小麦小区条播机电控排种系统设计与试验
2023-03-07 07:20俞传阳陈黎卿
农业机械学报 2023年1期
俞传阳 陈 状 陈黎卿
(1.安徽农业大学工学院, 合肥 230036; 2.安徽建筑大学机械与电气工程学院, 合肥 230601)
0 引言
小麦作为我国种植面积最大的作物,其品种选育是关系品质的重要因素。小麦小区播种是品种选育的一个重要环节,田间育种试验是进行品种改良和繁育良种的小面积试验,实现育种试验机械化能够提高育种试验准确性、提高工作效率、减轻劳动强度[1]。小区播种机作为田间育种试验的专用播种机械,能够将定量的种子按照农艺要求播入一定范围的小区内[2-4]。小区条播机作为小区播种机械主要机型之一,通过人工供种、锥体充种、格盘运种、排种口排种、离心分种器分种等完成一个小区的播种[5]。离心式排种系统工作性能直接影响到小区播种机播种性能。为了提高排种性能,国内外者进行了大量研究[6-11],WAEL[12]以小麦、扁豆和亚麻为试验对象,研究了3种作物分别在对称式离心分种器和对称分隔式离心分种器下的播种效果,结果表明对称式离心分种器对于3种作物的分种效果均高于对称分隔式;程修沛等[13]以离心分种器的转动速度、离心分种器的分种面夹角和离心分种器分种距离为试验因素进行分析,确定了各因素对分种均匀性的影响规律;龚丽农等[14]为了提高小区播种机的工作精度和工作效率设计了小区播种机电控系统,并通过试验分析了播种不同种子时分配器的最佳转速;程修沛等[15]为了提高小区播种机的自动化水平,基于STM32设计了小区播种机排种控制系统,采用Android 终端进行人机交互,实现了小区排种作业的精准控制。以上成果为小区播种机性能提升奠定了一定基础,然而,现有小麦小区条播机电控排种系统结构不合理、车速与锥体格盘速度匹配不理想等对小麦播种均匀性一致性影响研究尚不足,制约了小麦小区条播机的进一步推广应用。
本文设计基于ARM的小麦小区播种机电控排种系统,采用串口屏作为人机交互,设计北斗导航设备定位信息解析、步进电机驱动锥体格盘、直流无刷电机驱动分种器的控制接口,形成提高小麦小区播种机排种性能的成套电控系统。
1 小区播种机电控排种系统工作原理
小麦小区条播机主要由底盘、发动机、开沟器、离心分种装置、锥体格盘、格盘电机、减速器、控制箱、人机交互屏、北斗差分定位系统等组成,整机构成如图1所示。

图1 小区播种机整机效果图Fig.1 Render of whole plot planter1.发动机 2.人机交互屏 3.控制箱 4.北斗天线 5.锥体格盘 6.格盘电机及减速器 7.离心分种装置 8.开沟器
作业时,控制箱采集北斗差分定位信息,计算锥体格盘匹配转速,控制格盘电机和分种电机运转,小麦种子经种管落入开沟并被覆土。
小麦小区条播机控制系统如图2所示。整个控制系统主要分为信号采集系统、人机交互系统、执行机构3部分。信号采集系统主要包括北斗差分定位系统和STM32F4串口通信模块,其中北斗差分定位系统由移动站和基站两部分组成,工作时,基站置于空旷无遮挡高处,移动站置于播种机中间位置随播种机运动,移动站将报文数据发送到控制器,解析得到小区播种机速度信息;人机交互系统主要设置小区长度和将离心分种器转速发送到控制器,同时实时显示小区播种机的作业信息;执行机构主要包括步进电机和永磁无刷直流电机(以下简称BLDC),步进电机通过小区播种机速度信息控制锥体格盘转动,BLDC通过控制器指令保持一定的转速控制离心分种器转动。
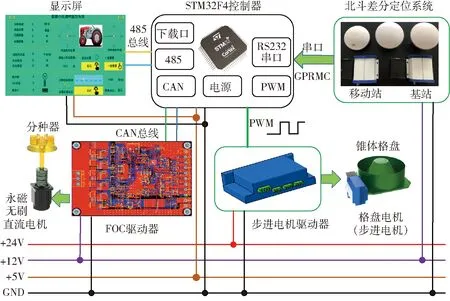
图2 小区播种机控制系统框图Fig.2 Structure diagram of control system of plot planter
2 离心分种装置设计
2.1 工作原理
排种装置整体结构如图3a所示,主要由锥体格盘、格盘电机、减速器、链传动和离心分种装置组成。其中,离心分种装置由落种漏斗、离心分种器、八行分种管、联轴器、BLDC组成,BLDC轴与联轴器相连,联轴器另一端与离心分种器轴相连,由BLDC控制离心分种器的转速。工作时,预先设定BLDC转速,当锥体格盘转动时,种子从锥体格盘落种口落下,通过落种漏斗落到离心分种器表面,离心分种器高速旋转,种子在离心力作用下均匀分配为8行。分配头与导种管相连,完成排种工作。

图3 排种装置结构示意图Fig.3 Diagrams of seed discharge device1.锥体格盘 2.格盘电机及减速器 3.链传动 4.离心分种装置 5.落料漏斗 6.分种器 7.分种管 8.联轴器 9.BLDC
2.2 结构设计
小麦从落种漏斗落到离心分种器上,到小麦被离心力甩出离心分种器,可能会出现两种运动情况:还未与离心分种器凸台碰撞就已经甩出离心分种器;与离心分种器凸台产生碰撞之后弹出离心分种器。假设小麦未与离心分种器凸台碰撞就已经甩出,则小麦受力分析如图4所示。
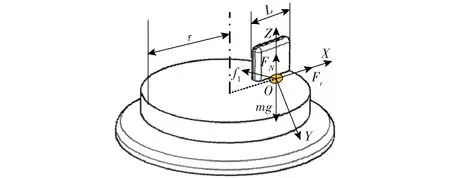
图4 小麦未碰撞时运动分析Fig.4 Motion analysis of wheat without collision
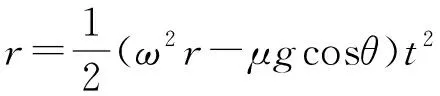
其中,小麦主要受力有离心力Fr(N)、离心分种器水平面支持力FN(N)、自身重力mg(N)、小麦滑动时水平面摩擦力f1(N)、凸台长度为L(m)。在离心力X方向上,受力方程为

(1)
式中m——小麦质量,kg
g——重力加速度,m/s2
v——离心分种器线速度,m/s
ω——角速度,rad/s
μ——离心分种器水平面摩擦因数
θ——小麦滑动时水平面摩擦力f1与X轴负方向夹角
r——离心分种器半径,m
(2)

(3)
经分析可得
(4)
离心分种器旋转一圈所需时间
(5)
式中n——离心分种器转速,r/min
(6)
联立可得
(7)
所以存在小麦未与离心分种器凸台碰撞就直接甩出离心分种器的情况。假设有k个凸台,那么当离心分种器旋转时,相邻的两个凸台经过同一点的时间间隔为
(8)
而凸台长度L必须满足
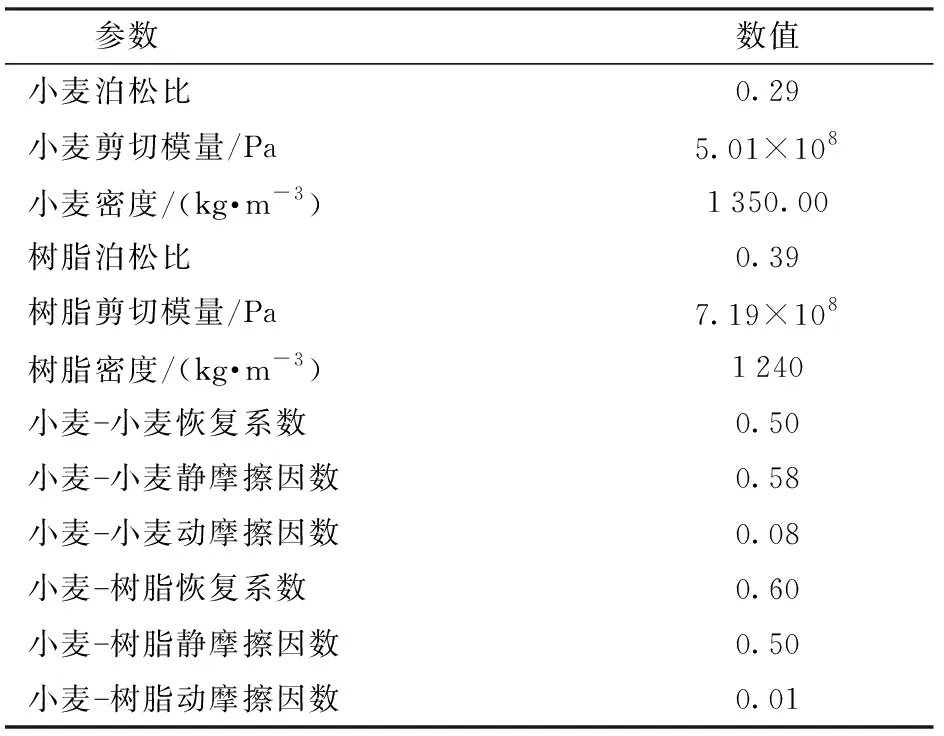
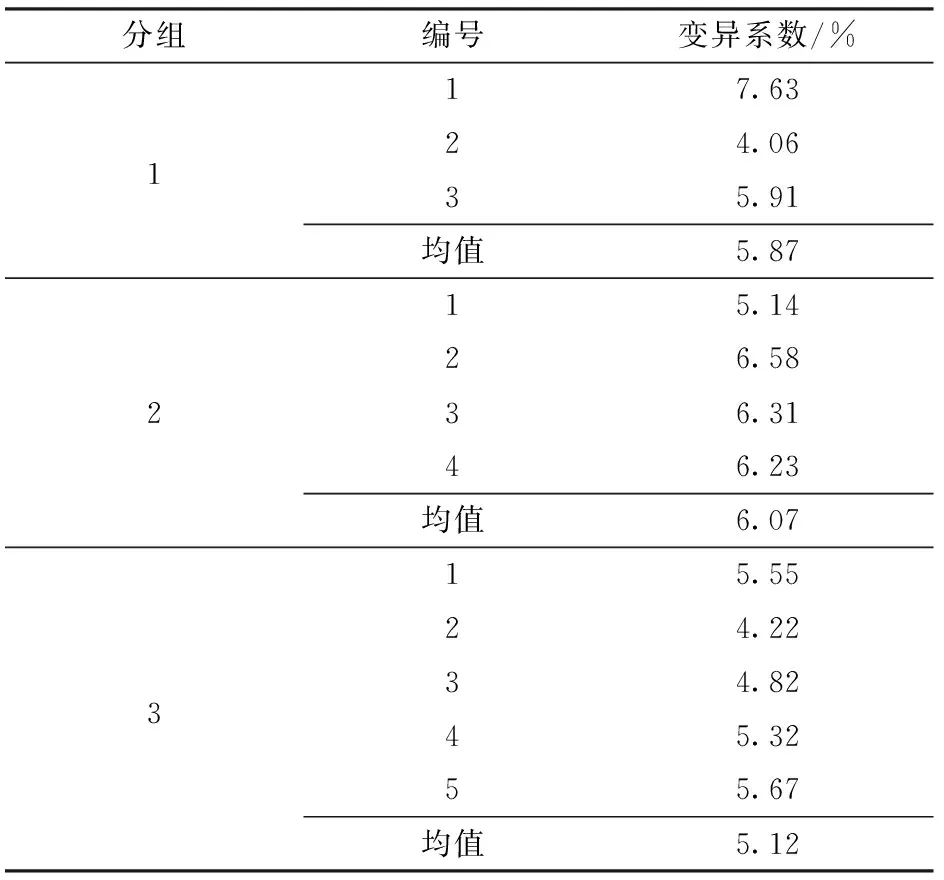
L (9) 因为小麦种子从离心分种器中心的正上方落下,如果凸台长度过大,小麦种子将会直接落到凸台上方,影响分种效果。在满足凸台长度L小于半径r的条件下,当离心分种器转速和凸台个数不变时,凸台长度越大,离心分种器凸台与小麦种子产生碰撞的几率就越大。 由此,得出离心分种器转速、凸台个数和凸台长度对分种效果存在一定影响,通过离散元进一步分析。 控制系统硬件主要由STM32F405RG最小核心模块、电源模块、按键模块、LED状态指示模块、串口屏模块、步进电机驱动模块、CAN总线模块和北斗差分定位系统串口通信模块等组成。控制器采集北斗差分定位系统输出的GPRMC报文进行解析,得到小区播种机的速度及位置信息,进而匹配锥体格盘转速。人机交互系统能够完成小区播种实时运行状态参数显示,如当前小区播种机前进速度、锥体格盘转过角度、小区播种机前进距离等参数,并且可以在小区播种机作业前设置小区长度、离心分种器的转速,向控制器发送开始指令。 锥体格盘驱动系统硬件主要由锥体格盘部件、步进电机、步进电机驱动器以及控制器接口电路等组成。选用86HBM80H型闭环步进电机,支持DC/AC 24~75V,配有广州雷赛公司的HBS86H数字式混合伺服驱动器,细分选项达16种组合,最大为51 200 p/r。 控制器电平为3.3 V,步进电机驱动器标准控制信号为5~24 V,控制器PWM脉冲控制引脚(PA5)与驱动器间增设高速电平转换模块TXS0108E,形成5 V可调频率PWM驱动信号。由电机频率转速关系可得 (10) 式中n0——锥体格盘转速,r/min f——PWM频率,Hz N——步进电机驱动器一圈脉冲数 i——与格盘电机连接的减速器减速比 由STM32F405RG中PWM频率设置关系可得 (11) 式中NT——定时器时钟频率,Hz Npsc——预分频系数 Narr——寄存器自动重装载值 可得锥体格盘转速和PWM控制频率关系为 (12) 试验中,采用STM32F405RG的TIM8定时器,时钟源NT为168 MHz,自动重装载值Narr为336,与格盘电机连接的减速器速比i为40,步进电机驱动器一圈脉冲数N设置为10 000。联立式(10)~(12)可得 (13) STM32F405RG芯片定时器时钟经8分频后,预分频系数Npsc取值范围为0~65 535,则锥体格盘转速n0取值范围为0~75 r/min。经上述理论分析可得出目标转速n0和定时器预分频系数Npsc关系,但不能直接用于被控对象,其回归特性多采用实测方法得到。以0.50 r/min为等间距、以0.50 r/min为起始目标转速进行12组试验,通过编码器测量锥体格盘实际转速,编码器安装图如图5所示。 图5 编码器安装图Fig.5 Encoder installation drawing 考虑单片机实际工作性能,目标转速和实际转速关系不宜采用高阶多项式拟合,因此本文采用一阶拟合曲线得到目标转速n0和实际转速n的函数关系 n=1.79n0-0.36 (14) 由小区条播机的作业要求可知,小区条播机在规定长度区域行走所需时间应与锥体格盘转动一圈时间一致,即满足 (15) 式中vt——小区条播机行走速度,m/s vd——北斗移动站输出含速度信息的GPRMC报文解析以节为单位的小区条播机行走速度,kn 本文采用北斗星通高高精度差分定位技术模块UB480和UB482,分别作为基站和移动站,可以实现相对精度达2 cm左右的定位准度,通过实测5 m和10 m,分别试验3组,平均解析值为498.63 cm和997.98 cm,误差都在2 cm左右,定位精度满足系统要求。由于北斗移动站存在静态下定位漂移的现象,采用Mean-Shift聚类算法分析静态下340个速度样本数据,得到聚类中心数为22个,速度漂移范围在0.006~0.28 km/h之间,对聚类中心的速度取均值0.06 km/h,因此在实际控制中需减去静态速度误差均值,如图6所示。 图6 移动站漂移数据Fig.6 Mobile station drift data 得出目标预分频系数Npsc和小区条播机行走速度之间的函数关系 (16) BLDC采用57BL75S10-230TF9型永磁无刷直流电机,DC 12 V供电,额定功率100 W;匹配自制矢量控制器,实现500~2 000 r/min无级调速,与控制器通过CAN总线通信,波特率为500 kbit/s。CAN通信协议如表1所示。 表1 CAN通信协议Tab.1 Statistics of CAN communication protocol 离心分种转速调控对小麦播种性能有一定影响,文献[15]采用占空比控制BLDC驱动器,得出占空比和分种转速拟合函数关系。本文在此基础上,采用带有矢量控制算法(简称“FOC”)的BLDC驱动器对分种目标转速分别为1 000、1 200 r/min进行测试。如图7所示,采用FOC驱动器控制电机转速波动均小于4 r/min,以此保证分种转速稳定性。 图7 电机转速响应曲线Fig.7 Motor speed response curve 控制系统软件以MDK5作为开发平台,采用C语言进行编程,控制流程如图8所示。 图8 控制系统流程图Fig.8 Flow chart of control system 控制系统软件核心在于解析北斗移动站报文对锥体格盘转角实时控制。移动站输出报文带有经纬度和速度信息的字符串,遵循NMEA-0183协议标准。北斗移动站每秒输出近1 KB ASCⅡ字符数据到控制器串口,采用DMA方式绕过CPU而将数据直接由串口寄存器搬运到内存数组,降低了CPU占有率;利用环形数组对北斗数据进行缓存,并周期性调用解析函数,保证了数据不丢帧;对环形缓冲区数据采用有限状态机法解析出一帧完整GPRMC数据帧,基于NMEA-0183的C开源库实现解析GPRMC帧,得到时速信息。 通过CATIA软件建立离心分种机构三维模型,将三维模型保存为igs格式,三维模型导入EDEM离散元仿真软件中,在落种漏斗正上方建立颗粒工厂,模拟锥体格盘机构的落种过程。 试验选用小麦品种为济麦22,在小麦种子中随机选取1 000粒测量其质量,再随机选取100粒小麦种子测量其长、宽、高,分别测试3组,结果如表2所示。 表2 小麦种子千粒质量和外形尺寸统计Tab.2 Wheat seed 1 000 grain weight and size statistics 根据3组平均值对济麦22种子进行CATIA三维建模,保存为igs格式,将小麦颗粒模型导入EDEM离散元仿真软件中,进行颗粒填充,填充后的小麦颗粒模型如图9所示。 图9 小麦颗粒离散元模型Fig.9 Discrete element model of wheat grain 离心分种器的材质为树脂,相关参数如表3所示[16-19]。 表3 仿真参数Tab.3 Simulation parameters 选取凸台数、离心分种器转速、凸台长度为试验因素,采用三因素五水平二次正交旋转中心组合试验方法,以变异系数为评价指标。参考小麦条播机排量[20],拟定小麦播种量为150 kg/hm2,设计播种量为2 000粒,生成速度为200粒/s,进行正交试验。根据前期单因素试验的结果,选择离心分种器转速范围为1 000~1 400 r/min,凸台长度范围为10~22 mm,凸台数范围为2~10个。试验因素编码如表4所示。 表4 正交试验因素编码Tab.4 Orthogonal test factors and codes 因为凸台数为整数,且为了方便进行试验,对各因素进行取整。当仿真模拟播种过程完成后,进入Analyst Tree界面,为统计经过各个分配头的小麦籽粒数量,在八行分配头的各个分配口处生成50 mm×50 mm×50 mm的栅格组,如图10所示,以此来统计各个分配头排出的小麦籽粒数量。 图10 小麦籽粒统计仿真Fig.10 Statistical simulation of wheat grain1.小麦籽粒 2.离心分种器 3.栅格组 每一组仿真试验结束后,统计各个分配头的小麦种子数,计算变异系数,结果如表5所示。 表5 正交试验结果Tab.5 Statistics of coefficient of variation of orthogonal test 方差分析如表6所示,变异系数回归模型F高度显著(P<0.01),检验水平P=0.285 9>0.05,回归方程不失拟。由表6可得,各试验因素对变异系数的影响从大到小分别为离心分种器转速、凸台数、凸台长度。变异系数Y1回归响应面方程为 表6 变异系数方差分析Tab.6 Analysis of variance coefficient of variation Y1=3.64-0.92A-0.90B-0.61C-1.55AB+ (17) 式中A、B、C——凸台数、离心分种器转速、凸台长度编码值 根据分析结果,利用Design-Expert 8.0软件绘制各因素交互效应响应曲面图,图11a为凸台数与离心分种器转速对变异系数影响的响应曲面,当凸台数不变时,随着离心分种器转速的增大,变异系数先减小后增大,当离心分种器转速不变时,随着凸台数的增加,变异系数先减小后增大;图11b为凸台数和凸台长度对变异系数影响的响应曲面,当凸台数不变时,随着凸台长度的增加,变异系数先减小后增加,当凸台长度不变时,随着凸台数的增加,变异系数先减小后增加;图11c为离心分种器转速与凸台长度对变异系数影响的响应曲面,当凸台长度不变时,当离心分种器转速逐渐增大时,变异系数先减小后增大,当离心分种器转速不变时,随着凸台长度的不断增大,变异系数先减小后增大。综合分析可得,较优的参数组合为:凸台数为6、离心分种器转速为1 200 r/min、凸台长度为16 mm。 图11 各因素交互作用对变异系数影响的响应曲面Fig.11 Influence of interaction of various factors on response surface of coefficient of variation 台架试验在安徽农业大学智能农机装备工程实验室进行,台架选用JPS-12型排种器性能试验台,台架试验选用的小麦品种为济麦22,为保持和仿真一致,将锥体格盘转速设置为6 r/min,每次试验加入2 000粒小麦种子,通过存种袋收集各个分配头排出的小麦数量。台架试验共进行9组,试验后计算变异系数和种子破碎率。 台架试验结果如表7所示。通过测得的数据计算得:台架试验变异系数平均值为4.02%,台架试验结果与仿真试验结果基本一致。小麦种子破损率的平均值为0.22%,符合国家标准[20]要求。 表7 台架试验结果Tab.7 Bench test results % 为避免播种混种,设计了小区条播机清种功能,通过点击人机交互系统一键重置按钮,锥体格盘便会自转两圈实现清种。 5.2.1试验方案设计 锥体格盘共有45个小槽格,分别编号1~45,每次随机选取5个槽格,每个槽格加入10粒小麦种子,如图12所示,设置锥体格盘以转速6 r/min自转2圈,记录槽格内小麦种子数量,如图12所示。 图12 自净试验Fig.12 Self-purification test 5.2.2试验结果与分析 测得清种试验数据如表8所示,由数据可得,锥体格盘自转2圈可以将锥体格盘中剩余的小麦种子全部排出,不会造成和下一小区种子混种。 表8 清种试验结果Tab.8 Seed clearing test data 5.3.1试验方案 田间试验在安徽农业大学农萃园试验基地进行,田间试验现场如图13所示,试验样机如图13a所示。田间试验主要测量小区播种机各行总排量一致性。试验共进行3组,第1组播种小区长度为3 m,第2组播种小区长度为4 m,第3组播种小区长度为5 m。 图13 田间试验现场Fig.13 Diagrams of field test site 以3 m小区长度为例,各行排量一致性变异系数测量方法:以1 m等长连续取3段(1#~3#),分别统计各段玉米种子数量,同样方式再统计2~8行小麦种子数量;均匀性测量方法:以0.5 m等长连续取6段(A区~F区),分别统计各段玉米种子数量,采样示意如图13b所示。 5.3.2试验结果与分析 试验测得各行排量一致性变异系数如表9所示。由表9可得,各行排量一致性变异系数第1组均值为5.87%、第2组均值为6.07%、第3组均值为5.12%,均值为5.69%;播种均匀性变异系数均值第1组为20.10%、第2组为20.89%、第3组为21.32%,均值为20.77%。因田间作业会受到播种机振动、地表不平等因素的影响,变异系数相对仿真试验和台架试验会有所增加。 表9 各行排量一致性变异系数Tab.9 Coefficient of variation of consistency of seed metering quantity in each row (1)针对小麦小区条播机,设计了一种电控排种系统,建立锥体格盘转速控制模型,该系统通过北斗导航设备确定播种机行驶状态参数,完成对锥体格盘和离心分种装置转速匹配控制,离心分种装置采用自制电机矢量驱动器保证了分种转速的稳定性,设计人机交互系统,完成对作业参数的设定和作业信息的实时反馈,实现了一键清种功能。 (2)通过排种系统性能仿真,确定了各因素对分种均匀性的影响主次顺序为离心分种器转速、凸台数、凸台长度,并得到最优参数组合为凸台长度16 mm、凸台6个、离心分种器转速1 200 r/min,通过台架试验和田间试验表明,本文设计的电控排种系统排量一致性变异系数为5.69%,均匀性变异系数为20.77%,满足作业要求。3 电控排种驱动控制系统设计
3.1 控制器
3.2 锥体格盘与离心分种控制系统设计




3.3 软件设计

4 排种系统性能仿真
4.1 仿真模型建立


4.2 试验方案设计


4.3 仿真结果分析


0.63AC-0.37BC+3.13A2+1.94B2+0.97C2
5 性能试验
5.1 分种台架试验

5.2 清种试验


5.3 田间试验

6 结论
猜你喜欢
新农民(2021年13期)2021-09-16
中华养生保健(2020年10期)2021-01-18
当代水产(2019年11期)2019-12-23
今日农业(2019年14期)2019-09-18
参花·青春文学(2019年2期)2019-09-10
农业知识(2018年33期)2018-09-26
建筑热能通风空调(2018年5期)2018-07-09
现代制造技术与装备(2018年4期)2018-03-30
西藏科技(2016年10期)2016-09-26
祝您健康(1983年5期)1983-12-30