
基于双环单轴光纤陀螺仪的3位置寻北方法
2023-03-06 01:47杨志怀程文明陈国强
中国惯性技术学报 2023年2期
杨志怀,杨 光,叶 飞,程文明,陈国强,金 颖
(1.浙江航天润博测控技术有限公司,杭州 310002;2.浙江清华长三角研究院,杭州 310002)
光纤陀螺寻北仪是一种自主指示方位的高精度惯性仪表,它利用光纤陀螺仪测量地球自转角速度在载体不同轴向上的分量,来解算载体基准轴与真北方向的夹角,具有精度高、结构简单等特点。目前传统的光纤陀螺(基于单轴光纤陀螺仪)寻北解算方法有2位置寻北、4 位置寻北、多位置寻北和旋转调制等[1-5]。
通过提高光纤陀螺仪的检测精度可以提高光纤陀螺寻北仪的寻北精度。增加光纤陀螺光纤环的有效面积即增加光纤环的长度和直径,是提高光纤陀螺仪精度最直接和最有效的方法[6,7]。然而,受限于光纤陀螺寻北仪的设计尺寸要求,常规的单环单轴光纤陀螺仪的光纤环长度和直径在工程上很难大幅度增加。
光纤陀螺仪的理论静态检测精度与采样时间的平方根成正比,通过增加光纤陀螺寻北仪的单位置采样时间可以提高寻北精度[8]。然而,受限于光纤陀螺寻北仪的单次寻北时间要求和光纤陀螺仪的长时零位漂移性能限制,在工程应用中很难采用大幅度增加单次寻北时间来提高寻北精度。
单次寻北时间相同情况下,2 位置寻北方法可以实现较长的单位置采样时间,具有寻北精度高等优点。基于1 只单环单轴光纤陀螺仪的2 位置寻北方法中,寻北解算是基于余弦函数求解的。因此,存在两个符号相反的初始解算值,需要借助外部提供粗方位信息来进行象限判定,才能获得真实的初始北向夹角[4]。
基于1只单环单轴光纤陀螺仪的4位置寻北方案,无需外部提供粗方位信息,通过自身解算即可判定解算方位角的象限位置[9]。单次寻北时间相同情况下,相比2 位置寻北方案,存在单位置采样时间减少带来的寻北精度损失缺点[10]。
采用正交放置的2 个单环单轴光纤陀螺仪,可以同时测量载体两个正交轴上的地球自转角速率分量。因此,采用2 个单环单轴光纤陀螺仪的2 位置寻北方案无需外部提供粗方位信息即可解算真北方向。由于该方案提高了单位置采样时间,因此具有寻北时间短、精度高的优点。然而光纤陀螺仪价格高,占据了光纤陀螺寻北仪的主要成本。因此,采用2 个正交陀螺寻北方案的寻北时间和精度优势与其成本劣势是一对不可调和的矛盾。考虑到成本,当前市场上仍以单环单轴光纤陀螺寻北仪为主。
本文提出了一种双环单轴光纤陀螺仪,其敏感光纤环由2 个可独立安装且光路互易的光纤环段和一个光纤环并纤组成,从而保障整个敏感光纤环的光路互易性。基于双环单轴光纤陀螺仪,提出了一种3 位置寻北方法。将双环单轴光纤陀螺仪中的2 个独立光纤环段正交放置于寻北仪载体上,可以同时测量地球自转角速度在两个正交轴向上的投影分量。相比于采用单环单轴光纤陀螺仪的4 位置寻北方法,具有寻北时间短、寻北精度高的优势;相比于采用2 个正交放置的单环单轴光纤陀螺的2 位置寻北方法,具有成本低、寻北精度高的优势。
1 双环单轴光纤陀螺仪及其精度分析
图1所示为本文提出的一种双环单轴光纤陀螺仪。光源发出的光波经光纤环行器CIR 后被Y 波导调制并分为两束光波,作为双环光纤环内顺时针和逆时针传输的两束互易性光路光波。双环光纤环中顺时针和逆时针光纤相对于整个光纤环长度中心点对称。其中,光纤环段x 和光纤环段y 均采用四级对称绕制技术,各自具有独立的光路互易性。连接两个光纤环段之间的两束光纤长度一致且相邻并排走纤,从而保证整个光纤环关于长度中心点的光路互易性,进而保障光纤陀螺仪的抗温度变化干扰能力。

图1 双环单轴光纤陀螺仪Fig.1 Dual-loop and single-axis fiber optic gyroscope
光纤环圈中两束顺时针和逆时针光波的相位差与载体旋转角速度的关系,即Sagnac 效应可以表示为[8]:
其中,L为光纤环长,D为光纤环直径,λ为光源光波波长,c为光速,Ω为载体旋转角速度。由式(1)可知,光纤陀螺仪的精度与光纤环的长度和直径成正比。因此,通过增加光纤环长和直径是提高光纤陀螺仪精度最直接有效的方法。
光纤陀螺仪的输出零位偏置与光纤环敏感轴方向相关,是载体相对惯性空间转动信息在敏感轴上的投影分量。光纤陀螺仪的检测精度与光纤环的有效传感面积即光纤环长度和直径的乘积成正比,而与其敏感轴方向无关。即理论上,采用环长为2L的双环单轴光纤陀螺仪的检测精度是1 个环长为L的单环单轴光纤陀螺仪的2 倍,是2 个环长为L的单环单轴光纤陀螺仪融合精度的倍。
因此,采用双环单轴光纤陀螺仪,一方面可以替代2 个单环单轴光纤陀螺仪来降低成本,另一方面由于增加了单个光纤环的长度从而直接提高了光纤陀螺仪的精度,最终提高了寻北仪的检测精度。
与此同时,随着光纤环长度的增加,导致光纤环绕制层数和匝数增加,会大大增加光纤环保持绕制精度的难度。由于逐层工艺误差累积,导致光纤环的光路互易性随长度增加而大大降低,最终导致光纤陀螺仪抗温度变化性能的降低。
因此,基于本文提出的光路对称的双环光纤环,可以拓展为多个光纤环段和光纤环并纤的准分布式光纤环形式,从而形成一种具有光纤环绕制难度小、光纤环单体尺寸小、可准分布式安装、应用场景适应性强的高精度光纤陀螺仪。
2 3 位置寻北算法
地理坐标系n系到寻北仪载体坐标系b系的转换矩阵可以表示为[11]:
图2所示为基于双环单轴光纤陀螺的寻北仪原理示意图,其中光纤环段x 和y 分别用于测量地球自转角速度在两个正交轴方向上的投影分量。即,寻北仪旋转平台标记有相互正交且与平台水平的x轴和y轴,其中y 轴作为寻北仪载体的敏感轴。光纤环段x 的敏感轴与寻北仪旋转平台的x 轴平行安装,光纤环段y和加速度计的敏感轴与寻北仪旋转平台的y 轴平行安装。

图2 基于双环单轴光纤陀螺的寻北仪原理示意图Fig.2 Principle diagram of north finder based on dual-loop and single-axis fiber optic gyroscope
将旋转平台按顺序旋转90°两次,分别采集0°、90°和180°三个位置处的加速度计和双环单轴陀螺仪的输出用于寻北仪敏感轴的真北方位角计算。
重力加速度在n系的投影分量可以表示为:
重力加速度在b系的投影分量可以表示为:
0°、90°和180°三个位置处的加速度计输出,分别可以表示为:
其中,KA为加速度计的标度因数,ΔuA为加速度计的零位偏置,θ为寻北仪的俯仰角,γ为寻北仪的横滚角。
通过解算式(5),加速度计的零位偏置、寻北仪的俯仰角θ和横滚角γ,分别可以表示为:
地球自转角速度在n系的投影分量可以表示为:
地球自转角速度在b 系的投影分量可以表示为:
0 °、90 °和180 °三个位置处的双环单轴光纤陀螺仪输出,分别可以表示为:
其中,KG为双环单轴光纤陀螺仪的标度因数,Φ为寻北仪所在地地理纬度值,ΔuG为双环单轴光纤陀螺仪的零位偏置,Ψ为寻北仪的敏感轴与真北方向的夹角,即方位角。
通过解算式(9),双环单轴光纤陀螺仪的的零位偏置、寻北仪方位角Ψ的余弦值和正弦值,分别可以表示为:
通过解算式(10),最终可以解算得到寻北仪的方位角ψ可以表示为:
3 实验验证
图3所示为寻北仪演示系统组成,包括单轴旋转平台、双环单轴光纤陀螺仪、单环单轴光纤陀螺仪、加速度计和信号处理单元等。图3(a)所示为基于双环单轴陀螺仪的3位置寻北演示系统。图3(b)所示为基于单环单轴光纤陀螺仪的寻北仪演示系统,分别可以开展基于1 只单环单轴陀螺仪y 的4 位置寻北实验,和基于2只单环单轴陀螺仪x和y的2位置寻北实验。

图3 寻北仪演示系统组成Fig.3 North finder demonstration system composition
寻北仪演示系统中双环单轴光纤陀螺仪的两个光纤环段长度和单环单轴光纤陀螺仪的光纤环长度均约为660 m。图4 给出了双环单轴光纤陀螺仪和单环单轴光纤陀螺仪的600s 静态输出测试曲线,其零偏稳定性(1 s,1σ)分别为0.044 °/h 和0.078 °/h。
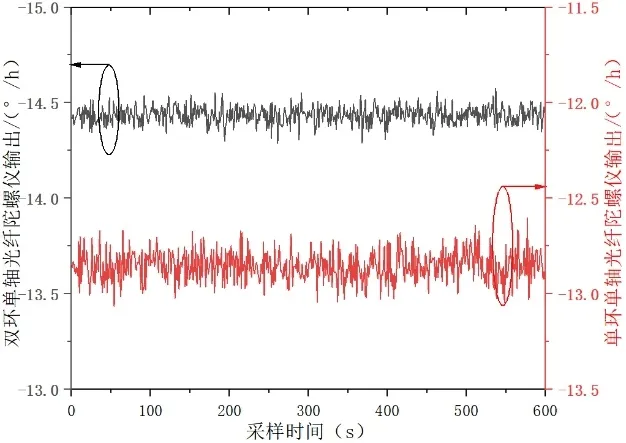
图4 光纤陀螺仪静态测试曲线Fig.4 Static test curves of fiber optic gyroscope
在单次总寻北时间180 s 相同的情况下,表1 给出了实验中3 种不同寻北方法的典型参数值。

表1 三种寻北方法的典型参数值Tab.1 Typical parameter values of three north finding methods
由于不同位置间转位及锁紧过程需要一定的时间,因此在单次寻北时间相同情况下,采用不同数量位置的寻北方案,最大单位置采样时间长度不同。其中,基于2个正交单环单轴光纤陀螺仪的2位置寻北方法,单位置采样时间最长。与此同时,由于采用2 个光纤陀螺仪和2 个加速度计,该方案的系统成本最高。
依据表1 的典型参数值,采用图3所示的寻北演示系统进行3 种寻北方法的寻北重复性实验。表2 给出了单次寻北时间均为180 s 时,三种寻北方法的多组寻北重复性测试结果。

表2 三种寻北方法的寻北重复性实验结果Tab.2 Repeatability test results of three north finding methods
从表2 中可以看出,在相同单次寻北时间下,相比两种传统的寻北方法,所提方法具有更高的寻北精度,寻北精度分别从0.054° (1σ)和0.041° (1σ)提升到0.032° (1σ),验证了新方案理论分析的正确性。与此同时,基于双环单轴光纤陀螺仪的3位置寻北方法具有较高的性价比。
4 结论
根据光纤陀螺仪的检测精度与光纤环长度和直径乘积成正比的原理,本文提出了一种双环单轴光纤陀螺仪。理论上,采用环长为2L的双环单轴光纤陀螺仪的精度是1 个环长为L的单环单轴光纤陀螺仪的2倍,是2 个环长为L的单环单轴光纤陀螺仪融合精度的 2 倍。
与此同时,根据双环单轴光纤陀螺仪可以同时测量地球自转角速度在载体两个正交轴上分量的优点,提出了一种3 位置寻北方法。理论和实验结果表明,基于双环单轴光纤陀螺仪的3位置寻北方法具有明显的精度和成本综合优势。
猜你喜欢
食品研究与开发(2022年1期)2022-01-24
北京航空航天大学学报(2021年9期)2021-11-02
水产学杂志(2021年4期)2021-10-18
百科探秘·航空航天(2017年9期)2017-12-31
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
公民与法治(2016年24期)2016-05-17
化工进展(2015年6期)2015-11-13
中国医疗美容(2015年5期)2015-02-03
化学分析计量(2014年6期)2014-04-04
