基于LC谐振的柔性无源无线压力传感器系统设计
2023-02-27 02:47:52闫金礼聂宝清陈新建
仪表技术与传感器 2023年1期
闫金礼,聂宝清,刘 杰,陈新建
(苏州大学电子信息学院,江苏苏州 215006)
0 引言
近些年来,柔性传感器在各领域不断发展,科研人员的研究朝着高柔性[1]、高灵敏度[2]、集成化[3]、微型化[4]等方向不断深入。其中,柔性无线传感器系统高度集成了信息传感[5]、数据采集[6]、处理分析和无线传输[7]等功能,可灵活应用于多种场合,备受科研人员的关注[8]。而无线柔性压力传感器由于其在触觉感知和健康监测等方面的广泛应用逐渐走进人们的生活[9]。
在运用无线压力传感器系统的柔性可穿戴设备中,基于LC谐振的方法由于不需要复杂的电路设计,并且可以无源使用等优点[10-11],常被用在足底压力检测[12]、眼压监测[13]和其他一些需要无创监测的特殊应用场景中。但是,它们通常需要网络分析仪等大型实验设备获取谐振频率的变化以评估外界压力值的变化,这种方法不能实时地处理与显示数据,限制了LC传感器的应用场景[14]。为此,本文提出了一种基于电磁感应耦合原理的柔性无线传感器系统,用于无源无线柔性压力检测。该系统由无线压力传感器、信号读取电路和数据接收上位机组成,可以实时、准确地进行数据测量和活动监测。例如,感知手臂的弯曲幅度和步伐的频率快慢。
1 传感器的结构与系统传感原理
1.1 传感器结构与制备方法
本文提出的无线压力传感器具有3层结构,如图1所示。顶部的LC天线由2层平面螺旋电感线圈叠放构成。2个线圈的自感与互感决定了天线的电感值。同时,它们之间的寄生电容和线圈缝隙里的寄生电容共同组成了LC结构的等效电容。传感器的中间层是一层弹性织物材料,它具有极高的柔性和回弹性。传感器的底层是具有超高磁导率和辐射吸收性的铁氧体膜。

图1 无线柔性压力传感器结构
首先使用AutoCAD软件绘制双层平面螺旋电感的线圈,绘制好模型后,使用标准丝网印刷和蚀刻技术对聚酰亚胺膜(25 μm)的两侧进行图案化处理,并且在两侧覆上结构相同的电感线圈(12 μm),最后对预留通孔灌铜以连接两侧线圈相关端口,得到LC天线。使用准备好的双面胶(50 μm)将LC天线、织物和铁氧体膜进行粘连,即完成了柔性压力传感器的制备,最终制备的传感器长25 mm,宽10 mm,厚2.1 mm。本传感器制作简单,易于大批量生产。
1.2 系统传感原理
传感器系统的简易等效电路如图2所示,电路工作频率设置为13.56 MHz,在Vout处对信号进行检波处理以得到系统最终的输出电压。

图2 传感系统等效电路
根据图2,可以求得读出端等效输入阻抗Zread:
(1)
式中:Lread和Ltag分别为两端电路线圈电感;Rread和Rtag分别为两端线圈内阻;Ctag为传感器标签端的等效电容;M为两线圈之间的互感;f为系统的工作频率。
两线圈的互感M又可以表示为
(2)
式中k为耦合系数,表示两线圈间耦合的松紧程度。
传感器的品质因数Qt和谐振频率ft分别为
(3)
(4)
由式(1)~式(4),重新计算得到Zread:
(5)
显然,Vout处电压与Zread相关,根据式(5),在本系统中,Rread和Lread为定值,f设定为13.56 MHz。所以影响Vout处电压最重要的变量就是k、Qt和ft。
从理论上讲,耦合系数k取决于线圈的几何形状、间距和相对位置[15],且传感器在受压范围内具备高达约29的品质因数。当保证接收线圈和传感器的检测距离一定时,外界施加压力会使织物产生机械形变,铁氧体膜和天线之间的距离减小,传感器上的磁场发生变化,导致传感器谐振频率ft发生变化。如图3所示,传感器初始的谐振频率为12.7 MHz,当受到15 kPa压力时,谐振频率偏移到约为12.3 MHz[16]。最终,硬件采集电路将谐振频率的偏移转换成连续变化的电压信号。

图3 传感器受压时谐振频率偏移
2 硬件电路与上位机软件设计
2.1 信号读取电路设计
传感器信号读取电路系统框图如图4所示,主要由电源、稳压器模块、振荡器模块、匹配模块、检波模块和控制模块组成。稳压器将电源提供的电压分别稳压到3.3 V和5 V,3.3 V供给控制模块和蓝牙,5 V供给振荡器模块。振荡器模块工作产生13.56 MHz频率的方波,通过LC滤波电路将高次谐波滤除,最后生成13.56 MHz的正弦波。匹配模块用来提高电路的传输效率。检波模块将电磁感应耦合后电路输出的信号转化为直流电压信号。
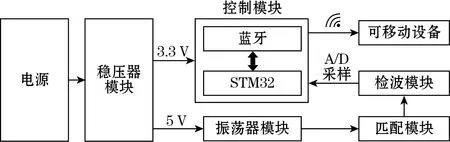
图4 传感器信号读取电路结构
接着使用控制器(STM32F103C8T6)内置的模数转换器对得到的直流信号进行数据采集,并将采集的信号做相关编码处理,使得其通过蓝牙无线传输到数据接收上位机进行数据的实时显示。
2.2 上位机软件设计
为了能够实时地显示电路采集的数据,本文设计了一款基于蓝牙串口通信技术的上位机软件。软件界面如图5所示。该上位机软件使用C#语言开发,主体包括数据输入通道配置、数据接收与保存、监测开关控制和数据波形可视化显示4个功能窗口,实现的主要功能如下:

图5 上位机软件界面
(1)基于蓝牙技术建立传感器系统和接收设备的通信。将信号读取电路最终转化得到的电压数据实时打印输出,并绘制连续的波形信号以可视化显示。
(2)传感器系统自定义启动设置。用户可以根据不同的应用场景,个性化设定传感器系统的工作时间。软件会最终输出在这段时间内被监测部位的活动次数。
系统数据处理流程如图6所示,开启硬件电源开关后,在软件选择对应监测的串口号,并进行参数配置。当接收的数据检验正确时,软件将其打印在屏幕上显示。通过选择,用户可以实现实时波形绘制和定时监测等功能。接收到结束信号后,关闭硬件电源,系统停止工作。
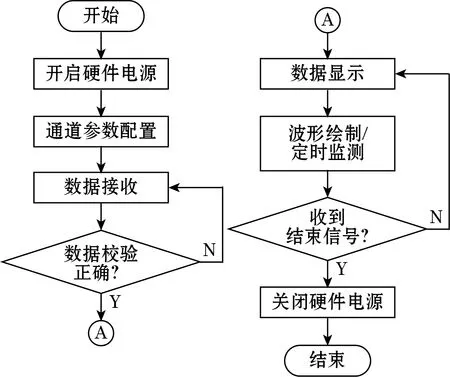
图6 系统数据处理流程
3 实验验证
3.1 性能实验
最终设计并制备的无源无线压力传感器和信号读取电路如图7所示,图中包括3个无线压力传感器标签、1个信号读取电路和1个接收线圈。
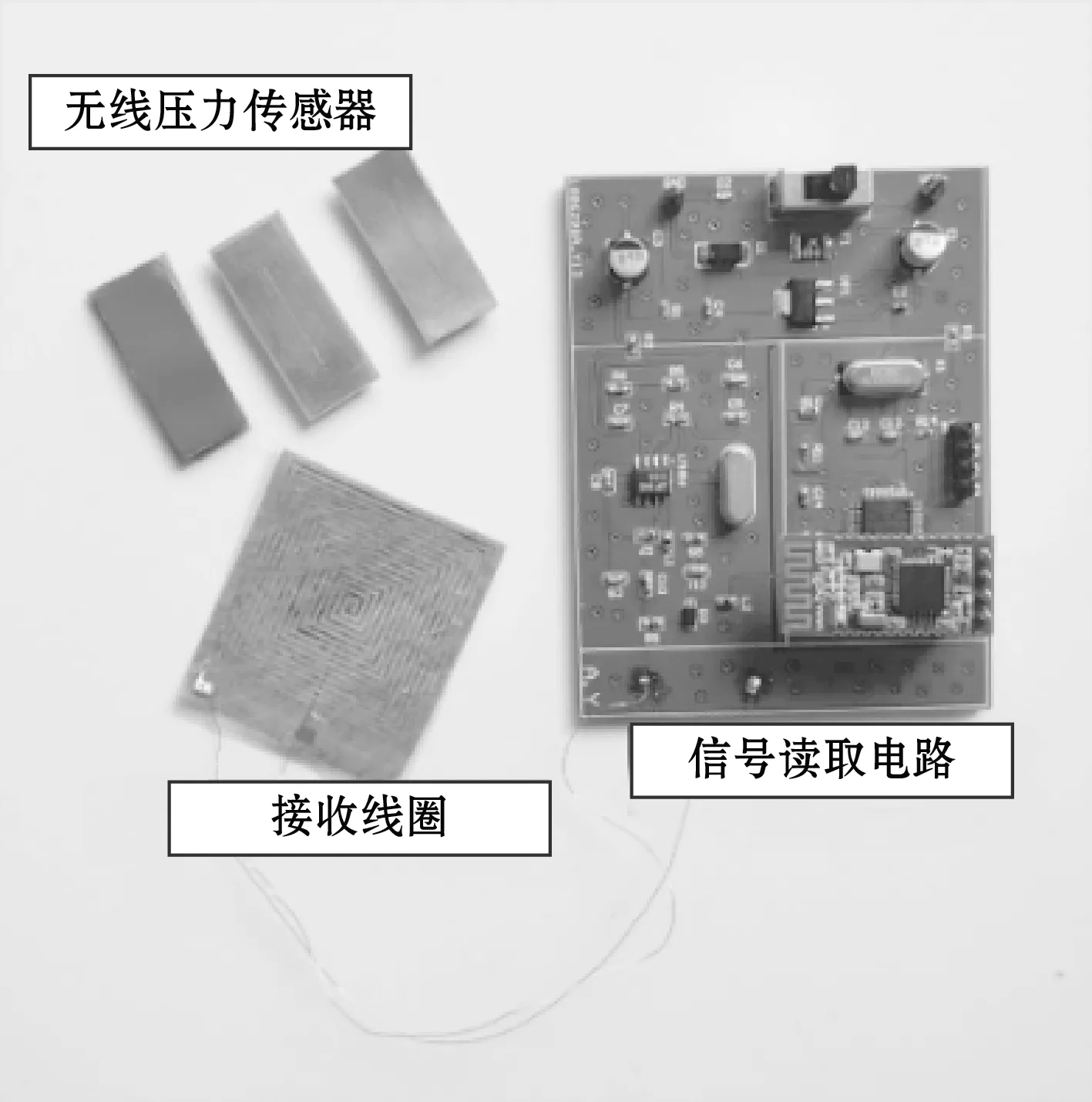
图7 传感器与信号读取电路实物
将无线压力传感器标签与信号读取电路的接收线圈间隔2 mm进行传感器灵敏度测量实验,系统测量装置如图8所示。通过控制线性位移平台和测力计的位移给无线压力传感器施加机械负载,测力计示数为传感器受到的压力值。信号读取电路将最终转化得到的电压值通过蓝牙传输给上位机系统显示并记录。
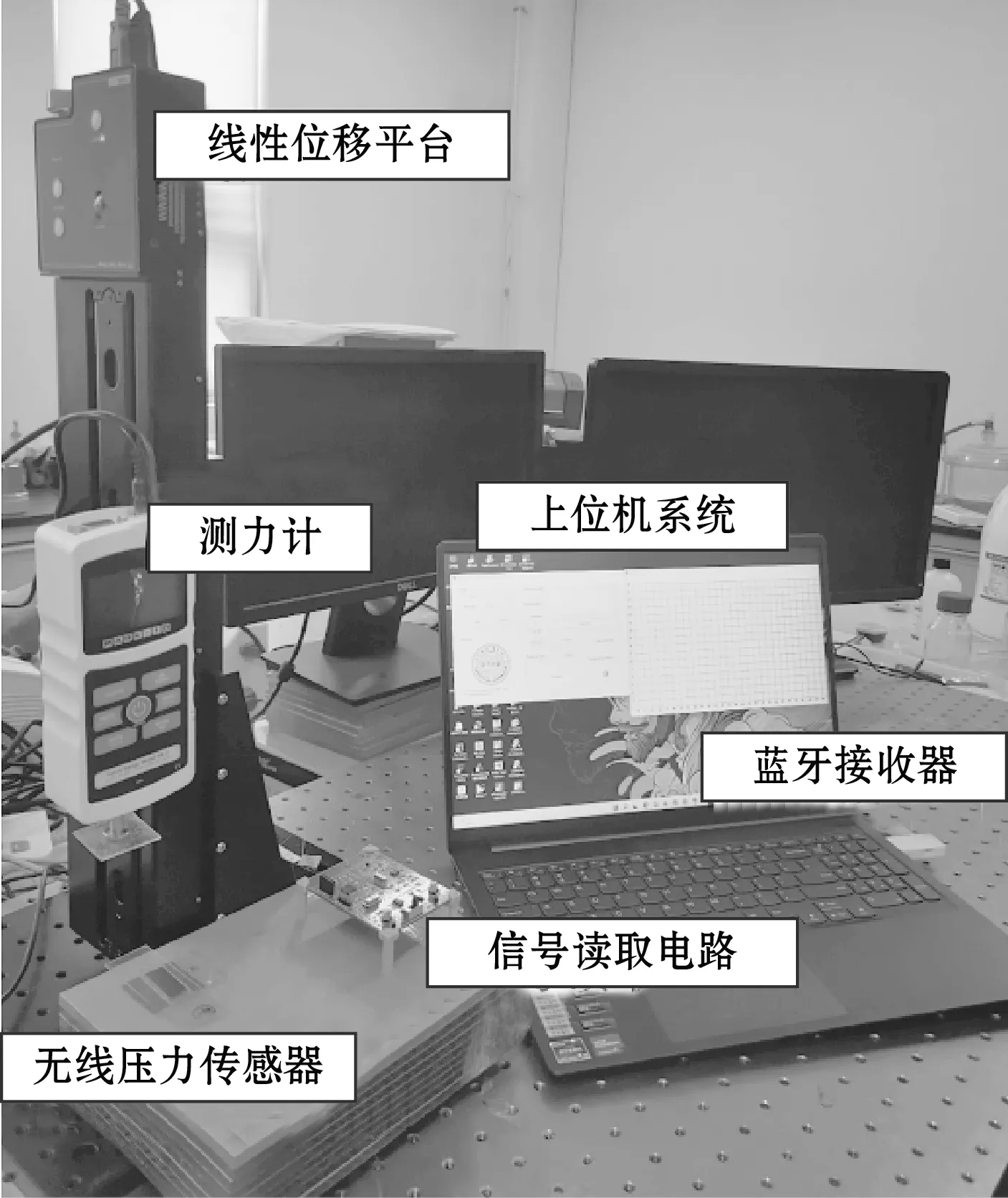
图8 传感器系统测量装置
传感器系统的灵敏度S定义为
(6)
式中:V0为传感器系统的初始输出电压;ΔV为输出电压的增量;p为传感器受到的压强,定义为传感器所受压力与受力面积之比。
图9为传感器的压强-电压曲线。从图9可知,在15 kPa之前,传感器的灵敏度为1.97×10-2kPa-1,在15 kPa之后,灵敏度下降到2.3×10-3kPa-1,这主要是由于中间层的机械特性决定的。当外界压强达到15 kPa时,由于位于中间层的织物被压缩到一定程度,杨氏模量增大,由低抗压状态转换成高抗压状态。
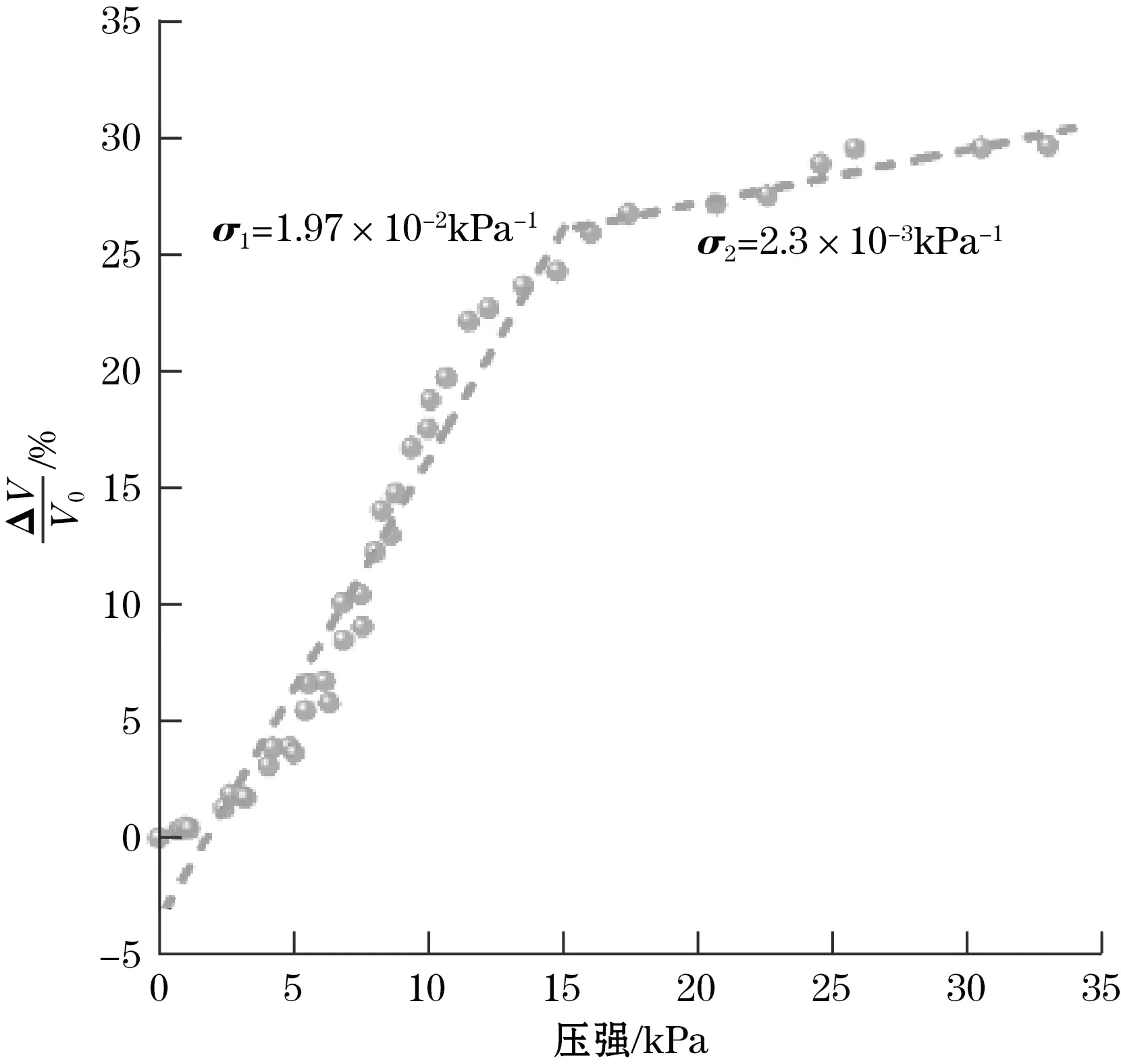
图9 传感器灵敏度曲线
为了进一步验证传感器的性能,使用水笔作为对传感器的施力工具进行实验[17]。如图10所示,首先使用笔尖连续对传感器进行5次重力按压,并快速释放,接着连续对传感器进行2次长时间施力,最后连续对传感器进行6次轻力按压,并快速释放。传感器都产生了预期的响应,且表现出良好的稳定性。
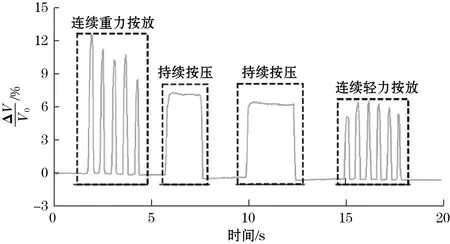
图10 使用笔尖对传感器施力的系统输出
3.2 实用场景验证
本文将传感器系统用于人体活动监测实验,以验证传感器系统在实际应用中的表现。首先将传感器系统用于肘部运动的监测。将传感器使用绑带固定在肘部关节处,由于手肘弯曲时产生的力会使绑带产生弹性形变,进而对传感器标签产生压力。如图11所示,当大臂和小臂的夹角变小时(如180°、135°和90°),传感器标签受到来自绑带的压力增加,导致输出的电压变大。这展现了传感器系统在判断人体不同姿势上的应用前景。
所提出的传感器系统还可以监测使用者的步伐频率。志愿者将传感器系统穿戴于腿部,首先以正常速度行走,接着慢跑,随后再以正常速度行走,整个监测过程持续约16 s,最后得到系统输出电压波形如图12所示。借助传感器系统,可以计算出走路和慢跑时的步频,分别约为40步/min和86步/min。
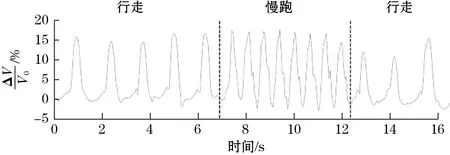
图12 步伐频率不同时的系统输出波形
4 结束语
本文基于LC无源传感方案设计了可以实时、快速进行测量的无线压力传感器系统,包括具有3层结构的柔性无线压力传感器、信号读取电路和数据接收上位机。传感器结构简单,成本低廉,易于大规模制备。且与信号读取电路配合使用下,在0~15 kPa的压力区间内呈现可达1.97×10-2kPa-1的高灵敏度。在人体生理活动监测上的实验证明:提出的传感器系统性能良好,可以实时、稳定地进行人体运动的监测。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
大电机技术(2022年4期)2022-08-30 01:38:30
石油沥青(2021年5期)2021-12-02 03:21:18
中国特种设备安全(2021年5期)2021-11-06 05:09:26
文化创新比较研究(2020年7期)2021-01-13 09:10:48
成都信息工程大学学报(2020年5期)2020-07-29 08:50:12
模具制造(2019年7期)2019-09-25 07:29:58
西南交通大学学报(2016年3期)2016-06-15 20:29:35
通信电源技术(2016年4期)2016-04-04 02:57:38
汽车维护与修理(2015年6期)2015-02-28 12:17:05