
光电设备伺服系统机械谐振检测和抑制
2023-03-02 05:42杨松涛和丽清
激光与红外 2023年1期
杨松涛,和丽清
(中国电子科技集团公司第十一研究所,北京 100015)
1 引 言
在光电火控、光电侦察、光电制导等武器系统中,光电伺服系统是重要的组成部分,光电伺服系统为光电武器系统提供稳定、灵活、快速的运动平台。光电伺服系统的精度和动态性能决定了整个光电武器系统的快速性和视轴稳定性。同时搭载在机载、舰载、车载和弹载平台上的长焦、高分辨率光电系统对光电伺服系统的精度和动态性能又有着越来越高的要求,因此,提高光电伺服系统的精度和动态性能就成了关键问题。而光电伺服系统在设计时,认为机械轴弹性系数无穷大,是刚体[1],不可能产生机械谐振。但实际机械系统不可能是理想刚体,驱动部件和负载相对运动会产生机械谐振问题。机械谐振的存在不仅制约着光电伺服系统性能的提升,而且会带来诸多不利影响,如:缩短机械设备寿命,甚至损坏机械系统;降低驱动系统性能,严重时导致系统振荡;产生噪声污染,降低环境适应性。因此,机械谐振抑制已成为高性能伺服驱动的重要研究课题之一[2]。本文针对光电伺服系统机械谐振问题,分析了光电伺服系统机械谐振检测方法,并基于检测结果通过设置改进型陷波滤波器的可配置参数,以实现有效抑制机械谐振的功能,最终实现提高光电伺服系统性能的目的。
2 光电伺服系统谐振频率特征检测
在光电伺服系统中,要抑制机械谐振,先要获得精确的谐振频率数值。机械谐振频率检测,首先通过驱动环节给伺服系统施加激励信号,然后通过伺服系统安装的传感器(电流、速率、角度和加速度传感器)获得伺服系统激励后的响应数据,最后通过数据处理获得较为精确的机械谐振频率数值。能够测量到伺服系统谐振后传感器数据的前提是激励信号通过驱动环节放大后能使机械系统产生谐振,故激励信号的选择是机械谐振检测最为重要的环节。
选取的激励信号应是持续的并且随机独立的,且有较宽的频谱特性。从原理上看,白噪声是最理想的激励信号[3],这一平稳随机过程的每一个瞬间取值都是统计独立的,并且均值为零、谱密度为非零常数的平稳随机过程。但是在实际应用中是很难生成真正意义上的白噪声。因此常用循环周期充分长的伪随机序列作为激励信号。
逆m序列[4]和m序列[5](最长线性反馈移位寄存器序列(LFSR))都是较好的伪随机序列,都近似于白噪声,m序列含有直流成分,作为激励信号对系统存在“净扰动”,而逆m序列克服了这一缺点,同时逆m序列的随机性也优于m序列。因此,逆m序列常常用于伺服系统的激励信号。其性质如下:
(1)逆m序列在一个循环周期内,“0”和“1”的数目均等;
(2)逆m序列前半周期与后半周期为逆重复;
(3)逆m序列与原m序列不相关,即他们的相关函数等于零;
逆m序列不仅是非常好的伪随机序列,同时它也便于嵌入式系统实时生成,非常适合伺服系统机械谐振的检测。获取逆m序列首先要生成m序列,m序列生成简单、规律性强。一般来说,一个n级线性移位寄存器能产生的最长周期等于N=2n-1。设n级移位寄存器的初始状态为:a0a1…an-1,经过一次移位后,状态变为:a1a2…an。其中,an可通过下面的递推方程获得:
an=c1a(n-1)⊕c2a(n-2)⊕…⊕c(n-1)a1⊕cna0
(1)
其中,ci∈(0,1),i=1,2,3,…,n。ci的取值决定了移位寄存器的反馈连接和序列的结构,所以ci的取值决定了反馈逻辑。反馈逻辑可用特征多项式f(x)表示:
(2)
其中,ci∈(0,1),i=0,1,2,…,n。n是寄存器级数,c0=1。线性反馈移位寄存器的反馈连接状态是用特征多项式来描述的,在上面公式(2)中所表示的特征多项式实际上就是反映线性反馈寄存器反馈逻辑的一种本原多项式。在构成m序列前,必须找到本原多项式。对于n级移位寄存器的m序列的本原多项式,一般可以通过查表来完成。因此,只要确定了本原多项式,所产生的序列就确定了。即使线性反馈移位寄存器的初始状态不同,所产生的周期序列仍是同一序列,只是序列的初始相位不同。
而逆m序列是通过m序列产生的。设M(k)是周期为N、元素取值为0或1的m序列,S(k)的周期为2、元素取值依次为0或1的方波,将这两个序列按位进行异或运算,得到复合序列是周期为2N、元素取值为0或1的逆m序列,记为IM(k)。因此,逆m序列生成方法简单,便于嵌入式系统实时产生。
激励信号确定形式后,还需要考虑以下几个因素:
(1)驱动环节的输出幅值(即激励信号的放大比例),幅值太大则有可能使被激励系统进入非线性区,太小则不能产生机械谐振;
(2)逆m序列的移位脉冲频率至少应大于机械谐振频率的3倍;
(3)逆m序列的周期时间应大于1.5倍的机械谐振的过渡过程时间。
光电伺服系统传感器采样频率为2 kHz,选取移位脉冲频率为0.5 kHz,其序列周期为2.044 s。n=9逆m序列的数据、自相关特性和功率谱如图1所示。

图1 n=9逆m序列及其特性图
3 光电伺服系统谐振频率抑制
机械谐振抑制的主要方法有:(1)基于加速度状态反馈的机械谐振抑制[6-7]:电机加速度反馈能够改变伺服系统的等效负载转动惯量比,进而对系统机械谐振进行抑制。其缺点是给伺服系统带来相位严重滞后。(2)基于滤波器的机械谐振抑制:一般选用数字低通滤波器或者数字陷波滤波器来抑制机械谐振。其中数字陷波滤波器可通过参数调整,实现实时调整陷波滤波器的陷波中心频率、陷波宽度和陷波深度,因此其在实际工程中得到了非常广泛的应用。(3)基于现代控制理论的机械谐振抑制:基于扰动观测器的机械谐振抑制[8-10]、采用具有约束的预测控制策略抑制机械[11]、基于滑模控制器的谐振抑制[12]和基于LMI的H∞控制方法的机械谐振抑制[13]等。
目前,在光电伺服系统应用中,通常采用陷波滤波器来抑制机械抖振,与使用加速度反馈抑制机械谐振相比,其只对谐振频率附近的幅频和相频特性进行调整,不会使整个系统产生严重的相位滞后;与使用先进算法等谐振抑制手段相比,其使用相对成熟,不改变原有系统闭环设计、调试方法,工程实践案例丰富,设计简单方便。
改进型陷波滤波器的传递函数如下所示:
0<β≤1,0<α<1
(3)
改进型滤波器的幅频特性如下所示:
(4)
改进型滤波器的相频特性如下所示:
(5)

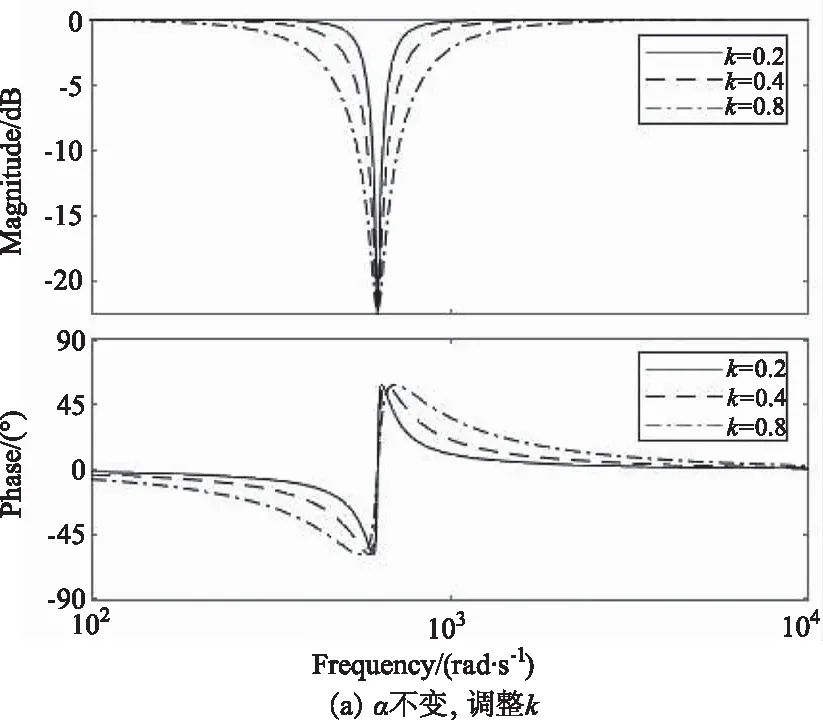
图2 在β=1条件下,改进型陷波滤波器随k和α变化的波特图
由于改进型陷波滤波器会在ω<ωn的频带产生相位滞后,影响闭环伺服系统稳定性,从公式(5)可以看出参数β的存在可以对β=1时的改进型陷波滤波器的ω<ωn频带相位进行调整,减小β=1时的改进型陷波滤波器的相位滞后。但引入参数β对改进型陷波滤波器在ω=ωn的陷波深度和陷波带宽都产生影响。其中,改进型陷波滤波器在ω=ωn处的幅值增益为:
在ω=ωn处滤波带宽为:
在α和k不变条件下,调整β的改进型陷波滤波器的幅频和相频特性如图3所示。从图3可以看出,选择合适的参数β,可以在ω<ωn的频带获得了较大的相位补偿,并且不影响谐振抑制效果。

图3 在α和k不变条件下,改进型陷波滤波器随β变化的波特图
4 实验数据
某光电伺服系统,速度采样频率为2 kHz,根据采样定理,系统能获得0 Hz~1 kHz带宽范围内的反馈信号(实际传感器带宽小于300 Hz)。选用移位脉冲频率0.5 kHz、9级线性移位寄存器的逆m序列作为激励信号,DFT分析获得的频谱结果如图4(a)所示。通过系统谐振后的频谱曲线可获得相关谐振参数为:谐振中心频率为:10.25 Hz和23.94 Hz,谐振频率宽度为1 Hz和2 Hz,谐振幅值约为:20 dB,系统有两个谐振点。因此,配置2个改进型陷波滤波器参数分别为:ωn=64.4和150.4(rad/s),k=0.11,α=0.09,β=1。将同样的逆m序列在系统输入驱动器前进行陷波处理,激励后的频谱特性如图4(b)所示。可以看出,机械谐振受到了极大地抑制。

图4 谐振系统及抑制效果的频谱图
5 结 论
光电伺服系统的机械谐振成因复杂,在工程上为了能够很好地检测和抑制机械谐振对光电伺服系统性能产生的影响。本文首先选取具有零均值、随机独立的伪随机序列——逆m序列作为激励信号,驱动装置将宽频带的激励信号施加于系统中,通过对传感器数据的频谱分析,分离出机械谐振相关参数(谐振中心频率,谐振频率宽度,谐振峰值),然后通过在线配置改进型滤波器的相关参数,完成谐振频率地抑制。实验结果证实,文中的相关方法和方案可有效地检测和抑制光电伺服系统机械谐振。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
一重技术(2021年5期)2022-01-18
测控技术(2018年4期)2018-11-25
测控技术(2018年12期)2018-11-25
北京航空航天大学学报(2016年4期)2016-02-27
西部广播电视(2015年3期)2016-01-15
弹箭与制导学报(2015年1期)2015-03-11
电机与控制应用(2015年2期)2015-03-01
广西科技大学学报(2015年4期)2015-02-27
全球定位系统(2014年5期)2014-08-21
