
水产养殖精准投饲机的设计与试验*
2023-03-01 05:25叶有乐张桂中黄杨清宋帅帅
南方农机 2023年6期
叶有乐 , 张 浪 , 张桂中 , 黄杨清 , 宋帅帅 ,4
(1.河源市灯塔盆地农业高新技术产业示范区,广东 河源 517000;2.紫金农业机械推广服务中心,广东 河源 517000;3.广州木鱼科技有限公司,广东 广州 510000;4.河源市农业技术推广中心,广东 河源 517000)
0 引言
饲料成本占养殖成本的一半以上,所以降低饲料成本是降低成本的重要方法[1-2]。传统网箱养殖大多数是依靠人工来投放饲料,由于养殖技术或经验的差异,投饲量差异明显,可能会造成饲料浪费[3]。
我国水产养殖大部分依靠人工进行投饲,小部分网箱养殖使用简单的机械装置,将其安装在网箱浮板上进行撒料,类似陆地池塘撒料装置。投饲设备的研究仍然需要学习借鉴国外先进的技术,在国内,大规模养殖几乎很少见到先进的、完善的投饲装备系统[4]。西南大学的栗鹏辉制造了一套鲟鱼幼鱼自动养殖系统,其主要由新型PLC、螺旋杆送料机构、减速电机、撒料盘、液位传感器、自动双通道排污装置、水质监测探头、DTU无线传输设备等组成,参考人工养殖流程设计程序,可实现各养殖步骤间的自动协调,性能测试和鲟鱼试养实验表明该装置投饲效果良好,一定程度上可为大型全自动养殖提供技术参考[5]。西北农林科技大学的景新等针对我国室内工厂化水产养殖机械化和自动化水平低、人工投饲劳动强度大的现状,利用轨道传动、传感器和PLC技术,设计了一套新型室内工厂化水产养殖自动投饲系统。利用软件三维实体建模对行走装置、料仓、定量控制装置、抛撒装置、上料装置和自动控制装置等关键零部件进行了详细的设计和参数确定,试验结果表明:该投饲机投饲质量高、效率高且稳定性良好[6]。中国水产科学研究院渔业机械仪器研究所的崔龙旭等为了减少工厂化水产养殖过程中的人工成本和饲料成本,设计了一套基于西门子S7-200PLC的轨道式工厂化水产养殖自动投饲系统。该系统能够实现对工厂化水产养殖车间鱼池的准确定位、精准投饲和投饲数据记录储存,初步试验运行结果表明:该自动投饲系统能够稳定运行,行走速度为10 m/min~13 m/min,投饲精度在95.9%以上,定位精度最大偏差为43 mm,满足初始方案设计要求[7]。总体而言,我国水产养殖投饲系统的应用和改良具备了一定的研究基础。
西方许多发达国家的网箱养殖产业基本抛弃了落后的人工投喂方式,在水产养殖领域已经大量地使用自动化投饲系统,实现了水产养殖业从粗放型到精细型、自动型的转变[8-10]。挪威AKVA公司设计了Marina CCS系列的船上自动投料系统,利用管道高速气流让颗粒饲料通过喷射器,使其从下料器进入到主风力管道,再利用自动目标分配阀将饲料投放到相应的网箱中。该系统可以大大减少人工劳动力,提高投饲效率,使其更加高效稳定[11]。加拿大Feeding Systems公司生产的自动投饲系统主要用于各种大型网箱养殖群、陆地上的水产养殖和育苗过程等,可以根据不同的饲养对象(如虾、比目鱼、鳃鱼等)使用不同的进给料控制程序,该系统通过自动送料系统和上位机软件的结合,大大提高了对饲料的利用率[12]。美国ETI公司开发的FEEDMASTER投料系统已经向多个国家出口,该系统输送颗粒饲料时饲料破碎率低、投饲精度高、运行稳定可靠。该系统使用PLC控制技术,每分钟的最大投饲量为250 kg,支持一个直径约10 cm的给水管道,可以同时为60个网箱送料[13]。国外水产养殖投饲研究相对我国已经成熟化、规模化,实现了精准投饲自动化[14-15]。
本文针对水产养殖中的投喂作业强度大、饲料浪费严重等问题设计了一种适用于水产养殖的远程自动风送投料装备,并对其关键零部件进行了设计和参数确定。
1 整机和零部件设计
1.1 整机设计
在整机结构布局上,首先要考虑机器作业条件和机器性能的稳定性,结合作业特点以及在实际作业中拆卸和安装是否方便等因素对整机做出合理布局,要求适用性、通过性良好,结构紧凑。水产养殖精准投饲机主要由排肥器、管道、分料板、竖向丝杆电机、机架、横向丝杆电机、料箱、驱动电机、风机等组成。投饲机整机结构,如图1所示。
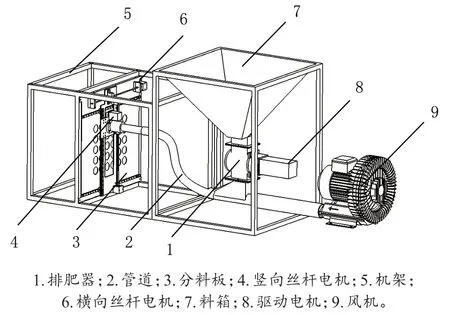
图1 投饲机整机机构
工作原理:饲料或肥料由人工倒入料箱,控制系统设置排肥时间,启动风机;启动下料器电机,电机通过链传动驱动下料器旋转;通过排肥器将肥料排到管道中,由风机将饲料吹到目标池塘或者高密度养殖的集装箱内,完成定时、定量、定点投饲。在进行应用时,分料移动单元具有横向移动和竖向移动的功能,控制输送管的喷料端对接分料板上的通孔,从而根据投饲需要,选择性地进行单目标或多目标投饲。该机适用性良好,操作简单,主要有以下三个特点:1)结构简易且紧凑,易于移动和操作;2)机器采用变频器变频,风机转速和下料器转速可改变,便于试验;3)可远程输送颗粒饲料,适合不同的养殖环境;4)风机采用高压旋涡风机,其体积小,重量轻,可承受最高150 ℃高温。
1.2 关键零部件设计
1.2.1 控制系统
控制系统由上位机工业电脑、下位机可编程控制器Arduino、驱动电机、横向丝杆电机和竖向丝杆电机等组成,控制系统使用两个变频器分别控制排肥器的下料速度和风机转速,适用于试验调节下料器的转速和风机速度;使用三相电供电,安装漏电保护开关。控制系统的人机交互界面,如图2所示。
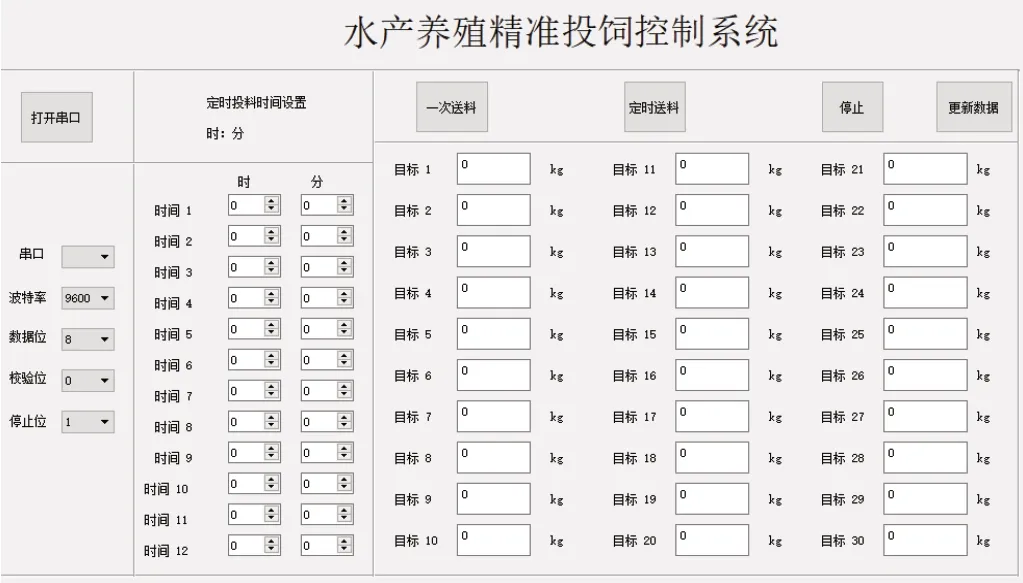
图2 控制系统人机交互界面
控制系统初始化,打开串口,判别是否定时送料,设置送料时间,设置多目标中的投饲量,点击一次送料,通过风机吹送完成送料。
1.2.2 风机参数选择
试验投料距离定为50 m,每分钟的最大投饲量定为12 kg。输送物料量计算公式如下:
式中,G为输料管平均输料量,单位为kg/h;α为储备系数。
输送浓度μ为:
式中,Gs为物料质量流量,单位为kg/h;Ga为空气质量流量,单位为kg/h;γa为空气密度,单位为kg/m3;Q为空气流量,单位为m3/h。
送料水平沿程静压损,由达西公式(3)两边积分得公式(4):
式中,λa为摩擦阻力系数;d为管道直径,单位为mm;va为输送风速,单位为m/s。
气体在管道内流动微分形式的伯努利方程为:
F为输料管断面积,则由可得:
局部压损时,下料器的压力损失式为:
式中,Δpn为输料管起端绝对压力;C'为与气料混合室相关的系数,一般取0.15~0.25。
根据设计参数,选择亚士霸电机,型号为HG-3800S,额定电压为380 V,最大风压为42 kPa,最大吸压为38 kPa,最大风量为400 m3/h,噪声为70 dB,风管口径为60 mm。
1.2.3 排肥器
外槽轮排肥器是自动投饲系统的关键部件,主要作用是让颗粒饲料在一定密封要求下,从料箱下落到管道中。排肥器由外槽轮转子、进料口和出料口组成。外槽轮下料器由轴带动外槽轮转动,把颗粒饲料从进料口拨到出料口,排肥器机构简图如图3所示,其驱动三相异步电动机通过链传动带动外槽轮主轴转动。

图3 排肥器简图
1.2.4 电动机参数选择
由于外槽轮下料器旋转下料时,除了受到颗粒饲料带给叶轮的压力外,还受到部分颗粒饲料卡在叶轮和槽室之间的阻力,因此所需电动机输出功率Pd为:
式中,Pw为外槽轮下料器所需的功率,单位为kW;ηa为传动系统的总效率。
外槽轮下料器所需功率为:
式中,T为外槽轮下料器阻力矩,单位为N·m;n1为外槽轮下料器转速,单位为r/min。
一般根据经验,选择转速为1 390 r/min的电动机。总传动比的确定:
式中,nm为电动机额定转速;n2为外槽轮工作转速。
一共有两级串联传动比,分别为减速器传动比和链传动的传动比。所以总传动比为:
式中,id为链传动的传动比;i为减速器的传动比。
最后根据传动比确定两个大小链轮的直径和减速器的类型,外槽轮排肥器和链传动的参数具体如表1所示。

表1 外槽轮排肥器和链传动的参数
2 试验与分析
在河源市龙川县水产养殖试验基地进行试验,水产养殖品种为鳕鱼,分别设定1 000 g、1 500 g和2 000 g为目标投饲量,出料口采取封闭塑料包装采集投饲量,分别进行3次试验取平均值,以损失率作为整机性能指标。基地试验实景如图4所示,试验得出的数据如表2所示。
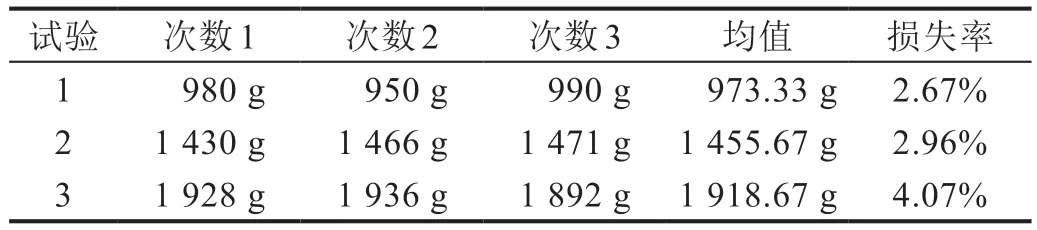
表2 整机性能试验表

图4 基地试验
计算得出1 000 g、1 500 g和2 000 g为目标投饲量的损失率分别为2.67%、2.96%和4.07%,均小于5%。表2的试验数据和作业情况表明:该机损失率较小,投饲量完整度较高,作业质量高,满足设计要求。
3 结论
通过实地调研和文献查阅,课题组针对水产养殖中的投喂作业强度大、饲料浪费严重等问题,设计了一种水产养殖精准投饲机。该机可定时、定点、定量完成投饲目标,是一种多功能水产养殖投饲机。试验表明:该投饲机损失率在5%以下,满足农艺要求。精准投饲机的设计在一定程度上可缓解人工投饲劳动强度大、机械化程度不高等问题,为我国的水产养殖投饲研究提供一定的技术参考。
猜你喜欢
模具技术(2022年4期)2022-10-17
当代水产(2022年3期)2022-04-26
当代水产(2021年8期)2021-11-04
北广人物(2020年8期)2020-03-19
当代水产(2020年2期)2020-03-17
当代水产(2019年7期)2019-09-03
数码世界(2018年10期)2018-11-13
作文通讯·初中版(2017年12期)2018-03-31
西安航空学院学报(2018年1期)2018-02-05
农产品加工(2016年16期)2016-09-27
