
类Clipper 再入返回飞行器气动特性分析
2023-03-15 02:05陈华健李广兴侯小娟
上海航天 2023年1期
陈华健,李广兴,陈 辉,侯小娟
(上海宇航系统工程研究所,上海 201109)
0 引言
随着世界各国航天活动的深入与发展,传统航天器将无法满足未来高密度的发射需求。设计新型高效低廉的运输工具,研制新一代载人天地往返运输系统已成为人类不断追求的目标。从长远来看,航天运载器实现可重复使用是降低航天运输成本、提高运载能力和发射频率的必经之路[1]。美国、俄罗斯和欧洲都曾对可重复使用运载器进行了相关研究,包括航天飞机、“快船”(Clipper)返回舱和X-34、“云霄塔”(Skylon)等空天飞机设计方案,并取得了一定的成果[2]。
目前,传统一次性使用的飞船使用成本高昂,功能单一,远未满足低成本、可重复使用的未来航天发展需求。空间站下行、载人月球/火星探测和商业航天等任务对再入返回技术也提出了迫切需求,未来需要发展一种新型的返回飞行器,作为现有新飞船的有效补充。以Clipper 为代表的升力体式返回舱,气动效率介于升力-弹道式返回舱和带翼升力体轨道器之间,升阻比足以使返回舱进行大范围的机动滑翔,并可有效地降低过载峰值和热载峰值,维护方便、成本低廉,具有可重复使用的潜力,可作为未来再入返回飞行器的选择方案之一[3]。
因此,基于计算流体动力学(Computational Fluid Dynamics,CFD)技术,对类Clipper 体再入返回飞行器进行了数值模拟研究。首先,选取Clipper飞船返回舱作为研究对象,采用近似反设计方法,对飞行器气动外形开展几何建模;其次,研究飞行器在再入返回过程中,飞行包络内不同高度、不同马赫数(Ma)和不同攻角等流场条件下的气动特性,并进行对比分析;最后,在计算结果的基础上,结合流场特性,进一步探讨再入返回飞行器的飞行稳定性,以得出具有实际意义的结论,为类Clipper 体的再入返回飞行器设计提供一定参考。
1 几何建模与网格划分
“快船”研制方案主要分为2 种:1)升力体式外形,借助降落伞着陆;2)翼身组合体式外形,类似于航天飞机一样带有机翼,可在跑道着陆[4],如图1(b)所示。为了对“快船”基本构型的气动特性有较为全面的认识和了解,以便后续进行改型设计研究,主要参考升力体式Clipper 返回舱外形,根据其主要设计参数,采用近似反设计的方法,利用形状控制函数,基于圆锥曲线拼接的思想,将控制线函数封闭成统一的参数化截面形状函数,并动态调整控制参数,快速形成飞行器气动外形的参数化几何化建模[5]。
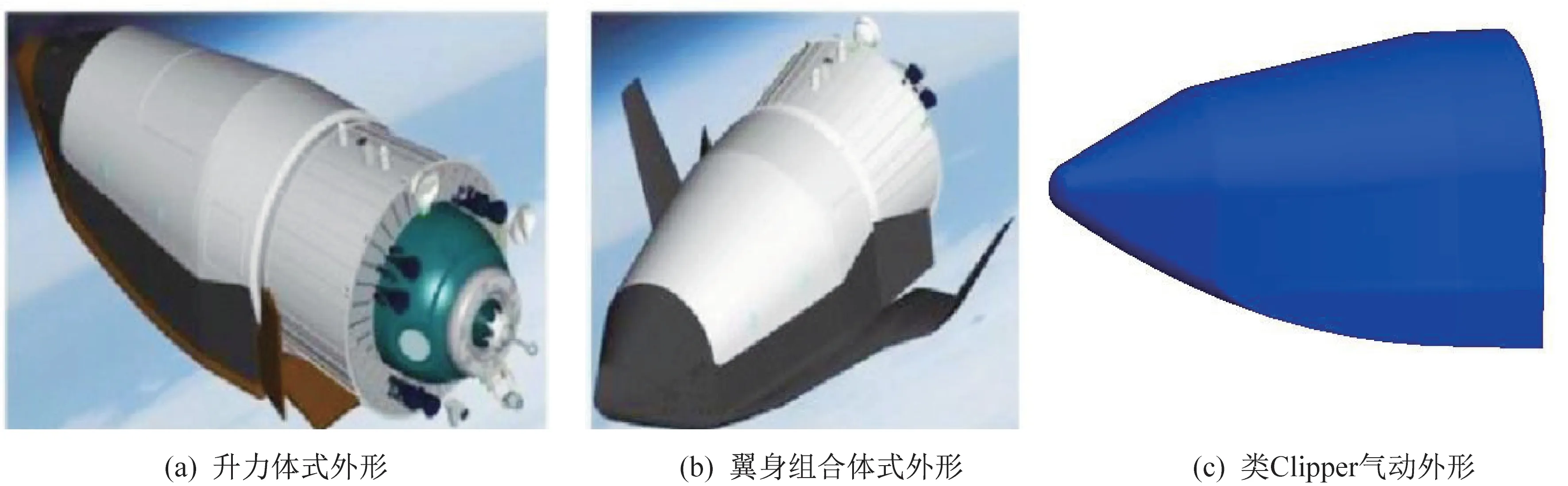
图1 类Clipper 飞行器几何外形Fig.1 Geometric configuration of the Clipper-like capsule
按照Clipper 外形的几何特征,以飞行器头部顶点O为原点,通过横、纵向剖面的曲线来描述整个三维飞行器。在XOZ纵向剖面中,Oa段为双曲线的一支(其渐近线倾角为θ1),ab段、bc段均为直线,ce段为半椭圆,de段 与bc段关于OX轴对称,Od段 则用抛物线表示;在YOZ横向剖面中,由pmq圆弧段、pf切线段、qg切线段和fg椭圆弧段(扁率e1)构成[6-7]。因此,整个飞行器参数化几何模型可通过θ1、R1、R2、R3、L1、L2、L3、L4、β和e1共10 个参数来描述。类Clipper 飞行器参数化几何模型如图2 所示。
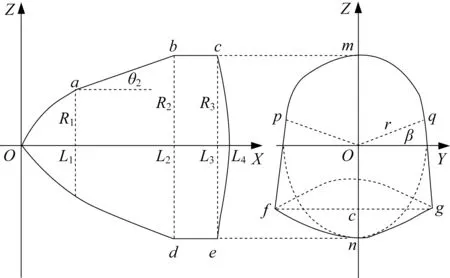
图2 类Clipper 飞行器参数化几何模型Fig.2 Parameterized geometric model of the Clipperlike capsule
在给定飞行器外包络、有效载荷、容积率等约束条件下,获得气动外形如图1(c)所示。由图1(c)可知,类Clipper 再入返回飞行器具有典型的钝头体特征,飞行器底面为过渡均匀的平滑曲面,飞行器上端面鼻锥部分、机身中端和尾部由不同坡角的曲面构成。飞行器质量为45 kg,质心设置在全长的1/2 位置处,几何模型特征量具体取值见表1,全长为1 126.73 mm。
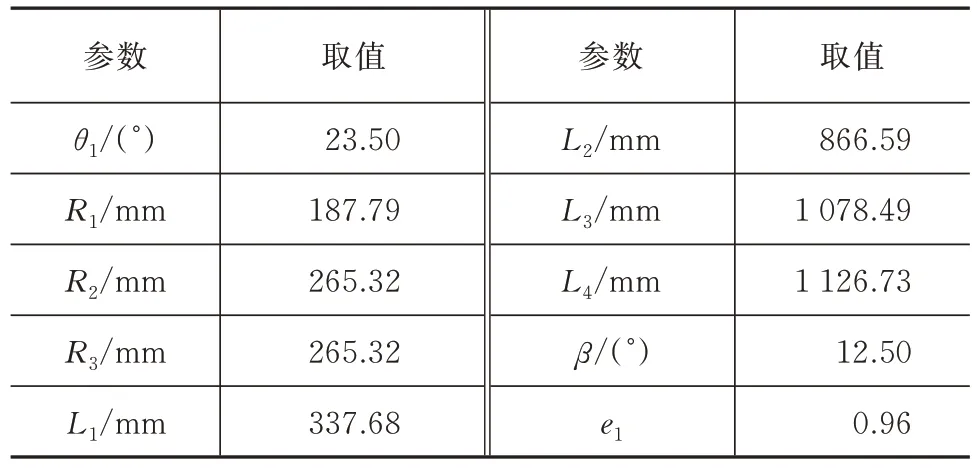
表1 几何模型特征量取值Tab.1 Characteristic quantity values of the geometric model
基于图1(c)再入返回飞行器的几何模型,采用非结构网格生成方法,同时为了保证计算结果的合理性与精确度,对飞行器头部端点、外形过渡段以及机身周围区域等地方进行网格局部加密设置。其中,由于研究对象具有良好的面对称性,计算无侧滑时只需对飞行器对称面一侧的流场进行网格划分。
整个飞行器计算域采用圆柱体,通过自动化网格生成得到网格文件,计算域包络范围长度根据飞行状态超声速和亚声速进行区分,如图3 所示。再入返回飞行器网格划分如图4 所示。由图4 可知,在飞行器表面形状变化剧烈的区域及机身周围进行了网格加密。
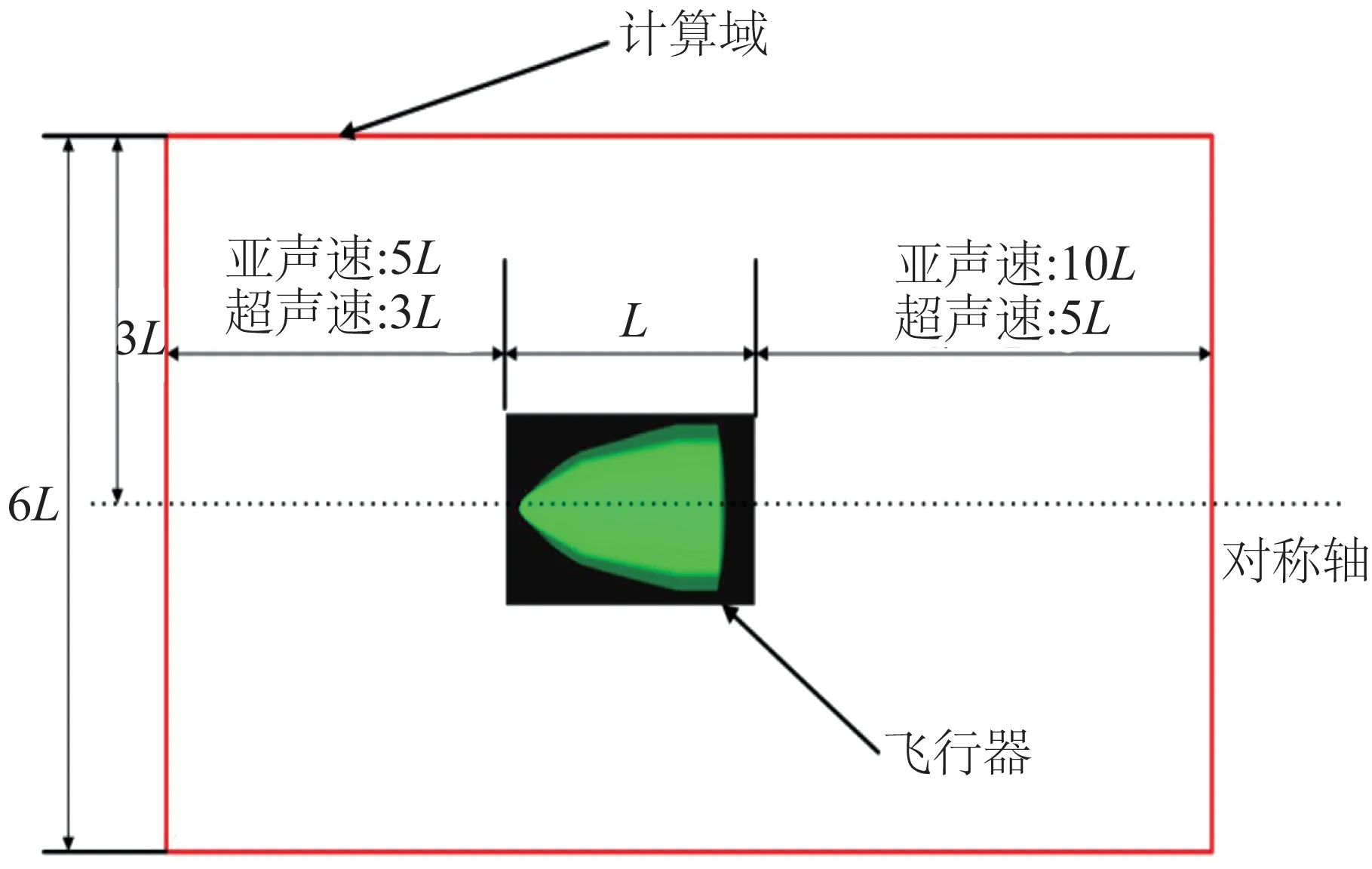
图3 再入返回飞行器计算域划分Fig.3 Computing domain partition of the re-entry return capsule
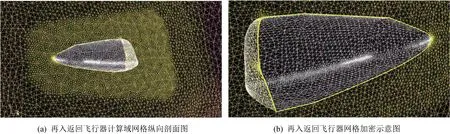
图4 再入返回飞行器网格划分示意图Fig.4 Grid partition diagram of the re-entry return capsule
2 再入返回飞行器气动力数值模拟与分析
再入返回器返回地球时,在不同飞行高度下会涉及自由分子流、过渡区、滑流区、连续区的流动状态和高超声速、超声速、跨声速、亚声速的流动速度的变化,其气动环境和流场结构十分复杂[8]。因此,采用CFD 数值模拟方法,针对类Clipper 返回舱外形的再入返回飞行器,探讨不同高度(h)、不同Ma和不同攻角(α)下的气动特性,并研究其流场规律。
2.1 数值计算方法
数值模拟应用目前使用范围最广的Fluent 软件进行仿真,通过求解三维Navier-Stokes 方程来计算返回器在大气飞行过程中的气动性能。采用有限体积法离散,湍流模型采用k-ωSST 模型以提高对流场特征的捕捉精度[9],选择密度基求解器和隐式耦合求解法,梯度计算基于格林-高斯函数方法。
为了验证计算结果的有效性,选择半锥角为θc=10°的尖锥标准模型(HSCM-2 模型)(如图5 所示)进行计算,并与风洞试验结果进行对比[10]。计算工况选择来流马赫数Ma=5,结果如图6 所示,其中CN 为模型法向力系数,CA 为模型轴向力系数。由图6 可知,数值模拟计算结果与文献[10]的风洞试验结果吻合较好,变化规律一致,与试验结果误差不超过5%。
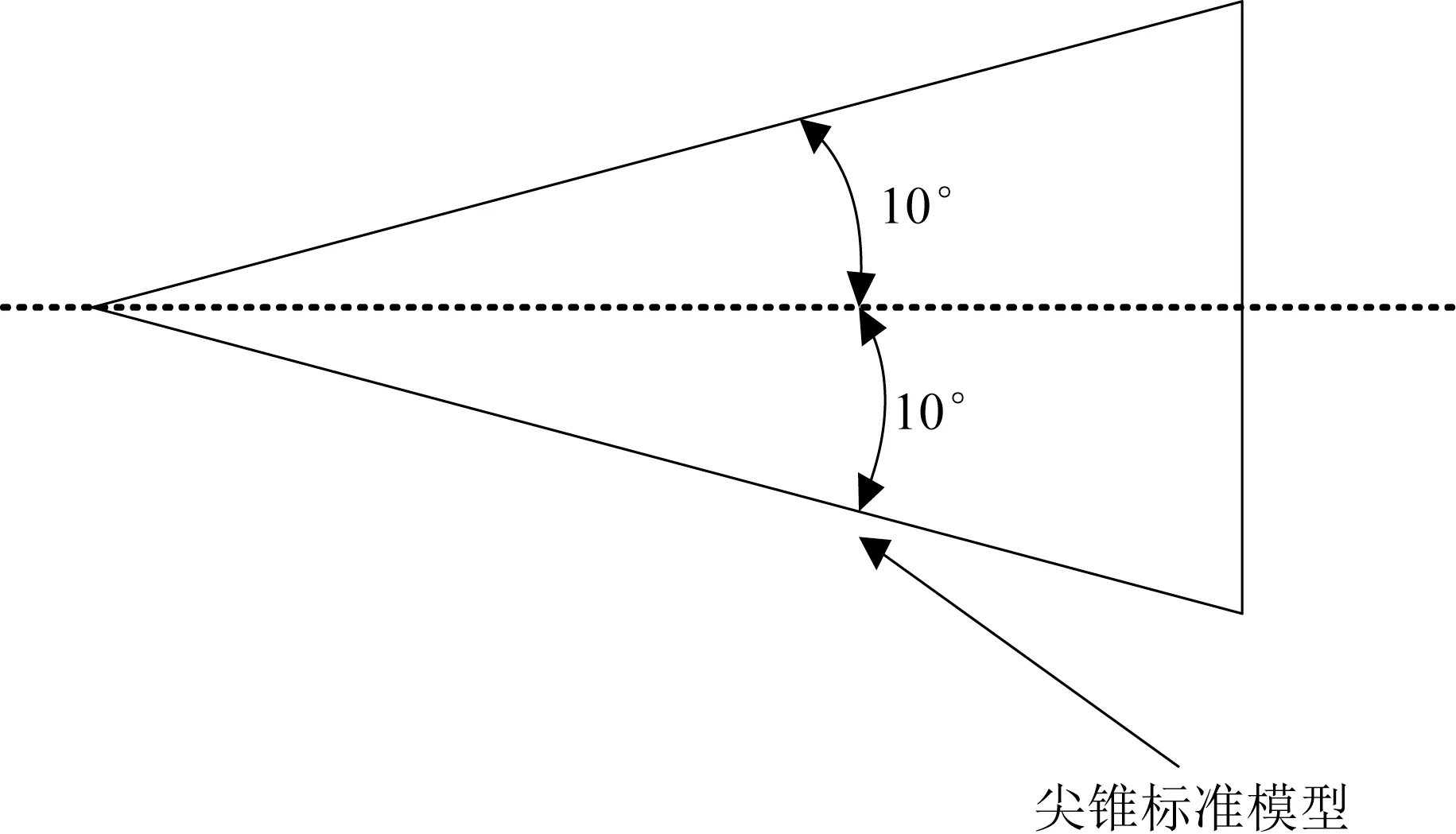
图5 10° 尖锥标准模型Fig.5 10° sharp cone standard model
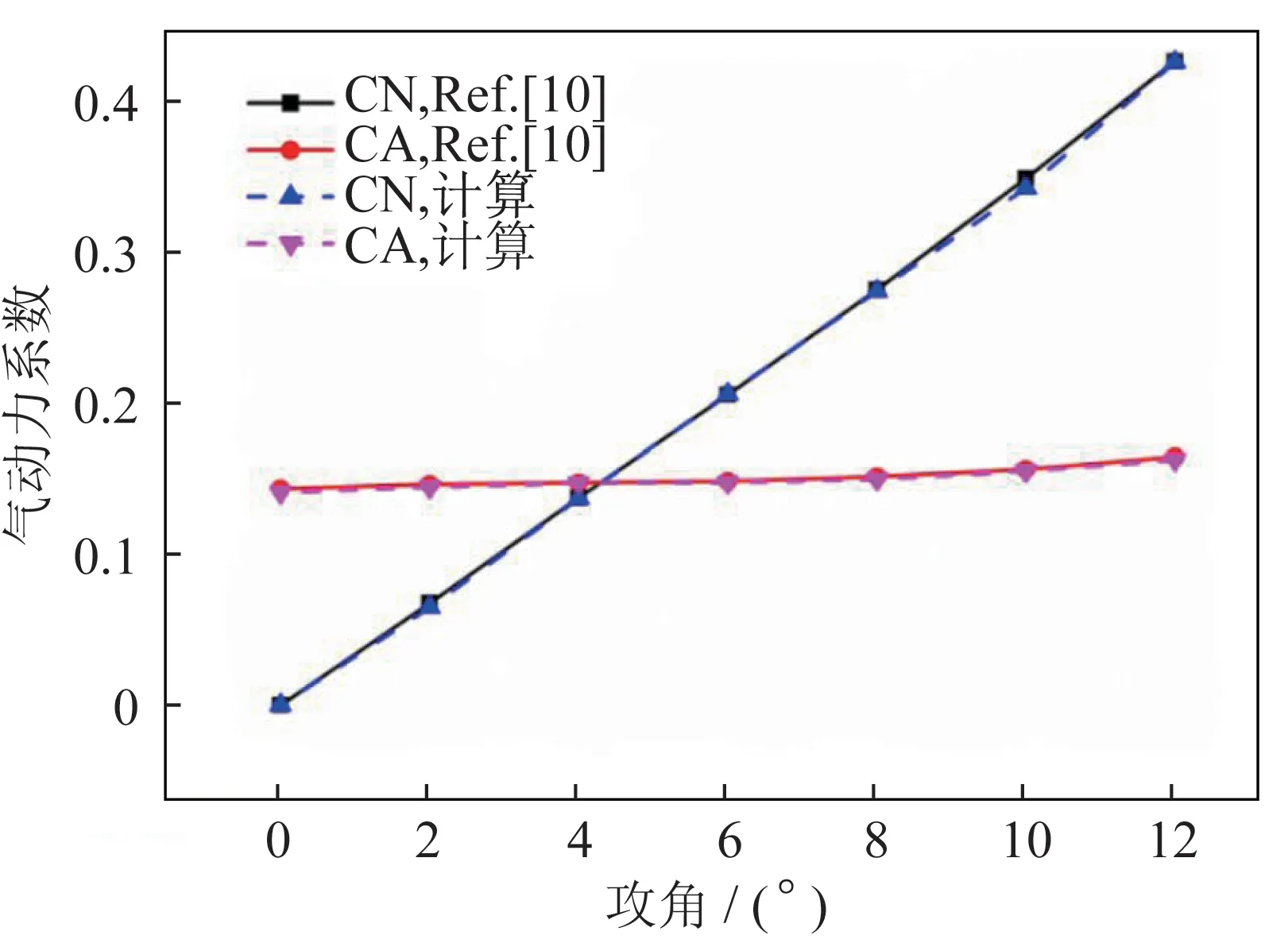
图6 计算结果对比Fig.6 Comparison of calculated results
2.2 再入返回器气动特性分析
为分析返回器在整个再入过程的气动特性,在飞行器再入返回的高度-马赫数走廊区间内适当取值,分别以10、25、36、50、80 和100 km 高度为研究目标点,最终选择飞行器的气动计算状态,见表2。
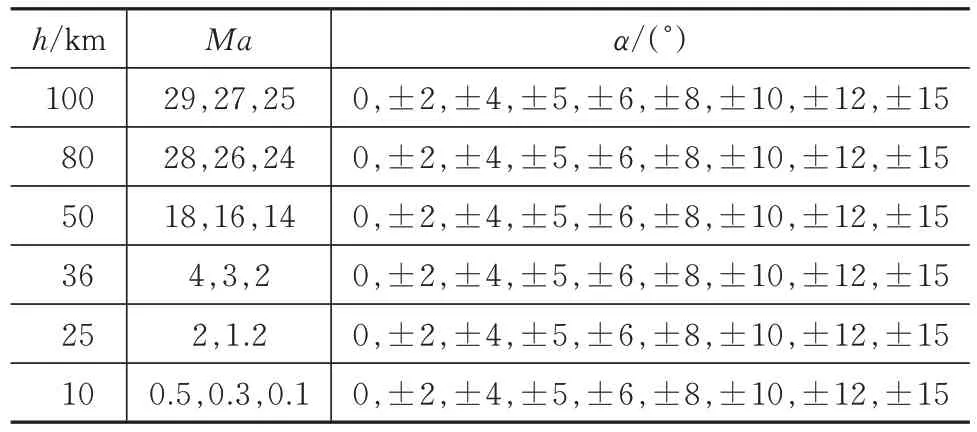
表2 飞行器的气动计算状态Tab.2 Aerodynamic calculation status of the Clipperlike capsule
高度为36 km 时,飞行马赫数Ma=4、攻角6°计算状态下的流场密度分布云图如图7 所示。由图可知,具有钝头双锥外形特征的类Clipper 再入返回飞行器在头部形成了一个弓形激波,这是超声速气流特有的现象。进一步分析发现,飞行器头部弓形激波[11]的迎风面会随着攻角的增大逐渐紧贴机身底部,背风面激波会逐渐远离机身表面[12]。

图7 h=36 km,Ma=4,α=6° 下的对称截面密度云图Fig.7 Density contours of the symmetrical section when h=36 km,Ma=4,and α=6°
该计算状态下,飞行器纵向对称截面的速度分布云图和流场流线分布如图8 所示。由图可知,飞行器的前端和后端是外形改变剧烈的地方,在这里气流方向产生变化,来流经机身头部向上下两侧偏折流动,该区域正是驻点所在的位置;待流过飞行器后,在其尾部形成一个回流区,气流流动方向与来流相反。该低速回流区会导致飞行器表面压力载荷分布发生变化,尾部流场环境相对复杂,对机体的气动特性可能会带来不利影响,整个流场特征与钝头体流场结构相似[13]。由于类Clipper 升力体式再入返回器需要借助降落伞系统来进行减速着陆,开伞通道位置的布置应尽量远离该区域,以避免受尾流的作用影响[14]。
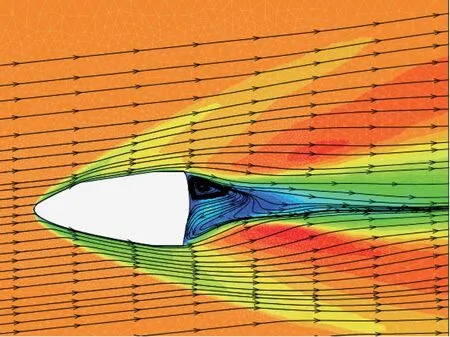
图8 飞行器对称截面速度分布云图和流线分布Fig.8 Velocity contours and streamline distribution of the symmetrical section of the Clipper-like capsule
不同流场条件下的类Clipper 再入返回飞行器气动力变化规律如图9 所示。计算结果表明:在不同高度和不同飞行马赫数下,飞行器的升力系数(cl)在α=±15°内均能呈现良好的线性变化,具有一定的正负对称性,最大升力系数可达0.65 左右;阻力系数(cd)在α=±15°内关于α=0°对称,大小介于0.4~1.0 之间;同时在α=±15°内,升阻比(cl/cd)在中低空能够达到1.10,在高空飞行(稀薄气体)时升阻比能够达到0.52,属于中等升阻比再入[15],且在α=15°内仍未达到最大升阻比。计算还表明,虽然在不同高度和不同马赫数流场条件下,再入返回飞行器的气动力变化规律比较一致,但相同高度、相同攻角下,马赫数对飞行器升力系数的影响较小,对阻力系数的影响较大。再入返回飞行器处于不同高度时,升力系数无明显变化,但高空飞行时阻力系数整体相对中低空而言会增大30%以上。
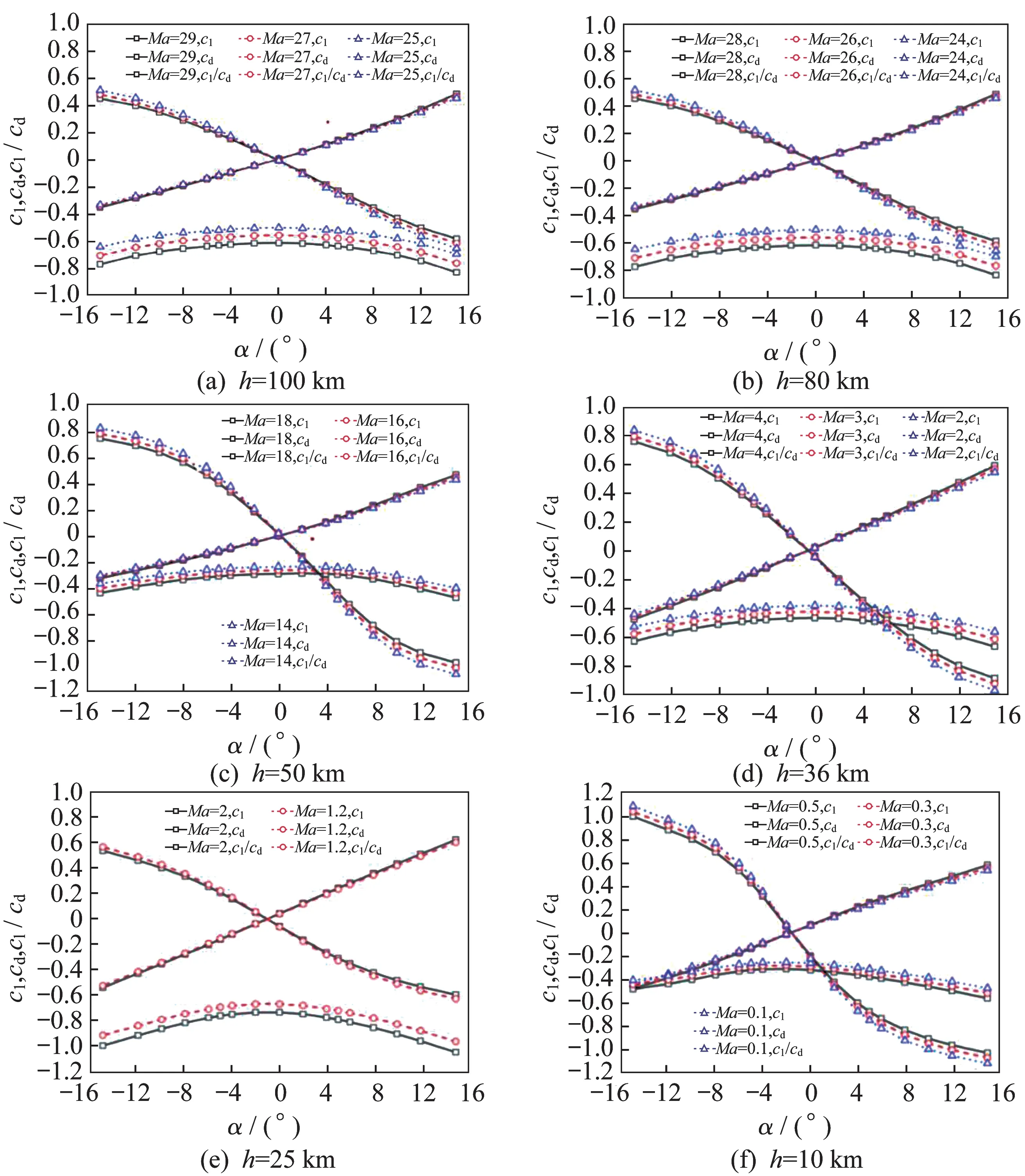
图9 不同流场条件下的气动力变化Fig.9 Aerodynamic changes in different flow fields
3 再入返回器飞行稳定性分析
在已知再入返回器质量分布特性的前提下,本章结合不同飞行状态下的压心位置给出了该飞行器在不同飞行高度、马赫数以及攻角下的静稳定度(τ)变化关系。静稳定度[16]关系式如下:
式中:xf为压心系数;xg为质心。
在不同高度和不同马赫数下,类Clipper 再入返回器静稳定度随攻角的变化规律一致,如图10所示。由图可知,该飞行器在正攻角状态下飞行时始终保持静稳定,当以较小负攻角飞行时会呈现出静不稳定性,当飞行攻角继续减小时又变成静稳定性。因此,类Clipper 再入返回器总体呈现良好的静稳定性。进一步分析发现,低空飞行时飞行器的静稳定的程度较低,马赫数对静稳定度的影响较小。
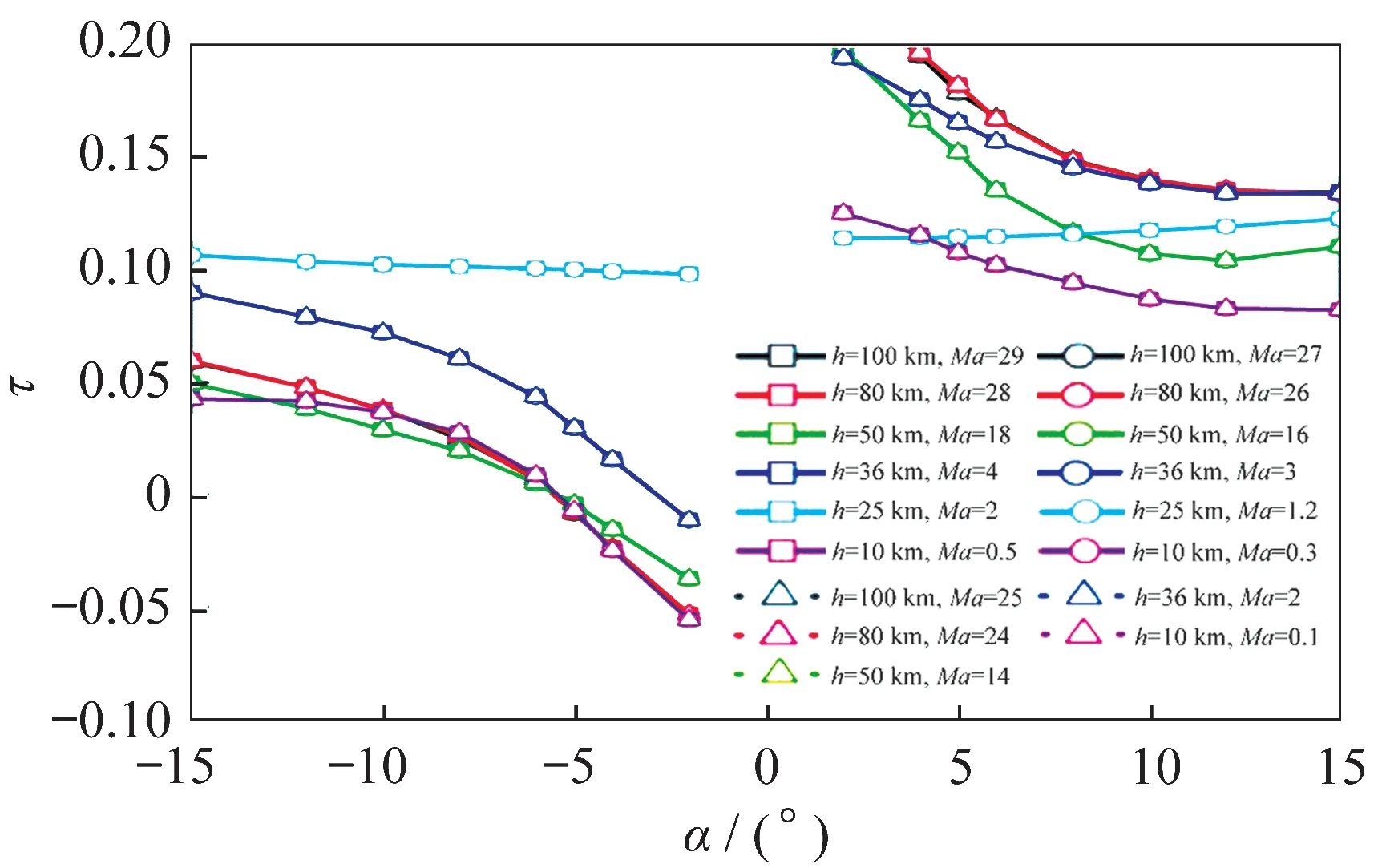
图10 不同飞行高度、Ma、攻角下的静稳定度变化关系Fig.10 Variations of static stability at different flight heights,Ma,and angles of attack
模拟了不同攻角扰动下、不同高度时的响应输出,见表3。

表3 攻角扰动输入条件Tab.3 Disturbance input conditions of the angle of attack
根据以上对再入返回器气动特性CFD 计算结果的分析,采用仿真验证该飞行器的纵向静稳定性[17],如图11 所示。

图11 攻角时间历程Fig.11 Time history of the angle of attack
从攻角时间历程上来看,类Clipper 再入返回器在飞行过程中能够保持纵向稳定,在不同高度下,飞行攻角因受到突然扰动而改变时,在不施加任何操纵控制的情况下,该飞行器都能够在一定时间内迅速收敛到配平攻角(约23°)。
4 结束语
针对升力体式再入返回飞行器的气动特性进行了研究,参考Clipper 飞船返回舱的外形,利用形状控制函数,给出了一种类Clipper 升力体飞行器气动外形,并基于高效的CFD 方法开展了再入返回过程中不同高度、不同马赫数和不同迎角下的全空域/速域飞行器气动特性研究,进一步分析了该飞行器的静稳定性,得到如下结论:
1)类Clipper 再入返回飞行器具有良好的升阻力特性,气动效率高,最大升阻比能够达到1.1 以上,属于中等升阻比再入;
2)类Clipper 再入返回飞行器在正攻角状态下飞行时始终保持静稳定,当以较小负攻角飞行时会呈现出静不稳定性;
3)类Clipper 再入返回飞行器在不同高度下飞行攻角因受到突然扰动而改变时,能够在不施加任何操纵控制的情况下保持纵向稳定;
4)类Clipper 再入返回飞行器具有升阻比高、稳定性好、机动性强的特点,可在未来作为具有可重复使用再入返回飞行器的选择方案。
猜你喜欢
军事文摘(2022年12期)2022-07-13
数学物理学报(2021年5期)2021-11-19
科学技术与工程(2020年30期)2020-12-04
宇航总体技术(2019年5期)2019-10-11
北京航空航天大学学报(2017年7期)2017-11-24
太空探索(2016年5期)2016-07-12
太空探索(2016年7期)2016-07-10
振动与冲击(2015年2期)2015-05-16
空气动力学学报(2015年3期)2015-04-14
实验流体力学(2013年2期)2013-09-21
