道路清洁垃圾智能分类处理车的设计与研究
2023-03-06 09:49曹又天江秋仪翟伟良陈智豪姜卫燃
智能城市 2023年12期
曹又天 江秋仪 翟伟良 陈智豪 姜卫燃
(广州城市理工学院汽车与交通工程学院,广东 广州 510000)
灵动核心统计数据显示,2019年北京城市生活垃圾生产量约为960 万t,占全国生活垃圾总产生量2.80%[1]。大量的垃圾对环境造成了巨大危害,可循环利用资源和不可回收资源一并处理回收的方案不合理[2]。智能分类处理小车旨在帮助人们更好地完成垃圾分类任务,优化社会居住环境。智能分类处理小车可以在电量富余的工作条件下对规划路线进行路面清扫和洒水,代替地面清扫车的任务,降低人力、物力成本;电量不足时,地面结构可以帮助其寻找距离最近的充电桩进行充电;地面站的高灵活部署特性使其可以安装在环卫工的房间内,也可以安装在当地的环卫部门等;使用招手即停功能可以回收路人手中的垃圾,小车舱内的旋转分类系统可以直接进行垃圾分类。针对市场上已有的智能分类垃圾桶,最大的技术挑战就是无法准确识别对黑色垃圾袋内的垃圾。智能分类处理小车借助先进的微波雷达技术和深度学习神经网络对袋内垃圾进行参数化分析,车舱内的机械臂手持刀轮解剖垃圾,开展精确、细致、有效、高效分类。
1 小车总体架构方案设计
1.1 外观结构设计
采用Ctita软件进行智能分类处理小车建模设计。智能分类处理小车由清扫装置和垃圾分类装置两大核心部件组成。清扫装置和驱动装置由清扫刷头、喉管、扁吸嘴、扫尘刷、离心风机、红外测距装置、智能地盘组成,驱动小车进行路径规划行驶和完成清扫工作。垃圾分类装置由树莓派、Arduino、舵机、传感器元件组成实现对垃圾的回收和分类。
智能分类处理小车建模如图1所示。

图1 智能分类处理小车建模
1.2 系统硬件结构设计
1.2.1 红外传感器
超声波传感器通过发射超声波与障碍物发生反射,用时间差来计算小车与障碍物的实际距离。但超声波在空气中传播与障碍物发生反射现象时,超声波的传输过程会受到温度、湿度等因素的影响,因此造成反馈数据出现较大误差。红外传感器的测算原理与超声波传感器类似,但红外传感器发射的光子不会受到外界温度、湿度等因素的影响,通过测算能够得到相对精准的反馈数据。红外传感器作为感知元件具有更高的精准度和安全性。
1.2.2 电机
智能分类处理小车采用直流电机,该电机不存在机械接触,传动力是在气隙中产生,线性模组除了与直流电机导轨产生摩擦外,不会产生其他摩擦。从尺寸的角度考虑,直流电机结构简单,体积较小,更适合为智能分类处理小车等小型清扫车供电。从动力角度考虑,直流电机动力足够强大,可应对各种复杂路面。从维护成本角度考虑,直流电机的结构部件少,运动无机械接触,大幅度降低了零部件的磨损,机械的使用寿命更长。
1.2.3 垃圾分类硬件
智能分类处理小车的垃圾分类系统以树莓派为核心,收集摄像头的捕捉画面进行分析。树莓派与Arduino之间通过串口进行通信,树莓派将分析结果传输给Arduino,从而判断回收的垃圾类别,再将结果进行整合,实现最终的垃圾分类功能。Arduino控制器负责接收经过树莓派处理后的信息,输出信号给舵机,使其转动一定角度,不同的角度对应不同的垃圾桶,再通过信号的发送使舵机复位,最终实现垃圾分类的目标[3]。
2 清扫工作与路径规划实现
2.1 清扫工作
小车的地面清洁部分由清扫刷头、喉管、扁吸嘴、扫尘刷、离心风机组成。吸尘器的组成部分主要为起尘、吸尘、滤尘3个部分。多种清扫元器件的相互配合可以最大限度地保证小车对地面垃圾进行彻底清洁。小车的清扫模组为模组化设计,该模组拥有完整的清扫、吸尘、洒水等功能。模组前方安装静电滚子,滚子带电后,地面上的细小粉尘能够吸附到滚子上;滚子完成半个工作周期后,滚子的另一侧接触地面,此部分安装刮尘板,刮尘板与滚子携带不同种的电荷,滚子上吸附的粉尘颗粒重新吸附至刮板上;吸附至刮板上的粉尘颗粒被负压吸尘装置吸入,沿着管道进入收容仓。
针对体积较大的垃圾,静电吸附效果欠佳。对此,在底盘下方靠前的位置安装鸭嘴形吸嘴,吸嘴后方连接负压吸尘装置,负压电机启动后带动叶轮旋转产生强大吸力,进而形成负压。负压吸尘方法属于被动清洁方式,可以将体积较大的异物吸入收容仓。针对地面上顽固的异物很难通过直接吸附进行清扫,在智能分类处理小车底盘两侧空余位置安装4个钢丝滚刷,滚刷由电机加减速箱直接驱动。钢丝硬度较大,转速较快,刷洗地面的顽固污渍效果能够更突出。
小车采用缩进式清扫,清扫车的初始位置按照预定沿边阈值贴近城市道路一侧,第一次周期工作结束后,小车会返回到起始位置,按照设定阈值缩进后进行第二次清扫工作,以此类推进行作业,直至整条道路清扫工作全部完成[4]。相较其他方案,缩进式清扫方案不仅可以提高清扫车的清扫效率,还具有节能的优点,可以更好地提高小车的清扫效率和续航能力。
2.2 智能底盘
智能分类处理小车使用了自主研发的纯电平台,使用12寸锻造轮毂和单永磁电机中置的布局,采用可控的全时四驱系统。智能底盘由永磁同步电机、转向电机、转向连杆、转向架、转向球头、独立梁以及减震支臂组成。减速箱具有齿比固定、传动比适中、工作配合协调性好、额定效率高、输出扭矩大、噪声小、发热低等特点。
2.3 路径规划
为了更好地配合缩进式清扫方案,小车采用扩展型弧形的路线规划方案[5]。该方案能够获取目标物在断裂前的完整三维模型,对完整三维模型进行体素化,评估体素化后模型内部的体素安全值。选择体素化模型的一个点作为通道的入口点,入口点对称的位置作为通道的出口点,再选择一个点作为通道的通过点。在模型中生成一条经过入口点、出口点、通过点的等曲率曲线,判断曲线穿过的体素的安全值是否均满足预设阈值,满足则保留当前生成的曲线。重复上述步骤生成多条曲线,选择安全值最高的曲线作为弧形通道的中心线,生成相应的弧形通道[6]。
3 垃圾分类的实现
3.1 控制系统
智能分类处理小车的垃圾分类系统采用的主控器是树莓派4B开发板,基于Linux内核的单片微型计算机,集性能强、体积小、适用范围广等多个优点于一身。主板采用ARM的微型主板,支持SD卡和MicroSD卡的硬盘输入,设有4个USB接口和1个10/100以太网接口,支持HDMI高清视频输出。
3.2 舵机
垃圾存储箱使用的舵机接口规格为JP/Futaba通用,扭矩为1.3 N·m,工作电压范围3.0~7.5 V,运行速度为53~62 r/min,主要负责对拨板角度的控制。接到分类信号时,拨板会进行不同角度的旋转,不同的角度对应不同类别的垃圾存储箱,进行准确的垃圾分类。
3.3 图像识别系统
垃圾分类处理流程如图2所示。
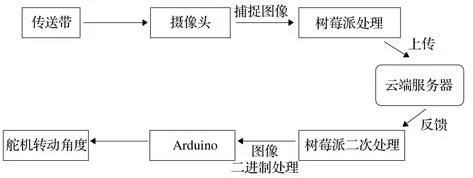
图2 垃圾分类处理流程
智能分类处理小车将垃圾清扫入小车内部后,摄像头会立刻对收集的垃圾进行图像识别,捕获的信息会传送至Arduino控制器。Arduino控制器与树莓派进行配合,将捕获的垃圾图片上传至云服务器,通过与云端存储的垃圾图片信息进行类比,选出与其相似度最高的垃圾类别,再将分析结果反馈到树莓派,树莓派经过运算分析将图片信息负反馈到Arduino控制器,与舵机进行配合,实现从收集到分类的过程[7]。
卷积神经网络多层化处理以层级网络形式展开,将输入层、卷积层、池化层和全连接层等各部件联系在一起,通过编码解码结构的自主深度学习对图像进行分析并创建记忆模型,以此完成信息提取和信息处理的任务。
3.4 数据收集与云端同步
树莓派通过摄像头捕获垃圾信息后,将图片实时上传至云端,云端图片实时更新。为了提高图片的识别率,在云端计算中心会对图片进行数千次运算,再将运算结果反馈给树莓派控制器,树莓派主板基于Linux系统开发,可进行复杂大量的数据处理,不断提高垃圾桶分类的精度。
4 结语
本文研究的路网规模仅为某镇的主城区路网,后续研究中可以将算法投入更大的路网规模中进行测试并改进。小车的全局路径规划问题中只考虑了行驶时间最短的目标,但实际问题中还需要考虑每派出一辆智能分类处理小车的成本费用、车辆充电产生的费用、设立充电桩的数量与成本之间的关系等,应进一步建立多目标模型进行研究。此外,还应当在全局路径规划中采用多种算法进行求解比较,寻找出更合适的求解算法。
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21
哈尔滨轴承(2021年4期)2021-03-08
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子制作(2019年11期)2019-07-04
文苑(2018年22期)2018-11-19
轴承(2018年10期)2018-07-25
电子制作(2018年8期)2018-06-26
电子制作(2017年17期)2017-12-18
中国酿造(2016年12期)2016-03-01