一种测量设备的便携式动态标校方法
2023-02-28 05:46陈庆良宫福红梁建兴郭云峰
测控技术 2023年2期
陈庆良, 宫福红, 梁建兴, 郭云峰
(1.中国人民解放军63895部队,河南 焦作 454750; 2.中国人民解放军63893部队,河南 洛阳 471003)
测量雷达在试验中提供飞行目标的真值数据,作为评估和鉴定其他设备的标准和依据,其精度是最为重要的性能指标。很多精度测量任务在自然、地理和气候等环境差异较大的条件下开展,测量雷达需要远距离机动,环境改变以后,其整体性能必然受影响,在执行任务前进行精度校准是必不可少的一环。精度标校分静态和动态两种,静态标校需要利用雷达周围事先搭建的方位标、距离标、校准望远镜和水平仪等设施和仪器,这种常规标校只能修正部分系统误差,距离零值和俯仰零值等系统误差的修正效果容易受阵地周围地形和地物的影响,易造成雷达部分系统误差超差[1],显然这种方法在野外条件下不可取。雷达到达任务区域,从开展作业到形成作业能力的时间间隔很短,对时效性要求较高。为适应遂行赴外任务实际需求,利用现有条件,改进标校手段,优化组织程序,研究探索一种适合野外条件下使用的快速、精准、便捷的标校方法十分重要。
目前,国内外针对各种测量设备的动态标校方法有很多,涉及技术革新、算法改进、模型优化和数据处理等方面,利用机载GNSS设备进行导航、校飞和导弹外弹道测试试验等应用也很普遍,国内利用机载GNSS设备检验雷达精度已经形成一套比较完备的方法,也有一些应用案例[1-6]。在现有案例中,对比赴野外环境中作业且缺少技术手段依托的测量雷达的动态标校需求,主要存在4个方面的不足:① 操作性不强,程序烦琐,耗时长,不能依靠有限的人员和装备力量实施标校;② 便捷性不强,使用的升空平台多为载人飞机、中小型无人机、直升机,组织实施复杂,不能随测量雷达一起携行机动;③ 安全性不强,飞行平台体积大、速度快,可控性不足;④ 经济性不强,综合成本高。针对上述问题,本文通过旋翼无人机挂载GPS/BDS接收机作为动态飞行目标和目标真值的获取手段,利用实时动态载波相位差分技术(Real-Time Kinematic,RTK),能够实时输出定位结果,不需要事后差分运算;双系统工作时接收的卫星数更多、可靠性更高;可以任意设置基准站,对外部条件要求低,适合在条件比较有限的野外陌生环境下工作。旋翼无人机具有结构简单、携带方便、操作性好和安全性高、技术成熟和成本较低的优势。该方法能够同时解决为测量雷达提供动态目标和获取飞行目标高精度坐标值这两个精度评估的关键问题,可以为测量雷达在野外开展作业前和日常维护时进行精度标校提供一种有效方法,也可以为其他类型测量设备的动态标校提供参考。
1 动态标校方法及实现
标校的一般方法可以概括为:对于给定的目标,被标校雷达测量后且经过常规修正的数据与标准设备测量的数据在时间对齐后,差值的算术平均数就是被标校雷达的系统误差,再分别对雷达测距零值和测角零值进行修正,就完成了雷达校准[7-9]。
1.1 基本思路
参考相关文献,结合野外保障特点,本文采取的动态标校方法为:用小型民用旋翼无人机作为标校的动态移动载体,搭载GNSS移动站按预定航路飞行。被标校雷达实时跟踪测量旋翼无人机,GNSS地面基准站通过电台向移动站发送差分信息,移动站通过RTK技术实时精确测量旋翼无人机的位置信息,飞行测试结束后,把RTK真值数据转换到雷达站心球坐标系下,与雷达数据时间对齐后,求出两者一次差数据,运用数学统计方法解算出标校雷达的测量精度误差,调整雷达零始状态,实现标校目的[10-12]。动态标校过程如图1所示。

图1 动态标校过程
1.2 硬件实现
1.2.1 硬件组成
硬件设备主要包括旋翼无人机系统和GNSS测量系统,可分为地面和机载2个部分。地面设置基准站,移动站挂载在旋翼无人机上,移动站工作时同时设置RTK模式和事后载波相位差分模式,便于两者进行数据比对,移动站接收机输出的定位数据直接存储在移动站上。当然,也可以将定位数据通过数传电台下传,实现实时误差评估。基准站和移动站的硬件设备基本相同,主要由接收机及天线、数传电台及天线、数据记录仪等组成。移动站由无人机的动力电池供电,基准站由电池供电,还可以采用220 V市电供电。旋翼无人机作为雷达跟踪的目标,搭载移动站,提供目标的高精度坐标数据,操作人员在地面上利用飞行监视控制系统监视无人机状态、控制无人机飞行。核心硬件组成如图2所示。

图2 核心硬件组成
1.2.2 硬件选型及集成
接收机用于获取旋翼无人机的高精度动态坐标数据和基准站数据,选型时主要考虑的要求有精度高、功耗低和质量轻,能够提供mm级载波相位观测值和cm级RTK定位精度,能够同时支持GPS和北斗双系统,市面上可选产品比较多。数传电台用于RTK基准站向移动站传输卫星观测数据,数传电台信号在传输过程中会有衰减,实际作用距离要小于标称作用距离,选型时要提高指标要求,数传电台选型主要考虑数据率、作用距离、功耗和质量等因素。数据记录仪用于存储接收机输出的数据信息,选型主要考虑接口、数据接收和存储能力、质量、供电等因素。旋翼无人机用于搭载移动站,并作为雷达跟踪的目标,选型主要考虑有效载荷、续航时间、飞行高度、飞行速度、遥控距离、操控性能和飞行安全性等因素。
硬件设备选型完成后,便可以根据硬件设备的工作流程、连接关系和信号流程对硬件设备进行集成。硬件集成实物如图3所示。

图3 硬件集成实物图
各仪器集成到旋翼无人机上时,装机结构需要考虑以下要求:① 移动站的安装不能影响无人机的飞行性能和操控性能,各搭载仪器的布局要合理,要确保在飞行过程中不能形成明显的阻力;总体质量分布要均匀,不能形成明显的重心偏心力矩;不能影响无人机和地面之间遥控信号的传输;不能遮挡RTK移动站接收机天线,确保能正常接收卫星信号。② 接收机天线安装在无人机机架中心的正上方,避免天线受到其他设备遮挡;接收机、数传电台及天线、数据记录仪均安装在无人机机架下方,避免形成明显的偏心力矩,同时,有利于无人机飞行时数传电台天线接收基准站数传电台信号。③ 尽可能降低无人机负载的总体质量,因为动力电池容量有限,负载越少,无人机的续航时间越长。④ 要考虑尽量增强RTK移动站接收机天线位置对雷达电磁波的反射特性,因为移动站输出的坐标数据反映的是接收机天线相位中心的位置,雷达跟踪无人机时跟踪位置应尽量接近接收机天线,尽量减少接收机和雷达测量的部位不一致造成的数据偏差影响。⑤ 因为无人机机身材料大部分是塑料和碳纤维,为增大雷达散射截面积(Radar Cross Section,RCS),考虑在移动站的接收机航空天线下面加装一个用锡箔纸制作的环形角反射器,其结构由8个两面直角反射器和上下两个圆形底板组成,两面角的高和圆形底板直径设置为20 cm,大小可视情调整。环形角反射器的结构俯视图如图4所示。

图4 环形角反射器的结构俯视图
1.3 软件实现
软件部分用于比对分析飞行数据,主要包括数据提取、坐标转换、时间对齐、野点剔除、数据比对、图形显示等功能,也可以根据实际需求拓展其他功能,例如实时误差统计分析等。限于篇幅,本文仅简要介绍用到的数学知识点。
RTK测得的坐标数据属于WGS-84大地坐标系,必须转换为以标校雷达为原点的球坐标才能进行比对,涉及的坐标系有大地地心坐标系、空间大地直角坐标系、雷达站心直角坐标系和雷达站心球坐标系[13],用到的公式可查阅相关资料。各坐标系之间转换关系示意图如图5所示。

图5 各坐标系之间转换关系示意图
数据处理过程中一个很重要的环节是将两套设备测量数据的时间对齐,不同体系的测量设备的数据率不一样,常见数据率有20 Hz、4 Hz、1 Hz等,为了抽样方便,可以取整数时刻的数据进行比对。设DR为雷达的测量数据,DG为经过坐标转换以后在雷达站心球坐标系下的GNSS测量数据,则计算误差又称一次差为[1]
(1)
式中:i为数据区段号;j为第i区段的数据采样号,且j≥200;σ为雷达的标准差;误差为
(2)
(3)
式中:ΔDi为第i区段数据的误差统计;ΔD为总误差;Si为第i区段数据的系统误差统计;S为系统误差。
在标校飞行过程中,如果将RTK数据实时下传至数据处理终端计算机,通过软件同步处理,可以实现对测量雷达的实时动态精度评估。
在最高人民法院编纂的《刑事审判参考》共有37个案例具体涉及黑社会性质组织的认定,其中又有5例涉及到关联性企业的财产认定,从这些判决中可以提取到司法对于认定关联性企业财产的标准的观点如下:
1.4 无人机飞行航线设计
由于旋翼无人机相对雷达来说飞行距离近、高度低、速度慢,而雷达的跟踪角速度较快,在旋翼无人机飞行的某些位置,雷达数据的误差就会增大,需要对旋翼无人机的飞行高度和雷达跟踪的俯仰角进行限定,如图6所示。
已知雷达最小跟踪距离为R0、雷达保精度跟踪仰角为E0、旋翼无人机最大升限高度为H0。设雷达与无人机水平距离为L,为确保雷达测量值有效,则无人机飞行高度H、雷达跟踪俯仰角E应该满足:

图6 旋翼无人机有效飞行高度示意图
当L≤R0cosE0时,
(4)
当L>R0cosE0时,
(5)
根据旋翼无人机的性能特点和雷达标校需求,主要设计垂直飞行、切向飞行、径向飞行、定点悬停4种飞行航线,如图7所示。

图7 4种典型航线示意图
这4种航线的特点和用途如下。
① 垂直飞行。无人机在起飞和降落时,采用垂直爬升和垂直降落的飞行航线,该航线下,无人机所处方位角基本不变,只有高度和仰角产生变化,主要用于重点检验雷达方位角精度。
② 切向飞行。无人机相对雷达做切向飞行,该航线下,无人机所处仰角变化相对缓慢,方位角变化相对较快,主要用于重点检验雷达俯仰角精度。
③ 径向飞行。无人机相对雷达做径向飞行,该航线下,无人机所处方位角基本不变,由于航线长度较短,仰角的变化相对缓慢,主要用于同时检验雷达方位角和仰角精度。
④ 定点悬停。无人机相对雷达做悬停动作,无人机所处方位角、俯仰角和距离基本不变,主要用于重点检验雷达方位角和仰角精度。
1.5 标校组织实施
对精测雷达进行动态标校时,总的操作过程、工作流程和各设备的统筹关系如图8所示。主要流程包括:① 分别设置RTK基准站和移动站所属接收机、数传电台和数据记录仪的参数;② 在旋翼无人机上加装移动站;③ 在已知点位架设基准站;④ RTK系统开机工作并录取定位数据,旋翼无人机起飞并按照航线飞行;⑤ 雷达跟踪无人机并录取跟踪数据;⑥ 将RTK定位数据转换至雷达球坐标系下并作为比对标准,在时间对齐后求出两者一次差;⑦ 使用“3σ”准则排除异常误差值[14],提取评估数据样本;⑧ 根据数据比对结果,分析精测雷达误差数据,给出雷达精度评估结果;⑨ 根据雷达精度评估情况调整雷达零值。

图8 动态标校的组织流程
2 实测验证与优化
2.1 RTK与载波相位差分比对
以同一台接收机、相同时间段的载波相位差分数据作为比对标准,对RTK系统的动态定位精度进行检验性实测,测试的具体方法步骤参见1.5节,不同之处在于雷达不需要开机,比较的数据为RTK模式和事后载波相位差分的数据,基线长在1 km以内。测试结束后,将两者的数据转换到空间大地直角坐标系下,即将移动站RTK模式下的X、Y、Z数值与移动站事后载波相位差分模式下的X、Y、Z值进行比对,统计得出X、Y、Z的精度(RMS)。RTK数据与事后差分数据在大地直角坐标系下的偏差分布图如图9所示。
由图9可以看出,RTK模式下动态定位精度波动很小,测试结果为:平面0.031 m,高程0.011 m,取RTK最大误差0.031 m、基线长1 km,则可以算出其测角精度为0.031 mrad。由此可知,短基线条件下,其测距精度、测角精度远大于被标校雷达精度。所以,在短基线内完全可以用RTK模式来标校精测雷达。
2.2 RTK与雷达数据比对
按照1.5节的组织流程进行飞行标校测量,飞行地点与被标校雷达的距离略大于雷达最小跟踪距离,地域开阔无遮挡,RTK的基线长在1 km以内,将RTK模式的测量数据转换到雷达站心球坐标系下与雷达数据比对,两者的一次差比对如图10所示。
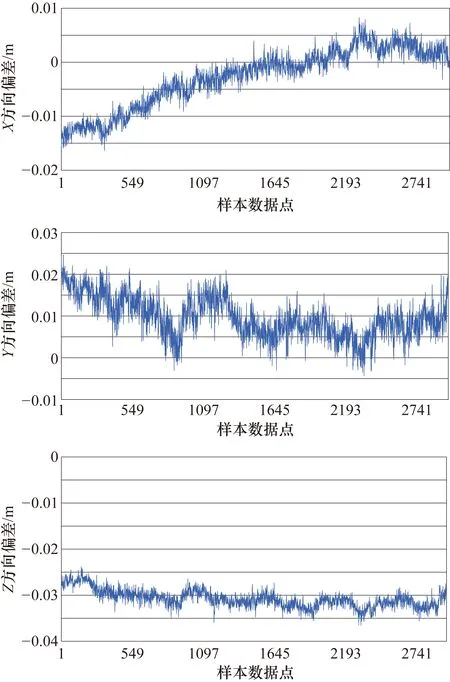
图9 RTK数据与事后差分数据在大地直角坐标系下的偏差分布图
雷达在某些点明显存在超差,这是因为旋翼无人机距雷达较近、飞行角度较低。按照“3σ”准则,取雷达的测距、测角标准差,分别剔除测距、方位、俯仰不满足要求的数据,然后取三者重叠的部分参与标校误差统计。
满足标校误差统计要求的数据如图11所示。细线是飞行航迹,粗线为满足“3σ”准则的数据在航迹上的对应位置,测距数据在全航线的大部分时间均满足要求,方位角、俯仰角数据在切向、径向、垂向飞行和定点悬停时均有满足要求的分布。从图11(d)可以看出,有5个区段的数据同时满足要求。表1为有效区段数据误差统计结果。由此可计算出雷达距离、方位角、俯仰角最终的测量误差分别为0.868 m、0.118 mrad、0.11 mrad。

表1 有效区段数据误差统计结果

图10 雷达数据与RTK数据一次差比对图
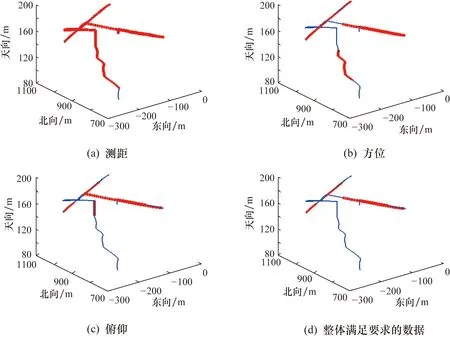
图11 满足标校误差统计要求的数据
3 结束语
从实际运用情况来看,该方法的突出优点体现在4个方面:① 操控性好,3~4人就可以组织实施,1 h内便可以完成一次标校;② 便携性好,整套设备的硬件质量在20 kg左右,携带运输方便,能在任意地形地貌环境中作业;③ 安全性好,旋翼无人机具有体积小、质量轻、速度慢等特点,操作使用过程非常安全;④ 经济性好,整套设备费用较低,平时维护简单,充满电就可以重复使用。
当然,旋翼无人机存在体积小、飞行高度低、飞行距离近、飞行速度慢和续航时间短等不足,动态标校方法不能为精测雷达提供一个远距离、高动态的飞行靶标,也就不能全面检验精测雷达的跟踪精度,尤其是远距离的跟踪测量精度。但是,精测雷达一般只有在研制出厂或者大修以后才需要使用大型飞机进行动态标校来评估整体的测量精度,平时只需做一些近程的静态标校。所以,这种方法作为一种对近程静态标校的补偿和替代手段已经能够很好地满足实际工作需要。此外,旋翼无人机具有结构简单、携带方便、操控性好、安全性高等优势,而且这种方法精度高、耗时短,非常适合遂行雷达执行野外测量任务时位置变更以后的精度评估,还能够直接用于精测雷达日常使用过程中的精度评估工作。所提出的动态校准方法为其他类型的测量设备的动态标校提供了参考。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
科学技术创新(2021年11期)2021-05-25
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2019年7期)2019-04-25
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2016年8期)2016-11-16
电子制作(2016年1期)2016-11-07