基于GNU Radio和USRP的自适应干扰对消系统设计及实现
2023-03-01 08:05孙林歌付孝龙秦悦仪
电子制作 2023年2期
孙林歌,付孝龙,秦悦仪
(1.空军工程大学 信息与导航学院,陕西西安, 710077;2.空军工程大学 防空反导学院,陕西西安, 710051;3.长安大学,陕西西安, 710061)
0 引言
在收发共用天线的雷达、通信系统中,由于天线旁瓣的存在,导致接收机在接收期望信号的同时往往会接收到干扰信号,降低后续信号处理的质量。自适应干扰对消技术是一种主动对消这种从天线旁瓣进入的干扰信号的技术[1~3]。近年来,许多学者从空间对消[4]、射频对消[5]和数字对消[6]三个方面研究了自适应干扰对消技术的实现。空间对消利用辅助天线接收干扰信号用于对消主天线接收的干扰信号;射频对消在信号进入模数转换器之前,在射频域对消干扰信号;数字对消在信号经模数转换后在数字域实现对干扰的对消。本文采用的是基于空间对消的自适应干扰对消实现方法。
现有文献对自适应干扰对消系统的原理、性能[7]、效能影响因素[8,9]和实现方法[10,11]进行了大量的理论研究和仿真分析,但是对于实际信号接收环境下的干扰对消模型实现及分析研究较少。采用搭建系统收发原型平台进行对消模型实现和效果分析的方法,存在实现成本高、搭建系统复杂的问题,不适合用于对原理演示验证和效果分析。
本文提出利用软件无线电开发平台GNU Radio和通用软件无线电外设(Universal Software Radio Peripheral,USRP)组成的半实物仿真系统用于自适应干扰对消系统的仿真分析,即解决了基于Matlab、LabVIEW等纯仿真软件信号不真实的问题,又避免了搭建原型系统成本高、实现难的问题。首先分析了所利用的GNURadio平台特性和USRP硬件结构;随后对自适应干扰对消原理及其半实物仿真实现方法进行了分析;最后基于所建立的半实物仿真系统,分析了基于空域对消的自适应干扰对消系统性能。
1 GNU Radio和USRP概述
■1.1 GNU Radio
GNU Radio是一个可用于模拟和评估通信、雷达等无线传输系统性能的开源开发工具包。由于GNU Radio的模块化和可模拟大量场景的特点,它被无线电业余爱好者、研究人员和无线开发工程师广泛用于对无线通信理论和实际系统的研究[12]。GNU Radio模块根据不同应用场景,主要是用C++或Python语言编写。通过在系统的发射端和/或接收端对数据流进行处理,GNU Radio可用于对实际通信和雷达系统建模和评估。此外,GNU Radio通常与真实的硬件一起使用,进行半实物的空中(over-the-air,OTA)实验。
GNU Radio通常运行在Linux或Unix操作系统环境下,尽管在Windows和Mac操作系统中也有对GNU Radio的支持。GNU Radio中包含大量开源的信号处理、实用程序库和硬件接口块,使得基于GNU Radio的信号处理开发十分快捷。每个流程图,或应用程序,是由各种模块组成的,称为块,每个块之间的连接被称为端口。在GNU Radio中,可以创建自定义块,称为树外(out-of-tree,OOT)块。整个流程图是由各种OOT和/或已经实现的块的端口相互连接而成的。GNU Radio具有以下特点:
使用C++/Python编程:原始的信号处理模块用C++编程实现,所有图的构建、策略决策和非性能关键的操作都在Python中进行。
具有固定和可变速率模块:这一模块使得软件除了支持同步数据流,还支持可变数据流。
配置容易:信号处理块的参数可以在运行时修改,并且信号处理图本身的拓扑结构也可以根据需要进行修改。
用户界面设计方便:图形用户界面(GUI)使用Python中的工具包直接建立,最大限度地提高了跨平台的可移植性。此外软件还自带许多时域和频域可视化数据流小工具(例如,多通道数字示波器、FFT等),方便对数据的显示。
丰富的信号处理模块。GNU Radio提供的库非常丰富,包含文件的输入和输出、TCP、高速A/D、D/A、声卡、各种滤波、NCO、VCO、调制器、解调器、前向纠错等。根据不同的应用,用户可以在不额外编写任何信号处理模块的情况下,实现所需功能。
■1.2 USRP
随着通信和雷达领域对信号处理方式多样化和灵活化要求的增加,传统的以硬件为基础的信号处理难以满足这些需求。USRP通过对模拟数据进行模数转换后使用软件而不是硬件来进行信号处理,使得通过一个相对便宜的硬件设备和简单的步骤实现和设计软件无线电系统成为可能。USRP就像一个无线电系统的数字基带和中频(IF)部分,它使通用计算机成为高带宽的软件无线电。主机CPU将处理所有的波形,如调制和解调,而USRP则处理所有的高速通用操作,如抽取和插值。
■1.3 基于GNU Radio和USRP的软件无线电系统结构
图1为基于GNU Radio和USRP的软件无线电系统构成要素及结构图。
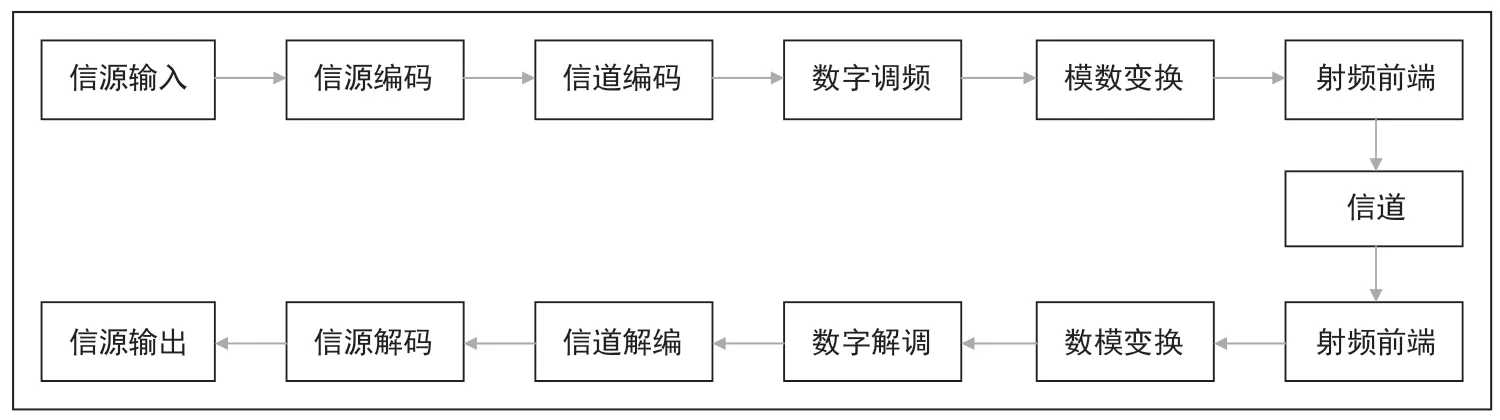
图1 基于GNURadio的软件无线电系统结构
图1中,在接收时,射频前端可以将接收的高频信号转化为较低的中频(IF)信号;在发射时,射频前端将需要发射的中频基带信号调制到高频载波上,并通过天线发射。模数转换器(ADC)和数模转换器(DAC)是连接USRP处理的真实模拟信号和GNU Radio软件处理的离散数字信号之间的重要桥梁。
2 自适应干扰对消原理
■2.1 干扰对消原理
干扰对消技术是一种利用辅助通道对消非相干干扰的技术,对消的基本结构如图2所示。图2所示场景中,期望信号S(n)被噪声N1(n)干扰。噪声干扰N1(n)信号可以看成是噪声参考信号N2(n)通过一个具有脉冲响应为w(n)的系统的输出。同时,将获得的噪声分量参考N2(n)送入一个有限脉冲响应滤波器,该滤波器利用自适应滤波器输出和主信号之间的差异进行自适应调整。当调整权系数使得自适应滤波器的脉冲响应等于期望信号中叠加的噪声分量,那么自适应滤波器的输出就是所期望的信号S(n)。
■2.2 自适应滤波算法
图2中的自适应滤波器采用有限冲击响应滤波器,自适应滤波器系数采用基于归一化最小均方误差(Normalized Least Means squares,NLMS)算法来计算。归一化最小均方误差算法是一种递归算法,该算法可以实现图2中期望信号中混合的干扰信号和参考信号之间的均方误差最小。基于归一化最小均方误差算法的自适应干扰对消算法基本原理是:
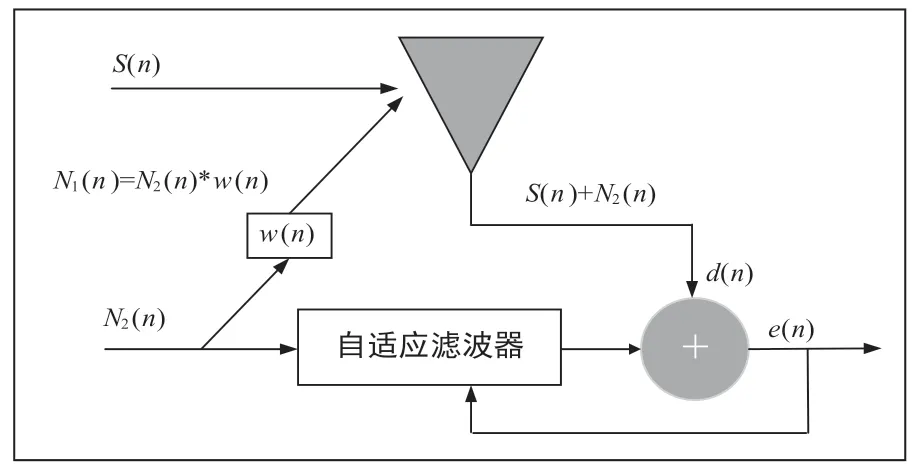
图2 基本干扰对消结构
对于离散采样时刻n,有:
其中,y(n)是自适应干扰对消的输出,w(n)是自适应滤波器的权系数,x(n)是输入的参考干扰信号,d(n)是包含期望信号和干扰信号的输入信号,e(n)是自适应滤波器的输出和输入信号之间的误差信号,µ为自适应滤波器的步长因子,α为保证算法在时仍稳定的系数,本文中取α= 0.001。图3为自适应干扰对消算法流程图。
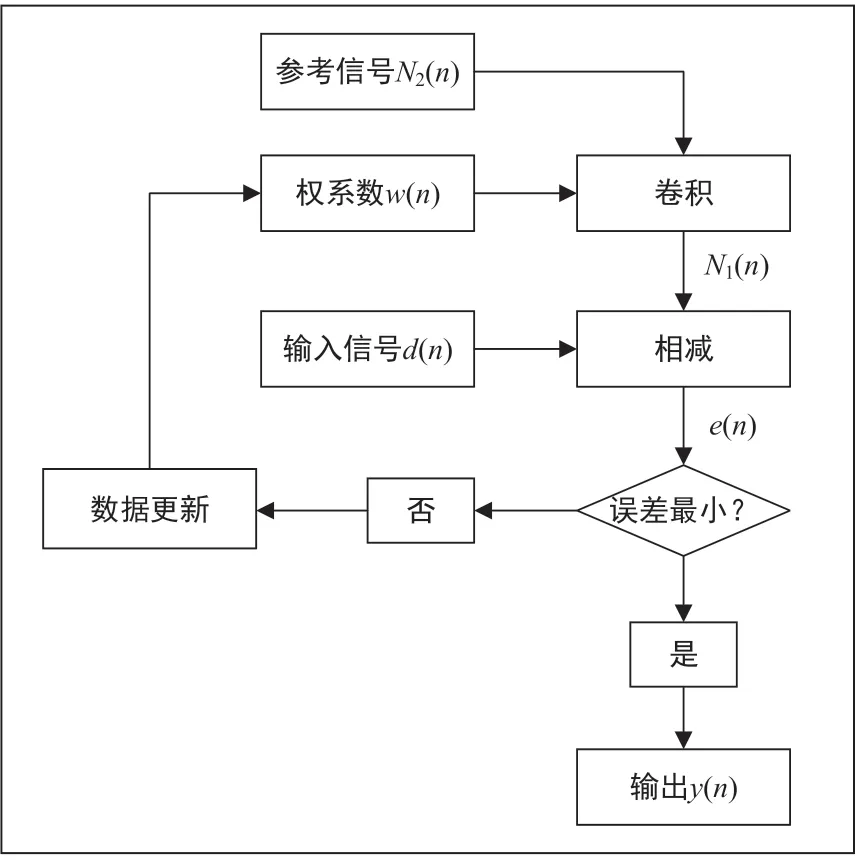
图3 自适应干扰对消算法流程图
若通过调整权系数使得公式(1)对应的自适应滤波器的
输出和干扰信号相同,则公式(2)输出的误差信号e(n)只包含期望信号s(n)。如果自适应滤波器的输出和干扰信号不同,则通过公式(3)在步长因子µ的控制下调整权系数w(n)使得自适应滤波器的输出和干扰信号相同。步长因子µ的选取取决于对期望信号和干扰信号的先验知识,当µ取值较小时,获得最优权的时间较长,但是所得到的解的误差较小;当µ取值较大时,获得最优权的时间较短,算法稳定性较高,但是获得的解的误差增大。µ的取值范围为:
3 自适应干扰对消系统构建及分析
■3.1 系统构建
本文构建了如图4所示的系统用以评估自适应干扰对消系统的对消性能。为了直观分析自适应干扰对消器的对消性能,由信号产生器产生的单载频正弦信号经功分器后一路信号送入USRPB210的一个输入端作为输入信号,另一路信号送入USRPB210的另一个输入端作为干扰输入信号。两路信号经USRPB210采样后送入笔记本电脑中的GNU Radio流程图进行处理,并将自适应干扰对消处理后的信号经傅里叶变换后给出频谱图。图5为本文自适应干扰对消系统的GNU Radio流图。
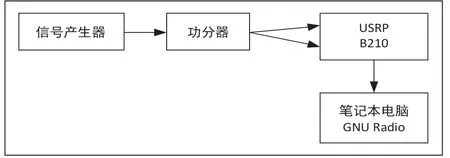
图4 干扰对消分析系统
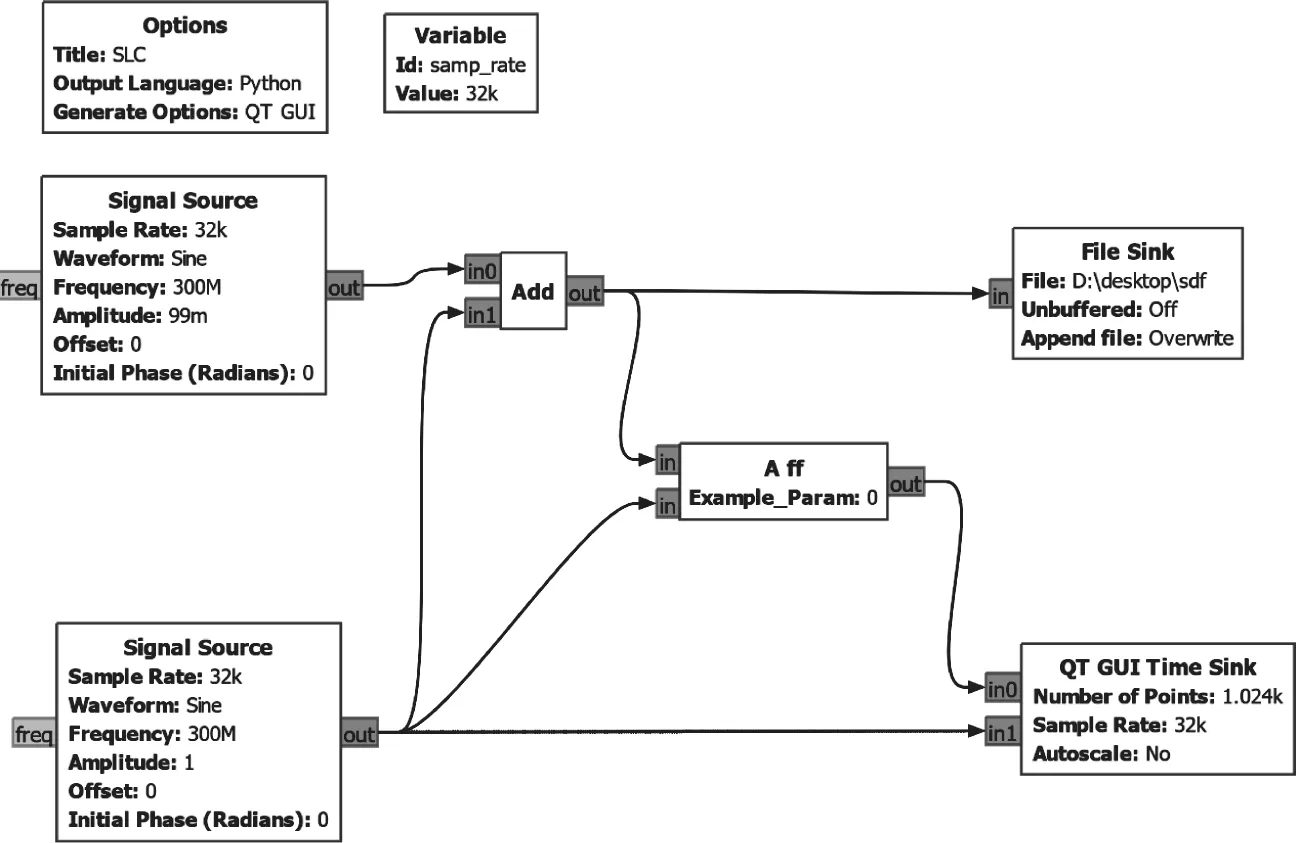
图5 基于NLMS的自适应干扰对消流图
■3.2 系统性能分析
3.2.1 系统参数设置
本文分析中对信号产生器、GNU Radio和USRP Ettusr adioB210的参数设置如下。
信号产生器:
(1)频率:300MHz
(2)信号波形:正弦连续波
(3)信号幅度:-60dBm
GNURadio及自适应滤波器参数设置:
(1)采样率:32kHz
(2)滤波器阶数:2、3、5
(3)步长因子:µ=1
USRPEttusradioB210参数设置:
(1)采样率:32kHz
(2)中心频率:300MHz
(3)时钟频率:30.72MHz
3.2.2 系统输出结果
在自适应滤波器阶数分别取2、3、5时,得到经干扰对消后输出信号的频谱如图6、7、8所示。从系统输出结果可以看出,滤波器阶数为2、3、5时,在中心频率附近的干扰抑制性能均为40dB左右。之所以获得这么高的抑制量是由于经功分器后输入B210两个输入端的信号差异较小,这使得干扰对消性能得以大幅提升。输出结果中,在中心频率之外的干扰信号是由于自适应滤波器输出信号与参考信号之间存在差异导致的。
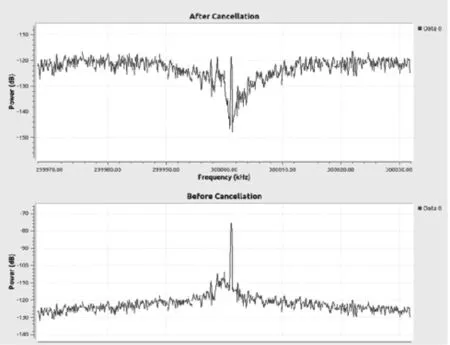
图6 自适应滤波器阶数为2
4 结语
本文分析了自适应干扰对消器的基本原理,并基于GNU Radio流图和EttusradioB210分析了自适应干扰对消器的性能。所搭建的系统验证了自适应干扰对消器可以获得40dB以上的干扰对消性能。同时,系统的干扰对消性能还可以通过提高USRP设备的采样位数以及增大动态范围来获得。
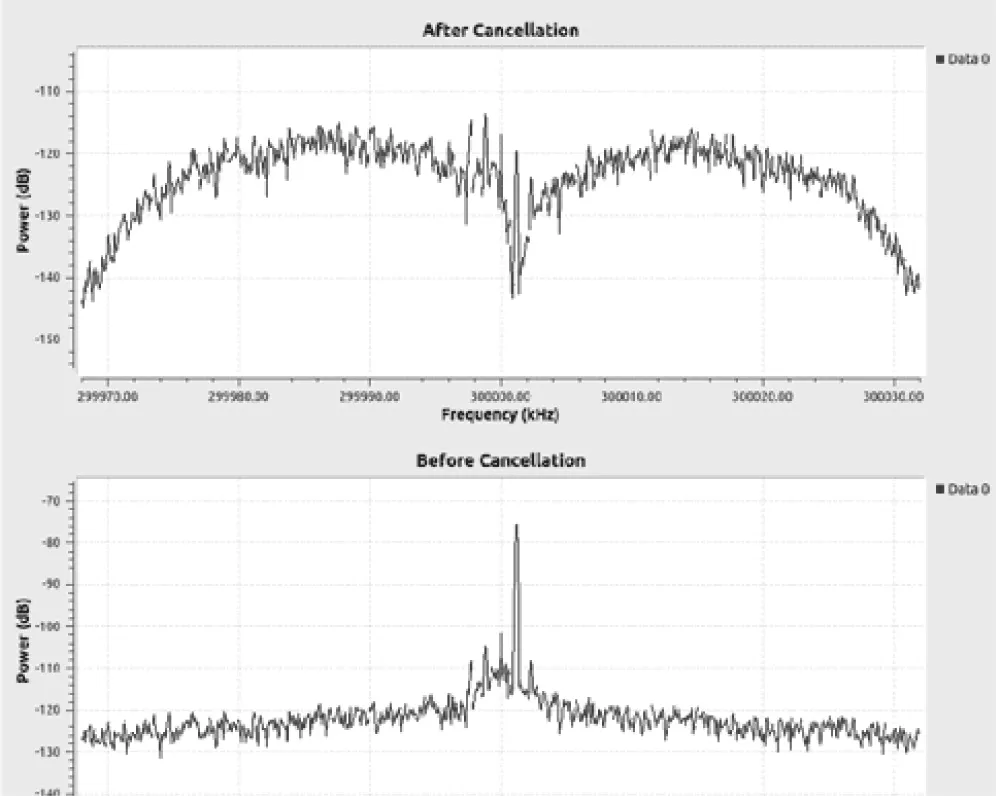
图7 自适应滤波器阶数为3
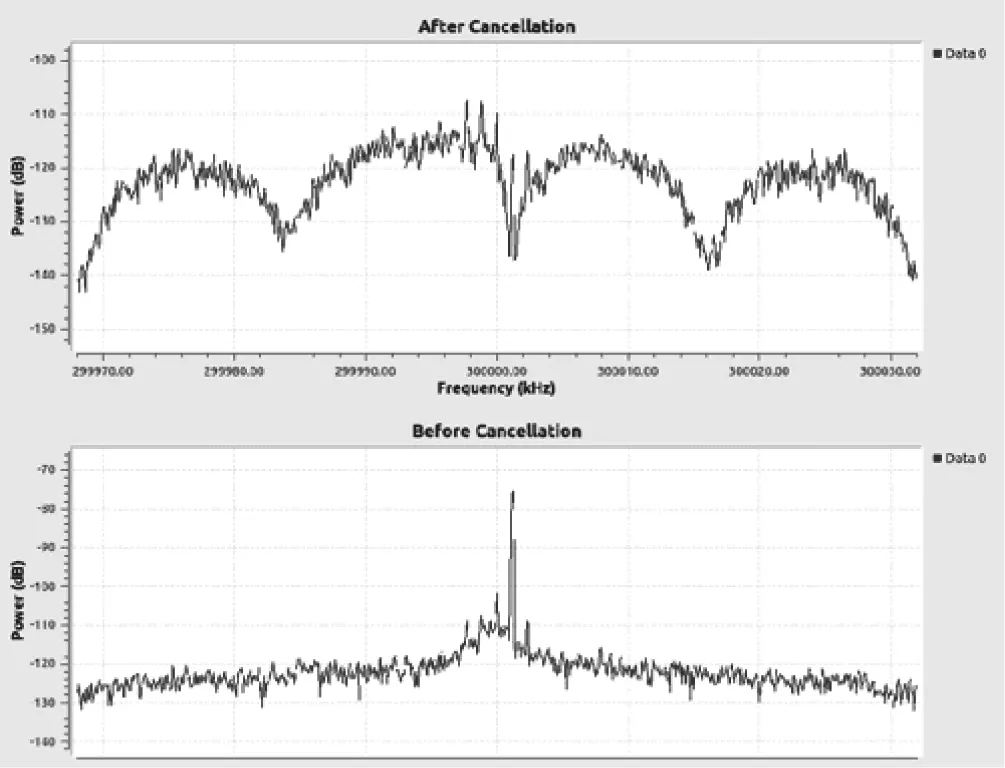
图8 自适应滤波器阶数为5
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
海军航空大学学报(2021年1期)2021-09-01
华东师范大学学报(自然科学版)(2021年3期)2021-06-03
通信电源技术(2020年22期)2020-03-27
陕西科技大学学报(2019年4期)2019-07-04
教育教学论坛(2018年39期)2018-09-25
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25