应急救援下无人机智能路径规划研究
2023-03-06 02:56:38吕德利
科技创新与应用 2023年5期
吕德利
(中电科技扬州宝军电子有限公司,江苏 扬州 225003)
航空应急救援是当下的热门话题,也是民航安全性能应当提升和研究的一大方面。无人机技术的不断发展给应急救援注入了新的活力,因此对于无人机的研究符合时代发展的需求也符合当前民航发展对安全性能的需要。针对应急救援的特殊任务需求,需要深入研究“无人机+”应用在应急救援环境下的综合应用,更好地为我国应急救援事业提供帮助,本文主要以应急救援环境下无人机任务规划为落脚点进一步深入研究,丰富我国应急救援体系。
1 创新点
对于无人机来说,需要同时实现动态和静态避障,并将静态避障和动态避障结合以达到最终目的,具有以下创新点:①降低救援风险,保证救援安全高效。应急救援环境往往复杂多变,尤其是对于地面交通不通达的区域,无法对实际环境有清晰的认识,直接由有人机进行救援是有巨大风险的,无论是对于飞行员还是被困人员来讲,都存在诸多不确定因素。但采用无人机提前进行场景探测,再通过有人机与无人机协同,能够安全高效地完成救援任务。②减少人为影响,提高空域利用率。航空应急救援的环境往往较为复杂,紧急情况下,在单一空域存在多用户时协调较为困难,仅仅依靠从业者临时进行分析判断风险较大,个人因素存在较大影响。因此对于该情境下的无人机路径规划问题进行研究,减小有人机的避障压力,提高空域利用率。③推动无人机产业链发展,迎接智能化时代到来。无人机的研发往往与应用场景密切相关,而航空应急救援是当下的热点,该需求促使无人机技术不断进步,而路径规划是运行的关键问题。无人机技术的发展是形势所趋,由于其运行环境往往是空中,因此也被称作“空中机器人”,相信不久的将来,无人机能够与人工智能有很好的碰撞与融合,迎接新时代的到来。
2 系统实现原理
在应急救援场景下,针对1架无人机和多架有人机由出发点抵达救援目标的问题进行研究。由于有人机路径往往由飞行员进行预先规划,因此此模型主要解决无人机的路径规划问题。利用动态窗口法使应急救援无人机通过合理调整轨迹,进行路线规划,实现动态避障,找到符合避障条件下的最优路径。建立无人机运动学模型,分析约束条件得到可用速度、角速度、加速度范围。设计评价函数,对距离、航向和速度进行评估,归一性处理得到。在多组可行(v,w)下,生成轨迹,进行评价,不断更新得到最优解,从而实现在应急救援环境下无人机动态避障,具体流程如图1所示。
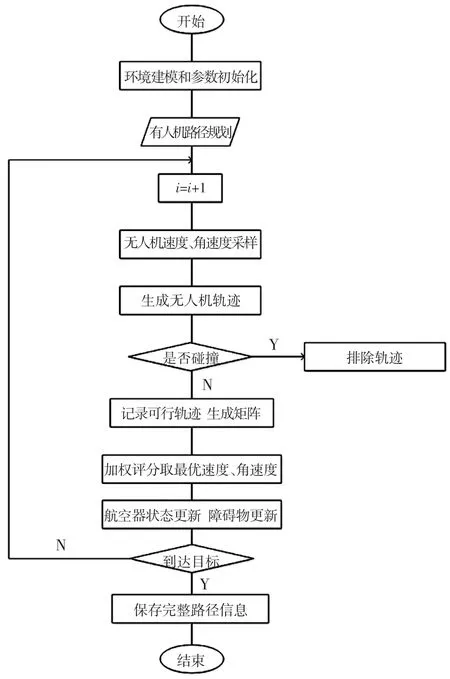
图1 无人机动态避障具体流程图
3 基于DWA算法的无人机路径规划研究
软件设计名称为基于DWA算法的无人机路径规划研究,该路径算法是在应急救援场景下,针对1架无人机和多架有人机由出发点抵达救援目标的问题进行研究。由于有人机路径往往由飞行员进行预先规划,因此,本文主要解决无人机的路径规划问题,无人机路径规划需要考虑救援时间、可运行空域和危险预判等多重问题。问题的核心在于通过合理地调整轨迹从而规避障碍物,进而实现飞行任务。影响目标的因素包括无人机本身性能的限制和障碍物机动性的影响。无人机运动模型分为无人机非全向运动模型和无人机全向运动模型,分别对无人机对应位置更新提出相应公式求出对应的圆弧轨迹,再通过评价函数选择最优的轨迹。
在单次求解局部最优解时,是以当前状态为基准,得到多组可行的(v,ω),并生成其对应轨迹,对轨迹进行评价,选择局部目标函数值最大的速度和角速度并更新状态,进行下一次求解。完整的路径规划就是通过动态窗口模型不断循环,由每一次的最优解决定下一次无人机的状态,直至运动到目标点。
求解步骤如下。
步骤1:设置环境参数和初始化变量。
步骤2:绘制有人机运行路线,设置有人机运行代码。
步骤3:设置无人机位置状态更新函数。
步骤4:生成速度、角速度采样区间。
由3个速度和角速度限制条件,取交集则得到可用的采样区间,在采样区间内速度和角速度分别按照一定的分辨率增长,双层循环嵌套可以得到对应的所有速度和角速度集合。
步骤5:动态窗口法生成可行轨迹矩阵。
由速度和角速度采样区间内的点生成对应的轨迹,并排除其中模拟轨迹与障碍物相撞的轨迹。
步骤6:对轨迹进行评价择优。
四 川 省 位 于 西 南 腹 地 ( 97°21′~108°33′E ,26°03′~34°19′N),辖区面积约 48.6 万平方千米,地跨青藏高原、云贵高原、横断山脉、秦巴山地、四川盆地等地貌单元。地势西高东低,由西北向东南倾斜,以龙门山—大凉山一线为界,东部为四川盆地及盆缘山地,西部为川西高山高原及川西南山地。气候区域差异显著,东部少日照、生长季长,西部则寒冷、冬长、基本无夏、日照充足、降水集中、干雨季分明;气象灾害种类多,发生频率高,范围大,主要是干旱,暴雨、洪涝和低温等也经常发生。
通过目标函数对每一条轨迹进行评价,选择评价分数最高的轨迹。
步骤7:更新无人机状态。
由选出评分最高轨迹对应的(v,ω),求出无人机状态更新。
步骤8:重复上述步骤,直至到达目标点。
4 系统测试及结果
4.1 实验介绍
本实验基于二维坐标系。仿真参数设置包含障碍物信息、出发点和目标点位置、无人机运动参数、速度和角速度分辨率、前向模拟时间和评价函数权重等。实际应急救援环境中,无人机周围可能存在有人机、鸟群等动态障碍物。这些障碍物的出现会对无人机的正常运行产生威胁,因此针对动态障碍物进行避障也是无人机路径规划的一个关键性问题。在本次实验中,动态障碍物设定为有人机,但对于有人机的具体运行参数不进行过多分析研究,只用于路径规划方向的研究。有人机路径规划是每次运行的第1个步骤,由手动点击生成的5个蓝色星号标记点生成平滑曲线路径,本次实验设置有人机架数为3,根据手动设定的15个必过点自动生成3条有人机运动路径,并在代码运行过程中随时间更新(蓝色星号为设置的必过点,3条不同色虚线代表其运动路径)。
4.2 实验结果分析
在运行结果界面,左下角紫色同心弧为有人机飞行起点的可选区域,标记start的点为无人机飞行起点,标记end的点为无人机飞行终点,十字、星号、方块分别表示3架有人机,其运行路径为红色虚线,全图的15个实心圆圈是静态障碍物,蓝色空心圆圈代表无人机,蓝色实线为无人机运动路径。
代码每次完整运行将生成5张图,第1张图是有人机路径规划图,代码运行会保存手动规划的路径点并生成相应的平滑曲线;第2张图能够生成有人机和无人机路径规划的动态图;第3张是无人机的航向变化图;第4张是无人机的线速度变化图;第5张是无人机角速度变化图。
4.2.1 静态避障
在加入有人机前,首先使无人机在仅有静态障碍物的环境下运行,为后续实验的有效性提供参照标准。无人机静态避障结果如图2所示。由图2可以看出无人机由(0,0)出发,最终能够实现避障到达目标点(20,20)。本次路径规划无人机运行时间为364s,运行路径长度3113.2m。
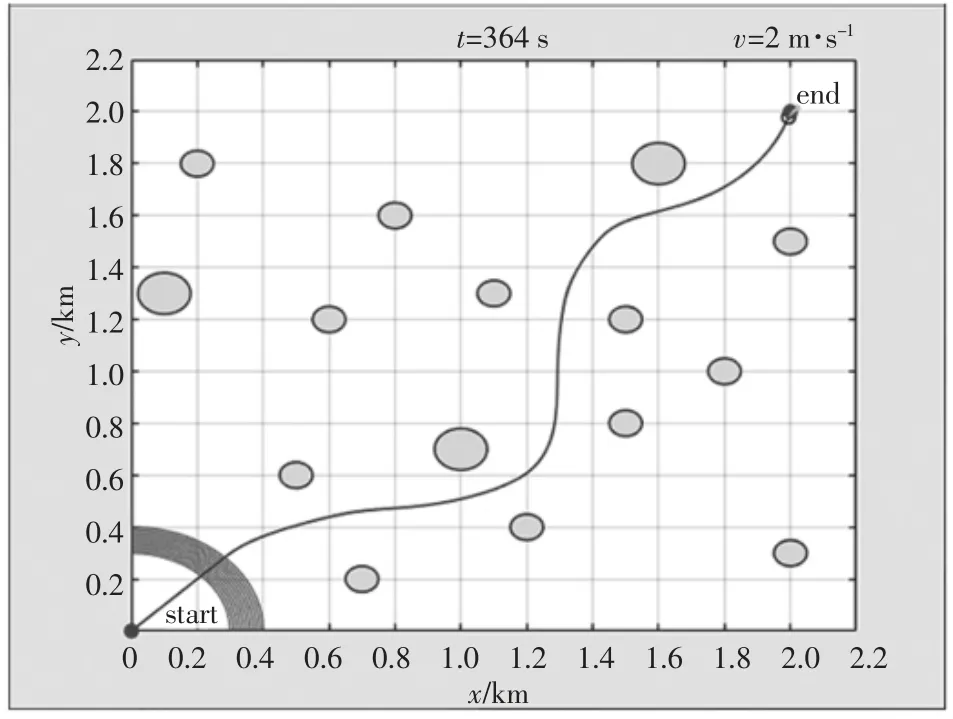
图2 静态避障运行结果
4.2.2 动态避障
动态避障即要求无人机既能避开静态障碍物,也能避开有人机,该实验参数与静态避障环境参数和权重参数相同。无人机动态避障结果如图3所示。本次路径规划无人机运行时间369s,运行路径长度3177.6 m,相较于静态避障运行时间增加1.37%,运行路径长度增加2.07%,并到达了目标点,说明该程序能够有效避障。
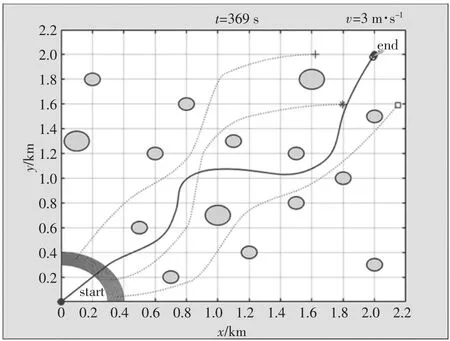
图3 动态避障实验运行结果
由无人机航向图可以看出,航空器初始航向45°对应0.785弧度,为初始化设置,该方向与起点相对目标点位置相同,若没有障碍物和有人机,那么无人机路径将会是一条连接起点和终点的直线,即航向始终为45°,但受到障碍物影响,航向发生波动,由图像可以看出在运行时间为70s左右时,航向小幅度减小,对应路径可以看出,是由于坐标为(5,6)的障碍物对路径产生了影响,随后航向曲线又迅速上升,无人机左转,是由于规避星号障碍物导致的,并通过不断避障最终达到目标点。该图能够清晰反映出无人机方向随障碍物影响的变化趋势。
由无人机线速度波动图(图4)可以看出,无人机初始速度设置为1m/s,由于速度越大评价得分越高,因此在满足避障要求时无人机都会以最大速度运行。在开始时有加速阶段,接近目标时进行减速。在中间若出现波动,则表明无人机为了避障进行了短暂的减速再加速的过程从而绕开障碍物。本次实验未出现波动。

图4 无人机线速度变化
通过观察可以发现,角速度变化趋势与航向变化趋势一致,航向变化即角速度经过时间累加后的结果。
由以上3个对照实验结果分析可知目标函数的设定对于无人机路径的生成有着不可忽视的影响,不同的权重设定表示着不同的运行需求,过度设定航向参数可能导致始终朝向目标点而无法及时避障;过度设定避障参数可能导致运行路径与时间大幅增加;过度设定速度参数则可能导致始终以最大速度运行而无法抵达目标点或发生碰撞。因此同时考虑这3个因素并选取合适比例是非常必要的,对结果生成有着至关重要的作用。
5 结束语
本文根据本次研究内容及各种算法适用性确定采用动态窗口法,建立了相关数学模型,确定了求解步骤,相较于传统动态窗口法,本文增加了有人机,相对于无人机来说,需要同时实现动态和静态避障。并对静态避障和动态避障结果进行简单分析。
该方法能够实现在环境参数一定时,手动规划有人机路径,自动生成无人机路径的动态图,模拟出随时间变化的动态避障过程,并对于每一次运行同时生成无人机航向变化图、速度变化图和角速度变化图,便于分析避障的有效性。
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
电子制作(2017年24期)2017-02-02 07:14:16
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
法大研究生(2015年2期)2015-02-27 10:13:55
城市道桥与防洪(2014年5期)2014-02-27 07:26:44