达2.6 µA;在多组并联的条件下最大输出功率达79.023 µW。
该团队建立了柔性TENG 的动力学和发电模型,并通过实验方法研究了其在波浪和海流作用下的运动模态和发电性能。柔性摩擦纳米发电机具有低成本、强适应、高稳定等优势,为实现水下传感器自供能提供了新的思路。
为能够在深水区有效承受海水高压并进行稳定的电能输出,王中林院士团队研发出一种对状摩擦纳米发电机(paired triboelectric nanogenerator,P-TENG)[77],其单元由数十对组件成对组成,整体类似于“蜂箱”结构,如图18(a)所示,当水流穿过“蜂箱”内部空间,激励“蜂箱”表面P-TENG 组件动作并对外输出电流,原理如图18(b)所示,图18(c)展示了TENG 组件的结构。实验结果表明,在2.43 m/s 的水流流速下,该P-TENG 的累计电荷输出高达1.59 µC/s,大大优于现有的TENG 器件,功率与电流如图18(d)所示。此外该P-TENG 既可以附着在各种物体表面进行自供电传感,又可单独安置于水下,作为一种能量收集装置进行水下供电。由于此装置体积较小,因此可以在实际应用中大规模阵列形式部署。
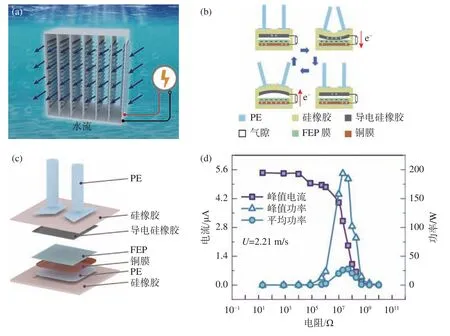
图18 P-TENG“蜂箱”结构、工作原理及电能输出Fig.18 The beehive structure,working principle and electric energy output of P-TENG
该P-TENG 展现出优异的性能以及广阔的应用前景,其大范围集成后可作为“水下电站”的一种形式为水下观测网络进行供电。
2.3.3 刚性独立层模式TENG
为了捕获水流能量,美国麻省理工学院Ahmed[78]设计了一种独立层模式水下摩擦纳米发电装置(underwater triboelectric nanogenerator,UTENG),如图19(a)和(b)所示,图19(c)为其电能输出。该装置由定子和转子的交替层组成,转子由铜材料制作。每个U-TENG 组件自上而下为丙烯酸板铜转子、FEP 板、电极板与丙烯酸板,呈三明治结构一层层累加4 组U-TENG 构成一个单元。水流驱动最外层叶片带动转子旋转,带动独立层形式摩擦纳米发电机工作。实验结果显示,这种结构最高可以产生400 V 的电压,0.8 mA 的电流,功率可达200 mW。产生的电能可稳定驱动水下pH 传感器与浊度传感器工作。
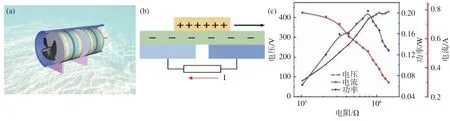
图19 独立层模式水下摩擦纳米发电装置Fig.19 Underwater triboelectric nanogenerator
此外,为捕获浅水低流速水流动能,中科院北京纳米研究所设计出独立层模式的鱼型摩擦纳米发电机(fully-enclosed triboelectric nanogenerator,FE-TENG),结构与工作原理如图20(a)、(b)和(c)所示[79]。该装置摩擦材料由PTFE 小球与铜电极组成。当水流流过FE-TENG 时,PTFE 小球随着水流冲击在铜电极包裹的通道中移动,进而与铜电极发生摩擦使得PTFE 表面带负电,铜电极表面带正电。随着PTFE 小球的运动,铜电极表面正电荷由于静电感应的作用会在外电路进行移动,进而对外输出电流。在水流流速为0.81 m/s 的模拟实验中,FE-TENG 的峰值功率密度达0.36 W/m3。在实际应用中,FE-TENG 在水中浸泡35 天后依然表现出良好的电输出性能。与鱼型仿生结构类似,该纳米研究所设计的另一种仿生鱼尾型摩擦纳米发电机(triboelectric soft fishtail,TE-SFT)对于水流能量的捕获依然可以表现出良好的电能输出,见图20(d)。在流致振动作用下,仿生鱼尾由于惯性作用将进行往复摆动。鱼尾摆动所产生的力将作用在内部尼龙球,使其左右移动,进而从低流速水流中获得足够的能量以带动传感器动作[80]。
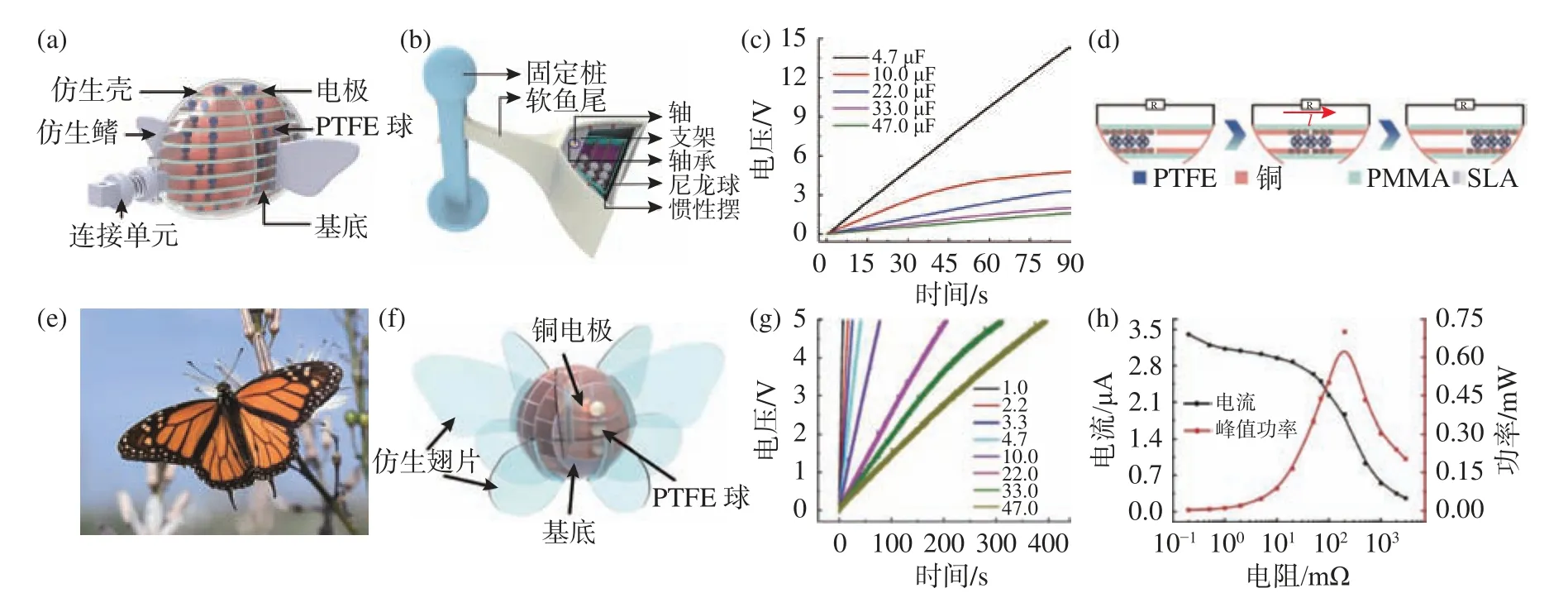
图20 仿生鱼型TENG 与仿蝴蝶翅膀型TENGFig.20 FE-TENG and BBW-TENG
各类仿生结构为水下能量捕获装置的设计提供了思路。除上述两类仿生鱼型TENG,长春工业大学Wang 等[81]设计出一款仿蝴蝶翅膀型摩擦纳米发电机(bioinspired butterfly wings triboelectric nanogenerator,BBW-TENG),用于捕获水下波浪能,图20(f)展示了BBW-TENG 的外型,其充电能力与电能输出见图20(g)和(h)。该装置可以收集来自多个自由度的波浪能,并将其转化为电能进行输出。实验结果表明,BBW-TENG 可以在1.25 Hz的频率下实现400 V、2.9 µA 的电能输出,且自身具有很强的水下适应性,在水中持续工作45 天仍具有良好的输出性能。
作为一种新型发电方式,TENG 被尝试用于水下涡流、海流和水下波浪等各种形式的水下能量捕获,为水下供能不断向轻便化、分布式发展提供了一种新颖的思路。此外,摩擦纳米发电通过与电磁发电机、压电发电机等其他发电技术的结合,可以在水下能量捕获等领域发挥更大的作用。
2.4 混合型能量捕获装置
因电磁发电机、压电发电机和TENG 在能量捕获领域各具优势,近年来研究人员尝试通过将上述3 类或2 类不同原理的能量捕获装置进行结合以提高其能量捕获效率。与依靠单一原理进行发电的传统能量捕获装置相比,混合型发电机可以最大程度地将环境能量收集并转化为电能[82-84],且可以较好地弥补基于单一原理能量捕获装置的缺陷。
在4 种TENG 工作模式中,基于旋转结构的独立层模式TENG 结构较为成熟。目前的研究成果证明该结构可高效捕获流体能量[78,85-88]。因旋转结构TENG 在捕获环境能量时装置自身运动状态与旋转式电磁发电机工作状态较为相像,这使得将二者相结合形成EMG-TENG 混合型能量捕获装置成为可能。
为了更好地收集复杂恶劣环境中的能量,重庆大学Guo 等[89]设计了一种可放置于水下捕获水流能的EMG-TENG混合型能量收集装置(water proof triboelectric electromagnetic hybrid generator,WPHG)。其外形见图21(a),该能量捕获装置自上而下分为EMG 与TENG 两部分。其中基于旋转结构的独立层式TENG 由铜材料充当电极,铜电极呈径向结构布置于丙烯酸板之上,FEP 薄膜覆盖在铜电极表面充当定子,定子上方的铜材料通过旋转使得外电路产生电流。具体工作原理可参考旋转式TENG 发电原理[78,85-86],见图21(b)。EMG 由直径100 mm 的亚克力板制备而成。在亚克力板的外边缘均匀嵌有6 个相同的线圈,6 块大小相同的磁铁安装在亚克力板上方的丙烯酸板处。为更好地实现EMG 与TENG 的同步运转,该装置于TENG上装载相同的6 块磁铁,与EMG 磁铁一一对应,2组磁铁之间由于引力作用相互吸引。当EMG 捕获环境能量进行转动时,通过EMG 与TENG 磁铁之间的引力作用即可带动TENG 工作,实现TENG非接触式旋转。磁铁之间的引力是实现TENG 与EMG 共同运转的关键因素。经实验,在1 600 r/min的转速下,该混合能量捕获装置的短路电流可达2.3 mA,开路电压达到5 V。在22 s 内,该装置输出的电能可将20 mF 的电容充电至1 V,见图21(c)。当此装置布置于水下捕获水流能量时,所捕获的能量可点亮数十个LED。作为一种外接电源,该装置的研发为驱动水下小型设备提供了新方法。

图21 混合型能量收集装置Fig.21 Hybrid energy harvesting devices
为更高效地对海洋观测网络供能,大连海事大学Wang 等[90]研发了一种具有高适应性的EMGTENG 混合型能量捕获装置。图21(d)为其外型与结构组成,图21(e)为发电原理,图21(f)为功率输出所示。此装置由涡轮、轴和EMG-TENG 混合纳米发电机三部分组成。涡轮捕获海流能将动能传递至EMG 与TENG 处,从而带动EMG 与TENG旋转发电。采用垂直轴涡轮可以使该装置更好地捕获水下海流能量。装置EMG 部分与传统电磁发电装置相同,能量捕获装置通过旋转磁铁切割线圈对外发电。TENG 部分转子由PVC(polyvinyl chloride)薄片构成,定子由尼龙材料以及铜电极组成。实验表明,该混合动力装置在转速频率为5 Hz 时的峰值功率达449 mW,可为50 mAh-3.7 V的锂电池充电。
海流流速与装置的电压频率呈线性关系。由于海流流速是海洋环境中的一个重要参数,这使得该装置除作为一种为水下观测系统供电的能量捕获装置外,还可作为流速传感器的一种形式来监测海流信息。虽然该装置目前仍停留在实验研究阶段,但其作为水下能量捕获装置以及水下传感器具有极大的应用潜力。
3 水下能量捕获装置对比与展望
3.1 水下能量捕获装置优缺点比对
图22 展示了上述3 类能量捕获装置的原理及其优缺点。表1 中总结了上文主要发电装置的原理以及电能输出,图23 描述了电磁发电机、压电发电机、TENG 的电压输出、电流输出和鲁棒性等方面的特性。相较于压电和摩擦电2 种能量捕获装置,基于电磁感应原理的能量捕获装置最成熟。对于高频能量的捕获,电磁发电机可以产生更高的电能输出与更为稳定的电流,尤其在高流速海域,基于电磁发电机的水下能量捕获装置已经能够进行商业化发电,但是其体积相比于TENG和压电发电机较大,结构也更为复杂。且目前大多数电磁能量捕获装置转子材料多采用永磁体,定子以刚性材料为主[22,42,31-35,67-68]。当装置放置于水下时,对其防腐性能提出了更高的要求。另一方面,位于水下的电磁发电机在捕获低频动能时,能量捕获效率将会减弱。
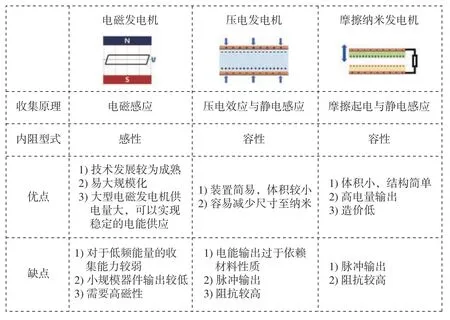
图22 3 种水下能量捕获装置工作原理与优缺点分析Fig.22 Analysis of the working principles and advantages and disadvantages of three underwater energy harvesting devices

表1 水下能量捕获装置参数列表Table 1 Parameter list of underwater energy harvesting devices
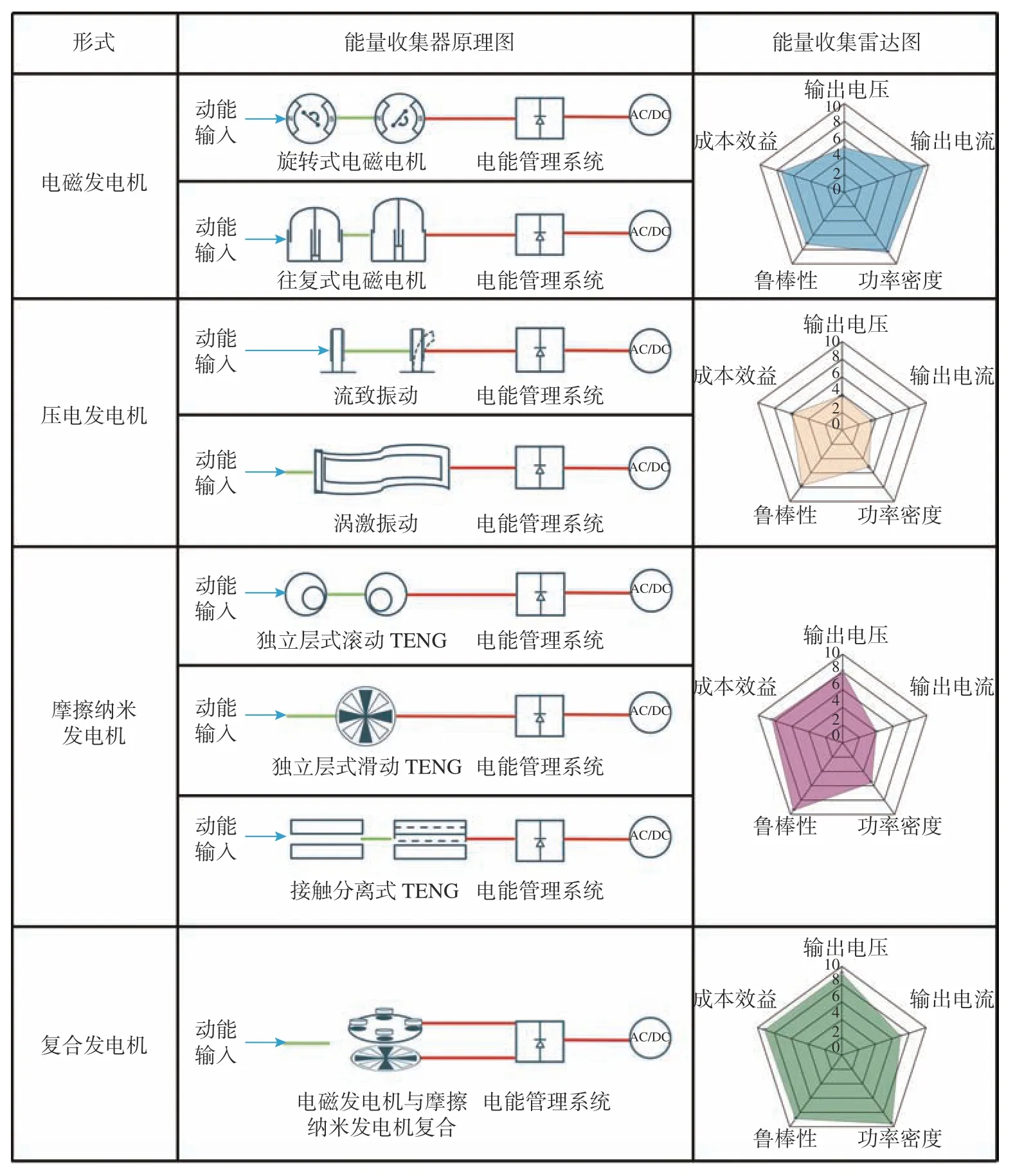
图23 水下能量捕获装置优缺点比对Fig.23 Comparison diagram of characteristics of underwater energy harvesting devices
不同于电磁发电机,压电发电机和TENG 具有体型小、结构简单、对输入要求低以及鲁棒性较高等优势。由于TENG 和压电发电机发电性能与材料密切相关,如广泛应用于压电发电机的PVDF、PZT 材料以及用于TENG 的FEP、PTFE 材料,这些材料可以使设备有效应对腐蚀,更容易适应复杂的水下环境。
对于压电发电机而言,其发展时间相较于TENG 更长,技术也更为成熟。如图23[12]所示,压电发电机的优势在于装置自身具有较好的鲁棒性。特殊的材料以及相对灵活的结构使其即使在极端的海况下也能够保持较稳定的电能输出。简单的结构以及对外界压力变化的高灵敏性使得压电发电机在自供能领域也有着广阔的前景[91],但由于技术上的限制,压电发电机并不会输出很高的能量,较小的电流输出使其适合为一些水下小型传感器供电而不适宜为大功率设备供能,这是压电发电机的主要局限。
TENG 发展历程仅有10 年,是捕获高熵能量的一种新方法[92]。由图23 可知,相比于电磁发电机与压电发电机,TENG 所输出的电压较高,且受环境中能量频率高低的影响较小(外界能量频率小于5 Hz 时,TENG 的输出性能优于电磁发电机[93])。上述特点使得TENG 可与水下各类小型传感装置相匹配以进行能量供给。尤其对于水下潜标、传感器这类单机低能耗装置,通过将小型TENG 安装至用能装置内部,又或将TENG 与多功能传感器结合实现自供电海洋传感将会是一种具有前景的发展方向[94]。
3.2 水下能量捕获装置展望
相较于世界其他国家,我国海域海水流速普遍偏低[43-45]。为更有效地利用海水动能,根据不同海域的能量分布特点,应更具针对性的部署能量捕获装置。表面海流流速影响着海水流动状态。由于受黑潮的影响,我国潮流中黄海、渤海和东海潮流流速较高,能量密度较大。其中渤海与黄海的潮流以半日潮为主,平均流速在1 m/s,部分地区最高流速可达2 m/s,如图24 所示。该部分海域适合布置以海流能发电为主的能量俘获装置。
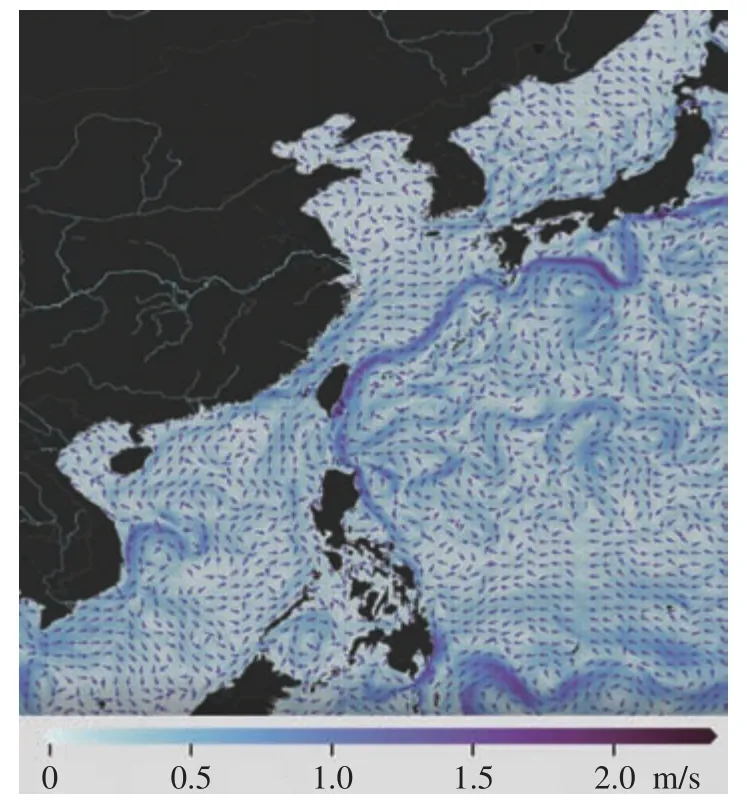
图24 我国沿海海域流速分布Fig.24 Velocity distribution of current in Chinese coastal sea
对于我国波浪能分布状况,图25 描绘了我国沿海海域波浪能的能流密度。由图所示,在有效波高分布中,渤海(内海)最低,黄海次之,波高普遍在1 m 以下。东海和南海波高最高,波浪高度在1~1.5 m 区域内,使得该部分海域可成为波浪能捕获装置部署的良好平台。

图25 我国沿海海域有效波高Fig.25 Significant height of wave in Chinese coastal sea
根据已有文献可知,当前面向水下观测网络供电的各类能量捕获技术仍处于起步阶段,面临众多挑战。因此,对未来水下能量捕获技术发展提出以下几点展望。
1) 发展混合型能量捕获装置以提升电能输出
上述水下能量捕获装置的功率输出理论上已经能够满足不少水下观测设备的用电需求,但依然存在着较大缺点。例如: 电磁发电机捕获低频能量输出效率低,TENG 与压电发电机的电能输出小等。水下立体观测网络的发展在未来将会更加迅速。为此,提升目前水下捕能装置的效率、开发适配水下观测网络的能源供给装置越加重要。为改善能量捕获装置性能,研发混合型能量捕获装置是提升设备能量捕获效率的一种可行方案。
混合式能量捕获装置是指将2 种或2 种以上不同发电原理的能量捕获装置通过一定的结构相结合进行发电[35]。以EMG-TENG 混合电机为例,混合之后的能量捕获装置可以有效弥补电磁发电机对于低频输入发电效率低以及TENG 输出电流低的缺点,最大限度地提高海洋能量的转换效率[95-96]。
研发混合型能量捕获装置需要考虑合适的安装组合方式,使其尽可能发挥各类电机的优势。据上文所述,目前针对水下能量捕获的混合型装置已有部分成果,主要集中于EMG-TENG 的复合,且复合装置以旋转型结构为主[89-90],结构较为单一。此外,除EMG-TENG 复合型装置外,目前用以捕获水下能量的其他复合种类发电装置仍较少。研发不同原理发电装置进行组合的新结构、尽可能地将3 类不同原理的能量捕获装置进行结合,以更为高效的捕获海洋能量,成为未来水下能量捕获装置发展的可行道路。
2) 阵列化水下能量捕获装置以形成能量捕获网络
目前已有的小型压电、摩擦纳米发电能量捕获装置,具有成本较低、结构简单、体积较小等优势。而对于大范围集成化的供电系统,单个装置的损坏并不会影响整体的电能输出。这一特点使得未来以TENG 和压电发电机为核心建设集成化海底电站成为可能(如图26 所示),并有望与水下观测网络形成良好的能量供给关系。目前已经有部分学者提出关于TENG 网络的构想[97],但真正实现这一愿景仍存在较多障碍,未来需要不断提高能量捕获装置的电能输出效率以及耐用性等。
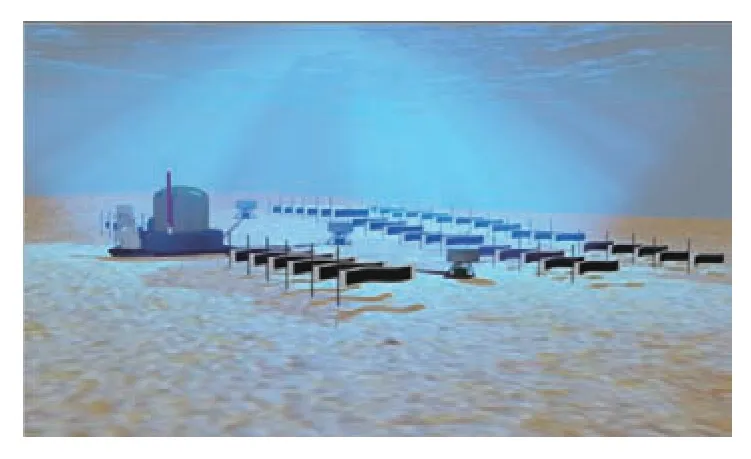
图26 水下TENG 网络Fig.26 The underwater TENG network
3) 研发新型材料以提高能量捕获装置耐久性
除对能量捕获装置进行组合以提高捕能效率外,研发更为适合海洋环境的新型材料也是未来优化水下能量捕获装置的有效办法,以TENG 为例,摩擦材料的不同会严重影响TENG的发电性能。不同于岸上能量捕获装置的工作环境,远离陆地的水下能量捕获装置因极端的工作条件、深层海水的腐蚀、以及长时间作业需求使得其使用寿命成为研究人员重点关注的要素。
此外,还需研究生物附着对于装置性能的影响。因过度的水下生物附着会导致装置的重心以及稳心发生改变,这会使水下捕能装置的水动力性能发生改变。为此,为确保水下能量捕获装置的长期高效运行,研究新的方法对能量捕获装置进行必要的保护极其重要。
4 结束语
文中梳理了水下能量捕获技术的研究现状,介绍了3 种不同原理的水下能量捕获方式,包括电磁发电机、压电发电机与TENG,并对上述发电机目前的典型发电技术进行了总结。最后以实例对上述3 种发电装置的优缺点进行对比分析,为水下能量捕获技术的研究与发展提供一定的参考。
综合来看,目前面向水下立体观测网络供电的水下微小型能量捕获装置已经形成初步体系,部分水下能量捕获装置已能够实现稳定的电能输出,足以满足小型传感器装置、小型航行器等水下观测装置的能量需求。但水下能量捕获装置的研究仍处于起步与发展阶段,目前还未有对水下观测网络进行连续性供电的实例,大多能量捕获装置只能满足于在实验室所模拟的水下环境中进行工作,发电量也仅可满足水下观测网络中部分微型装置的供能需求,且装置存在使用寿命短、发电不稳定等缺点。未来仍需不断研发改进和优化能量捕获技术,以期实现真正意义上的水下原位供电。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
学苑创造·A版(2022年4期)2022-06-18
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
当代陕西(2020年24期)2020-02-01
压电与声光(2019年1期)2019-02-22
小哥白尼(趣味科学)(2018年12期)2018-12-18
测控技术(2018年2期)2018-12-09
铜仁学院学报(2018年6期)2018-07-05
上海大中型电机(2017年4期)2017-02-06
中国航海(2014年1期)2014-05-09