基于离线编程的机器人写字实验教学设计
2023-02-28 16:35金花雪朱来发张善勤薛祎鹏
现代信息科技 2023年20期
金花雪 朱来发 张善勤 薛祎鹏
摘 要:为满足工业自动化对教学内容改革的迫切需求,设计了基于InteRobot离线编程的机器人写字实验,以“设计—仿真—运行”的模式进行教学。在PC端导入UG10.0图形,通过InteRobot编辑和模拟仿真图形运动轨迹,输出PRG格式的控制代码和Inc工程文件。运行端为HSR-620 6自由度工业机器人,在基坐标下调整好Z轴高度差,配合自制的装载软毛笔模型进行X轴、Y轴的轨迹运动。该实验有利于学生对工业机器人控制技能的掌握,拓宽学生软件编程方面的视野,激发学生的创新思维能力,提升学习兴趣度和增强动手操作能力,最后学生平均成绩提高了8%。
关键词:工业机器人;InteRobot离线编程;模拟仿真;3D打印
中图分类号:TP39;G434 文献标识码:A 文章编号:2096-4706(2023)20-0190-05
Design of Robot Writing Experiment Teaching Based on Offline Programming
JIN Huaxue, ZHU Laifa, ZHANG Shanqin, XUE Yipeng
(College of Mechanical Engineering and Automation, Huaqiao University, Xiamen 361021, China)
Abstract: To meet the urgent demand for teaching content reform in industrial automation, a robot writing experiment based on InteRobot offline programming is designed, and teaching is conducted in a “design-simulation-running” mode. Import UG10.0 graphics on the PC, edit and simulate the motion trajectory of the graphics through InteRobot, and output control code and Inc engineering files in PRG format. The running end is the HSR-620 6 degree of freedom industrial robot, which adjusts the height difference of the Z-axis in the base coordinate and cooperates with a self-made loading soft brush model to perform trajectory motion on the X-axis and Y-axis. This experiment is beneficial for students to master the control skills of industrial robots, broaden their horizons in software programming, stimulate their innovative thinking ability, enhance their interest in learning and hands-on operation ability, and ultimately increase their average score by 8%.
Keywords: industrial robot; InteRobot offline programming; simulation; 3D printing
0 引 言
工业机器人被称为“制造业皇冠顶端的明珠”,其研发、制造、应用能力是衡量一个国家科技创新与高端制造水平的重要标志,也是未来我们迈向制造强国的必由途径。2021年12月工信部等15部门联合印发的《“十四五”机器人产业发展规划》提出,国内机器人仍将保持超过35%的高速增长,到2025年机器人产业营业收入年均增长超过20%[1,2]。随着智能制造水平的提高,机器人产业快速发展导致的人才缺失问题也越来越突出,因此培养一批具备扎实的工业机器人理论知识和实操能力的人才输送到国家各岗位将是高校和职业院校的重要责任之一[3-6]。
赵祥等人[7]以“工业机器人编程及应用”课程为研究对象,分析了该课程的教学特点。基于学生综合素质能力培养,以“学做融合、双元结构”教学组织形式为保障,制定了符合学生发展的课程改革方法与实施方案,调动了学生的课堂积极性和主动性。通过德、智、能三方面育人自然融合,有效提高了教學质量,为学生在机器人领域的学习与发展奠定了基础。黄灿英等人[8]从教学资源的优化整合、教学环节设计与实施及教学评价三个方面详细分析“工业机器人离线编程”课程混合式教学模式的构建思路,并分五个阶段阐述“工业机器人离线编程”课程混合式教学改革的实施过程。从效果来看,应用混合式教学模式能提高课堂教学效率,提高学生的创新能力,满足应用型人才培养的要求,适应时代的发展要求。沈晔超等人[9]基于“1+X”证书制度的试点和推广,以“工业机器人应用编程”课程为例,通过师资培养提升教师技能,依托岗位需求创设沉浸式教学情境,以赛促教助推学生技能提升,把握新技术、新工艺的发展。
为有效提升学生编程能力及动手操作能力,并顺应工业自动化对教学内容改革的迫切需求,面向本科生开设了“工业机器人离线编程操作实验”课程。简单的文字或图形通过机器人配套的示教器在线编程,而复杂的文字或图形则需结合离线编程软件InteRobot进行编辑与运动轨迹仿真,并拷贝到机器人示教器运行。这种“设计—仿真—运行”的教学设计打破了传统的教学方式,提高学生对机器人的编写操作能力以及创新能力,使其有更广阔的想象空间[10-13]。
1 机器人实验教学设计
1.1 机器人教学方案设计
如图1所示,机器人教学方案主要分为离线编程和机器人操作两个部分,采用“设计—仿真—运行”的教学模式,打破传统的单调在线操作模式,让学生实际结合时代发展需求,学到更多的知识[14-17]。离线编程部分要求学生掌握UG建模和InteRobot软件模拟仿真,机器人操作部分学生需熟练运用示教器和运动轨迹的控制。根据现有机器人台数和教学资源进行分配,将学生分为5~6人一组。
1.2 机器人实验教学平台
为满足实验教学需求,选择HSR-JR620工业机器人系统作为基础搭建实验教学平台,如图2所示。系统主要分为3个部分:工业机器人系统、PC端离线编程系统、机器人运行端操作。
工业机器人系统主要由机器人、示教器、配电箱组成,如图3所示。系统中采用的HSR-JR620为6自由度关节机器人,有效负载12 kg、重复定位精度±0.06 mm、最大运动半径1 555 mm。
机器人的6自由度相当于有6个关节(或6个轴),A1—A6(或J1—J6):A1为底座的左右转动;A2为大臂的前后运动;A3和A4为小臂的前后、左右转动;A5和A6为手腕的转动,因此关节机器人也称为机械臂。其6个关节由6个电机实现不同的运动形式,A1—A3的驱动电机安装在机器人外侧,A4—A6的驱动电机则安装在里面。Hpad-201示教器是用于机器人的手持编程器,可以实现控制系统的主要控制功能,包括编程及控制机器人的运动,其操作模式为触摸屏结合周边按键一起使用。配电箱是机器人系统中的控制柜,里面装有6个驱动数字显示屏,监测机器人6个关节的动态。示教器和配电箱之间的网络接头和4个其他信号接头通过浅灰色电缆线连接,如图4所示。
PC端离线编程通过三维建模软件UG10.0和机器人自配的软件InteRobot进行,学生通过UG软件规划图形或文字,导入到InteRobot中。从simpletool工具中选择写字工具pen,并仿真其运动轨迹。因模拟仿真不受实验场地等因素的限制,在教学中加入离线编程内容,一是可以提升写字的难度,挑战更多复杂的图形,二是通过运动仿真及时发现错误的轨迹,提高学生学习的积极性及创新性,进而也能预防一些安全事故。本实验要求每位学生熟练掌握InteRobot的轨迹设计和运动仿真[18-20]。
机器人运行端通过自制的3D打印模型装载了一支大楷软毛笔及运行平台,平台上加入方形亚克力板和一张A4纸,学生要在规定的时间内调整好坐标系及Z轴高度,控制机器人执行端按设计轨迹运行[21-23]。作为实验教学的最后环节,运行前准备工作是否成功就在这一环节中体现。在这个环节要求学生必须要站在机器人运行可到达区域外,保证学生的安全和实验的顺利进行。当实验结束时,学生要提交实验报告记录整个实验环节的重点和难点及完成情况。
整个实验过程以团队合作形式进行,此模式有利于学生迅速掌握知识要点,提高团队合作能力和动手操作能力,进而能培养精益求精的工匠精神。
2 机器人离线编程及运行操作
2.1 机器人离线编程
要求学生熟练操作编程软件及界面,掌握机器人各轴运动规律。本次设计采用的是系统自带编程软件InteRobot,首先在机器人库里选择HSR-JR620型号机器人,simpletool工具中选择pen,并导入UG10.0建立的图形或文字。其次确认工件坐标系、图形路径、机器人进入和退出路径,进行线上仿真运动轨迹,这里要注意的是,仿真轨迹范围需在297 mm×210 mm的长方形区域内,因此整体图形的尺寸不能超出此范围。最后输出PRG格式的程序控制代码,保存Inc工程文件。图5是离线编程模拟仿真的示例“华侨大学”。
教学中加入離线编程,一是可以拓宽学生的知识面,更全面的认识机器人这门课的魅力;二是提高学生的创新思维能力,挑战更多不一样的图形;三是离线操作不受实验场地的影响,除了课上的练习,在课下学生根据自己时间安排巩固和提高编程熟练度。
2.2 机器人运行端操作
运动轨迹模拟仿真成功的Inc工程文件和输出的PRG格式控制代码要进行存储并拷贝到示教器上,调整坐标及参数,机器人准备执行。根据设计的轨迹要求,在书写平台上有3个自由度,即X、Y轴的前后、左右移动,Z轴的上、下移动。
InteRobot离线编程软件的工件坐标和实际应用的BASE基坐标有Z方向的高度差,这个高度差指的是底座到一轴和二轴交线处的Z方向的差值。因此必须先调整基坐标下Z轴的高度,防止因为高度不合适软毛笔撞到平台上。
在机械臂末端加载软毛笔的装置,结合SolidWorks建模及3D打印技术制作出一个模型,如图6所示。此模型包含两个通孔,直径为62.2 mm和11.2 mm,分别可以安装机械臂末端和大楷型号软毛笔,并固定。这个装置有利于安装、拆卸和更换雕刻工具,根据不同的平台或材料迅速更换软毛笔或者雕刻刀。若需要换成搬运的机械爪,只需把模型拆下来即可。
3 实验教学效果
工科机械类学生或多或少对机器人有较多的兴趣和好奇,在教学中不仅能操纵机器人还可以学习离线编程,模拟仿真中提前预览运行效果,大大提高学生上课积极性。
3.1 学生实验效果
学生进行实验时以组为单位逐步完成“设计—仿真—运行”操作步骤,进一步提高学生的团队合作精神和精益求精的工匠精神。
在“设计—仿真”环节,首先导入UG 10.0建立的图形或文字,调整其颜色、位置和姿态,并插入CLS格式刀位文件,注意点是出刀位文件的模型和导入软件的模型要一致。其次是运动模拟仿真,需设置进退刀点,距离可设为50~100 mm,其作用是让机器人进入和退出主路径有一个缓冲和过度的作用。最后要添加工件坐标系,其参数值为示教器中的基坐标,输出PRG格式的控制代码,保存Inc工程文件。
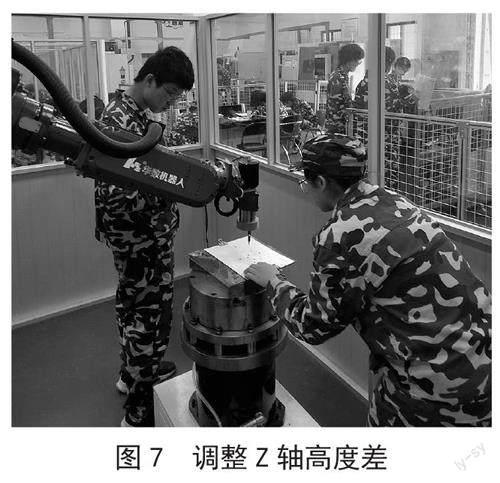
在“运行”环节,由于软件的工件坐标和实际应用的基坐标有Z方向的高度差,此值为机器人属性面板的基坐标系Base相对于世界坐标系world的Z值,即Z实=Z软-高度差,因此调整机器人Z方向的高度,如图7所示。根据模拟仿真的图形进行机器人运行写字,并提交实验报告。
3.2 教学实行效果
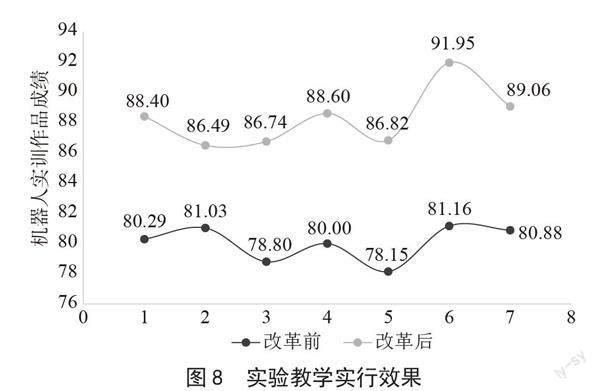
实行“设计—仿真—运行”的实验教学模式后,学生涉及的知识面更广、兴趣度更高、创新性更强。从简单的文字到学校的校徽、学生喜欢的动漫图形、Logo、标志性建筑等都可通过此教学模式实现。学生兴趣度提高最直观的显现在作品成绩上,如图8所示。
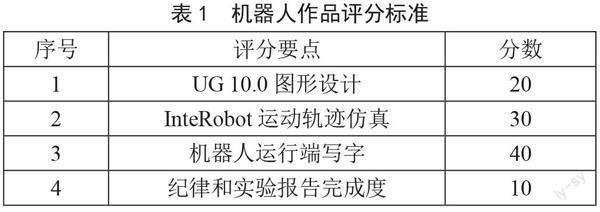
在规定的评分标准(表1)内,离线编程机器人写字实验的学生平均成绩提高8%,证明了“设计—仿真—运行”的实验教学模式的可行性。
4 结 论
文中提出基于InteRobot离线编程的机器人写字实验教学设计,采用“设计—仿真—运行”的模式开展教学。学生以团队形式合作,在PC端学习操作InteRobot,导入UG 10.0图形后模拟仿真运动轨迹,输出PRG格式的控制代码和Inc工程文件。机器人运行端为HSR-620 6自由度工业机器人,在基坐标下调整好Z轴高度差,配合自制的装载软毛笔3D打印模型,进行X、Y轴的轨迹运动。此种教学模式有利于学生的团队合作和对作品的精益求精,也有利于提高学生的兴趣度、创新思维能力和动手操作能力,且学生的作品平均成绩在同样的评分标准内提高8%。
参考文献:
[1] 《“十四五”机器人产业发展规划》解读 [J].自动化博览,2022,39(3):14-15.
[2] 十五部门联合印发《“十四五”机器人产业发展规划》 [J].机器人技术与应用,2022(1):1.
[3] 仝敏.《工业机器人编程实训》课程思政研究与实践 [J].中国设备工程,2021(15):232.
[4] 何燕妮,陈永平.“工业机器人操作与编程实训”课程思政实施路径研究 [J].科教文汇:中旬刊,2020(32):96-98.
[5] 逯云杰.工业机器人课程的体系设计分析 [J].集成电路应用,2022,39(6):49-51.
[6] 赵祥,薛誓颖.“工业机器人编程及应用”课程教改研究 [J].机电技术,2022(2):118-120.
[7] 赵祥,薛誓颖.“工业机器人编程及应用”课程教改研究 [J].机电技术,2022(2):118-120.
[8] 黄灿英,杨墉金,张永红.“互联网+”时代下混合式教学模式在“工业机器人离线编程”教学改革中的应用探索 [J].教师,2022(27):87-89.
[9] 沈晔超,葛勇.“1+X”证书制度背景下“工业机器人应用编程”课程教学改革与实践 [J].南方农机,2022,53(20):186-188.
[10] 蔡丽娟,蔡佳丽,杨谋,等.基于“金课”背景下的《工业机器人离线编程与仿真》课程改革 [J].电脑知识与技术,2021,17(26):204-205.
[11] 张雨.“导-学-控-评”教学模式在中职工业机器人操作与编程课程中的研究与实践 [D].长春:长春师范大学,2022.
[12] 赵明岩,蒋昕余,陈垣融,等.基于视觉的水果雕花机器人创新实验设计 [J].实验室研究与探索,2019,38(6):71-74.
[13] 李向林.基于InteRobot软件的工业机器人的仿真介绍 [J].科技风,2018(22):256.
[14] 卢青,郭建国.“新工科”背景下的机器人轨迹规划实验教学系统设计 [J].实验室研究与探索,2022,41(5):147-150+201.
[15] 赵明岩,蒋昕余,陈垣融,等.基于視觉的水果雕花机器人创新实验设计 [J].实验室研究与探索,2019,38(6):71-74.
[16] 潘懿.《工业机器人离线编程与仿真》课程信息化教学探讨 [J].武汉船舶职业技术学院学报,2021,20(1):57-60.
[17] 王海涛.工业机器人离线编程与仿真课程的教学设计 [J].集成电路应用,2022,39(7):130-131.
[18] 程发洲.基于UG10.0的基本参数与非切削参数设定 [J].东莞理工学院学报,2019,26(1):96-100.
[19] 刘曼,朱龙飞,卢青.基于Matlab的并联机器人运动控制仿真与分析 [J].林业机械与木工设备,2021,49(1):22-25+29.
[20] 王玲玲,姜丽娜,富立,等.能力达成导向的机器人虚拟仿真课程教学设计与实践 [J].高等工程教育研究,2022(5):57-61+67.
[21] 刘邦雄,吴靖雯,赖伟洪.3D打印技术在“机械原理”课程实践教学中的应用 [J].南方农机,2021,52(15):185-186.
[22] 陈志浩,黄仲佳,刘桐.“增材制造技术”案例教学及案例库建设探讨 [J].通化师范学院学报,2022,43(10):93-98.
[23] 武永强,于涛,车恒恒.工业机器人写字工作站的研究 [J].机械工程与自动化,2021(5):28-30.
作者简介:金花雪(1991—),女,朝鲜族,吉林龙井人,助理实验师,硕士,研究方向:机器人控制、智能制造技术;朱来发(1977—),男,汉族,湖南双峰人,副高,硕士,研究方向:智能控制与制造;张善勤(1994—),男,汉族,福建福州人,助理实验师,本科,研究方向:装备制造及工艺分析;薛祎鹏(1993—),男,汉族,福建莆田人,助理实验师,本科,研究方向:材料成型及其控制工程。
收稿日期:2023-03-14
基金项目:国家自然科学项目(52275530);福建省自然科学项目(2020J01068);校级实验教学与管理改革课题(SY2023J04)
猜你喜欢
防爆电机(2021年4期)2021-07-28
中国特种设备安全(2021年11期)2021-05-05
少先队活动(2021年2期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
铁道通信信号(2020年6期)2020-09-21
学生天地(2020年17期)2020-08-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
数学大王·低年级(2020年3期)2020-03-12
现代装饰(2018年5期)2018-05-26