基于线结构光视觉的负载柔性臂振动位移测量*
2023-03-02 06:43马天兵方佳欣孙志成
组合机床与自动化加工技术 2023年2期
杜 菲,马天兵,陈 凯,方佳欣,孙志成
(安徽理工大学a.深部煤矿采动响应与灾害防控国家重点实验室;b.机械工程学院,淮南 232001)
0 引言
随着机器人技术的快速发展,柔性臂因具有良好的操作性,紧凑的结构以及少量的能量消耗等优势在工业领域内得到广泛的应用。但在柔性臂末端执行机构搬运重物时因柔性臂阻尼小,刚度低,易受外界干扰等特点柔性臂会产生较大的弹性变形,进而会产生高频的弹性振动,引起柔性臂末端振动位移偏移量较大,导致在使用柔性机械臂时其操作的精准度降低,执行速度变的缓慢,严重情况下甚至会对结构造成破坏。另一方面,末端负载的存在也会对柔性臂整体系统的结构特性造成影响,造成不可逆的破坏。
在对柔性臂末端负载情况分析时,末端负载的质量变化也会引起柔性臂结构参数的改变。马驰骋等[1]研究了双连杆机械臂在具有负载情况下的振动控制,研究结果表明负载的质量变化对系统的动力学响应影响很大。刘广瑞等[2]研究柔性臂末端质量的变化对其运动过程中稳定性的影响,结果表明柔性臂的模态质量会跟随末端质量的变化而改变。徐超等[3]将视觉测量法运用于大柔性结构的振动测量之中,取得了较好的测量效果。徐秀秀[4]利用视觉测量算法研究了柔性臂的振动测量。邱志成等[5]利用双目视觉实现了柔性板的振动位移测量与控制。MA等[6]提出了一种柔性臂的弯曲和扭转变形实时传感与重构方法。ABDOLLAHPOURI等[7]采用激光位移传感器测量压电柔性梁的位移。
在测量方式上,接触式测量会给被测结构带来负载效应,影响系统的结构特性。而非接触式测量方法不接触测量物体,测量结果准确可靠,更多的在振动测量中。为此,本文以刚柔耦合双关节机械臂为研究对象,在柔性臂末端添加负载,设计基于线结构光视觉的振动测量系统。首先搭建线结构光测振系统,接着对线结构光光条中心提取方法进行改进,最后设计实验进行验证。
1 线结构光视觉测量系统
1.1 系统框架设计
线结构光视觉测量系统是一种将工业相机和线激光器相结合组成的测量系统,主要包括激光发生器、工业CCD相机、目标平面和计算机。激光发生器和CCD相机具有相对固定的位置,当激光器的光条投射到目标平面时会形成光条,利用CCD相机进行实时采集,通过算法提取光条纹中心像素坐标以此来求取特征点的坐标信息,系统具有全局信息丰富和抗干扰能力强等优势,将其运用在本实验中的柔性臂振动测量中。如图1所示为设计的整个系统的框架结构,整个系统由硬件模块与算法模块两大部分组成。硬件部分由机械臂、线结构光测量系统和计算机组成;算法模块包括相机标定、光平面标定和光条中心特征点处理3部分。
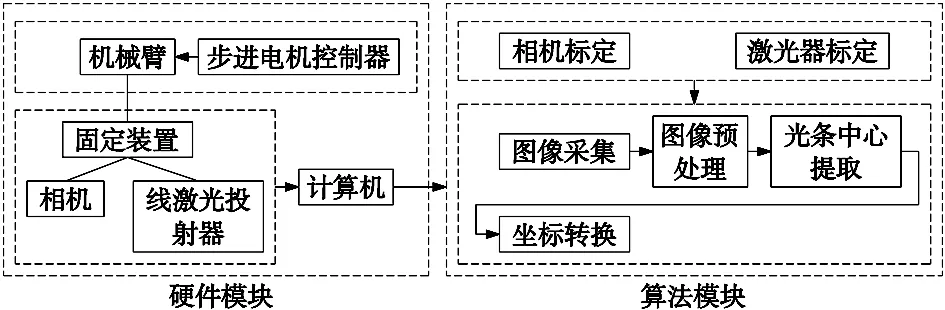
图1 系统整体框架图
1.2 实验装置
如图2所示,本实验装置为线结构光视觉负载柔性机械臂振动位移测量系统,整个装置由刚性臂、柔性臂、57步进电机、42步进电机、工业相机、激光器、数据采集卡和计算机组成。其中刚性臂选用碳钢材料,长度为0.2 m,截面尺寸为0.015 m×0.006 m,对应J-5718HB3401的步进电机,柔性臂选用不锈钢材料,长度为0.3 m,截面尺寸为0.015 m×0.001 m,对应J-4218HB2403的步进电机,选择某公司的型号为DMK33G618的网口工业CCD相机,激光发生器选择某公司的均匀红光一字线激光器。在柔性臂末端负载处粘贴一块轻质的泡沫板来作为目标平面,保证激光器射出的线条能在目标平面上显示。线激光器和相机分别固定在步进电机的两侧支架上,使相机光轴与激光器中心轴线的交点基本落在泡沫板中心,与机械臂一起随电机转动,将相机拍摄的图像经过软件分析处理后,将像素坐标系下的光条像素点转换成相机坐标系下的位置坐标,再通过LabVIEW软件的处理从而获得柔性机械臂末端振动位移信息。
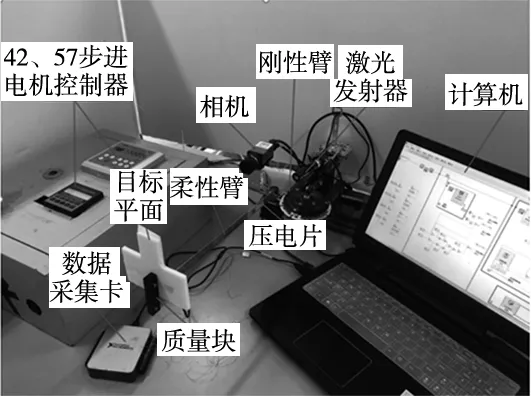
图2 实验平台实物图
2 线结构光测量流程
2.1 光条中心提取
在利用线结构光进行视觉振动测量时,图像由CCD相机采集,为系统提供原始的视觉图像信息。在采集过程中,由于受到环境、光线以及激光发生器和相机自身参数的影响,光条图像往往清晰度和对比度不够高,其中包含的干扰信息和冗余信息较多,如图像噪声、复杂的背景等,不能够突出图像的重点,这将直接影响光条中心的提取,对实验结果造成影响。为了减小或者消除图像中的噪声影响,首先对相机采集的光条图像进行滤波去噪、阈值分割、形态学处理等预处理操作,以增强图像质量,提高信噪比,从而获取更多有用信息,保证后续光条中心的精确提取。如图3所示为光条图像的预处理效果图,图3a光条为相机拍摄的原图像;图3b为中值滤波处理后的图像;图3c是利用Otsu阈值分割效果图;图3d是形态学处理后的图像。处理后的图像与原图对比分析,图像中的干扰噪声和无效的背景信息被大量消除。

(a) 原图 (b) 中值滤波 (c) Otsu阈值分割图像 (d) 形态学处理图图3 光条图像预处理效果图
通过相机进行光条纹图象采集时,激光器发射的光条纹像素宽度仅为3~12个宽度,通常在提取光条中心时需要得到更高精度像素级坐标以保证后续实验操作的准确性[8-9]。常用的光条提取方法极值法、灰度重心法、方向模板法等。其中,极值法在光条图像信噪比大的情况下提取的效果较差。灰度重心法在计算过程中由于像素点和噪声的影响,会对计算结果造成一定的偏移误差。方向模板法在遇到物体表面有负载的纹路时,由于模板方向的有限性会使光条向更多方向发生偏移。
本文提取算法基于骨架细化的灰度重心法,在光条图像经过预处理操作后,对光条纹图像进行骨架细化操作,获取单像素光条,从而避免遇到直接使用传统提取方法时计算量大,精度低等问题。经过骨架细化迭代算法得到细化后光条图像的像素级坐标位置,以骨架提取的光条像素为中心,在其左右位置取K个点,求这2K+1个点的重心。利用均方灰度梯度法准确寻找中心点法线方向,最后利用灰度中心法在法线两端方向分别取n个点计算出光条中心点。
为验证光条中心提取精度效果,将骨架提取的像素级精度中心坐标与改进后的灰度重心法取得的亚像素级精度中心坐标进行对比,如表1所示。在进行运算时以原始图像的左上角为坐标原点来计算光条中心坐标,在骨架提取的基础上利用改进的算法能精确计算出像素坐标,得到更为准确的坐标位置,最终将像素坐标系下的坐标点转换到三维坐标系下的坐标点,为系统标定提供可靠、精确的光条信息。
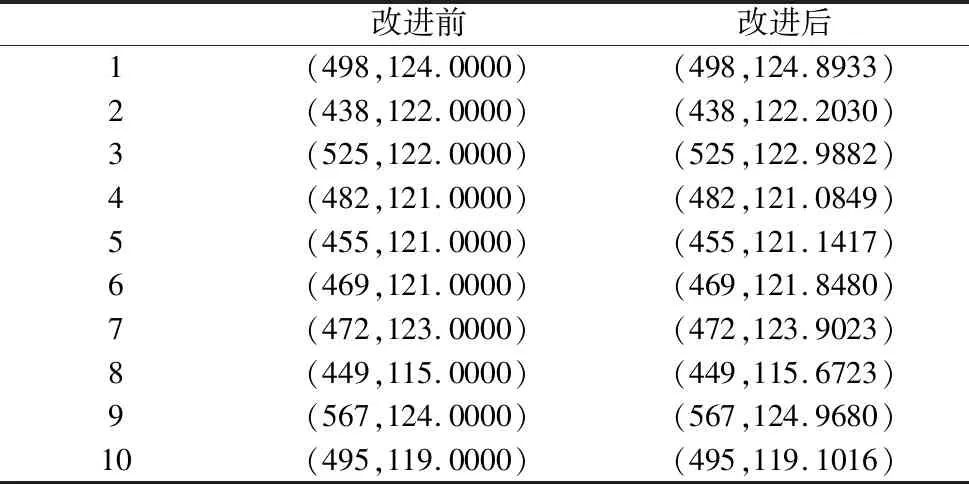
表1 灰度重心法前后提取结果
2.2 系统标定
2.2.1标定原理
线结构光视觉系统标定包括相机标定和线结构光平面标定两部分。相机标定部分主要是针对相机的内外参数进行标定,选用目前较为成熟的张正友相机标定法[10],具有标定简单和精度高等优点,在此处就不再赘述。相机标定完成以后,使用相机对激光平面进行标定,获取光平面参数方程。本文选用棋盘格作为靶标参考物,保证激光线条投射在棋盘上长方形黑色区域内,提取光条中心点的特征信息,拟合光条纹中心线得到相机坐标系下的直线方程,再计算出棋盘平面在相机坐标系下的方程,通过直线方程和棋盘平面方程可求出特征点坐标在相机坐标系下的值[11]。结构光视觉传感器模型如图4所示。

图4 结构光视觉传感器模型
2.2.2标定结果
由于张正友标定法具有简单和精度高等优点。本文选择MATLAB相机标定工具箱进行标定,能够快速、准确的计算出相机内外参数,具有灵活的操作标定流程,根据标定的结果实时反应参数变化。选取25张不同位姿的棋盘格图片按顺序载入MATLAB工具箱,得到的第一次重投影误差,剔除第一次标定误差较大的图片再进行第二次标定。
经过计算和优化处理后得到相机的内部参数,如表2所示。
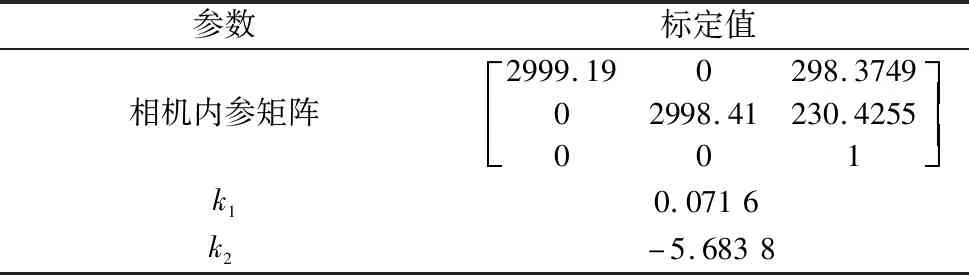
表2 相机内参标定结果
k1、k2为径向畸变系数。完成相机标定后,将2.2.1节中的光条图像依次导入MATLAB编写的光平面标定程序中,完成图像的畸变矫正后,选取光条图像的感兴趣区域(ROI),经过预处理操作后,再利用本文改进的光条中心提取算法完成光条特征点的提取工作。
完成对所有采集到的图片的处理后,再经过编写的MATLAB程序执行一系列计算后得到方程参数,可得到光平面方程:
0.1838Xc-4.2379Yc-Zc+251.5193=0
(1)
结合相机模型和光平面方程,可得到线结构光视觉系统数学模型为:
(2)
式中,(XcYcZc)T为相机坐标系中Q点的位置;(u,v,1)为像素坐标系中的Q′的位置。
3 振动测量实验与结果
基于上文搭建的线结构光测振系统,在柔性臂末端固定质量为0.012 kg的质量块,模拟实际负载情况。在柔性臂转动过程中,对两台步进电机的细分、角速度和运行步数分别进行改变,设置4组不同的参数具体如表3所示。
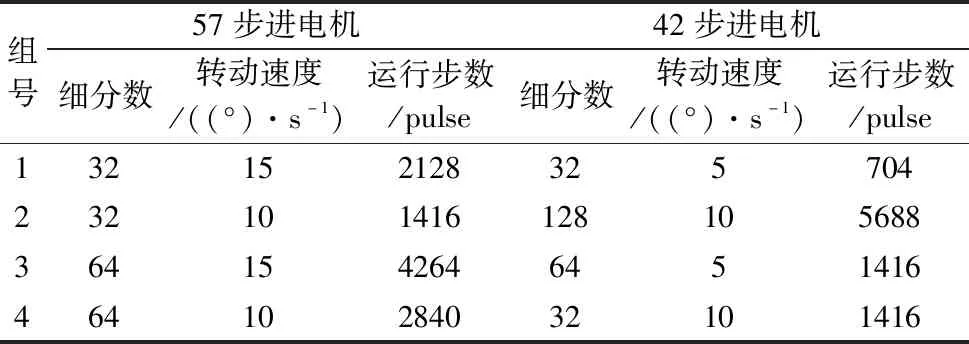
表3 步进电机参数设置
在进行实验时,将刚柔机械臂杆调至同一水平直线作为系统运行的初始位置,设置2个步进电机同向转动,选择相机拍摄帧率为90 fps,为保证2种方法测量实验的结果具有对比性,数据采集卡的采样频率同样设置为90 Hz。同时按下2台步进电机和相机采集按钮,步进电机运行时间设置为8 s,分别得到线结构光视觉测量和压电测量的4组实验结果。对获取每一组实验的线结构光测量数据和压电测量数据利用MATLAB软件对数据进行分析处理,时域结果如图5所示,进行FFT变换得到对应的频谱如图6所示(考虑篇幅限制,仅展示第一组的结果)。
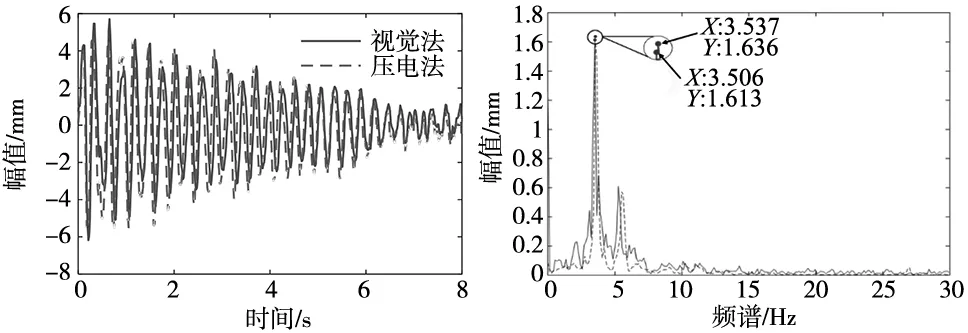
图5 时域结果对比 图6 频域结果对比
根据图5和图6可得出,利用线结构光视觉测振法和压电测振法所得到的结果变化趋势一致。为进一步对测量结果进行验证,定义两种测量方法的差异:
式中,A视觉、A压电分别表示线结构光测量法和压电测量法得到结果的频谱图中的峰值。根据上式可得出4组测量结果差异分别为:2.3%、1.4%、0.3%、0.8%,平均差异为1.2%。
从实验结果可以看出,2种测量方法在时域和频域所测得的结果保持一致,在误差在允许范围之内,所测得柔性臂一阶振动频率保持一致,均在3.5 Hz左右,与理论仿真值相吻合。与常用的压电测量法进行对比分析,验证线结构光视觉测量的可行性,能够满足对柔性臂的振动测量。因本实验探究的内容在一阶模态频率下即可完成,所以仅研究低频状态下的实验内容,根据以上实验结论,可分析得出在实验设备条件的允许下可进行高频实验探究。
4 结论
针对负载柔性臂的振动位移测量研究,采用线结构光技术进行测量,通过改进光条中心提取方法,提高特征点提取精度,再进行实验对该方法进行可行性验证。实验结果表明,针对柔性臂的一阶模态振动,实验结果平均差异率仅为1.2%,从而验证了线结构光测振系统方法的可行性和有效性。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
小哥白尼(军事科学)(2022年2期)2022-05-25
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
汽车维修与保养(2020年11期)2020-06-09
红领巾·萌芽(2019年8期)2019-08-27
中国与非洲(法文版)(2017年10期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
CHIP新电脑(2016年3期)2016-03-10