新手驾驶人疲劳状态下的视觉特性研究
2023-02-27 07:27赵小平闵忠兵薛运强莫振龙张姝玮
重庆理工大学学报(自然科学) 2023年1期
赵小平,闵忠兵,薛运强,莫振龙,张姝玮,龚 俊,喻 佳
(华东交通大学 交通运输工程学院, 南昌 330013)
0 引言
据公安部交管局统计,我国2019年交通事故总计247 646起,同比增长1.1%[1]。据统计分析,在交通事故成因分析中,驾驶人因素占到70.8%,其中驾驶感知错误率占比48.1%,判断错误率占比36.0%,操作反应错误率占比7.9%[2],然而疲劳驾驶是导致驾驶人感知、判断、操作能力减弱的重要原因[3]。
疲劳会使大脑反应变得迟钝,且会带来视觉、驾驶行为变化,如眨眼频率增加、点头、打哈欠等,车道维持能力也会受到影响。主观检测法和客观检测法是当下检测驾驶疲劳的2种主流方法[4]。主观检测方法主要通过驾驶员自我记录表、主观调查表、皮尔逊疲劳量表和斯坦福睡眠尺度表等评定[5]。客观检测方法主要包括3种检测方法:① 基于生理信号,即根据脑组织和肌肉组织的氧水平来判断疲劳[6];② 基于车辆行为,即监测方向盘角度、车道位置、速度、加速度、制动的变化来预测驾驶员疲劳[7];③ 基于驾驶人面部特征的疲劳检测方法,它会监测面部表情,以判断驾驶人的疲劳状态,因为当驾驶人疲劳时,打哈欠和眨眼的频率会增加[8]。
总结国内外疲劳驾驶研究发现,我国研究重点对象主要是具有一定驾驶经验的驾驶人,而针对新手驾驶人相关的研究较少,且用于表征疲劳的参数多为瞬时变量,而疲劳是一个循序渐进的过程,对于时间窗内的参数选择较少;且疲劳驾驶识别模型较为单一。鉴于此,本文拟通过对驾驶人的疲劳状态进行系统分析,并通过5 min时间窗划分,提取出能表征新手驾驶人疲劳状态的视觉参数,与前人研究进行对比分析,进一步利用支持向量机模型,验证指标的可靠性,并针对支持向量机(SVM)惩罚函数和径向基函数宽度参数g值对SVM分类结果的影响这一缺点,使用灰狼算法(GWO)进行全局寻优,得到最佳的惩罚参数及径向基函数宽度参数,构建了基于GWO-SVM新手驾驶人的疲劳检测模型,再一次验证指标的有效性。
1 实验方案
1.1 实验平台
数据采集的模拟驾驶平台,眼镜式眼动追踪系统 DikablisGlass 3(可兼容眼镜,双眼采集,眼部摄像头可调,提供兴趣区域分析,瞳孔追踪精密度0.1°,视野追踪精度 0.1°~0.3°,采样频率60 Hz),如图1所示。实验前,由协助人员帮助被试佩戴Dikablis Glasses 3.0眼镜式眼动仪,可检测水平视角为 116°,垂直视角为 60°,对角线 144°;眼部摄像头分辨率为 648*488 P。

图1 数据采集示意图
1.2 实验对象
本实验共招募20名健康被试者(视力正常或矫正视力正常,各生理指标正常),年龄在18~25岁,驾龄在0~3年,平均年龄22岁,平均驾龄2年。所有被试者生理节律均正常,无睡眠疾病,实验前后12 h不得服用刺激性药物、提神饮料等,由于4名被试者出现不适反应,最终得到16名被试的眼动数据。由于国内尚未形成对驾驶人的统一定义标准,结合我国实际情况,将驾驶里程小于4万公里或驾龄小于3年的驾驶人定义为新手驾驶人[9]。
1.3 实验设计
单一的沿途景观和机械式的操作以及长时间、长距离的驾驶等都会导致体力严重消耗,从而使驾驶人进入疲劳状态,实验内景设置为高速公路,模拟六安市部分城市快速路和城郊高速公路路段,道路设计满足《公路路线设计规范》(JTG D20—2017),道路为双向四车道,并在两侧各设置一个应急车道,仅考虑驾驶任务本身对个体的影响,进行时长120 min的模拟驾驶实验,诱发驾驶人进入疲劳状态。
具体实验流程如下:
1) 准备阶段。由协助人员介绍实验流程,并与被试人员签订实验知情同意书。
2) 适应性驾驶。协助人员对眼动仪进行标定调试,在场景中驾驶练习15 min,休息10 min后开始正式实验。
3) 正式实验。实验从14∶00开始,持续驾驶2 h,保持 80~100 km/h的车速行驶,按照日常驾驶习惯对车辆姿态进行调整。
1.4 疲劳等级评定
相关研究表明,驾驶人对其疲劳程度进行自我评价与他人根据其面部视频评价具有高度一致性[10]。为了排除驾驶人疲劳自我评价的侵入性以及个人主观差异性的影响,采取视频专家法来评定驾驶人的疲劳情况,由3名具有丰富经验的专家依据斯坦福嗜睡量表(stanford sleepiness scale, SSS),简化处理后,将疲劳状态分为 4 个等级[4],对驾驶人疲劳程度进行评定,取三者平均值为最终结果。当三者评分相差较大时,再次进行评分,直至差异较小。
协助人员记录被试者编号、SSS得分。当SSS处于1~3时,代表被试者处于清醒状态,当SSS处于4~5时,代表被试者处于轻度疲劳状态,当SSS处于6时,代表被试者处于中度疲劳状态,当SSS≥7时,代表被试者处于重度疲劳状态,具体如表1所示。
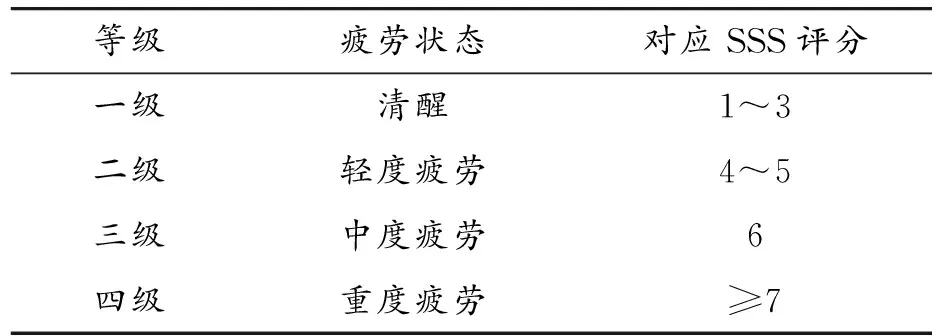
表1 疲劳评分
2 疲劳状态对视觉参数影响
2.1 视觉参数的选取
新手驾驶员在驾驶过程容易因缺乏经验感到紧张,其视觉特征表现可能有异于一般驾驶员。尽管许多学者已针对驾驶员视觉参数选择开展了相应研究,专门针对新手驾驶员的研究还相对较少。
为探究疲劳状态对新手驾驶人视觉特性的影响,选取注视、扫视、瞳孔、眨眼视觉特征参数。视觉特征指标如表 2 所示。为了尽量降低实验数据在采集、传输、记录中造成的误差,利用拉依达准则与卡尔曼滤波器对视觉数据进行预处理[11]。

表2 视觉特征参数
2.2 疲劳状态对眨眼行为影响
2.2.1眨眼持续时长
眨眼行为指上下眼睑的闭合行为[12]。如图2所示,新手驾驶人随着驾驶时间的增长,疲劳感逐渐堆积,导致眨眼持续时长增大,整体变化趋势与老手驾驶人相似,但老手驾驶人越疲劳,眨眼时长的变化范围越大,尤其是进入重度疲劳状态时,眨眼时长在300~1 000 ms[13]。方差分析结果显示,各疲劳驾驶状态对新手驾驶人的眨眼持续时长有显著影响(F=83.694,P<0.002),与清醒驾驶状态相比,轻度疲劳驾驶(P=0.000<0.05)、中度疲劳驾驶(P=0.000<0.05)与重度疲劳驾驶(P=0.000<0.05)均有显著性差异,且各驾驶状态两两之间均体现出显著性差异。

图2 不同疲劳状态下的平均眨眼时长
2.2.2眨眼频率
单位时间内的眨眼次数称为眨眼频率,眨眼频率与任务的复杂度相关,面临的任务越复杂,眨眼频率越高[14]。如图3所示,新手驾驶人眨眼频率随着疲劳程度的叠加而增大,但在陷入重度疲劳时眨眼频率反而较低。分析可知,清醒至中度疲劳阶段,新手驾驶人的疲劳程度越高,其眨眼频率越大,但各阶段间状态差别不明显,且部分区间重叠度较高,但当驾驶人陷入重度疲劳时,眨眼频率反而最低,且误差范围较大,说明此时新手驾驶人对自身的控制不足,逐渐放弃疲劳抵抗,导致眼动频率波动较大,且眨眼频率在各疲劳状态间无明显差异性。

图3 不同疲劳状态下的平均眨眼频率
2.3 疲劳状态对扫视行为影响
扫视行为,也被称为眼跳行为,存在于搜索过程中,是注视点从某一目标移动到另一目标的运动[15]。选取扫视次数、扫视时长、时间窗扫视总时长探究疲劳对新手驾驶人扫视行为的影响。
2.3.1扫视次数
扫视指目光向四周移动掠过,且扫视并非简单的注视点转移,而是短暂的快速移动并伴随着偶尔停留。可从图4得出,驾驶人的扫视次数随着疲劳程度的增加而降低。清醒时的扫视次数分布范围在10~20次/min,此时被试者的眼球的活动较疲劳时相对活跃,且差异性较大,但陷入疲劳时的扫视频率则普遍低至10次/min以下。正常驾驶组与重度疲劳驾驶组间的扫视频率差异明显,但各疲劳等级间存在较多重合区域,差异性不明显。

图4 不同疲劳状态下单位时间窗内扫视次数
2.3.2扫视时长
当驾驶人捕捉到目标信息时,会进行短暂停留,随后转移至下一信息点,开启新一轮注视,扫视时长则是相邻2个注视点发生的时间间隔,在真实驾驶中,分析扫视指标可判断驾驶员对道路信息的接收情况,当驾驶人处于清醒状态时,扫视活动数量较多,接收外界的信息能力较强。如图5所示,驾驶人随着疲劳程度的加深,扫视时长越来越少,分析结果显示,不同的疲劳驾驶状态对扫视时长有显著影响(F=85.570,P=0.001<0.05),与清醒驾驶状态相比,轻度疲劳驾驶(P=0.008<0.05)、中度疲劳驾驶(P=0.000<0.05)与重度疲劳驾驶(P=0.000<0.05)均有显著性差异,各驾驶状态两两之间均体现出显著性差异。
2.3.3扫视总时长
为进一步探讨扫视时长对疲劳程度的敏感性,在2.3.2节基础上求取时间窗内的扫视总时长。
(1)
式中:N为时间窗长度。
图5、图6为新手驾驶人在不同疲劳状态下的平均扫视时长和单位时间窗内扫视总时长。分析结果显示,不同的疲劳驾驶状态对扫视时长有显著影响(F=4.861,P=0.000<0.05),与清醒驾驶状态相比,轻度疲劳驾驶(P=0.001<0.05)、中度疲劳驾驶(P=0.000<0.05)与重度疲劳驾驶(P=0.000<0.05)均有显著性差异,且各驾驶状态两两之间均体现出显著性差异,重度疲劳驾驶状态下单位时间窗内的扫视总时长最少。

图5 不同疲劳状态下的平均扫视时长

图6 不同疲劳状态下单位时间窗内扫视总时长
2.4 疲劳状态对注视行为影响
2.4.1注视时长
注视行为是指眼睛为得到物体的高清画面,将中央凹瞄准物体并持续一段时间的眼动行为,驾驶人通过该行为来获取和识别交通环境信息,注视时长的长短在一定程度上可以反映出驾驶人的精神疲劳状态[16]。图7为新手驾驶人不同疲劳状态下的平均注视时长,分析结果显示,各驾驶状态对注视时长均值有显著影响(F=10.214,P=0.000<0.05),与清醒驾驶状态相比,轻度疲劳驾驶(P=0.009<0.05)、中度疲劳驾驶(P=0.002<0.05)与重度疲劳驾驶(P=0.012<0.05)均有显著性差异,且各驾驶状态两两之间均体现出显著性差异,重度疲劳驾驶状态下的平均注视时长最大。

图7 不同疲劳状态下的平均注视时长
2.5 疲劳状态对瞳孔状态影响
分析各级疲劳状态对瞳孔状态的影响,反映瞳孔状态的指标包括:瞳孔面积、瞳孔变异系数。
2.5.1瞳孔面积
瞳孔面积能体现驾驶人的紧张状态,是反映视觉注意状态的重要指标[17]。当新手驾驶人处于清醒状态时,瞳孔尺寸会较为平稳,而疲劳状态下的驾驶人瞳孔面积会收缩且发生一定波动,如图8所示。

图8 不同疲劳状态下的平均瞳孔面积
方差检验结果显示,新手驾驶人不同的疲劳驾驶状态对平均瞳孔面积有显著影响(F=90.999,P=0.001<0.05),与清醒驾驶状态相比,轻度疲劳驾驶(P=0.016<0.05)、中度疲劳驾驶(P=0.008<0.05)与重度疲劳驾驶(P=0.010<0.05)均有显著性差异,且各驾驶状态两两之间均体现出显著性差异。
2.5.2瞳孔变异系数
瞳孔直径与精神疲劳之间的相关性较高,而瞳孔直径变异系数则反映了驾驶人瞳孔直径的波动情况[18]。在2.5.1节的基础上提取瞳孔直径,进而获取瞳孔直径变异系数(CVPD),用以研究瞳孔直径与不同疲劳程度之间的关系。
(2)
式中:PD_mean为时间窗内瞳孔直径的均值;PD_std 为时间窗内瞳孔直径的标准差。
如图9所示,瞳孔直径变异系数呈上升趋势,疲劳强度越高,CVPD越大,此时瞳孔直径的波动越大,老手驾驶人亦呈现上升趋势,但老手驾驶人在进入重度疲劳状态时,其变化区间明显增大,为0.3~1,由此可见新手驾驶人在重度疲劳状态时,其瞳孔状态更为稳定[13]。分析结果显示,不同的疲劳驾驶状态对瞳孔直径变异系数有显著影响(F=223.478,P=0.001<0.05),与清醒驾驶状态相比,轻度疲劳驾驶(P=0.012<0.05)、中度疲劳驾驶(P=0.005<0.05)与重度疲劳驾驶(P=0.003<0.05)均有显著性差异,且各驾驶状态两两之间均体现出显著性差异,重度疲劳驾驶状态下的平均瞳孔直径变异系数更大,即新手驾驶人的瞳孔状态更不稳定。

图9 不同疲劳状态下的瞳孔直径变异系数
2.6 实验分析
疲劳驾驶对新手驾驶人的眨眼行为、扫视行为、瞳孔尺寸均有影响[19],眨眼持续时长均值、扫视时长均值、扫视总时长、瞳孔面积均值、瞳孔变异系数均值、注视时间均值6项指标与新手驾驶人各驾驶状态有显著性差异,可初步将其作为新手驾驶人疲劳驾驶识别的指标,为进一步验证指标对新手驾驶人疲劳状态识别的有效性,利用支持向量机模型和基于灰狼优化算法的支持向量机模型,将其作为输入变量,检验模型的识别效果。
3 驾驶疲劳检测模型
3.1 灰狼优化算法
灰狼优化算法(grey wolf optimmizer,GWO)原理与灰狼猎捕猎物相似,该算法把灰狼群按照自然生存法则划分为4个等级,如图10所示[20]。图中A、B、C为狼群中适应度最好的3匹狼,其他灰狼为D。A狼作为决策狼,所有灰狼必须听从A狼的指挥调度;B狼作为军师狼,辅佐A狼制定正确决策;C狼支配D狼,D狼跟随A、B、C狼对猎物进行捕食,猎物的位置即作为目标函数的最优解。
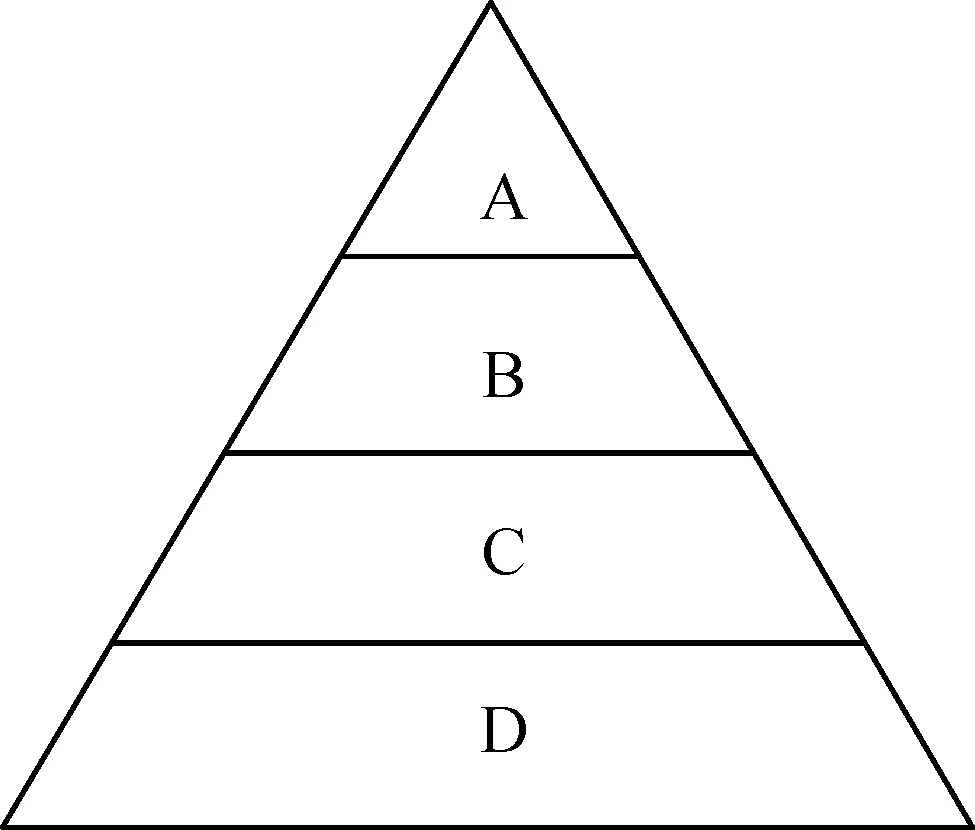
图10 狼群等级图
具体实现步骤如下:
步骤1求解猎物与灰狼之间的距离Q:
Zd=|EeXx(t)-X(t)|
(3)
X(t+1)=Xx(t)-Q·Z
(4)
式中:Xx(t)代表更新后A、B、C狼的最佳位置;X(t)代表所有可能的解,即灰狼此刻的位置;Q和Ee代表在t时刻更新的位置系数,计算过程如下:
Q=2b·γ1-b
(5)
Ee=2γ2
(6)
式中:b为收敛因子,由迭代次数的增加从2减小为0,其过程为线性减少;γ1、γ2为[0,1]区间的随机值。
步骤2在猎物追寻过程中,由A、B、C 3只灰狼制定前进方向,逐步向猎物靠近,各狼位置更新如下:

(7)

(8)
(9)
其他狼群位置根据A、B、C得到最优位置后进行更新,X(t+1)为A、B、C更新后的位置。
步骤3确定猎物的位置并进行捕获。|Q|的大小代表灰狼是否获取猎物的位置,而-b≤Q≤b,当|Q|≤1时,算法达到收敛,获取到猎物的位置。
3.2 支持向量机
支持向量机通过建立特征向量与输出向量间的映射模型来实现数据分类,即给定一个样本输入值后,能够得到该映射关系下的对应输出[21]。SVM的建立,首先需选用核函数把低维输入输出值转化为高维空间的内积,核函数中,径向基核函数以需确定参数少、映射维度广,且运算相对简单等特点,得到了广泛应用。径向基核函数如下所示:
(10)
式中:g为宽度参数。
3.3 基于GWO-SVM的新手驾驶人疲劳识别模型
采用GWO优化算法对疲劳驾驶的SVM检测模型的惩罚参数以及核函数宽度参数进行参数全局寻优,以达到疲劳驾驶状态识别的准确性和泛化能力,具体流程如图11所示。
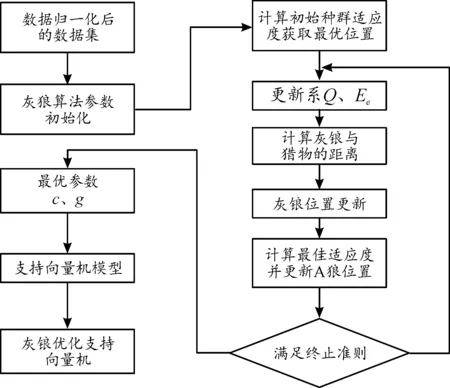
图11 GWO-SVM实现流程框图
3.4 模型训练
本文以5 min为时间窗,从实验数据中提取了前文中的各个眼动指标数据,共得到111组清醒状态样本,186组轻度疲劳状态样本,54组中度疲劳样本和32组重度疲劳样本。随机选取各疲劳等级样本数的70%作为测试集样本。在Matlab中进行SVM及GWO-SVM的模型训练。
3.5 测试结果及分析
将剩下的样本作为测试集,对疲劳检测模型进行测试。测试结果如图12—14所示,当支持向量机的惩罚参数、径向基函数的宽度参数分别为371.788 6、1.428时,模型的交叉验证率达到94.186%,GWO-SVM的识别率达到88.372 1%。

图12 SVM算法识别图
为进一步验证模型可靠性,对其进行多次训练测试,取平均值作为最终识别结果,如表3所示,SVM模型最终识别率为83.465 2%,GWO-SVM模型识别率为88.348 0%,GWO-SVM较传统的SVM模型识别率有一定提升,具有可靠性,可用于新手驾驶人的疲劳驾驶状态识别。

表3 模型识别率
4 结论
1) 当新手驾驶人的疲劳程度越来越高时,其眨眼持续时长均值、瞳孔变异系数均值、注视时间均值明显增加,而扫视时长均值、扫视总时长、瞳孔面积均值降低,且都与各驾驶状态呈显著性差异,而眨眼频率、扫视次数虽有变化,但与各疲劳状态无显著性差异;与已有研究对比发现,新老手驾驶人在疲劳驾驶时,眨眼持续时长及瞳孔变异系数的变化整体趋势相近,但具体变化幅度存在一定差异,推测其他眼动指标应该也存在变化差异,具体表现还需进一步研究。
2) 基于SVM的驾驶疲劳识别模型结果显示,新手驾驶人疲劳状态可以通过眼动指标进行判断,而GWO-SVM则进一步提升了模型精度,证明眼部特征在新手驾驶员疲劳检测方面具有较好的适用性。
3) 量化了疲劳程度对新手驾驶人视觉的影响,可直观地了解各疲劳状态对新手驾驶人视觉参数的影响程度。由于实验是在模拟驾驶情况下进行,与真实驾驶环境存在一定偏差,后续应考虑真车实验,并招募老手驾驶人进行对比研究。
猜你喜欢
小学阅读指南·低年级版(2021年3期)2021-03-19
小太阳画报(2019年1期)2019-06-11
海峡姐妹(2018年12期)2018-12-23
数学大王·低年级(2018年5期)2018-11-01
青年歌声(2018年2期)2018-10-20
作文通讯·高中版(2017年6期)2017-07-10
阅读与作文(初中版)(2017年6期)2017-07-05
快乐作文·低年级(2017年3期)2017-03-25
饲料与畜牧(规模养猪)(2017年1期)2017-02-28
学苑教育(2015年16期)2015-08-15