
基于无人机贴近测量的露天矿岩质边坡结构面自动识别
2023-03-15 05:55李杰林张良兵杨承业徐继业周科平
金属矿山 2023年2期
李 翠 李杰林 张良兵 杨承业 徐继业 周科平
(1.攀钢集团矿业有限公司,四川 攀枝花 617000;2.中南大学资源与安全工程学院,湖南 长沙 410083;3.金属矿山安全与健康国家重点实验室,安徽 马鞍山 243000)
结构面是岩体中强度较低的不连续面,是控制岩质边坡稳定性的重要因素,岩质边坡的变形和破坏通常都是受控于岩体介质特性并沿着岩体结构面发生的。在矿岩地质条件、开采扰动、外部风化条件等影响下,结构面力学性能弱化,导致岩质边坡发生滑坡、岩石块体滑落等灾害[1-3]。因此,精确获取岩质边坡的地形地貌及其岩体结构面参数是开展边坡稳定性分析与评价的基础[4-5]。
目前,针对露天矿山边坡地形测量及岩体结构面调查手段趋向于远程化与智能化,传统的人工接触式测量工作效率低,且受限于复杂地形限制,已逐渐被三维激光扫描、摄影测量等非接触式地质调查技术取代[6-8]。针对高陡边坡地势复杂险峻的特点,国内外许多学者利用无人机设备搭载激光扫描仪或摄像设备对边坡进行了测绘与分析,陈昌富等[9]利用无人机贴近摄影获取了边坡的岩体结构特征;JIA 等[10]利用无人机对露天高陡边坡进行了摄影测量,并利用数值分析方法获取了边坡岩体的稳定性;KONG 等[11]基于无人机摄影测量结合结构运动(SfM)技术,研究了高分辨率边坡数字模型生成方法;LIU 等[12]提出了一种将3D-DDA 与无人机摄影测量相结合的集成系统,用于块状岩体边坡的稳定性评价。基于无人机测量技术的优势在于不受岩质边坡的险要地形限制,可以充分获取研究区域的图像、结构及纹理特征,结合空中三角测量技术[12-13]可实现不同角度、不同方位的摄像信息的逆向建模,从而获取测量边坡区域的精细三维模型。
基于无人机测量所获取的边坡三维模型与点云数据,可以实现边坡岩体结构的三维数字化还原。随着计算机技术的发展,基于岩体结构数字模型开展室内岩体工程地质调查已成为主流的研究手段[14-17],相比于现场实地测量,可使得测量人员拥有更优良的工作环境、更清晰的观测条件,从而获取数据量更大且更精确的岩体结构面数据。同时现有的计算机算法可辅助测量人员开展工程地质调查,进一步增强了作业的速度与可靠性。因此,基于无人机测量数据的结构面信息提取是建立从无人机边坡测量到数字化建模,最后实现岩体结构数字化分析的关键。
为此,本研究基于无人机倾斜摄影测量与贴近摄影测量技术,进行露天岩质边坡测量,获取边坡点云模型,并开展基于点云数据的边坡岩体结构面识别研究,形成了一种基于无人机测量高精度点云数据的岩质边坡结构面自动识别方法,最后将该方法应用于攀枝花铁矿尖山矿区北部边坡。
1 无人机系统与边坡精确测量方法原理
1.1 无人机测量系统
基于无人机精确测量是开展露天矿岩质边坡结构面识别的前提,本研究采用了大疆精灵Phantom 4RTK 无人机开展了高精度的边坡摄影测量,如图1所示。

图1 无人机飞控系统Fig.1 UAV flight control system
精灵Phantom 4RTK 是一款小型多旋翼高精度航测无人机,具备RKT 厘米级导航定位系统和高性能成像系统,通过控制器可预设、调节机身的姿态、飞行轨迹、飞行速度以及摄像头的角度、拍摄频率,从而获取不同角度、不同分辨率的摄影图像。通过显示器可实时获取摄像头的回传影像以及飞机的飞行参数,从而控制无人机完成飞行测量作业。该无人机系统具有精度高、灵活、轻便以及测量速度快等特点,适用于小范围的岩质边坡精确测量。
1.2 岩质边坡无人机测量及建模方法
岩质边坡无人机测量及建模包括粗略建模与精细建模两个部分,粗略建模即利用无人机对研究区域的总体形貌特征进行还原,获取研究区的总体模型架构。精细建模则是在总体模型架构的基础上,通过特征匹配技术对模型细节进行补充建模,从而获取测量对象更精确的纹理结构特征。本研究通过DJI Terra软件实现基于无人机岩质边坡的粗、细建模,该款软件基于空中三角测量技术对粗、细建模的摄影图像数据进行耦合,实现更精细化的模型纹理及结构展现[13]。基于上述方法,本研究对无人机精确测量及建模的具体流程进行如下分析。
1.2.1 粗略建模
利用精灵Phantom 4RTK 无人机的倾斜摄影测量数据开展岩质边坡的粗略建模。首先,根据测量区域的工程资料,通过现场勘察确定区内地形及周边构筑物特征,开展无人机倾斜摄影的航线规划,设置无人机的飞行测量参数。飞行测量参数主要包括无人机的飞行高度、相机倾斜角度、图像重叠率等,精灵Phantom 4RTK 无人机即可根据航线及设置参数自动在边坡上方保持一定的高度开展倾斜摄影测量,如图2 所示。粗建模的主要目的是获取测量边坡区域的地形形貌特征,得到区域整体模型,进而得到边坡区域的模型架构[18]。

图2 无人机倾斜摄影测量示意Fig.2 Schematic of UAV oblique photogrammetry
1.2.2 精细建模
根据图2 可以看出,对于有高低起伏的边坡,无人机在倾斜摄影的固定航线上与边坡表面的相对高度会不断变化,所获取的影像分辨率同样存在差异,因此无人机倾斜摄影只能获取边坡的整体形貌,无法获取边坡复杂地形的高分辨率、精度均匀形态,对于结构面参数识别研究,需要高精度的边坡模型数据作为支撑。
利用无人机贴近摄影测量技术[19]进行无人机精细建模,如图3 所示。无人机贴近摄影测量的具体操作步骤为:①利用无人机对边坡表面进行近距离拍摄(5~50 m),同时保证无人机在竖直方向上的移动角度与边坡角β一致,并且无人机摄影云台的云台角β1与边坡角为余角关系(图3(a)),使得无人机在沿航线移动时机身与坡面距离保持不变,并且云台的摄影角度始终与坡面保持垂直;② 无人机沿着航线飞行摄影时的旁向重叠度不小于70%,航向重叠度不小于80%(图3(b))。通过无人机贴近摄影测量技术可使无人机贴合边坡表面的坡度获取高精度、高分辨率的数据,能识别出更精细的边坡坡面纹理与结构面信息,相对于边坡粗略模型可展现出更精确、全面的岩体结构。
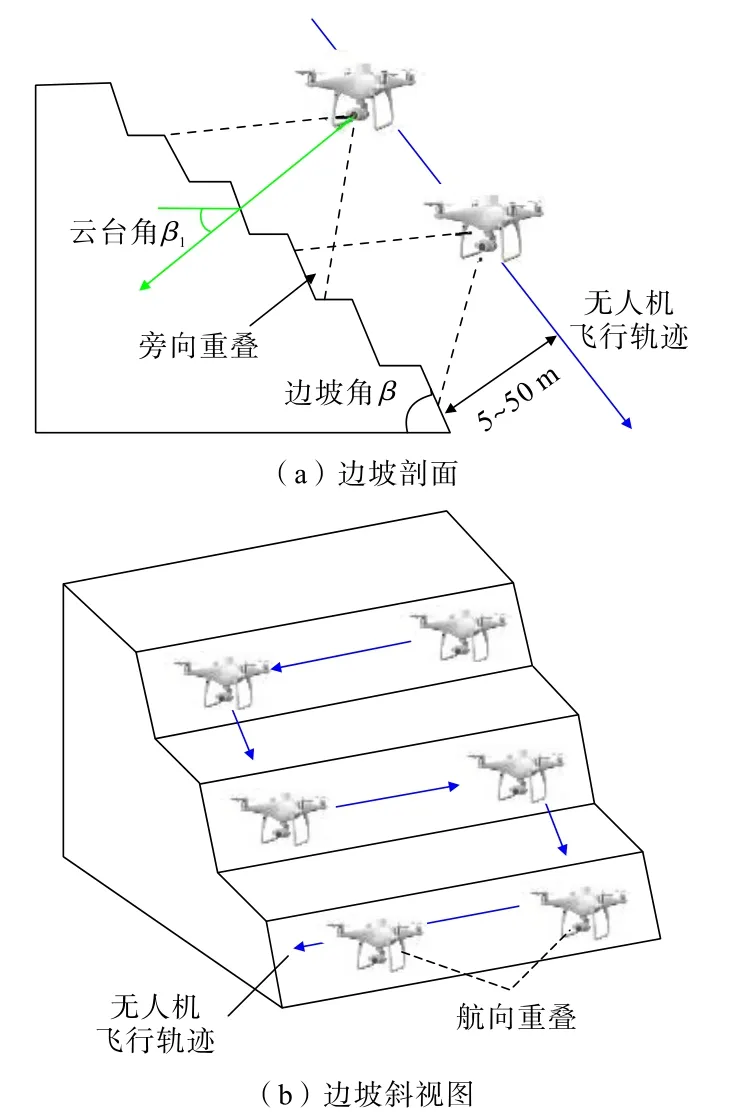
图3 无人机贴近摄影测量Fig.3 UAV Nap-of-the-object Photography
基于本研究无人机粗建模以及细建模流程,可获取研究区边坡的精密点云数据,该类点云数据具有精准坐标并能精确地反映边坡岩体的几何特征,从而实现了利用点云数据通过计算机程序进行边坡岩体结构面的几何识别。
2 基于点云数据的岩质边坡结构面自动识别
2.1 算法原理
基于无人机精确测量获得的点云数据可精确反映露天边坡岩体结构面的几何形貌特征,通过点云数据的平面分割算法即可获取边坡岩体结构面的信息。本研究主要采用区域生长法实现点云数据的平面分割,从而快速识别出岩质边坡点云数据中的结构面信息。
2.1.1 点云数据的体素滤波
通过无人机高分辨率摄像获取的点云数据通常较为密集且不均匀,使得点云数据平面分割计算的鲁棒性变差,点云数据的体素滤波即是对点云进行体素化,通过体素采样方式使得边坡的点云数据规模降低且平整化,而整体边坡的几何及拓扑特性基本不发生变化[20],如图4 所示。
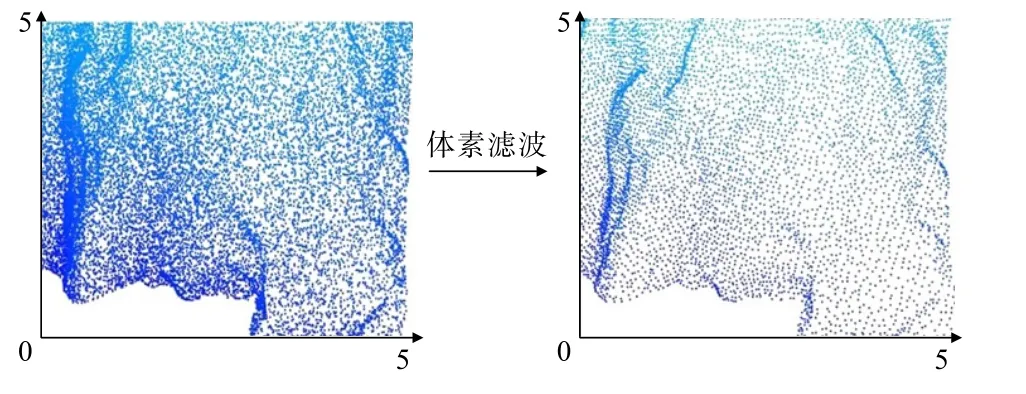
图4 点云数据体素滤波(单位:m)Fig.4 Voxel filtering of point cloud data
2.1.2 点云数据特征值提取
开展点云数据平面分割的前提是获取点云数据的特征值[21],包括点云数据的法向量n及曲率特征φ。点云数据的法向量n是进行点云平面拟合的关键,而曲率特征φ可以确定平面的起伏状态,从点云数据中识别具有一定粗糙度的结构面时,选取合理的曲率特征φ值十分关键。对于点云数据中单个点云数据的法向量,本研究通过近邻搜索算法将单个点云数据及其相邻的k个点云数据作为一个合集,设合集中包含i个点云数据,则点云合集在最小二乘意义上所表示的平面P可表示为
式中,p为平面P的法向量;d为平面P到坐标原点的距离;ei为第i个点云数据的坐标。
根据上述分析,可认为由点云数据集合构成的平面P的法向量p,是由单个点云数据的法向量n通过主成分分析法(PCA)[22]求解得到,具体思路是其通过分解得到点云合集方差矩阵的特征值来计算法向量p。点云合集方差矩阵M及其特征值具有如下关系:

式中,λi与vj(j=0,1,2)分别为特征值及特征值向量。
若特征值λ0<λ1<λ2,则特征值中的最小值λ0即为单个点云数据的法向量n,同样单个点云数据的曲率特征φ可由特征值计算得到:

2.1.3 区域生长法的点云数据平面切割与拟合
获取点云数据的单个点云数据法向量n及曲率特征φ后,即可通过区域生长法[23]进行点云数据的平面切割,从而实现不同产状结构面的分割识别,如图5 所示。区域生长法是通过设置初始种子点,利用点云数据的法向量n及曲率特征φ作为判断生长条件对种子点进行生长。若某一点云数据与种子点不属于同一平面,则其法向量与种子点法向量的夹角以及该点的曲率必然大于某一阀值,通过设置这一阀值即可限定种子点的生长边界,使得边界内的点云属于同一平面。

图5 区域生长法原理Fig.5 Principle of region growing method
区域生长法的具体步骤为:
(1)根据点云数据的曲率值对点云进行排序,将曲率最小的点叫作初始种子点。
(2)设置一空的聚类序列C和空的种子点序列Q,将选好的初始种子点加入种子点序列,并搜索该种子点附近的k个邻近点云数据。
(3)设置两个点云数据之间的法向量夹角阈值a以及曲率阈值b,计算k个邻近点云数据中每个点云法向量nk与种子点法向量n之间的夹角。当小于设定的法向量夹角阈值a时,首先将该点加入聚类序列C中,同时判断该邻域点的曲率值是否小于曲率阈值b,将小于曲率阀值的点云数据加入种子点序列Q中;然后在Q中重新选择新的种子点,重复上述步骤,直到序列Q为空。
(4)按照曲率从小到大排序,取不存在于聚类序列C中的点云数据重新作为初始种子点,重复步骤(1)至(3),可实现基于区域生长法的点云数据平面分割。
2.1.4 结构面产状计算
基于区域生长法的点云数据平面分割,可使得点云数据按照不同产状的平面实现分离,利用主成分分析法即可得到各结构面的法向量D(A,B,C),通过平面法向量与结构面产状的关系[24],即可计算出结构面倾角α与倾向β,公式为
一切仿佛是昨天,记忆是流淌的河,深入藏地,遇见他们让我感到无比幸福,那些鲜活的面孔伴随着朴素的名字,宛如河底多彩的石,闪动着美妙的色彩,萦绕在温暖的思绪里。至今我常去甘南草原看看,想念他们成了惯性,每画,总沉迷。
式中,T为角度常量,取值为
2.2 岩质边坡结构面自动识别方法
基于无人机倾斜摄影测量与贴近摄影测量获取的岩质边坡精细三维点云数据,结合上述点云数据的处理算法从而形成了岩质边坡结构面自动识别方法,如图6 所示。

图6 岩质边坡结构面自动识别方法Fig.6 Automatic identification method of rock slope discontinuities
3 工程实例
3.1 工程背景
攀枝花铁矿位于攀枝花市北侧,年产1 300 万t矿石量,是攀钢集团铁矿石原料生产的主要基地之一。该矿包括朱家包包矿区与尖山矿区两个开采区域,两个矿区之间沿东西走向相连,前期均采用露天开采。目前尖山矿区已转为地下开采,朱家包包矿区也转入深凹露天开采,两个矿区的最终露天边坡高达600 m,为典型的高陡边坡。由于节理裂隙的分布,在开采扰动、裂隙渗流、岩石风化作用等综合因素影响下,露天采场边坡时有发生滑坡及台阶垮塌等灾害,对露天矿的安全生产造成了重要影响,如图7 所示。

图7 攀枝花铁矿边坡滑坡灾害情况Fig.7 Landslide disaster of Panzhihua Iron Mine
3.2 无人机边坡测量及模型构建
本研究以尖山矿区北部边坡(图8)为例,开展基于无人机的精确测量作业。该区域主要岩性为辉长岩,边坡角约为45°,由于风化、地质作用已产生了严重的台阶垮塌,若采用传统的接触式结构面测量方式,不仅存在较大的安全风险,并且测量人员难以到达上部区域,采用三维激光扫描仪器则难以找到合适的架站点进行测量,因此该区域更适用于利用无人机进行测量。
测量时,首先预设4 个控制点,利用精灵Phantom 4RTK 无人机的五向飞行进行边坡整体区域的倾斜摄影,设置航向重叠度为80%,旁向重叠度为70%,无人机与边坡的相对飞行高度设置为200 m。根据测量结果,利用DJI Terra 软件得到研究区边坡的整体模型。根据粗略模型及现场勘查所反映的研究区形貌,考虑到区域覆盖的用电线路复杂,若采用线路规划的自动飞行进行贴近测量难度较大,因此本研究通过手动平飞方式进行边坡的贴近测量。无人机与边坡的垂直距离保持在30 m 左右,无人机的云台摄影角度设置为45°,可以看出,相对于边坡的粗略模型,通过贴近测量得到的边坡精细模型可以更细致地展现出边坡的纹理与岩体结构等信息(图8(a))。最后,基于无人机贴近测量得到的边坡精细模型,并通过DJI Terra 软件可输出研究区边坡的精密点云数据(图8(b)),坐标N 代表正北方向,研究区垂直坡高为93 m,水平长度为268 m。
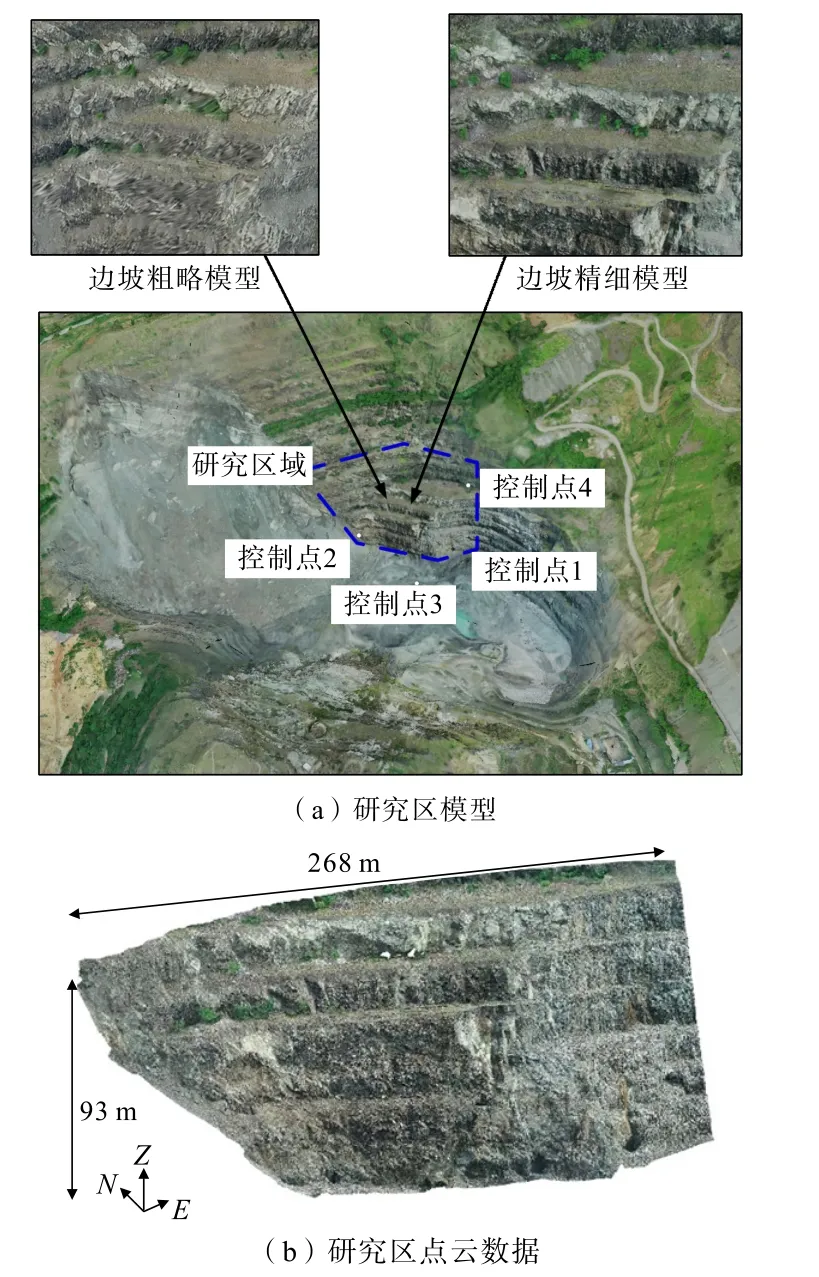
图8 研究区模型构建Fig.8 Model establishment of the study area
3.3 模型精度验证
3.3.1 边坡整体模型精度验证
基于4 个控制点对整体边坡模型的精确度进行验算,参考国家大地坐标系数学精度检测规范[25],本研究通过误差绝对值取平均来进行模型的精度检验,公式为
通过式(5)可计算出整体边坡模型的4 个控制点在X、Y、Z方向上的平均误差为ωx=0.93 cm、ωy=0.88 cm、ωz=1.03 cm,同时计算4 个控制点之间的平均距离误差ωd=1.13 cm。可以看出,通过无人机测量得到的整体边坡模型与实际模型坐标误差约1 cm,可以满足工程应用需求。
3.3.2 结构面识别算法精度验证
由于测量人员无法靠近研究区域,为验证结构面识别的精确度,选取边坡整体模型中已喷浆加固且较为平整的台阶坡面对结构面识别的准确度进行分析,结果如图9 所示。

图9 结构面识别算法精度验证Fig.9 Accuracy verification of structural plane recognition algorithm
该区域位于尖山矿区南部,由3 个坡面、1 388 m台阶和1 412 m 台阶组成,由于区域较为平整,且各个台阶与坡面之间的产状相同(图9(a)),可将坡面与台阶面视为平面。通过Python 编程进行结构面识别方法的功能实现,对验证区域的平面进行识别与分割,获得了研究区域的3 个坡面与2 个台阶平面的识别结果(图9(b))。将识别拟合的平面产状与现场罗盘测量结果进行比较(表2),可以看出采用区域生长法识别的平面产状与罗盘测量结果误差均在5°以内,可认为本研究采用的结构面识别方法精确性较好。

表2 结构面识别精度验证结果Table 2 Accuracy verification results of structural plane recognition
值得注意的是,在验证分析结果中,坡面与台阶之间转角处的点云数据未被区域生长法所采用,主要原因是该区域点云的法向量与曲率变化过于明显,从而导致不同平面之间的边界线存在取样误差。为此,在后续结构面识别时应尽可能选取同一坡面内的点云数据进行分析。
3.4 边坡岩体结构面识别
通过对模型与方法的精度验证,反映出本研究得到的边坡模型与结构面识别方法可满足研究区结构面调查需求,考虑到该区边坡风化较为严重,选取上部台阶岩体较完整区域进行了结构面识别分析,结果如图10 所示。采用上述结构面识别方法,在研究区共识别出1 536 条结构面(图10(a))。通过对优势结构组进行编录,结果表明,该区域辉长岩主要发育3 组优势结构面组:第1 组平均倾向为123.16°±22.64°,平均倾角为45.89°±18.25°;第2 组平均倾向为191.86°±25.24°,平均倾角为75.38°±23.19°;第3 组平均倾向为243.30°±18.29°,平均倾角为66.68°±23.76°(图10(b))。进一步分析可知:研究区岩体结构较为发育,在岩石风化、地质作用以及开采扰动的多重因素影响下极易发生台阶的垮塌破坏,在工程支护中需要重点进行加固和防范。

图10 研究区结构面识别与分组Fig.10 Identification and grouping of structural planes in the study area
4 结论
(1)利用无人机倾斜摄影测量以及无人机贴近摄影测量技术,实现了基于无人机的露天矿岩质边坡由粗到细、由整体到局部的精确测量,获取了精细的边坡岩体结构面点云数据模型。通过对点云数据进行体素滤波、特征提取等处理,利用区域生长法进行基于点云数据特征值的多平面分割,形成了一种基于点云数据的岩质边坡结构面自动识别与提取方法,通过该方法识别的平面产状结果验证误差均小于5°。
(2)根据所提出的岩质边坡点云数据结构面快速识别方法,以攀枝花尖山矿区北部边坡为例,利用无人机测量获取了该区域的精细三维模型与点云数据。基于边坡点云数据完成了边坡岩体结构面识别,获取了优势结构面的特征参数,为矿山边坡稳定性分析提供了基础数据。
(3)提出了一种通过无人机测量获取边坡点云数据、采用计算机算法在岩质边坡点云数据中自动识别结构面特征的研究思路,后期研究可以从提取结构面算法的鲁棒性与准确性方面开展深入分析,通过机器学习对结构面识别样本进行训练,解决算法对点云数据中的平面边界比较敏感的难题,从而获取更符合工程实际的结构面数据。
猜你喜欢
水利规划与设计(2020年1期)2020-05-25
甘肃科技(2020年20期)2020-04-13
中学生数理化·高三版(2019年1期)2019-07-03
智能城市(2018年7期)2018-07-10
江西建材(2018年2期)2018-04-14
试题与研究·高考数学(2016年1期)2016-10-13
河北地质(2016年4期)2016-03-20
肇庆学院学报(2016年5期)2016-03-11
水科学与工程技术(2016年6期)2016-02-27
长江大学学报(自科版)(2014年4期)2014-03-20
