
基于CNN的高速运动目标ISAR成像方法研究
2023-03-11 04:43:30李云涛郭永辉李永刚何永华柴恬怡
电光与控制 2023年2期
张 宇,李云涛,郭永辉,李永刚,何永华,柴恬怡
(航天工程大学,a研究生院; b.电子与光学系,北京 101000)
0 引言
为了达到突防的目的,现代飞行器速度越来越快,甚至达到马赫级别,而在逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)成像过程中,目标的高速运动易引起脉冲内距离走动,从而给成像带来困难。针对高速运动目标,传统成像方法是通过对线性调频信号的参数估计,构建补偿信号并对回波信号进行补偿,最终得到清晰的ISAR像[1]。然而解线调处理[2]、Radon-Wigner变换(RWT)[3]等传统的参数估计方法普遍计算复杂且误差大,从而导致参数估计后的ISAR成像效果差。因此研究高效的参数估计方法具有重要意义。
近些年,深度学习凭借优异的性能,在计算机视觉、智能控制、自然语言处理等领域被广泛应用。深度学习采用多层次网络提取图像的浅层特征,用网络权重和偏置的形式保存,并且不断向下传递和重新提取,从而得到抽象的高层特征,最终通过分类函数识别[4]。本文利用卷积神经网络(Convolutional Neural Network,CNN)[5]进行线性调频(Linear Frequency Modulated,LFM)信号调频斜率参数的识别,其中LFM信号调频斜率估计过程中的特征提取和分类可在同一网络内完成,从而大大提高了识别效率[6]。同时,经CNN提取的数据深层信息也提高了后端分类器的识别率。
1 目标高速运动对ISAR成像的影响
线性调频信号是ISAR成像雷达中广泛采用的信号形式之一[7]。设发射线性调频信号为
(1)
式中:f0为起始频率;γ为调频斜率。发射脉冲信号经过目标反射回来被雷达接收的回波可以表示为
(2)
式中,τ=2R(t)/C,是回波与发射信号的时间差,R(t)为雷达到目标的距离,C为光速。
采用匹配滤波处理对线性调频信号进行脉冲压缩,对回波进行匹配滤波处理后得到
(3)
假设运动目标的径向速度为V,则在脉内的距离走动可表示为R(t)=R0+Vt,其中,R0为脉冲信号起始时刻目标到雷达的距离,将其代入式(3)相位展开为
(4)
式(4)给出了目标回波经过匹配滤波处理后的相位表达式。一般情况下,目标运动的速度不大,所以在短暂的脉冲持续时间内目标与雷达间的距离可认为近似不变,即R(t)≈R0,可得到相位近似为
(5)
脉冲信号经过匹配滤波处理后得到的是单频信号,因此直接进行傅里叶变换可实现距离压缩。但成像目标速度过快时,在短暂的脉冲持续时间内目标与雷达间的距离不可近似不变,因此回波的相位应该采用式(4)给出的精确相位来表示。从式(4)可以看出,在目标高速运动时,其目标回波经过匹配滤波处理后仍然是一个线性调频信号,如果直接对其进行傅里叶变换做径向距离压缩将会使距离像产生畸变。
2 Wigner-Ville分布生成时频图像
Wigner-Ville时频分析表达式为
(6)
将式(1)LFM信号代入Wigner-Ville分布的时频分析式(6)中,表达式为

(7)
不同调频斜率的时频图如图1所示。
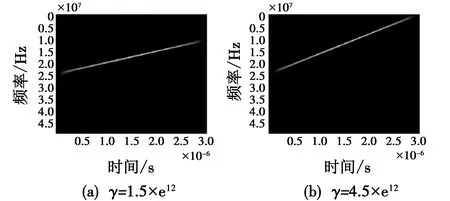
图1 不同调频斜率的时频图
从图1中可以看出,线性调频信号通过Wigner-Ville分布后在时频面上呈现出沿直线f=f0+γt分布的冲激直线谱,直线的截距和斜率分别为LFM信号的起始频率和调频斜率。
将式(3)的高速目标回波信号代入Wigner-Ville分布式(7)可得
(8)
由以上分析可以看出,线性调频信号中不同的调频斜率在Wigner-Ville分布呈现不同斜率的倾斜直线。本文利用不同调频斜率的时频图均有细微的斜率差别,采用深度学习的方法,首先对不同调频斜率下的LFM信号通过Wigner-Ville分布生成时频图,对这些不同速度下调频斜率的时频图构建数据集,其标签即为对应的速度,对数据集进行训练;随后对需要参数估计的LFM信号进行Wigner-Ville分布生成时频图,将图片输入到卷积神经网络,输出图片识别出速度,从而实现LFM信号参数估计。
3 卷积神经网络进行调频斜率识别
卷积神经网络可以直接对二维图像进行处理,通过对多个卷积层的拟合,拟合成复杂函数,每个卷积层的局部特征通过权重的共享,作为下一个卷积层的特征,这可减少网络参数的个数,并且使模型过拟合的问题也得到有效缓解,因此在图像处理领域得到广泛的应用。
1) 卷积操作进行特征提取,算式为
(9)

2) Softmax进行分类识别[8-9],算式为
(10)
在分类识别中,输出端的第m个时频图样本用(x(1),y(1)),(x(2),y(2)),…,(x(i),y(i)),…,(x(m),y(m))表示,第i幅二维时频图像通过卷积等一系列操作处理后,将其全连接层输入到Softmax的特征向量表示为x(i),真实的二维时频图像类别表示为y(i),需要被识别的二维时频图像类别数表示为k,模型参数表示为θ,式(10)表示第i幅二维时频图像识别为第j类二维时频图像的概率大小。
Softmax的输出端有k个神经元,即代表k类,k个神经元针对每幅二维时频图像都对应一个期望值,当正确输出时神经元值为1,其余则为0。当Softmax判断输出的值同神经元上的期望值有偏差时,则利用这个偏差对模型参数进行迭代优化处理,最终得到二维时频图像正确的识别,损失函数表达式为
(11)
由于本文使用的Wigner-Ville时频图较为简单,所以本文采用的是自己搭建的网络,由2个卷积、2个池化和3个展平构成,如图2所示。
利用卷积层进行时频图像特征提取,全连接层对提取的特征进行整合,输出层根据特征分类识别。卷积块输出可视化实验如图3所示。由图3可知,本文网络的确能准确提取雷达信号时频图像的斜率特征作为分类依据。
进行以上分析后,可建立如图4所示的基于深度学习的线性调频信号参数估计并补偿的流程图。
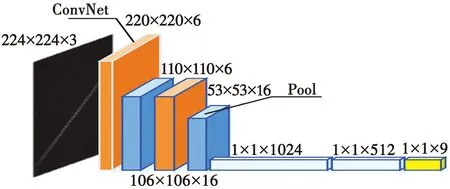
图2 网络结构Fig.2 Network structure
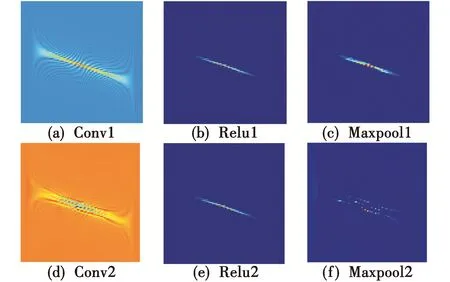
图3 卷积块输出可视化Fig.3 Visualization of convolution block output
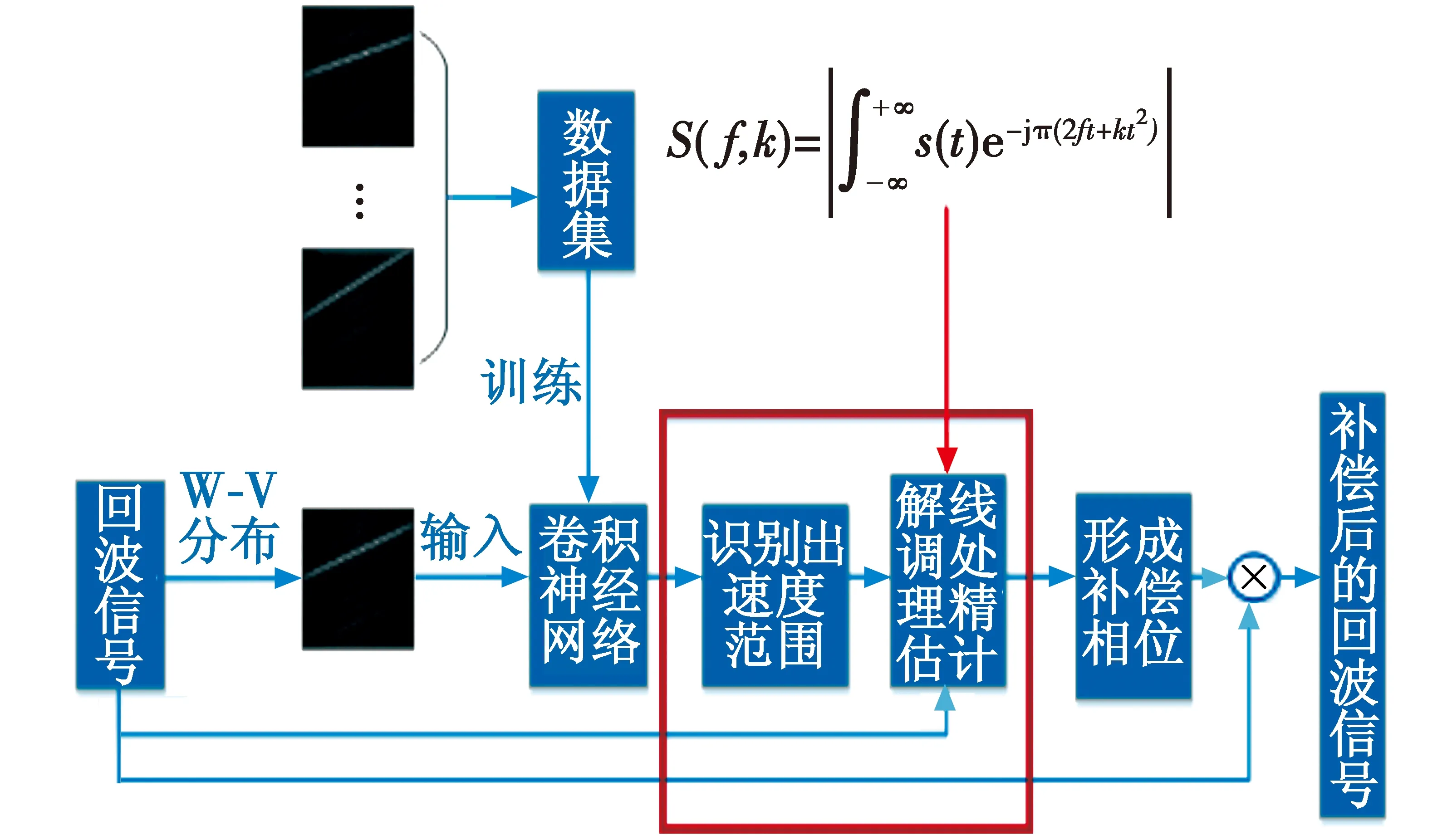
图4 信号参数估计及速度补偿流程图Fig.4 Flow chart of signal parameter estimation and velocity compensation
首先对不同调频斜率下的线性调频信号通过Wigner-Ville分布生成时频图,对这些不同调频斜率下的时频图构建数据集,其标签即对应的速度,对数据集进行训练。随后对运动目标的回波进行Wigner-Ville分布生成时频图,将图片输入到卷积神经网络,输出图片识别出速度并形成补偿相位,最后对运动目标的回波进行补偿,形成补偿后的回波信号。
4 仿真实验
实验仿真的雷达信号是系统带宽60 MHz、脉冲宽度25.6×10-4s、脉冲重复频率为1200 Hz的线性调频信号。可以计算出距离分辨单元为2.5 m,当脉内速度达到1000 m/s时,就会产生脉内的距离走动,从而导致距离像模糊。目标散射点组成如图5所示。对上述参数条件下目标运动速度为2000 m/s的回波数据直接进行R-D算法运算得到的ISAR像,如图6所示。
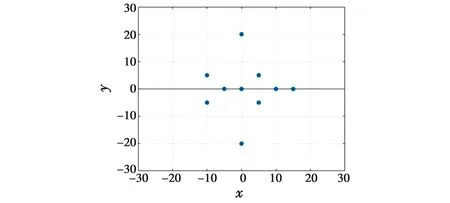
图5 目标散射点组成Fig.5 Composition of target scattering point
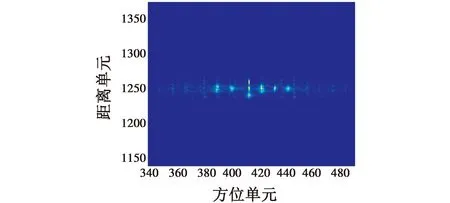
图6 高速运动目标的ISAR成像Fig.6 ISAR imaging of target moving at high speed
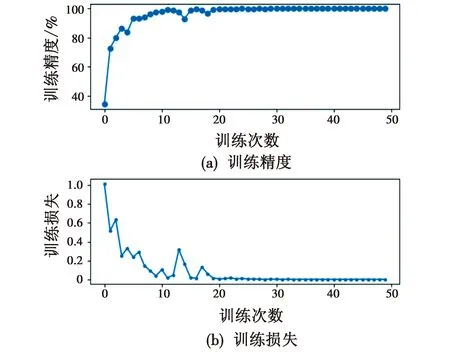
图7 50次训练下的精度与损失图
随后生成测试集1,分别重新生成上述9类速度的目标回波信号时频图各100张图片进行测试,测试结果如表1所示。
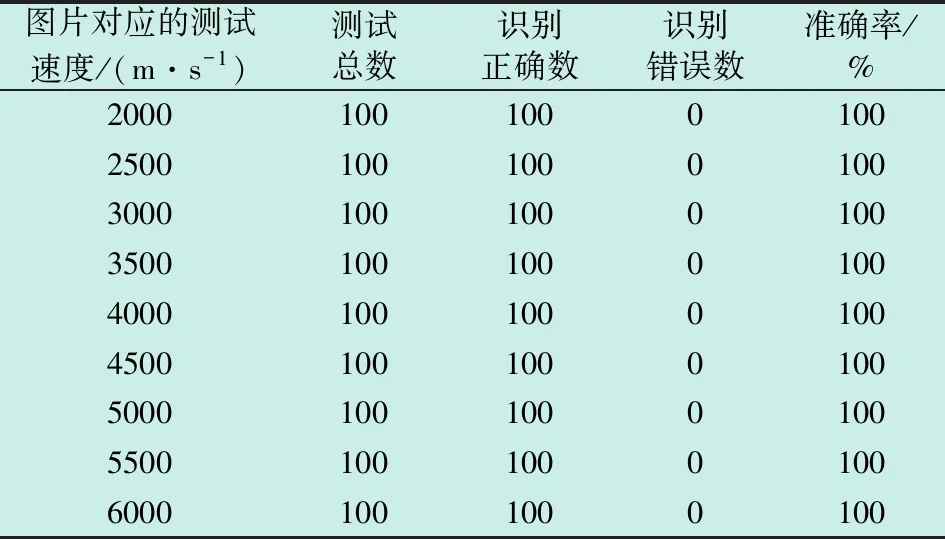
表1 测试集1的测试结果Table 1 Test results under Test set 1
测试集1里9类速度的识别图如图8所示。
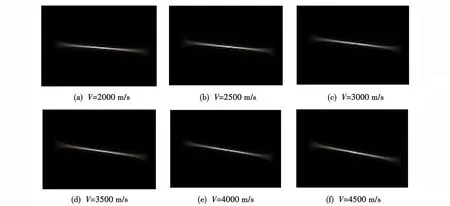

图8 9类速度的识别图Fig.8 Identification diagram of 9 kinds of velocity
从表1与图8可以看出,对数据集已有9类速度的时频图都能够准确地识别,并且识别率非常高,同时可以看出该网络的确能准确提取雷达信号时频图像的斜率特征作为分类依据。
由于目标运动的速度具有随机性,目标运动速度不可能准确落在所构建数据集的9类速度上,因此构建测试集2,分别生成速度为2200 m/s,2300 m/s,2700 m/s,2800 m/s,3200 m/s,3300 m/s,3700 m/s,3800 m/s,4200 m/s,4300 m/s,4700 m/s,4800 m/s,5200 m/s,5300 m/s,5700 m/s,5800 m/s各100张目标回波时频图进行测试,测试结果如表2所示。
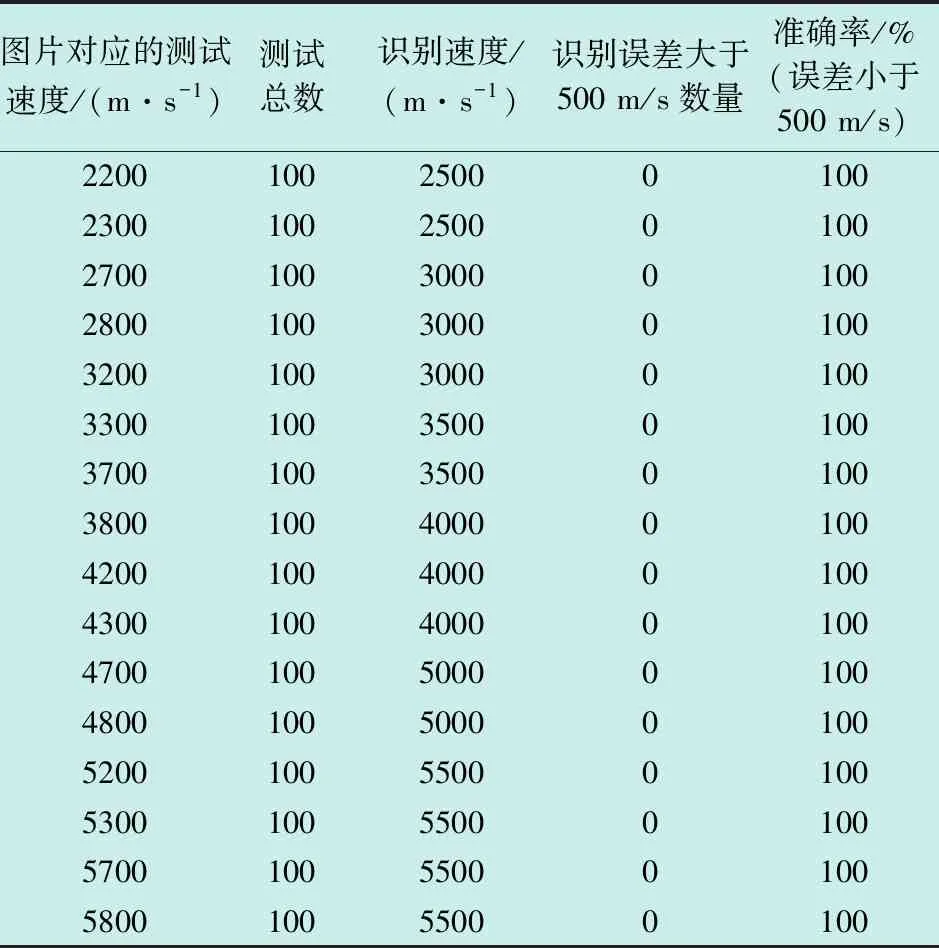
表2 测试集2的测试结果Table 2 Test results under Test set 2
测试集2里16类速度的识别图如图9所示。

(12)
下面对点目标进行仿真实验,设置点目标如图10(a)所示,点目标速度为2000 m/s,对点目标直接进行R-D算法成像处理,成像的结果如图10所示。
采用本文方法进行相位补偿后成像的结果如图11所示,点目标的峰值旁瓣比如表3所示。
从表3中可以看出,采用本文的相位补偿方法在距离向上峰值旁瓣比提高了3.39 dB。对比图10(d)和图11(d)可以看出,相位补偿前后方位向-3 dB宽度变窄,方位向分辨率有所提高。
对相同参数下,目标结构如图5所示,运动速度为2000 m/s的回波数据直接进行R-D算法运算得到ISAR像(图12(a))和回波相位补偿后R-D算法得到ISAR像(图12(b))。

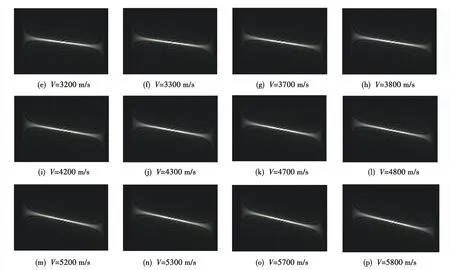
图9 16类速度的识别图Fig.9 Identification diagram of 16 kinds of velocity

图10 未相位补偿的点目标成像结果Fig.10 Imaging result of point target without phase compensation
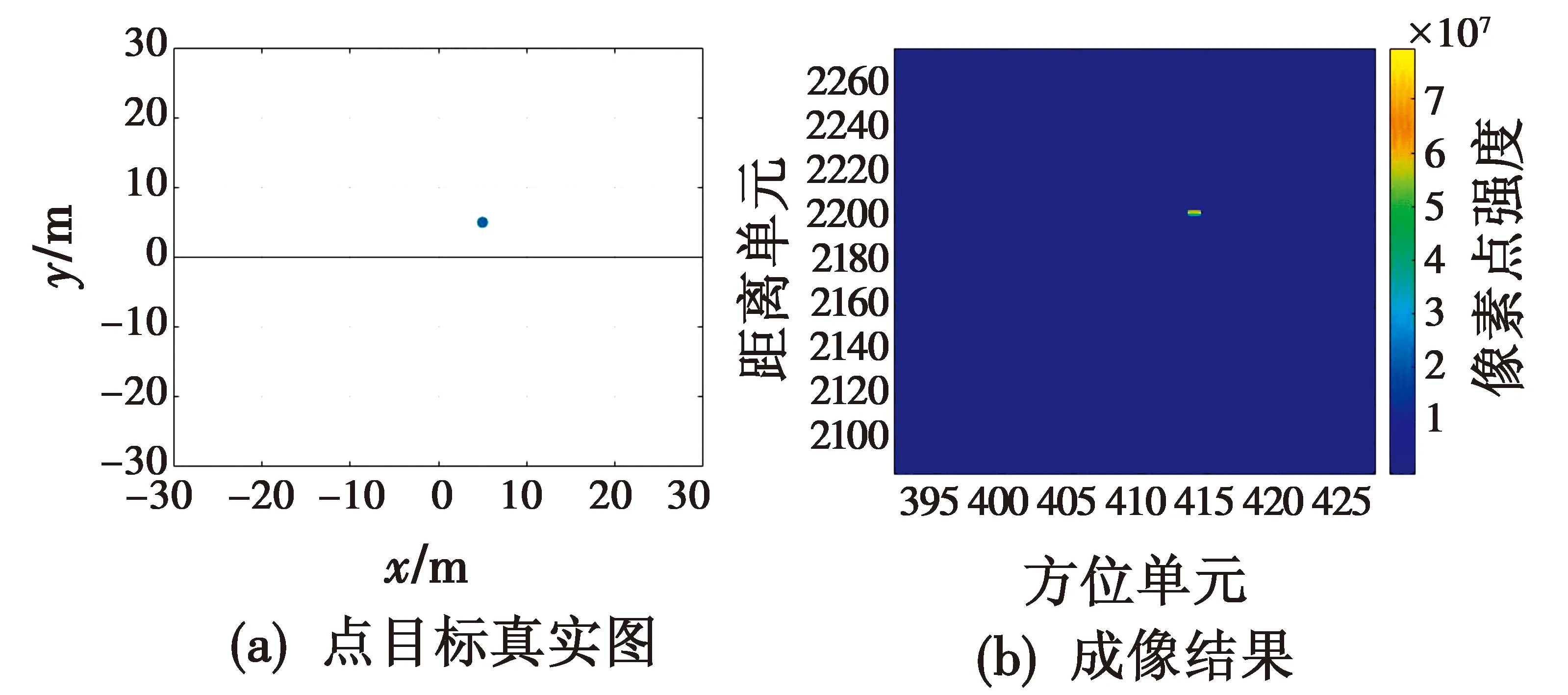
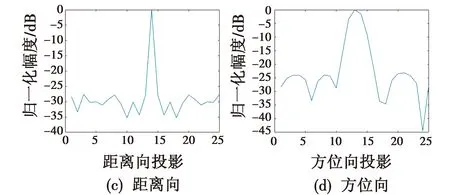
图11 相位补偿后的点目标成像结果Fig.11 Imaging result of point target after phase compensation
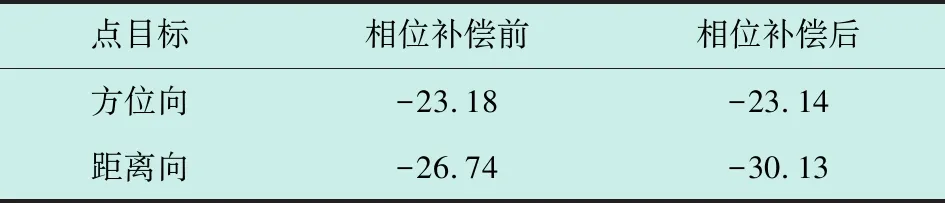
表3 相位补偿前后点目标的峰值旁瓣比
通过图12(a)可看出,未采取补偿的ISAR像的成像效果不好,距离向和方位向都出现散焦现象,由图12(b)可看出,补偿后的ISAR像的距离向和方位向散焦现象得以改善,方位向分辨率提高,可以清晰地看出各个散射点,验证了本文方法的有效性。
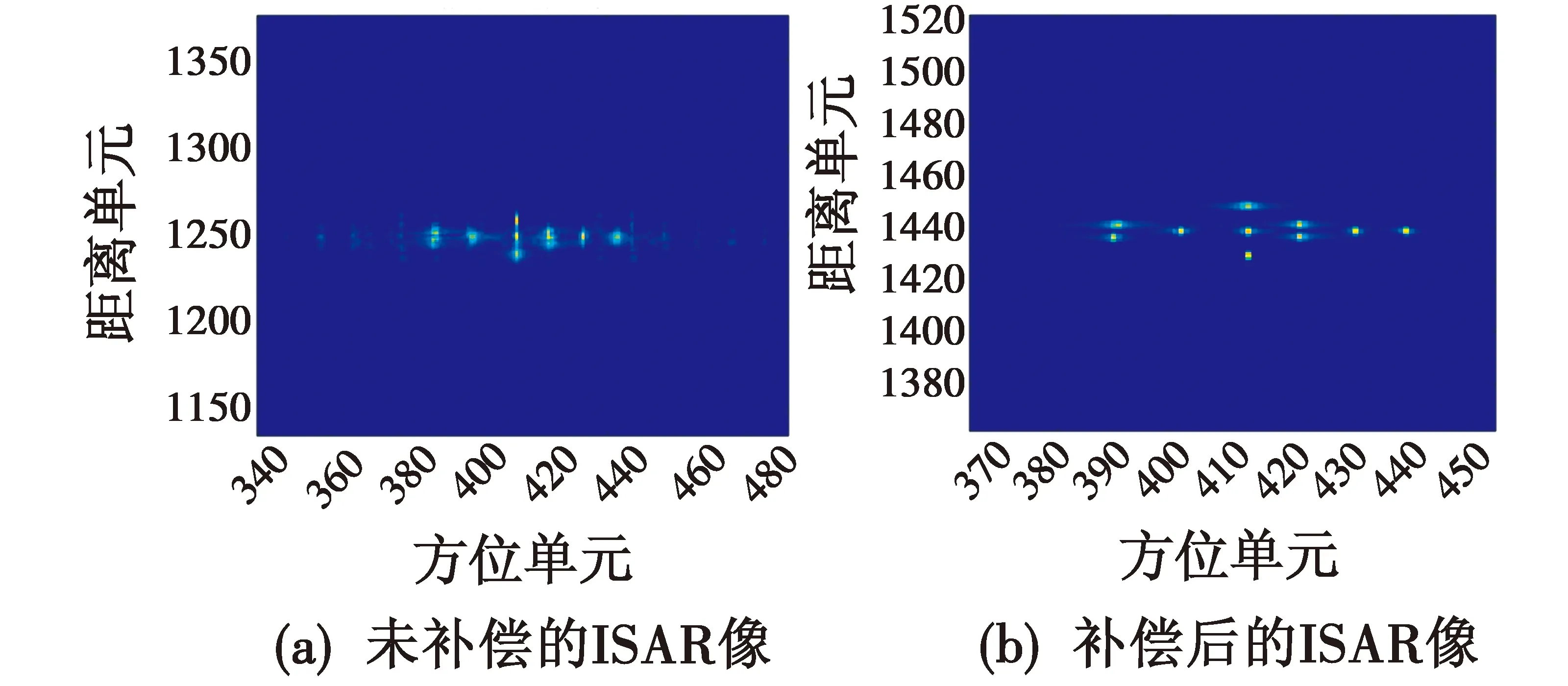
图12 补偿前后的ISAR像Fig.12 ISAR image before and after compensation
5 结语
本文分析了目标高速运动对ISAR成像的影响,讨论了高速引起脉内距离走动对成像的影响及其解决办法。针对传统的信号参数估计方法构建补偿信号误差大的问题,本文提出了基于卷积神经网络粗估计调频斜率的方法,先识别出回波的时频图所对应速度的区间,再用解线调处理对线性调频信号精估计求出估计速度,最后构建补偿信号并对回波信号进行补偿,处理后得到清晰的ISAR像。仿真结果表明了本文方法的有效性。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:28
能源工程(2021年5期)2021-11-20 05:50:42
统计与决策(2017年2期)2017-03-20 15:25:22
数学物理学报(2016年5期)2016-08-24 07:38:48
系统工程与电子技术(2016年2期)2016-04-16 05:17:08
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
舰船科学技术(2015年8期)2015-02-27 15:38:48
海军航空大学学报(2015年4期)2015-02-27 13:45:51
电测与仪表(2014年17期)2014-04-04 11:56:48
