跨介质航行器入水多相流场及运动特性研究现状与展望
2023-03-17 13:02许海雨卢佳兴
水下无人系统学报 2023年1期
王 聪,许海雨,卢佳兴
(哈尔滨工业大学 航天学院,黑龙江 哈尔滨,150001)
0 引言
跨介质航行器由机载平台或舰载火炮发射,其高速入水过程具有强瞬时性和非定常运动特性,伴随着气-液-汽三相两质强湍流、介质突变等复杂多相流动现象,是高速水动力学研究领域的核心问题[1]。跨介质航行器入水过程中快速生成超空泡,改变了传统水下航行器的流体动力布局,使得航行器入水过程存在复杂而独有的运动现象[2]。
高速航行器入水受到巨大的冲击载荷,同时部分动能和势能转化为排开水的动能,形成超空泡[3-5]。根据运动体与空泡的位置耦合关系,入水空泡分为全沾湿、部分包裹空泡及全包裹空泡3 种形式,改变了运动体的流体动力特性及运动特性,同时又受到运动体形状、入水速度、入水姿态角等多种因素影响及制约[6-7]。研究高速条件下入水空泡的生成机理、发展规律及流体动力特性,既是深刻认识与理解高速航行器入水运动机制的前提,也是开展跨介质超空泡武器装备工程研制的重要理论基础。因此,运动体跨介质高速入水多相流动成为近年来领域研究的热点问题。
1 入水空泡形态及运动特性
1.1 球体入水空泡形态
运动体的形状和尺寸会影响其入水空泡形态。由于球体具有良好的对称性,早期,国外学者更多将球体作为研究对象,开展了大量球体入水的实验研究,为超空泡射弹入水的研究奠定了理论及实验基础。Gilbarg 等[8]首先讨论了大气压力对球体入水的影响,发现大气密度和初始入水速度是影响水面闭合的主要影响因素。May[9]进一步讨论了球体尺寸对入水空泡形态的影响特性。Duez 等[10]指出生成空泡的临界速度与球体接触角有关。球体头部接触角小于90°时,生成空泡临界速度为7.2 m/s;而接触角大于90°时,临界速度降低。图1 给出了不同球体接触角θ 和速度V 的入水空泡形态,当速度低于临界速度时,则无空泡生成,如图1(a)所示。Aristoff 等[11-14]观察到4 种不同的入水空泡形态,如图1(b)~(e)所示,并获得了球体密度及亲水性对入水空泡形态的影响。Speirs等[15]研究了系列球体接触角入水空泡演变特性,获得了弗劳德数和韦伯数对空泡形态的影响特性。Truscott 等[16-19]系统研究了球体入水过程流体动力特性,并探究了影响球体非稳定流体动力的因素,指出球体倾斜入水与垂直入水在空化流动及流体动力等方面存在显著不同。Zhou 等[20]基于流体体积函数(volume of fluid,VOF)多相流模型和剪切应力传输(shear stress transfer,SST)湍流模型模拟了球体入水运动过程,发现入水速度和攻角不仅影响空泡闭合模式,也影响空泡形态特征及球体运动特性。Marston 等[21]通过实验研究了高温球体入水的空泡形态,定量对比了高温球体与常温球体入水空泡的形态差异。此外,还有学者针对球体入水跳弹现象开展了大量研究,获得了球体入水运动参数对跳弹现象的影响特性,并指出了跳弹现象发生的临界入水角[22-24]。
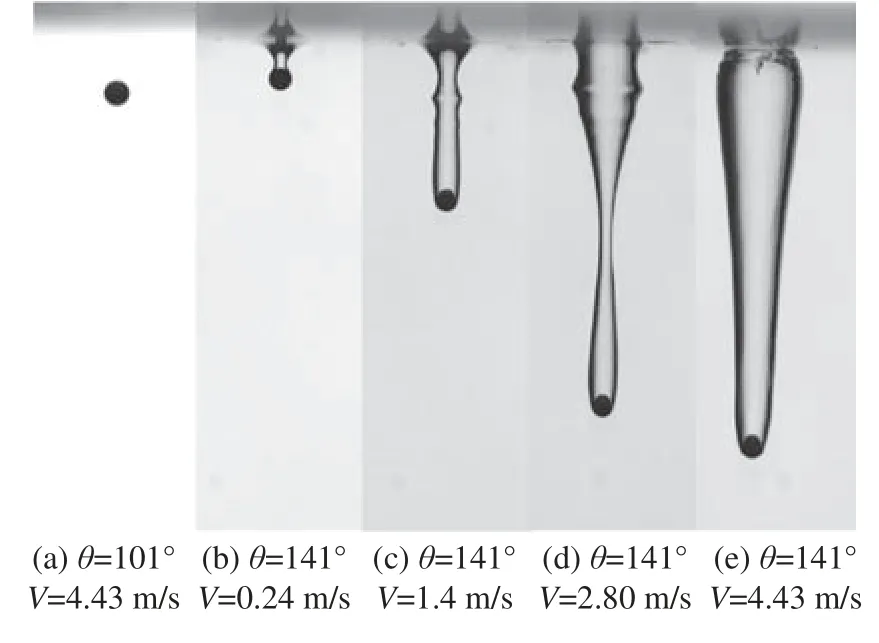
图1 不同接触角及速度下球体入水空泡形态Fig.1 Cavity shape of spheres entering water with different contact angles and velocities
上述研究对象均为刚体球体,而弹性球体入水引起的大变形及流固耦合问题也越来越引起学术界的关注。Belden 等[25]针对球体在水面弹跳的问题,采用数值仿真和实验测试相结合的方法,揭示了弹性球体在水面跳跃的物理机理。Hurd 等[26-27]实验研究了弹性球体入水问题,借助高速摄像对空泡形态进行了分析,发现了弹性球体入水形成独特的嵌套空泡。由于球体的弹性材质,入水后球体变形形成扁椭球体并生成一个更大尺度的空泡,之后在弹性力的作用下,球体形变恢复,产生径向更小的空泡。因此,在球体持续的振荡特性下,产生了嵌套空泡,如图2 所示。国内的魏英杰和杨柳等[28-29]开展了超弹性球体入水的数值仿真和实验研究,发现超弹性球体入水后具有独特的周期性形变行为: 横向扁平球体—纵向扁平球体—横向扁平球体。
1.2 运动体高速入水尾拍运动特性
运动体高速入水形成超空泡,导致运动体浮力消失,为了揭示运动体高速入水稳定运动特性,国内外学者开展了大量研究。在实验方面,受实验条件限制,入水速度通常较低(小于300 m/s)[30]。针对超高速射弹入水的试验研究较少,美国海军武器实验中心开展了入水速度范围为800~1 070 m/s的系列模型入水实验[31]。Kirschner[32]和Hrubes[33]等开展跨音速运动体入水实验,观察到了激波现象。此外,对于射弹水平入水运动也开展了相应实验研究[34-35]。国内,郭子涛等[36]开展了速度变化范围为397~603 m/s 的射弹入水弹道特性实验。国内外研究结果表明,射弹水下高速运动稳定机理为尾拍运动。
随着计算流体力学的发展,数值仿真计算的精度不断提高,成为研究运动体高速入水运动特性的重要手段。王晓辉等[37]基于ABAQUS 有限元软件耦合欧拉-拉格朗日方法研究了高速射弹倾斜入水的尾拍运动特性,指出尾拍运动是维持射弹动态稳定运动的机制。刘如石等[38]基于有限体积法和Mixture 多相流模型,对比研究了圆柱弹、尾锥弹、尾翼弹和尾裙弹等4 种不同尾部形状结构射弹入水尾拍运动特性,发现4 种尾部形状结构射弹均具有“固有尾拍运动状态”,即射弹角速度振荡曲线的包络线与初始角速度和初速度无关,而与弹体外形有关,并给出了相同工况下射弹所受力矩和衰减速度的变化规律。
为了获得质心位置对超空泡射弹射程的影响特性,古鉴霄等[39]采用VOF 多相流模型和刚体六自由度模型开展了射弹入水数值仿真研究,结果表明,在保证尾拍力作用点位于质心之后的前提下,随着质心后移,射弹俯仰角幅度减小,射弹能耗减小,进而增加射弹射程;增加质量可以减小射弹能耗,也可增加射弹射程。为了获得初始运动扰动对射弹尾拍运动的影响特性,诸多学者开展了大量关于初始扰动角度和角速度对尾拍运动影响的研究。赵成功等[40]的研究表明,随着初始扰动角度的增加,俯仰角最大幅度和变化频率增大。姚忠等[41]发现随着初始扰动角度的增大,尾拍次数增加,俯仰角速度振荡周期减小,此外,还发现射弹弹道位移与初始扰动角速度相关,在较大或者较小的扰动角速度下(文中研究工况下的临界初始扰动角速度为10 rad/s),随着射弹的不断运动,质心偏移量越来越大。李佳川等[42]分析了初始扰动角速度对射弹尾拍运动的影响,分析结果表明,随着扰动角速度的增加,射弹尾拍次数增加,尾拍发生时间提前。
2 串并列入水
为了提高对水下目标的打击精度和毁伤效果,高速射弹通常采用多发连续攻击的作战模式,这将涉及多运动体入水过程相互干扰问题。超空泡射弹在高射频连续发射时,多发射弹入水产生的超空泡流场发生相互作用,引起复杂的水动力特性,使得超空泡射弹的运动特性受到干扰,与单发超空泡射弹入水的多相流动特性和射弹的运动特性有显著的区别。根据运动模式可分为并列入水及串列入水2 种。
2.1 并列入水
射弹并列入水包含同步并列入水和异步并列入水2 种模式。Wu 等[43]基于边界元方法和势流理论研究了楔形体同步并列入水问题,发现2 个楔形体的相互作用对入水面的影响有限,而严重影响压力分布。这一现象也被Yousefnezhad 等[44]发现。针对球体外形,王旭等[45]开展了不同间距的同步并列入水研究,发现内侧空泡径向尺寸发展受阻,2 个球体各自产生的空泡呈现非对称特性,但2 个空泡在空间上呈现良好的镜面对称特性。当间距较小时,2 个空泡尾部发生融合形成臼齿形空泡,随着空泡的发展,2 个空泡的尾迹靠近并发生融合(如图3 所示)。当间距大于5.5D 时,2 个空泡的相互作用微乎其微,其中D 为射弹最大直径。王辰等[46]数值研究了0.5D 和3D 两种弹丸间距对同步并列射弹入水弹道影响特性,发现弹丸间距较小时,内侧空泡受到压缩,内侧空泡直径小于外侧空泡,产生指向弹体外侧的横向力,导致并列射弹远离。间距增加至3D 时,两弹间的干扰可忽略。针对圆柱体外形,Mnasri 等[47]采用动网格技术构建了并列圆柱体入水的二维数值模型,发现与单个圆柱体入水相比,并列圆柱体入水引起更大的喷溅射流。卢佳兴等[48]开展了圆柱体同步并列入水实验,发现双空泡在空间上呈现对称特性,但受相邻空泡的影响,单个空泡表现强非对称特性。此外,宋武超等[49]基于势流理论,引入有势壁面和影响函数建立了并列入水过程理论数值模型,同样发现了双空泡在空间上存在镜面对称特性的现象。路丽睿等[50]发现在圆柱体同步并列入水过程中出现圆柱体偏转现象,圆柱体非对称空泡诱导的非对称流体动力和圆柱体尾部撞击力是圆柱体发生偏转及横向位移的原因。
国内外学者针对异步并列运动体入水问题开展了大量研究。张鹤等[51-52]对圆柱体低速异步并列入水进行了实验,发现受次发弹的影响,首发弹产生的内侧空泡受挤压作用更大,空泡表现非对称特性,导致空泡闭合时间提前;入水间隔的增加减弱了侧向扰动对首发弹空泡的排挤作用。闫雪璞等[53]采用VOF 多相流模型和重叠网格技术研究了超空泡射弹异步并列入水流场及弹道特性,与同步并列射弹相比,异步并列射弹的次发弹冲击载荷降低,并随着初始纵向间距增加次发弹入水冲击载荷降低;受首发弹影响,次发弹内侧水流流速增大,压力降低,空泡径向膨胀,两发弹空泡在尾部发生融合;纵向间距为0.5 倍弹长,在次发弹头部高压的影响下,首发弹内侧空泡缩小,并导致弹体部分沾湿;当纵向间距过大时(文中研究工况下,此值为3 倍弹长),次发弹进入首发弹空泡内,会发生失稳现象。黄海龙等[54]设计了并列射弹水平入水实验装置,针对3 种弹体外形开展了不同空化器直径和弹体径向间距的并列射弹入水实验,发现空泡出现穿越、吸引及截断等3 种空泡耦合现象。当首发弹生产的空泡尺度足以包裹次发弹时,则发生次发弹穿越首发弹空泡现象;并列射弹尾部的脱落空泡出现相互吸引现象,与射弹间距及空泡尺寸有关,吸引现象是由两空泡中间流体速度增大、压力减小导致的;并列射弹存在前后间距时,首发弹受到次发弹空泡扩张的挤压影响,容易形成截断。
1.8 GO、KEGG富集分析及GSEA 利用R软件clusterProfiler包[13]对得到的枢纽模块中基因进行GO富集及KEGG通路分析,错误发现率(false discovery rate,FDR)<0.05被认为具有统计学意义。另外将测试集GSE73731中265例肾透明细胞癌样本根据枢纽基因表达值中位数分成高低表达两组进行GSEA[14],选择c2.cp.kegg.v6.0.symbols.gmt作为参考基因集,FDR<0.05被认为具有统计学意义。
运动体并列入水问题的研究仍处于起步阶段,对于并列运动体入水的研究多基于低速工况下开展,关于两弹间不产生相互干扰作用的间距,未得到统一的判定标准。射弹的相互干扰不仅与间距有关,还受到运动体尺寸、速度以及发射间隔等因素影响,这将是未来的重要研究方向。
2.2 串列入水
关于串列射弹入水的研究相对较少。Yun 等[55]实验研究了高速球体串列入水空泡形态演变特性。首发弹垂直进入静止水面,球体头部触水产生与球体下表面相切的向上喷溅射流空泡,次发弹进入首发弹入水引起的向上喷溅射流空泡,并且由于次发弹下表面与向上喷溅射流空泡的接触面更大(如图4 所示,图中,U0为球体1 入水速度,U20为球体2 入水速度,v1为喷溅射流速度),因而产生相比于单弹入水更大的空泡。随着入水深度的增加,首发弹脱落的尾迹气泡干扰流场,导致次发弹生成的空泡发生畸形并最终脱落及溃灭,随后次发弹产生新的空泡。此外,Yun 等[56]还通过实验研究了高速球体串列斜入水空泡演变特性,由于次发球体的撞击,首发球体加速导致空泡径向尺寸瞬间膨胀,在运动过程中观察到两球体的多次撞击现象。周东辉[57]数值研究了串列射弹入水特性,发现次发弹进入首发弹形成的空泡内,次发弹由于阻力减小,撞击首发弹,但是研究中并未考虑碰撞分离。余德磊等[58]开展低速回转体串列入水实验研究,随着入水初始间距增大,回转体串列入水依次出现4 种运动模式: 碰撞扰动、封闭空腔扰动、过渡扰动和弱扰动,结果如图5 所示(图中,δmin为尾空泡最小半径)。受首发弹对自由液面的扰动及脱落空泡的影响,次发弹的运动特性表现出更为复杂的运动特征。何春涛等[59]实验研究了小、中、大3 种间距串列射弹入水空泡演变特性,结果发现: 间距较小时,后发弹进入前发弹空泡内,两者发生撞击导致射弹弹道改变;当前发弹空泡闭合于水面时后发弹入水,则弹体运动于首发弹尾流区中而形成不稳定气泡,并在首发弹尾部脱落气泡的影响下失稳。
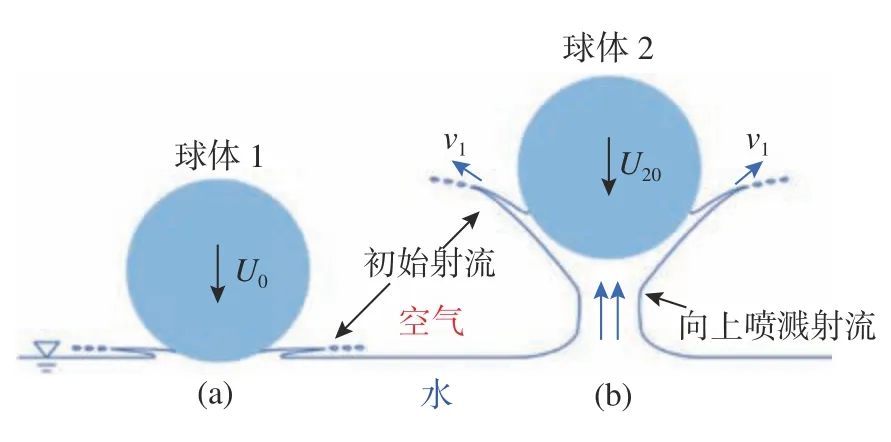
图4 向上喷溅射流空泡图Fig.4 Diagram of cavity upward jetting
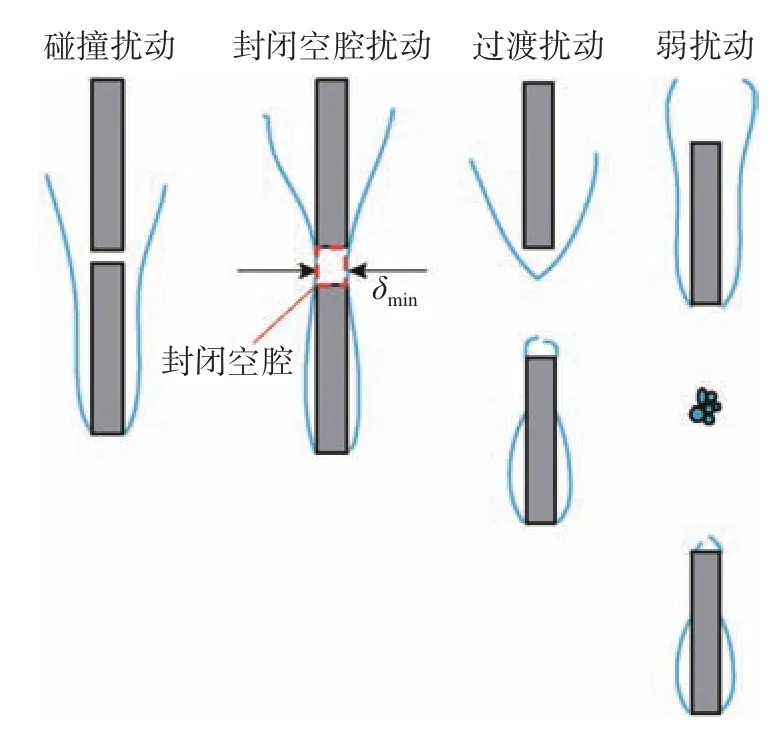
图5 串列射弹运动模式Fig.5 Motion pattern of projects in tandem
当前对串列入水的研究对象多为圆柱体和球体等简单外形,研究速度较低,通常不超过40 m/s,对串列航行器之间的空化流场影响作用机制的认识尚不够透彻。复杂外形航行器的高速串列入水空泡演变特性及航行器弹道特性将是接下来的研究重点。多发(2 发以上)串列射弹连续发射的入水弹道特性也是未来需要重点关注的问题。
3 高速航行器高速入水降载
航行器高速入水过程的巨大冲击载荷有可能使航行器头部结构破坏,影响航行器入水弹道特性,甚至导致航行器运动失稳。目前已开展了大量航行器入水冲击载荷特性的研究,形成了较为完备的冲击载荷理论预估模型[60-62]。为了保护航行器内部部件免受冲击载荷的破坏,需要采取缓冲手段降低航行器高速入水冲击载荷。常见的缓冲措施是在航行器尾部增加降落伞或气囊[63-65]。由于降落伞或气囊的特殊性,航行器入水过程较为复杂,为此又发展出了外形降载、头部降载杆降载、缓冲头帽降载及喷气降载等降载方式。
3.1 外形降载
外形降载主要是通过改变导弹等航行器外形来降低入水载荷的冲击峰值。石汉成[66]研究了半球形、锥形、斜锥形和平头半球形等4 种不同头型对航行器入水冲击载荷的影响特性,分析发现,头部为斜锥形的结构可以达到较好的降载效果。卢丙举等[67]评估了空化器直径对航行器入水降载的影响特性。Guo 等[68-69]研究了4 种头部外形对超空泡运动体水平入水冲击载荷影响特性。定义了描述头部外形的参量CRH(caliber-radius-head),即CRH=S/D,其中,S 为头部纵剖面轮廓曲线半径,D 为运动体直径。结构示意图如图6 所示(图中,L1为弹体柱段长度,L2为弹体头段长度),4 种头部外形的CRH 值分别为0.5,1.0,2.0 和3.0。结果表明运动体入水载荷随着CRH 的减小而降低。
图6 半球头型射弹示意图Fig.6 Diagram of hemispherical nose projectile
3.2 头部降载杆降载
杨宇[70]在航行器头部增加细长杆以形成包裹弹体的空泡,从而极大地降低了航行器入水时与液体的接触面积,获得了理想的降载效果(如图7所示)。随着降载杆长度L 的增加,降载率先增大后减小。降载机理是杆头部端面入水时空气层将持续时间较短的载荷分散,使之较为平坦,持续时间增长。加装降载杆属于较为新颖的降载方式,但也存在以下问题: 1)航行器在空中飞行阶段,降载杆势必会对航行器空中飞行的气动性存在负面影响,圆柱杆的非流线结构不利于在空中飞行;2) 航行器完全入水后降载杆同样对稳定运动存在不利影响。
图7 附加细长杆的航行器入水历程Fig.7 Entry process of vehicle with a slender rod attached
3.3 缓冲头帽降载
Hinkley[71]于1975 年首先提出了加装头帽来降低运动体入水冲击载荷的措施,缓冲头罩为硬质聚氨酯泡沫。与降载杆相比,缓冲头罩高速入水时,受入水冲击力的影响而结构破坏解体,因而不会过多影响航行器的入水运动姿态。其降载机理是: 航行器入水时导流罩破碎,缓冲材料压缩吸能,可有效降低航行器入水冲击载荷。宣建明等[72]研究认为缓冲头帽降载原理有两个方面: 一是导流罩的破碎对液面产生足够大的扰动,后续航行器头部接触水面相当于二次入水;二是内部的泡沫铝板可以有效降低压力峰值。徐新栋[73]进一步解释了头帽的双重作用,并给出头帽破损的3 种机制,即拍碎、撑碎和弯碎,并针对拍碎和撑碎2 种破碎方式给出了相应的应对策略。王永虎等[74]设计了头罩装置的整体结构,并改进了传统泡沫塑料的力学特性,重建了降载材料的本构关系式。Robert 等[75]通过改进设计,在头罩中加入填充泡沫塑料组成复合结构。Wu 等[76]数值研究了圆柱体头罩的减阻特性,发现在入水速度和头罩尺寸不变的工况下,存在最佳头罩材质密度。Shi 等[77]基于显式有限元方法和任意拉格朗日-欧拉(arbitrary Lagrange-Euler,ALE)算法数值研究了缓冲头罩高速入水的降载特性,定量评估了缓冲头罩在不同入水角时的降载效果,发现航行器垂直入水时,缓冲头罩的降载效果最佳。以上研究的缓冲材料采用的都是单层结构。施瑶等[78]设计了一种梯度密度式缓冲头帽(如图8 所示),采用ALE 算法分析了分层缓冲件的降载特性,相比于单层缓冲件,分层缓冲件吸能效果更好,表现出更好的降载效果。
图8 梯度密度式缓冲头帽结构示意图Fig.8 Structure diagram of gradient density buffer head cap
3.4 喷气降载
喷气降载的原理为在导弹等航行器即将接触水面时,从头部喷射气体形成气体射流,从而减小水冲击载荷与空泡载荷。张学广等[79]研究了一种头部有空腔的结构,在入水时会产生空气垫效应,可以有效降低入水冲击载荷;潘龙[80]研究了运动体头部持续不断的向外喷射非凝结气体,在即将入水时对水面产生扰动,从而获得了有效的降载效果。刘华坪等[81]得到了喷气量及入水速度对入水冲击载荷的影响特性,随着通气量的增加,降载效果增加。航行器头部喷射气流降载方法有一定局限性,对于高速大尺度航行器入水而言,若要获得良好的降载效果,需要的喷气量巨大,难以在工程实践中应用。赵海瑞等[82]提出带圆盘空化器的侧向喷气装置,可一定程度上减小高速航行器与水的接触,从而降低入水载荷。
4 工程实践
借助超空泡减阻技术,水下超空泡航行器犹如飞行在空中一样,航速大幅度提高。“暴风雪(SHKVAL)”超空泡鱼雷的问世标志着水下武器迎来了流体动力布局和动力推进方式的技术革新(见图9(a))。“暴风雪”超空泡鱼雷航速达200 kn,是常规鱼雷的3~4 倍,凭借无与伦比的航速优势,可以轻易突破敌方防线,成为对抗航母等大型水面舰的杀手锏。德国研制了具备机动控制及制导功能的超空泡水中兵器—“梭鱼”反鱼雷鱼雷(见图9(b))[83],其采用圆锥空化器和扩张尾段的布局模式,可以实现200 kn 的高航速和100 (°)/s 的强机动能力。对于跨介质超空泡航行器的工程应用,主要是小尺度的超空泡射弹,最典型的为美国诺斯罗普·格鲁门公司研制的机载快速灭雷系统(remote airborne mine clearance system,RAMICS),如图10 所示。该系统安装在MH-60S 直升机上,其发射的弹丸速度高达1 450 m/s,最佳入水射角为45°~60°,集瞄准、发射与火控系统于一体。特殊尾翼结构的弹丸结构如图11 所示。美国海军已于2007 年将RAMICS 装备部队进行使用和评估,形成初始作战能力。2012 年,DSG 防务公司展示了一种多口径超空泡弹药,其对发射系统无特殊要求,既可从水下发射,亦可从空中发射,部分弹丸结构如图12 所示[84]。
图9 超空泡鱼雷Fig.9 Supercavity torpedoes

图11 美国水下超空泡射弹Fig.11 American underwater supercavity projectiles

图12 DSG 防务公司研制的超空泡弹丸Fig.12 Supercavity projectiles developed by DSG
5 结论
文中对跨介质航行器高速入水空泡形态及运动特性、串并联射弹入水多相流动特性、高速航行器入水降载相关的试验及数值仿真研究工作进行简要总结与分析,考虑到跨介质入水问题的复杂性、学术意义以及实际应用需求,将该领域未来研究的重要方向归纳为以下几个方面。
5.1 复杂海况力学环境下高速超空泡射弹入水机制
海浪造成的海面波动将导致超空泡射弹入水过程产生强非线性扰动,使射弹入水姿态角发生改变,进而影响入水过程的运动稳定性。此外,当前的研究大多集中于亚音速射弹入水问题,跨声速运动产生的激波影响运动体附近空泡形态及流体动力,水的可压缩性对空泡形态的影响也越来越显著。研究复杂海况、水中跨声速运动对入水空泡形态及射弹稳定航行将是未来超空泡射弹工程应用的必要基础。
5.2 高密集跨介质武器连续发射入水运动机制
高密集连续发射超空泡射弹是形成对水下目标高效能打击威慑的有效手段,然而多发射弹串列或并列入水时射弹之间将存在复杂的相互干扰作用,先发射弹不可避免地改变了后序射弹的流场环境,致使串列或并列射弹入水存在运动失稳问题。国内外针对这一问题的研究还较少,深入剖析高密集射弹串并列连续入水的多弹体影响机制,预示空泡形态及流体动力演变特性,提出多弹体稳定航行发射策略是高密集跨介质连续入水装备工程实现必须突破的核心关键技术。
5.3 大尺度航行器高速入水降载技术
当前对大尺度航行器高速入水冲击及降载方面的研究还很少,现有研究入水速度相对较低。高速大尺度航行器在入水过程中产生巨大的冲击载荷,特别是小角度倾斜入水时,径向冲击载荷产生的巨大弯曲力矩对航行器结构设计提出了巨大挑战。研究大尺度航行器高速入水降载技术是未来高速大尺度跨介质航行器实践进程中需首要解决的技术难题及研究热点。
以下一些问题同样涉及到航行器跨越气/水介质多相流动力学问题,如反复跨介质出入水航行器、近水面滑飞航行器、潜射武器出筒及出水过程,带有弹性附体的航行器落水过程,以及空间返回舱水面回收过程等也是跨介质多相流领域未来需要关注的重点。
猜你喜欢
数字海洋与水下攻防(2021年2期)2021-05-08
数学大王·低年级(2021年4期)2021-04-27
消费电子(2020年5期)2020-12-28
哈尔滨工业大学学报(2020年12期)2020-12-14
水下无人系统学报(2020年2期)2020-05-13
舰船科学技术(2019年11期)2019-12-03
池州学院学报(2017年5期)2018-01-23
系统工程与电子技术(2016年2期)2016-04-16
船海工程(2015年4期)2016-01-05