
真空泵吸鱼过程气液两相流数值分析
2023-02-25 13:13:36林礼群张耀明楚树坡徐志强
渔业现代化 2023年1期
林礼群,张耀明,刘 平,楚树坡,徐志强
(1 中国水产科学研究院渔业机械仪器研究所,农业农村部远洋渔船与装备重点实验室,上海200092;2 青岛海洋科学与技术试点国家试验室,山东 青岛 266237)
随着海水养殖不断向深远海推进,大型养殖平台得到迅速发展[1-2],单个平台容积大产量高,使得取鱼工作变得困难[3],海上平台捕鱼作业机械化问题也日益凸显[4]。真空吸鱼泵由于流道无运动部件,损伤小、能耗低,是目前深远海养殖平台较为理想的活鱼输送设备[5]。
目前对真空吸鱼泵的研究主要以试验手段为主,研究集中在结构参数设计、鱼水比、吸鱼操作方式等对吸鱼性能及效率的影响[6-10]。针对真空吸鱼泵吸鱼过程流动特性的试验及数值计算很少有文献报道,台湾屏东科技大学陈士华[11]采用计算流体力学(computational fluid dynamics,CFD)数值方法,分析了集鱼筒内下方流场产生的旋涡,旋涡易造成鱼体损伤,并通过试验发现同心圆吸鱼口对罗非鱼的吸取效果较好;台湾大学古宽闵[12]基于多相流理论,利用气力提升泵实现了远海网箱养殖中渔获的成功起捕。丁子阳等[13]设计了一种单罐真空吸鱼泵并用Fluent计算得到了鱼水混合物内部流场的流动图和速度矢量图,表明设计真空吸鱼泵可以有效地减少鱼类碰撞伤害。这些研究并未关注到真空吸鱼泵内水气界面演绎过程以及抽气压力变化对吸入速度的影响问题,使得优化设计难以进行。
本研究以某深远海养殖平台真空吸鱼泵为研究对象,基于体积函数法(volume of fluid,VOF)两相流模型,对真空吸鱼泵集鱼装置内部气液两相流动过程进行数值模拟,探究真空吸鱼泵吸鱼过程气液流动机理以及抽气压力变化对吸鱼速度影响,以期为真空吸鱼泵的抽气压力、阀门开启时间控制等操作参数提供理论依据。
1 计算模型及边界条件
1.1 物理模型
以某深远海养殖工船的真空吸鱼泵为研究对象,该真空吸鱼泵采用间歇式吸排鱼方式,使用水环真空泵进行抽气,设计鱼水流量为80 t/h。对吸鱼流道的吸鱼过程进行计算,吸鱼流道包括吸鱼管道与集鱼筒内部,采用二维计算模型。吸鱼管与集鱼筒流道如图1所示。
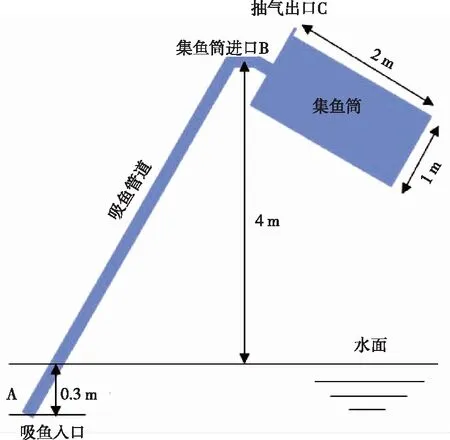
图1 吸鱼管与集鱼筒流道示意图
管道内部AB段直径为0.16 m,吸程高4 m;集鱼筒内部长2 m、宽1 m,集鱼筒出口端C口直径为0.04 m;A为吸鱼管入水口,在水面以下0.3 m,B为集鱼筒进水口,C为集鱼筒抽气口;采用Ansysworkbench的mesh模块对吸鱼流道二维计算域进行结构建模及网格划分,为提高计算精度集收敛性,采用四面网格划分,网格总数为26 178,网格平均正交质量为0.995,最小正交质量为0.869,无负值面积单元。
1.2 控制方程
真空泵吸鱼过程具有自由界面气液两相流动特性,采用瞬态VOF模型能够精确捕捉复杂自由界面气液两相流变化[14]。VOF方法通过引入体积函数ε确定气液界面,在所计算单元网格内:ε=0表示网格内全部是空气;ε=1表示网格内充满液体;0<ε<1表示网格内是气液混合体。其中,计算单元网格内混合流体的密度和黏度分别为[15]:
ρm=εgρg+(1-εg)ρl
(1)
μm=εgμg+(1-εg)μl
(2)
体积函数ε的输运方程为:
(3)
混合流体流动的基本方程为连续方程和Navier-Stokes方程:
(4)
(5)
式中:ρm为混合流体密度,kg/m3;ρg为气体密度,kg/m3;ρl为液体密度,kg/m3;εg为气体体积函数;μm为混合流体黏度系数;μg为气体黏度系数;μl为液体黏度系数;εp为第p相的体积函数,p=1、2,分别表示液相和气相;t为时间,s;v为流体速度,m/s;P为流体单元网格所受压力,Pa;μ为流体动力黏度,Pa/s;f为质量力,此处为重力加速度,m/s2。
由于该流动过程属于瞬态紊流过程,粘性模型采用标准k-ε湍流模型,压力-速度耦合方式选用PISO算法,可以有效提高计算速度和收敛性。
1.3 边界条件与初始条件
计算域边界条件的进口为A口,其进口速度未知,该位置接近水面,设置压力进口条件,进口压力为标准大气压值;出口C设置为压力出口边界,由于集鱼筒的出气口是影响吸鱼性能的关键因素,文中分别设置了不同出口压力进行计算;空气为理想可压缩流体,设置为主相,水为不可压缩流体,设置为次相;吸鱼过程为瞬态计算,初始时刻,气液交界面在水面处,气液交界面至A口处为水相段,水的体积分数为1;气液交界面以上的管路流道及吸鱼筒流道均为空气相,水的体积分数为0。
2 计算结果及分析
2.1 吸鱼过程相位分析
吸鱼管与集鱼筒内不同时刻的气液两相瞬时状态如图2所示,红色代表水相,蓝色代表气相。抽气压力为-30 kPa条件下,t=0 s 时,即初始时刻,气液交界面至入口处为水相,气液交界面以上的管路流道及吸鱼筒流道均为气相;t=0.8 s时,水刚好到达集鱼筒入口,随后,水在重力作用下,倾斜向下流入并冲击到集鱼筒底部,由于水与壁面摩擦作用产生附壁效应,部分水流沿着壁面向上运动,运动到壁面一定高度后,再向下运动,不断卷入周围气体,使得水气相互掺混;t=3.7 s时,集鱼筒内的水刚好到达集鱼筒抽气口,集鱼筒内充满了水与大量气团组成的泡沫状气液两相混合体,有掺气现象产生[16-17],集鱼筒内脉动增大;之后如图2(e)~图2(f)所示,气泡不断运动,并聚集成更大气团,气团逐渐向抽气口方向运动,直至流出抽气口。为进一步分析集鱼筒内气液流动发展状态,继续保持集鱼筒排鱼阀关闭状态,增加了吸鱼过程非稳态数值计算时长,如图2(g)~图2(i)所示,集鱼筒内仍有大量小气泡存在,并随水不断流向抽气口,t=10 s,集鱼筒只含有少量小气泡,流动基本稳定。

图2 抽气压力-30 kPa下吸鱼过程不同时刻气液相位图
在该抽气压力条件下,由于集鱼筒内起始阶段流动波动大,鱼在集鱼筒内易受到壁面冲击与相互碰撞,造成一定程度外部损伤,可通过减缓吸鱼管及集鱼筒安装坡度、去除流道锐角、降低集鱼筒内鱼缓冲高度来等方式减少碰撞概率。集鱼筒注满时间很短,鱼在负压环境下时间仅几秒,压力下降远低于50 kPa/s,对鱼的损伤影响较小[18-20]。因此,在真空吸鱼泵设计中若过多增加集鱼筒容量尺寸,虽然改善了吸鱼泵流动性能及人工操作适应性,但是增加了鱼在负压环境的时间,当负压环境压力梯度超过了鱼的承受能力,会造成了鱼鳔不同程度的破损,使鱼身失去平衡,甚至因此死亡[21]。
2.2 吸鱼过程进口速度分析
吸鱼管道进口速度和集鱼筒进口速度是判定能否顺利吸鱼的重要因素,如果管道进口水的启动速度较低,由于鱼的应激反应,鱼将快速离开吸鱼管口,即便部分鱼被水一起吸入到管道,如果集鱼筒进口管道水流速小于鱼的游泳速度,鱼也可能逆流逃出管道,因此模拟计算并分析了不同抽气压力对吸鱼管道进口与集鱼筒进口水流速度的影响。不同抽气压力下水流速度随时间变化如图3所示。
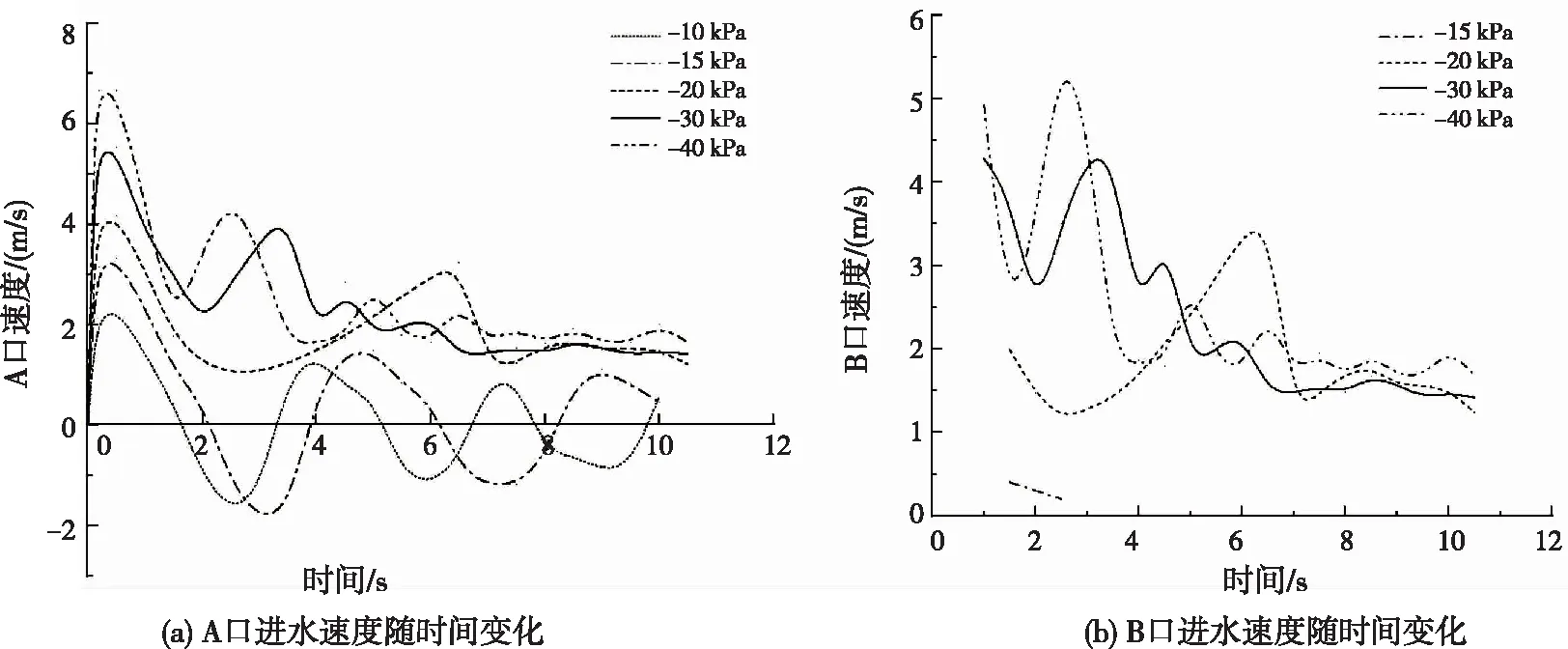
图3 不同抽气压力下水流速度随时间变化
图3a显示了不同抽气压力下A口进水速度随时间变化,A口的启动速度随着抽气压力的减小不断增大,且在t=0.5 s左右,进口A处的速度均大于2 m/s,之后速度波动减小。在t=7 s后,-40 kPa~-20 kPa条件下,A口速度逐渐平稳,且速度均大于1.5 m/s,根据上节中气液相位分析可知,此时集鱼筒内大气泡完全排出抽气口,部分水也从抽气口流出,在此段抽气压力范围内,集鱼筒注满水时间受抽气压力影响很小,若再降低抽气压力只会加重真空泵负荷。在所计算抽气压力为-10 kPa与-15 kPa条件下,吸水管出现了倒流现象,负值速度表示水倒流,结合图4中抽气压力在-15 kPa条件下的气液相位图分析,t=1.5 s时,水刚好到达管路最高吸程处,在t=2 s时,管路部分水没过最高点流入到集鱼筒内,其余水流沿管倒流向下,之后,水沿管道来回晃荡,由于流体与壁面摩擦作用造成能量耗散,管内水不再到达最高点,集鱼筒也不再进水。若进一步减小抽气压力,使得大气压与抽气负压之间压差增大,吸鱼管入口水具有较大动能而再次被抽到集鱼筒。抽气压力-15 kPa条件下不同时刻气液相位如图4所示。

图4 抽气压力-15 kPa条件下不同时刻气液相位图
图3b显示了不同抽气压力下B口进水速度随时间变化,其中,-40 kPa~-20 kPa条件下的B口速度变化趋势与A口速度基本相似,水流从A口吸入1 s左右后,从B口流入集鱼筒,之后速度波动减小。其中,在抽气压力-15 kPa条件下,B口在1.5~2.5 s时段有水流流过,图4中t=2 s及之后时刻对应的气液相位图可以很好说明。在抽气压力-20 kPa、t=2.3 s处,B口的速度降至1.1 m/s,对于游泳速度高于此速度的鱼,容易造成鱼逆流到管道入口外,考虑到实际工程应用中管路安装长度更长、弯头较多,造成的沿程损失与局部损失更大,因此真空吸鱼泵的抽气压力应不高于-20 kPa,才能保证将鱼水混合物抽到集鱼筒内。当抽气压力低于-40 kPa,会增加抽气真空泵的能耗,同时使集鱼筒内压力梯度接近50 kPa/s,致使鱼的损伤增加[18-19],因此,抽气压力保持在-40 kPa~-20 kPa范围可确保鱼水混合物顺利且损伤较小地抽到集鱼筒内。
3 结论
在一定抽气压力下,管道内水抽吸至集鱼筒后,不断卷入周围空气,产生了水与大量气团组成的泡沫状气液两相混合体,流动波动大,至t=7 s左右,流动趋于稳定,且集鱼筒注满水,鱼在负压环境接触时间短。抽气压力在-40 kPa~-20 kPa范围时,管道入口速度与集鱼筒入口速度随着抽气压力的减小先增大后波动减小,集鱼筒注满水时间受抽气压力影响小;当抽气压力高于-20 kPa时,容易造成倒流而无法吸鱼,当抽气压力低于-40 kPa,会增加抽气真空泵能耗以及集鱼筒内压力梯度,因此抽气压力保持在-40 kPa~-20 kPa范围可确保鱼水混合物顺利抽到集鱼筒内。
□
猜你喜欢
江苏安全生产(2023年11期)2023-12-14 12:05:26
真空与低温(2022年6期)2023-01-06 07:33:20
北京航空航天大学学报(2021年6期)2021-07-20 07:23:54
科技视界(2021年4期)2021-04-13 06:03:58
中国特种设备安全(2019年9期)2019-12-03 09:25:58
西南石油大学学报(自然科学版)(2016年6期)2017-01-15 14:14:17
橡胶工业(2015年6期)2015-07-29 09:20:34
机械工程师(2015年9期)2015-02-26 08:38:24
中国卫生(2014年11期)2014-11-12 13:11:20
无机化学学报(2014年3期)2014-02-28 17:31:00
