
Air combat target maneuver trajectory prediction based on robust regularized Volterra series and adaptive ensemble online transfer learning
2023-02-25 13:42XiZhifeiKouYingxinLiZhanwuLvYueXuAnLiYouLiShuangqing
Defence Technology 2023年2期
Xi Zhi-fei, Kou Ying-xin, Li Zhan-wu, Lv Yue, Xu An, Li You, Li Shuang-qing
Air Force Engineering University, No.1 Baling Road, Baqiao District, Xi'an, Shaanxi Province, China
Keywords:Maneuver trajectory prediction Volterra series Transfer learning Online learning Ensemble learning Robust regularization
ABSTRACT Target maneuver trajectory prediction is an important prerequisite for air combat situation awareness and maneuver decision-making.However,how to use a large amount of trajectory data generated by air combat confrontation training to achieve real-time and accurate prediction of target maneuver trajectory is an urgent problem to be solved.To solve this problem, in this paper, a hybrid algorithm based on transfer learning, online learning, ensemble learning, regularization technology, target maneuvering segmentation point recognition algorithm, and Volterra series, abbreviated as AERTrOS-Volterra is proposed.Firstly, the model makes full use of a large number of trajectory sample data generated by air combat confrontation training,and constructs a Tr-Volterra algorithm framework suitable for air combat target maneuver trajectory prediction, which realizes the extraction of effective information from the historical trajectory data.Secondly, in order to improve the real-time online prediction accuracy and robustness of the prediction model in complex electromagnetic environments, on the basis of the Tr-Volterra algorithm framework, a robust regularized online Sequential Volterra prediction model is proposed by integrating online learning method, regularization technology and inverse weighting calculation method based on the priori error.Finally, inspired by the preferable performance of models ensemble,ensemble learning scheme is also incorporated into our proposed algorithm,which adaptively updates the ensemble prediction model according to the performance of the model on real-time samples and the recognition results of target maneuvering segmentation points, including the adaptation of model weights; adaptation of parameters; and dynamic inclusion and removal of models.Compared with many existing time series prediction methods, the newly proposed target maneuver trajectory prediction algorithm can fully mine the prior knowledge contained in the historical data to assist the current prediction.The rationality and effectiveness of the proposed algorithm are verified by simulation on three sets of chaotic time series data sets and a set of real target maneuver trajectory data sets.
1.Introduction
Trajectory prediction is a process of learning and inferring the inherent information contained in the target's historical movement trajectory, and then making a reasonable prediction of the target's future movement trend.In the process of air-to-air confrontation,the accurate prediction of target maneuver trajectory is the basis of air combat situation assessment, intention recognition and maneuver decision-making.Therefore,it is of great significance to study the problem of air combat target maneuver trajectory prediction.
In recent years, the research directions of target maneuver trajectory prediction methods are mainly divided into two categories:model-driven and data-driven methods.The model driven method is based on certain prior knowledge and combined with the motion law of the target to establish an accurate dynamic or kinematic model, and then achieve accurate prediction of target's future trajectory.NI et al.[1]make full use of the intention information provided by broadcast automatic correlation monitoring system to realize the accurate prediction of target trajectory.In Ref.[2], a trajectory prediction model for climbing and descending motion of transport aircraft is constructed based on genetic algorithm.In Ref.[3]a trajectory prediction model based on Bayesian theory by identifying the flight intention of the aircraft is proposed.Hang et al.[4]achieve accurate prediction of the target trajectory by establishing a simplified dynamic model of the target.Wang et al.[5]achieve trajectory prediction by establishing a lift-drag ratio function.The target maneuver trajectory prediction method based on dynamic model or kinematic model requires high accuracy of the model, and the initial state of the target and the setting of model parameters have a great impact on the trajectory prediction performance.Kalman filter algorithm is the most common method of model driven target maneuver trajectory prediction.Kalman filter algorithm is a method of trajectory prediction by describing the recurrence law of system state and combining with target maneuver model.Aiming at the target motion pattern changes frequently and the maneuvering range is large,a motion trajectory prediction algorithm based on polynomial Kalman filter is proposed in Ref.[6].In Ref.[7],aiming at the lack of historical position information, an improved Kalman filter algorithm with system noise estimation is proposed to predict the target maneuvering trajectory.Aiming at the traditional trajectory prediction algorithm cannot meet the requirements of high-precision and real-time prediction, a dynamic trajectory prediction algorithm based on Kalman filter is proposed in Ref.[8].Aiming at the problems of high nonlinearity, intractable data processing and low prediction accuracy of high-order target motion models, an improved interactive multi-model trajectory prediction algorithm is proposed in Ref.[9].The target maneuver trajectory prediction method based on Kalman filter algorithm is limited by both the matching degree of target maneuver model and the accuracy of algorithm.It is also difficult to improve the prediction accuracy by weighting multiple target motion models based on IMM.
The data-driven target maneuvering trajectory prediction method takes intelligent algorithms as the core,and establishes the target maneuver trajectory prediction model combined with big data.The research ideas of data-driven target maneuvering trajectory prediction methods can be divided into two categories:one is to regard the target maneuvering trajectory prediction problem as a function fitting problem; the other is to regard it as a time series prediction problem [10].According to the characteristics of target maneuvering trajectory, a target maneuvering trajectory prediction model based on least squares curve fitting is constructed in Ref.[11].Using a large number of target maneuvering trajectory sample data,the target maneuvering trajectory prediction model is trained offline based on convolutional neural network [12].In Ref.[13], the directional propagation neural network is used to predict the target maneuver trajectory, but the prediction error is large.According to the motion characteristics of hypersonic vehicle,the generalized regression neural network is used to predict the target maneuver trajectory in Ref.[14].The above methods that regard the target maneuvering trajectory prediction problem as a function fitting problem ignore the dynamic characteristics of the target maneuvering trajectory, and regard the target maneuvering trajectory as static data for fitting, resulting in low prediction accuracy of the target maneuvering trajectory.Considering the target maneuver trajectory prediction as time series prediction can avoid the above problems.This kind of method does not need to establish an accurate target motion model,and the model structure is simple,but the parameter adjustment process of the model is complicated,and the requirements for data samples are high.Target maneuvering trajectory prediction methods based on time series mainly include autoregressive model (Auto Regreessive, AR) [15,16], grey model [17], hidden Markov model [18], Volterra model [19], data grouping processing model (Group Method of Data Hangling,GMDH) [20], Gaussian Mixture Model [21], Fuzzy Time Series Forecasting [22], Elman Neural Network [23], Nonlinear Auto Regressive with Exogenous Inputs (NARX) [24], recurrent neural network [25-29], in which the prediction methods of recurrent neural network include RNN[25],echo-state neural network(ESN)[26], long short-term memory neural network (Long Short Term Memory, LSTM) [27-29], Gated recurrent unit (GRU).In Ref.[27],the LSTM is improved by using the stochastic gradient descent method, and the target position, attitude information and relative situation information between the enemy and the enemy are used to construct an end-to-end mapping, so as to realize the accurate prediction of the target maneuvering trajectory.The air combat information is introduced as the input of the prediction model,and the Bi-LSTM is used to construct the target maneuver trajectory prediction model in Ref.[28].SHI et al.[29]combined LSTM and ARIMA to predict short-term flight trajectories.
Whether it is based on model-driven or data-driven prediction methods, it is necessary to assume that the training samples and prediction samples satisfy the same distribution condition, and a large number of training samples can be obtained to train the prediction model.Due to the high dynamics of air combat confrontation process and the complexity of electromagnetic environment,it is difficult to meet the preconditions of air combat target maneuver trajectory prediction.In the process of air combat confrontation, the target trajectory data obtained by airborne sensors has high timeliness, and the air combat confrontation situation will change greatly over time, resulting in great differences in the distribution of old and new data.Directly predicting the current target trajectory by using the historical data of a long time ago will lead to great uncertainty in the accuracy of the prediction results.Therefore,many existing methods take the data adjacent to the current prediction point as a new training sample and abandon the data points far away from the current prediction point, which can improve the prediction performance to a certain extent and lead to the loss of some valuable historical information.Prediction performance also suffers significantly when fewer new data points are available.In addition, a large amount of historical data on air combat confrontation has been generated by the exercises over the years.How to make the best use of these historical data and extract effective information as the prior knowledge of real-time air combat target maneuver trajectory prediction model to improve the prediction performance is an urgent problem to be solved.Therefore, in this paper, the transfer learning algorithm is combined to realize the transfer of effective prior knowledge of the exercise training data.At the same time, considering that the essence of target maneuver trajectory prediction is a time series prediction problem, it has a high degree of nonlinearity and time variability.In view of the fact that the Volterra functional model can well characterize nonlinear systems and achieve accurate prediction of time series, the basic model is constructed based on regularized Volterra series in this paper.
Volterra series is a functional series called Talyor series with memory function proposed by Italian mathematicians in 1880.The essence of Volterra series is the expansion of functional series,which can approximate the continuous function represented by any nonlinear system with arbitrary precision[30],and can achieve accurate prediction of time series, but the prediction effect of Volterra series is easily affected by data quality.However, in the process of air combat confrontation, due to the complexity of the electromagnetic environment, there will inevitably be certain outliers in the target data obtained by the airborne sensors,and the existence of the outliers will have a greater impact on the prediction effect.Based on the timing of target information obtained by airborne sensors and combined with migration learning algorithm and online learning algorithm, a robust regularized online sequential transfer learning with Volterra (RTrOS-Volterra)prediction model with anti-outlier ability is proposed.RTrOSVolterra prediction model inherits the basic idea of sequential learning of online prediction model, and carries out inverse weighting calculation based on the prior error of samples in the process of online learning, so as to effectively suppress the influence of outliers on the prediction model.At the same time,the rtros Volterra prediction model makes the algorithm have good stability by introducing Tikhonov regularization technology.In addition,considering the significant advantages of ensemble learning in improving the generalization ability of the model, the ensemble learning theory is further introduced on the basis of RTrOS-Volterra prediction model.According to the prediction performance of each basic predictor and the target maneuvering characteristics,dynamically adjust the basic predictor set, basic predictor model parameters and corresponding weights, a new AERTrOS-Volterra prediction model is proposed, and a transfer online learning framework suitable for air combat target maneuver trajectory prediction is constructed,which makes full use of training data and improves the prediction accuracy of air combat target maneuver trajectory prediction.The innovations of the trajectory prediction model can be summarized as follows:
(1) Based on the historical data of air combat confrontation, a transfer learning framework suitable for target maneuver trajectory prediction is constructed.
In view of the problem that the training data of the traditional target maneuvering trajectory prediction model and the target maneuvering trajectory data obtained in real time do not satisfy the same distribution,the AERTrOS-Volterra prediction model builds a transfer learning framework suitable for target maneuvering trajectory prediction by integrating the transfer learning algorithm.The model extracts effective information from the historical trajectory data of air combat confrontation, and uses it as the prior knowledge of the real-time online prediction model to assist the current prediction task, thereby improving the prediction performance of the algorithm.
(2) The improved Volterra series prediction model based on transfer learning is combined with online learning algorithm to improve the real-time online prediction performance of the model.
In order to better deal with the nonlinear and time-varying characteristics of target maneuvering trajectory prediction, the Volterra series which can approximate the continuous function represented by any nonlinear system with arbitrary accuracy is used as the basic prediction model, and the online learning algorithm is introduced to realize the algorithm real-time online prediction, so as to better deal with the real target information obtained by airborne sensors in real time,and improve the accuracy of target maneuver trajectory prediction.
(3) The regularization technology is introduced,and the inverse weighting calculation is carried out based on the a priori error of the sample,so as to effectively suppress the influence of outliers on the prediction model.
In order to effectively deal with the influence of noise on the maneuvering trajectory prediction accuracy of air combat targets in complex electromagnetic environment and improve the stability of the prediction model, AERTrOS-Volterra prediction model integrates regularization technology and direction weighting technology based on current prediction error.
(4) Combined with the target maneuver segmentation point recognition algorithm and prediction performance, an adaptive update integrated prediction model is constructed.
In order to better adapt to the problem of air combat target maneuver trajectory prediction, AERTrOS-Volterra prediction model combines the target maneuver segmentation point recognition algorithm and prediction performance, and dynamically updates the integrated model in real time.The basic predictor with poor prediction performance will be replaced by the prediction model trained based on new data; At the same time, based on the prediction performance index of the basic predictor, the method dynamically assigns weights to ensure the effectiveness and accuracy of the integrated model.
The rest of this paper is arranged as follows.Section 2 and Section 3 describe in detail the preprocessing methods.Section 4 give the structure of the proposed prediction model.Two experiments and the discussions are showed in Section 5.Finally,Section 6 gives the conclusions.
The rest of this paper is organized as follows.In Section 2, we briefly review some basic theory.In Section 3, exhaustive analysis of RTrOS-Volterra is deduced.Then detailed elucidations of our newly proposed AERTrOS-Volterra are presented in Section 4.Experiments over synthetic and Air combat target maneuver trajectory data are carried out in Section 5, where corresponding experimental results are reported and discussions are provided.Finally, a summary of our work is displayed in Section 6.
2.Basic theory
2.1.Transfer learning
Transfer learning (TL) is a learning mechanism that uses the effective information obtained when solving historical related tasks or problems to assist in solving new problems [31].Different from traditional machine learning methods,transfer learning breaks the assumption that training data and test data must obey the same distribution.In this subsection, some definitions about transfer learning are given.
Domain:A domain is composed of a feature space χ and a marginal distributionP(X)of feature space,which can be expressed asD={χ,P(X)}.And the symbolXdenotes an instance set,which is defined asX= {x|xi∈X,i= 1,2,…,n}∈χ.
Task:For a given domainD={χ,P(X)},a taskTincludes a label spaceyand a predictorf(·), which can be expressed asT= {y,f(·)}.f(·) cannot be observed directly, but it can be learned from the training set.The predictorf(·)is obtained and can be applied to the prediction of a new examplex, that isf(x).In terms of probability,f(x) can be written asP(y/x).
Transfer learning:Given a source domainDs={(xs1,ys1),…,(xsns,ysns)},a target domainDT={(xT1,yT1),…,(xTnt,yTnt)}.Where, 0 ≤nt≤ns.Given a source domainDsand its corresponding learning taskTs, a target domainDTand its corresponding learning taskTT,transfer learning is to useDsandTsto improve the prediction ability offT(·)whenDs≠DTorTs≠TT.
2.2.Phase space reconstruction theory
The phase space reconstruction(PSR)theory was first proposed by Takens in 1981 [32].PSR is considered as a useful method to reconstruct the phase space of chaotic time series.According to Takens embedding delay theorem[32],a new system with the same dynamic characteristics as the original system can be obtained by selecting appropriate time delay and embedding dimension,so that the information contained in the time series can be fully exploited.A time seriesx={xi|i=1,2,…,N} can be reconstructed in multidimensional phase space as follows:
where,mis the embedding dimension,τ is the delay time,andMis the number of samples in the reconstructed phase space,which can be expressed as
2.3.C-C method
The traditional calculation method regards the embedding dimension and time delay as two independent parameters, which need to be calculated independently.The research in recent years shows that the embedding dimension and time delay are interrelated.The determination of time delay should not be independent of the embedding dimension, but should be determined by combining the time window τw= (m- 1)τ.
In this paper,the C-C method[33]is used to determine the time delay and embedding dimension.The C-C method uses the correlation integral of time series to form statistics,which reflects the correlation of nonlinear time series.Based on the relationship between time delay and statistics, the time window and time delay can be calculated simultaneously,so that the embedding dimension can be determined.The correlation integral is defined as
where,ris the neighborhood radius,dijis the Euclidean distance between two phase points in phase space,H(z) is the Heaviside function, which is defined as:
where,Jis the number ofr.
In order to express the relationship betweenS(m,N,r,t) andr,the difference ΔS(m,t) between the maximum and minimum values of the two radius is expressed as
According to Brock[34]mathematical statistical conclusions,in general, we can obtain the range values of themandr m=2,3,4,5,rj=jσ/2,j=1,2,3,4,where σ is the standard deviation of the time series.The three test statistical variables are defined as
where, the time delay τ is the time corresponding to the first minimum of Δ(t)or the time corresponding to the first zero ofS(t).WhenScor(t)obtains the minimum value,the corresponding time is the time window τw.The C-C method uses statistical theory to obtain the time delay and embedding dimension.The calculation is simple, the calculation amount is small, and it has strong antiinterference ability.
2.4.Volterra series model
Volterra series provides a convenient framework for the representation of nonlinear dynamic systems.The system response is expressed by infinitely increasing integral operators, and each series term is expressed in the form of multi-dimensional convolution of the input as a kernel function.The first-order Volterra kernel function represents the linear dynamic characteristics of the system,while the higher kernel function represents the nonlinear part.Volterra series is usually used for signal processing and model identification of nonlinear systems.It has good nonlinear expression ability and can realize the accurate prediction of nonlinear systems.
For a discrete-time nonlinear dynamic system with inputx(k)and outputy(k), the Volterra series expansion of the nonlinear system can be described as follows by
where,e(k) is the truncation error of Volterra series,pn(m1,m2,…mn)is the n-order Volterra kernel.The Volterra kernel has symmetry [35].In the process of determining the Volterra kernel coefficient vector, making full use of its symmetry can greatly reduce the computational complexity of the model.
The truncated Volterra series can accurately approximate the description of many nonlinear systems.Generally, the first three order truncated form is used to describe the nonlinearity, so the first three order kernel function of Volterra series model is usually identified [19].According to the symmetry of the Volterra kernel and the third-order truncation form of the Volterra series, the output of the system can be expressed as
where,Miis the memory length of the model.WhenMitakes an appropriate value, the truncation errore(k) can be sufficiently small.s1(m1),s2(m1,m2),s3(m1,m2,m3) are defined as follows:
Assuming that the highest order of the truncation of the Volterra series model isN, and the input matrix of the system is expressed by Eq.(18)
where,Lis the length of the input data.Then the input and output vectors at timekand the truncated Volterra kernel coefficient vector the system can be expressed as
where,X(k)is the input vector and Y is the output vector,P is the Volterra kernel coefficient vector.Based on Eq.(19)to Eq.(21),the system can be expressed as
where, e is a priori error signal.As can be seen from Eq.(22),nonlinear system identification based on truncated Volterra series model is to determine the kernel vector H of Volterra Series on the basis of known system input and output.Its essence is an optimization parameter estimation problem.Solving the Volterra kernel coefficient vector can be transformed into the least square solution of Eq.(23), the optimization problem is formulated as follows:
According to the principle of empirical error minimization, the least squares solution of the Volterra kernel coefficient vector is obtained using Eq.(24)
3.Time series forecasting model based on RTrOS-Volterra algorithm
3.1.Transfer learning part of RTrOS-Volterra
The traditional target maneuver trajectory prediction algorithm is usually based on the following assumptions:the off-line training data and the target maneuver trajectory data generated in the process of real-time air combat confrontation belong to the same domain, that is, the off-line training data of the prediction model and the target maneuver trajectory data obtained in the process of air combat confrontation have the same statistical distribution characteristics.However,air combat confrontation is a complex and highly dynamic process, pilots make real-time decisions based on the current situation.Different pilots take different maneuvers under different air combat situations, resulting in differences in statistical characteristics between the offline training data of the prediction model and the target maneuvering trajectory data received in real time,which can not meet the preconditions of the traditional prediction model.Therefore, the performance of realtime online prediction of target maneuver trajectory using the model trained by historical data is poor.In addition,due to the high dynamics of air combat confrontation, online training target maneuver trajectory prediction can not meet the real-time requirements of the algorithm in the process of air combat confrontation.To solve the above problem, in this paper, transfer learning is introduced into the problem of maneuvering trajectory prediction of air combat targets.
Based on the transfer learning theory, the historical trajectory data of air combat countermeasure training are transferred to different but related real-time air combat countermeasure target maneuver trajectory prediction problems, so as to improve the performance of the online prediction model.In order to transfer the parameters of the Volterra series prediction model trained with a large amount of air combat historical data to the online target maneuver trajectory prediction model, a regularization method is used to realize the transfer of effective knowledge in the historical data.Firstly,the Volterra series model is used to mine the effective information contained in the historical trajectory data of air combat.Secondly,the parameters of the prediction model trained with historical trajectory data are transferred to the real-time online prediction model through the regularized transfer learning method, and the parameters are used as prior knowledge to train the prediction model suitable for the current task.According to the above analysis,the process of extracting effective information from historical data can be expressed as Eq.(25).
where samples obtained from previous data are denoted asDold=(,),k=1,2,…,N,Cs∈Ris the regularization parameter for the old dataset, which is used to balance empirical risk and structural risk.is the training error, Psis the Volterra kernel coefficient vector corresponding to historical samples.The corresponding Lagrangian problem of Eq.(26) is formulated as follows:
From Eq.(27), the Lagrange multiplier can be written as
Substituting Eq.(27) and Eq.(28) into Eq.(30) can we get
By analyzing Eq.(31), the Volterra kernel coefficient vector Psbased on historical samples data can be obtained
Based on Eq.(32),the effective information related to historical trajectory data of air combat confrontation can be obtained.Therefore,the next task is how to transfer the information obtained in the old data to the current prediction task.Given the currently available new training data set Dt=(,),i=1,2,…,Nt,combined with transfer learning theory, the current task can be transformed into the form of Eq.(33).
where, Ptis the Volterra kernel coefficient vector over the new data, and μ denotes the penalty parameter, β is a scale factor between 0 and 1, used to control the proximity measure of source and target domain parameters.Based on Lagrangian multiplier method,to solve Eq.(33)is equivalent to solving the corresponding Lagrangian problem
Simplifying Eq.(35), Eq.(38) and Eq.(39) can be obtained
Plug Eq.(36) and Eq.(39) into Eq.(37), and we can obtain the Volterra kernel coefficient vector after transferring
According to the above analysis, based on the transfer learning theory,we can fully mine the effective information contained in the historical trajectory data of air combat confrontation,and use it as a priori knowledge to train the real-time online air combat target maneuver trajectory prediction model, so as to improve the prediction accuracy of the real-time prediction model.
3.2.Robust online learning part of RTrOS-Volterra
In Section 3.1, based on Volterra series and transfer learning theory,a new Tr-Volterra prediction model is proposed.The model can extract information related to the current prediction task from historical data and transfer it to the prediction task, so as to improve the performance of the prediction model.However, both transfer learning and Volterra series are essentially offline learning algorithms, the Tr-Volterra prediction model needs to obtain all data at one time during training.In the problem of air combat target maneuver trajectory prediction, the target maneuver trajectory data obtained by airborne sensors is time-series,it is not suitable to directly use Tr-Volterra model to predict the target maneuver trajectory.In addition,due to the high dynamics of modern air combat confrontation process and the complexity of electromagnetic environment,there are inevitably a small number of outliers in the target maneuver trajectory data obtained by airborne sensors in real time, which affects the accuracy of online prediction model.
In order to solve the above problems and enhance the prediction performance of Tr- Volterra, in this paper, a new RTrOS-Volterra prediction model based on the idea of sample weighting [36]and online learning theory is proposed.RTrOS-Volterra prediction model realizes online learning by incremental learning,and carries out inverse weighting calculation based on the a priori error of samples in the learning process to reduce the sensitivity of the model to outliers, so as to enhance the stability and antiinterference ability of the algorithm in target maneuver trajectory prediction in complex electromagnetic environment.The model can be expressed as
where, Ψk=diag[φ1,φ2…,φk] is the sample weighting matrix,used to weight different samples.Tk= [t1,t2,…,tk]T, Hk=[h1,h2,…,hk]T.In this paper, this approach is similar to one proposed in Ref.[36].Based on the prior prediction error of the current sample,the inverse weighting calculation is carried out to suppress the large disturbance error caused by outlier samples, so as to reduce the adverse impact of outliers on the prediction model,that is, the weight of the current learning sample is set as
where,ek=tk-hk(xi)·Pkis the prior prediction error of the current sample.In order to avoid φibeing greater than one,the value of φiis modified as follows:
In order to improve the prediction performance of target maneuver trajectory in high dynamic combat environment,combined with the idea of weighted recursive least square method, in this paper,the online prediction form of TrOS-Volterr model is deduced.Solving Eq.(41), the expression of Volterra series kernel function system can be obtained
In the process of air combat,the model parameters are updated with the new datacontinuously obtained by airborne sensors
where, φk+1is the weight matrix of new data.By solving Eq.(45)and Eq.(46), Kk+1can be decided.
The second half of Eq.(46) can be expressed as
Plug Eq.(47) and Eq.(48) into Eq.(46), and the update expression of Volterra series kernel function coefficients can be obtained
For now, the construction process of online prediction model based on RTrOS-Volterra has been completed, and the specific algorithm flow is shown in Algorithm 1.
Algorithm 1.Online prediction model based on RTrOS-Volterra
Input:Doldthe historical target maneuvering trajectory dataset.Dold= (,),k= 1,2,…,N
4.Output: the online prediction mode constructed by TrOSVolterra
Phase 1: The phase of transfer learning.
Calculate Psbased on Doldaccording to Eq.(32)
Combined with transfer learning theory and Pscalculated by using historical data, the Ptis calculated according to Eq.(40)
Phase 2: The phase of online learning.
Using the Volterra series kernel function coefficients calculated by transfer learning as the initial weights in the online learning stage.
Update φiaccording to Eq.(43).
Update Mk+1according to Eq.(50).
Update Pk+1according to Eq.(51).
Return:The Online prediction model constructed by TrOSVolterra.
5.Air combat target maneuver trajectory prediction model based on RTrOS-Volterra and adaptive integrated learning strategy
Ensemble learning is a machine learning method that uses a series of basic learners to learn,and integrates the learning results of each basic learner according to certain rules, so as to obtain a better learning effect than a single basic learner.In order to further improve the performance of the air combat target maneuvering trajectory prediction model based on RTrOS-Volterra,an air combat target maneuvering trajectory prediction model based on adaptive dynamic integration is proposed by introducing the integrated learning theory and combining the maneuvering characteristics of the target.The model mainly improves the performance of the air combat target maneuver trajectory prediction model by implementing the basic prediction model set adaptive update strategy,the basic prediction model parameter adaptive update strategy and the basic prediction model weight adaptive strategy.
5.1.The segmentation point recognition model for air combat target maneuvering action
Air combat is a complex and highly dynamic confrontation process.The situation of air combat is changing rapidly and has obvious time-varying characteristics.In order to better track the real-time changes of target maneuver characteristics, combined with the recognition results of target maneuver segmentation points, in this paper, according to the recognition results of target maneuver segmentation points, the basic prediction model set is adjusted in real time,so as to improve the prediction performance of air combat target maneuver trajectory.
The maneuvering trajectory of air combat target is composed of a series of continuous maneuvers.Therefore, the segmentation of target maneuver trajectory can be transformed into the segmentation between the basic maneuvers of air combat.According to the characteristics of different maneuvers,the maneuvers of air combat targets are divided into three categories, including maneuvers in horizontal plane, maneuvers in vertical plane and maneuvers in space.In order to better describe each kind of maneuver, the dynamic model and dynamic equation of target maneuver can be expressed as Ref.[37].
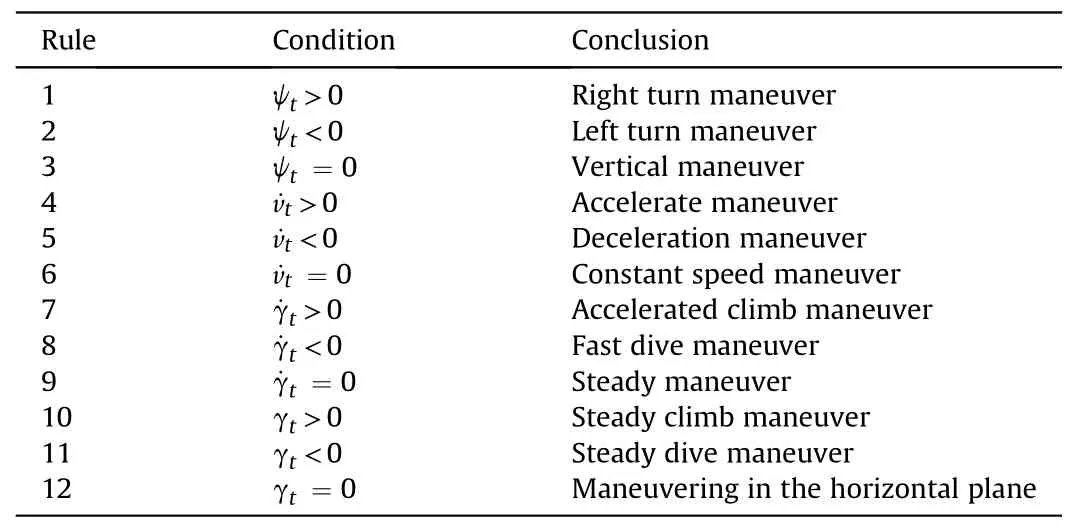
Table 1The recognition rules of maneuvering actions of air combat targets.
where (xt,yt,zt) denotes position in inertial coordinates.,t,are the change rates of the velocity,track pitch angle and yaw angle of fighter,respectively.grepresents gravitational acceleration.(nxt,nzt,φt) are the tangential and normal overloads and roll angle,respectively.In general,(xt,yt,zt,vt,γt,ψt) and.
(nxt,nzt,φt) Denote the state variables and control variables.According to the kinematic model, state variables and control variables of target maneuvering trajectory,the maneuvering trajectory of air combat target can be divided into 45 maneuvering modes.The specific parameter settings as shown in Ref.[37].According to the parameter settings of 45 maneuver modes,the target maneuver recognition rules shown in Table 1 can be obtained.
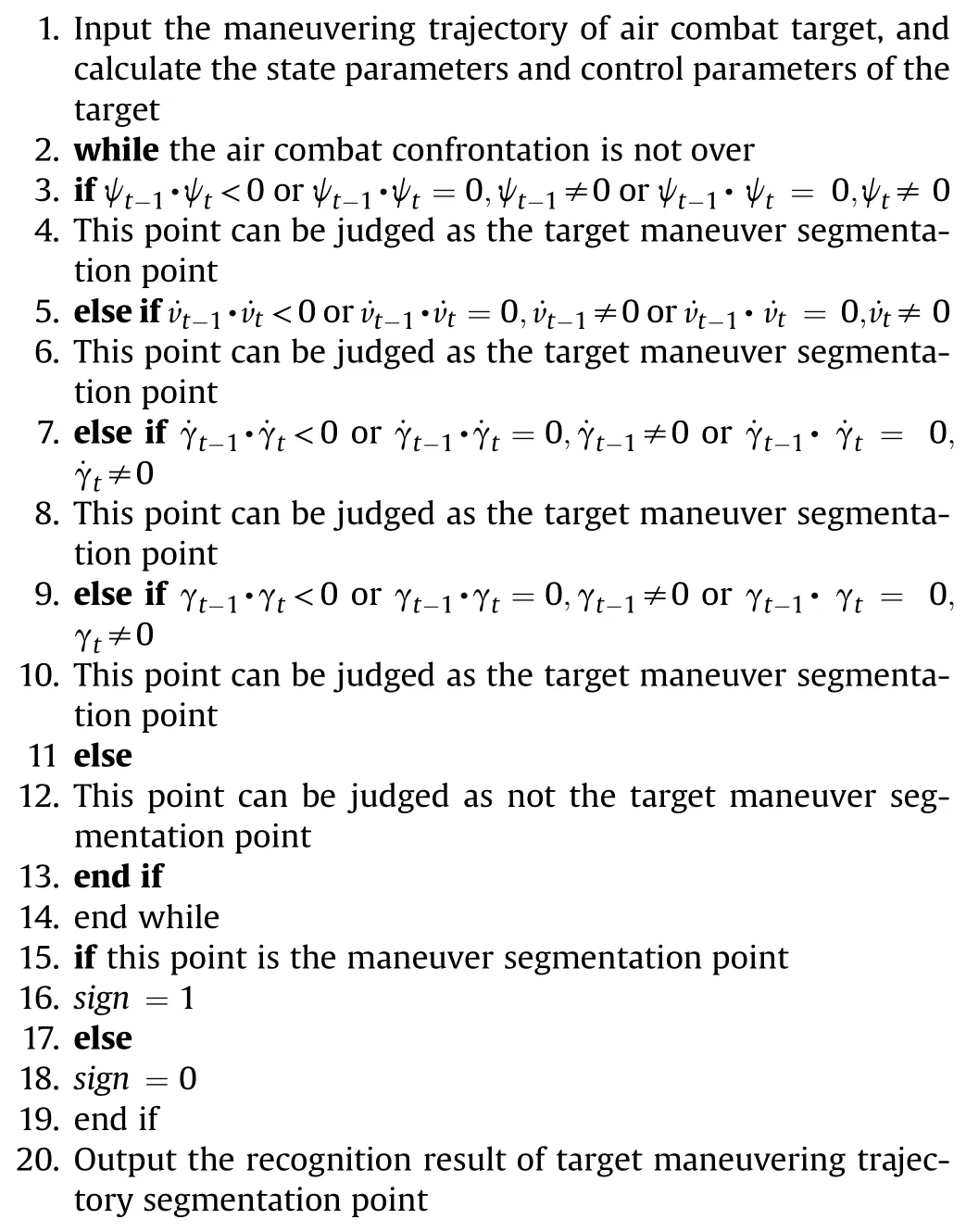
In general, the maneuvering trajectory of a target can be composed of a series of action units.According to the maneuvering action recognition rules of air combat targets in Table 1, the maneuvering trajectory of target should be segmented by some rules.As you can see in Table 1, the characteristics of every maneuver action unit have been summarized as the rules of segment.Due to variety of maneuver action unit parameter characteristics,the conditions that the flight maneuver action cannot be segmented are described.If only the change of parameters does not meet to the conditions, the current point of flight represents segment point.The specific recognition method is shown in algorithm 2.Meanwhile, the conditions can be given as follows.
Algorithm2.:Thesegmentation point recognition algorithm for maneuvering action of air combat target
5.2.Adaptive updating strategy of model weight based on prediction performance
In this paper, the basic predictor of the target maneuver trajectory prediction model based on AERTrOS-Volterra is constructed by using RTrOS-Volterra.In the initialization stage of the model,the weight of each basic predictor is initialized to the same value, and an initial integrated prediction system is constructed.In order to ensure the overall performance of the ensemble prediction model,the weights of each basic predictor need to be adaptively updated according to their corresponding prediction accuracies over the acquisition of real-time data.The principle of adaptive updating of model weight is that the model with superior performance generally possess heavier weights.For the sake of description,some relevant definitions are listed as follows.
Suppose the given training sample set, where xt∈Rrandyt∈R, and the size of the time window isT0<T.Suppose that the integrated model setMeconsists ofMmaxRTrOSVolterra models.whereMe= {f1,f2, …,fMmax},fmrepresents a basic RTrOS-Volterra model.When initializing the integrated model setMe,each model is trained by using the training samples in the data time windowSt.When the RTrOS-Volterra model predicts a sample (xt,yt), the prediction errorcan be expressed as,whereis the output of the prediction model.In each time stept, the cumulative prediction errorof the model is obtained as
where, the parameterlifemis associated tofmwhich denotes the total number of online predictions performed byfm.Based on the cumulative error of the model, the adaptive weight of each basic predictor can be obtained
5.3.Air combat target maneuver trajectory prediction model based on AERTrOS-Volterra algorithm
In this paper, based on the adaptive ensemble learning algorithm and RTrOS-Volterra prediction model, an AERTrOS-Volterra target maneuvering trajectory prediction model that can adapt to the highly dynamic air combat environment is proposed.The realization process of air combat target maneuver trajectory prediction based on aertros Volterra algorithm can be divided into two parts.In the first part of the prediction model,based on the transfer learning theory, the information contained in the historical trajectory data of air combat confrontation is extracted and transferred to the current prediction task as prior knowledge.On this basis, multiple basic predictors with the same initial weight are constructed, and the initial ensemble prediction model is constructed through these weighted basic predictors.In the second part of the prediction model, with the continuous acquisition of real-time data of target maneuver trajectory, the weights and parameters are updated adaptively combined with the prediction performance of the model.At the same time, according to the prediction performance of the integrated system and the recognition results of target maneuver segmentation points, the basic predictor with the worst performance in the integrated system will be replaced by the newly trained model.The specific implementation process of AERTrOS-Volterra algorithm is shown in algorithm 3.
Algorithm3.The learning process of AERTrOS-Volterra algorithm
Input:A data setS=; window's sizeT0<T; basic predictor based on RTrOS-Volterra prediction model; the umber range of basic predictors contained in the integrated model set[Mmin,Mmax],and.Mmax≥Mmin>1
Creating a pool ofMmaxmodels.
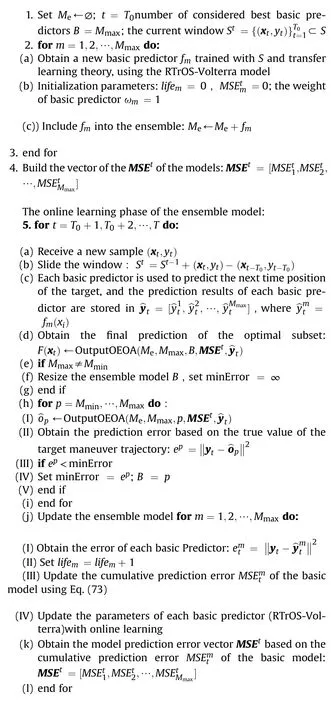
Based on Algorithm 3,determine whether the data point is the segmentation point of the maneuvering trajectory of the air combat target,and obtain the value of.Sign
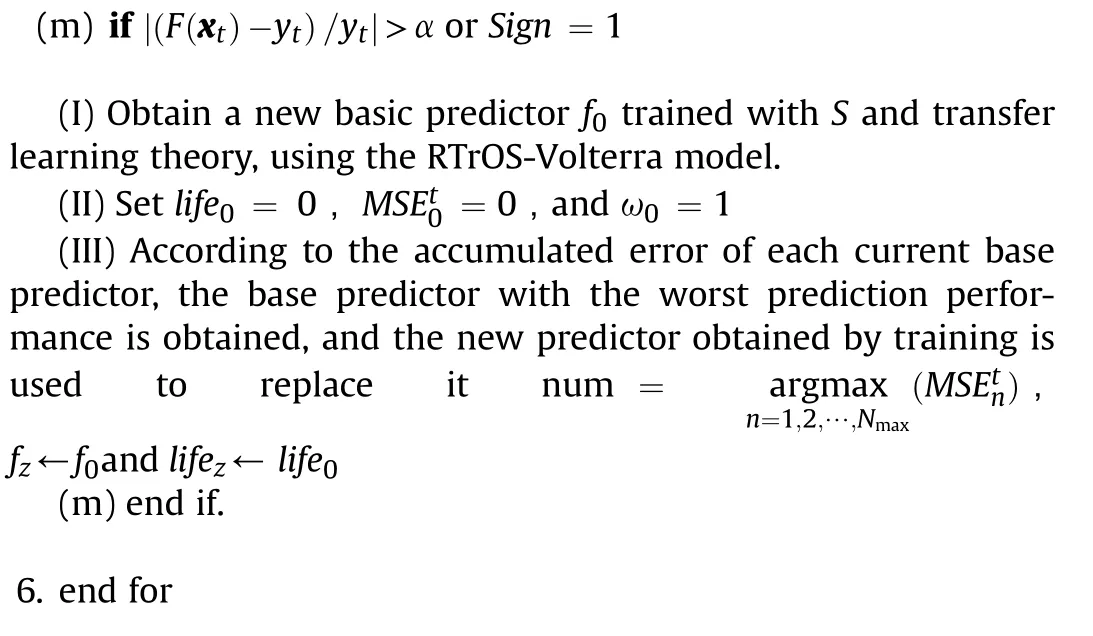
In step 2, a pool ofMmaxmodels is initialized with the sample data in the initial time windowand the RTrOSVolterra model.When a new data (xt,yt) is received, the time window will move in the direction of the new data, remove the oldest sample data in the time window, and keep the data in the time window the target maneuver trajectory data at the latest time.In step 5 d,the position of the target at the next time predicted by the optimal prediction sub integration model composed ofBbasic predictors is obtained.The specific operation steps are shown in algorithm 4, and the flow chart is shown in Fig.1.
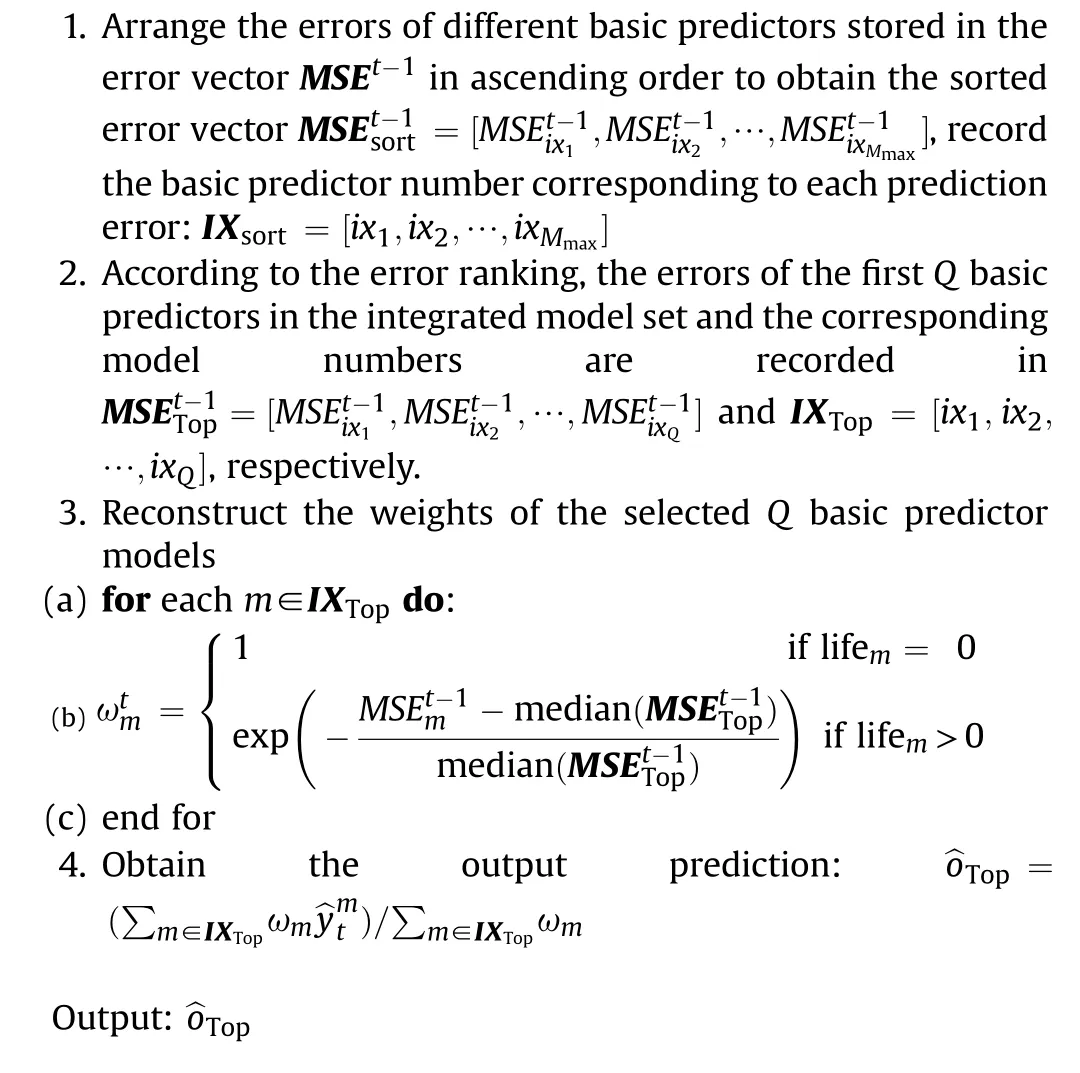
Algorithm 4.OutputOEOA :output prediction based on the ordered aggregation of the best models
Input:EnsembleMeMmaxQMSEt-1,
6.Simulation verification and analysis
The experiments have been performed on the Matlab 2021 environment,running on a PC equipped with an Intel Core i7 3 GHz processor of 4 cores and 8 GB of RAM.
6.1.The source of experimental data
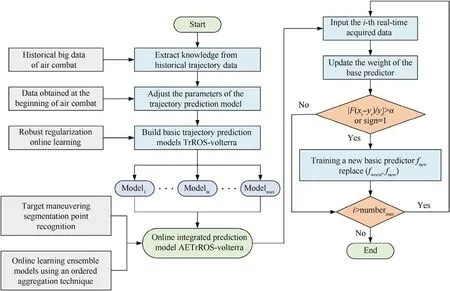
Fig.1. The flow chart of AERTrOS-Volterra prediction algorithm.
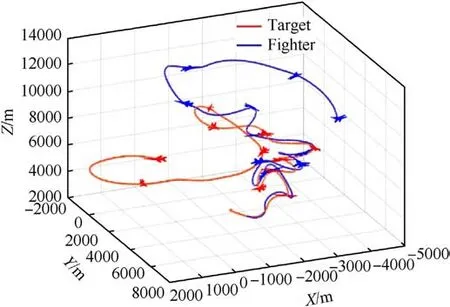
Fig.2. The partial air combat confrontation trajectory.
In this paper, the countermeasure training data extracted from the air combat simulation countermeasure system is used as the training and test sample data of the algorithm.The data includes the three-dimensional coordinatex,y,zof the target at the recording time and the data of pitch angle and yaw angle.Some air combat confrontation trajectories are shown in Fig.2.
6.2.Experimental settings
To better compare performances of different algorithms, four measurements,i.e.,root mean square error(RMSE),mean absolute deviation, (MAD), mean absolute percentage error (MAPE), and normalized mean square error(NMSE) are adopted in our work to evaluate the prediction accuracies.The simulation results of each group are the average results of 20 independent experiments.Mathematical expressions of RMSE, MAD, MAPE and NMSE are presented as follows:
In order to evaluate the performance of air combat target maneuver trajectory prediction model based on AERTrOS-Volterra algorithm.In this paper, the performance of the algorithm is compared and analyzed from four perspectives.
(1) The air combat target maneuver trajectory prediction problem is essentially a time series prediction problem.In order to verify the adaptability of the prediction model proposed in this paper, the typical chaotic time series Mackey-Glass,Lorenz and Rossler datasets are used to verify the effectiveness and robustness of the RTrOS-Volterra prediction model integrated with transfer learning, online learning and regularization mechanism.
(2) In order to illustrate the necessity of choosing Volterra series[38]as the basic predictor to improve the integrated prediction model, the prediction performance of this algorithm is compared with GRU [39], ELM [40], KELM [41]and LSTM [42]algorithms.
Target maneuver trajectory prediction is a time series prediction problem in essence.There are two methods to solve this problem,namely model driven method and data driven method.In recent years,data-driven methods have been widely used in practical time series prediction due to their advantages of convenience and high efficiency.In the data-driven time series prediction method, machine learning algorithm is widely used in data mining, speech recognition and time series prediction due to its powerful data processing ability.Therefore, in this paper, ELM model and KELM model, which belong to shallow machine learning algorithm, and GRU model and LSTM model, which belong to deep learning, are used as comparison algorithms when comparing the prediction performance of basic predictor models.
(3) AERTrOS-Volterra prediction model is an ensemble algorithm,the improvement of prediction model performance is the result of transfer learning, Volterra model, online learning and improved ensemble learning algorithm.In addition, to present the role of individual parts of AERTrOSVolterra,Volterra、Tr-Volterra、OS-Volterra、TrOS-Volterra、TrEnOS-Volterra [43]and AERTrOS-Volterra are also utilized for contrast.
(4) In order to verify the performance superiority of the proposed improved ensemble learning algorithm based on target maneuvering characteristics, the improved adaptive ensemble prediction model is compared with TrEnOSVolterra, TrEnOS-KELM [44], DOER-TrOS-Volterra [45], EOSTrOS-Volterra [46], AdaBoost.RT-TrOS-Volterra [47]and OEOA-TrOS-Volterra [48].
The target maneuver trajectory prediction based on a single learning model belongs to a global modeling method,which makes the model complex and easy to fall into local optimum.Compared with a single learning machine, an ensemble learning algorithm that integrates multiple learning machines can often achieve higher prediction accuracy.In recent years, ensemble learning has been increasingly applied to time series forecasting problems.Compared with a single learning machine, an ensemble learning machine can often achieve higher prediction accuracy.According to the different timing of base learner ensemble,it can be divided into two categories: static ensemble and dynamic ensemble.Static integration refers to integrating those base learners with the best prediction effect according to a fixed combination method when training a learner; dynamic integration does not have a fixed combination method of base learners.Basic learner.In order to more comprehensively compare the performance of the improved dynamic ensemble algorithm in this paper, the static ensemble AdaBoost.RT-TrOS-Volterra algorithm and the weighted ensemble EOS-TrOS-Volterra algorithm, and the dynamic ensemble TrEnOSVolterra, TrEnOS-KELM, DOER-TrOS-Volterra, OEOA-TrOS-Volterra as comparison algorithms.Comparing the TrEnOS-Volterra and TrEnOS-KELM algorithms is to further illustrate that under the ensemble learning model architecture,the Volterra series as a basic predictor also outperforms the KELM model.
6.3.Experimental results
6.3.1.Effectiveness analysis of algorithm strategy
Chaotic systems are often used to test the performance of nonlinear systems.In this paper,typical chaotic time series Mackey glass, Lorenz and Rossler data sets are used as algorithm training and test samples to verify the effectiveness of the algorithm.The conditions of data generation are completely consistent with Ref.[49].
In order to verify the effectiveness and advancement of the algorithm proposed in this paper, OSELM [50], OSKELM [51], online regularized time series prediction algorithms (i.e., OSRELM [52],OSRKELM[53],RR-OSELM[36])and online regularized time series forecasting algorithms with forgetting factor (i.e., FP-OSELM [54],DFF-OSELM [55], FFOS-RKELM [56], FGR-OSELM [57]), are utilized for contrast.The parameter settings of all algorithms are shown in Table 2,and the number of neurons in the hidden layer of all ELMs is set to 20.
Table 3 presents the prediction results of chaotic time series Mackey glass,Lorenz and Rossler,It can be seen from Table 3 that,in terms of algorithm prediction accuracy, RMSE、MAD、MAPE and NMSE of RTrOS-Volterra is far below those of other methods, the prediction accuracy of the algorithm is significantly better than other prediction algorithms in the literature under the same test data set,hardware platform and algorithm initial parameter setting conditions.In terms of algorithm running time, the results reveal that RTrOS-Volterra is more time consuming when compared to other methods.This is because the high dimension of the kernel function of Volterra series requires more time to compute the optimal solution.Additionally, integrating the related ideas of transfer learning into RTrOS-Volterra requires more processingtime.Compared with the other nine prediction algorithms,RTrOSVolterra can realize the transfer of historical data information.In addition, through the running time of one-step prediction of the algorithm,it can be seen that the one-step running time of RTrOSVolterra prediction algorithm can meet the real-time requirements of time series prediction problems.
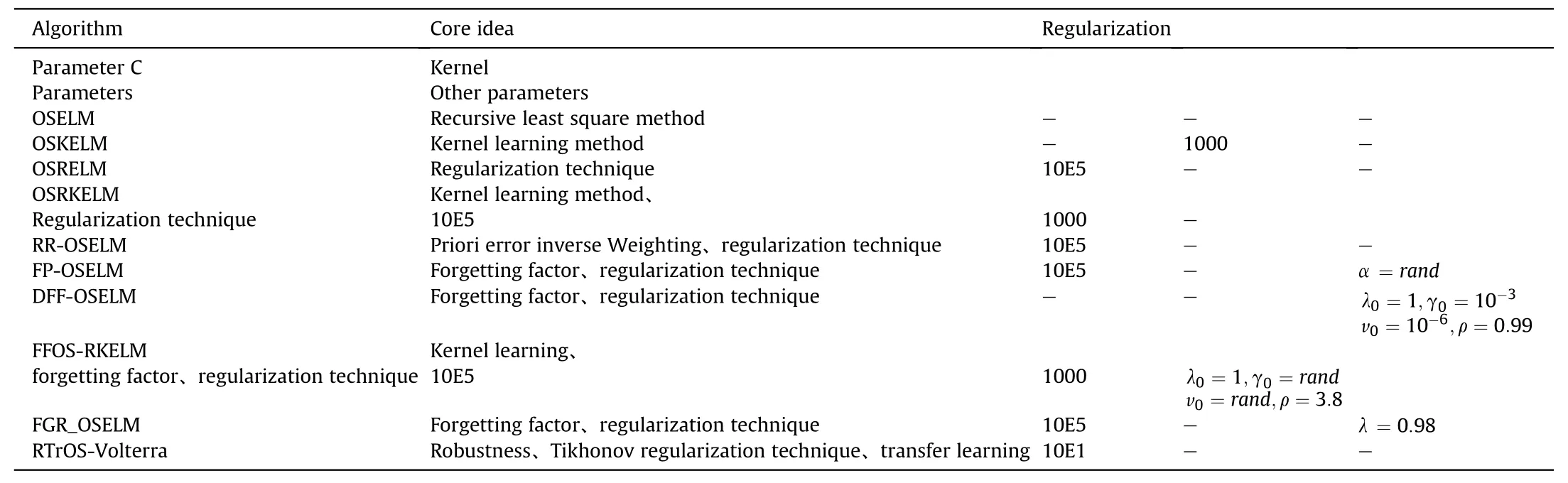
Table 2The prediction parameter settings of time series data.
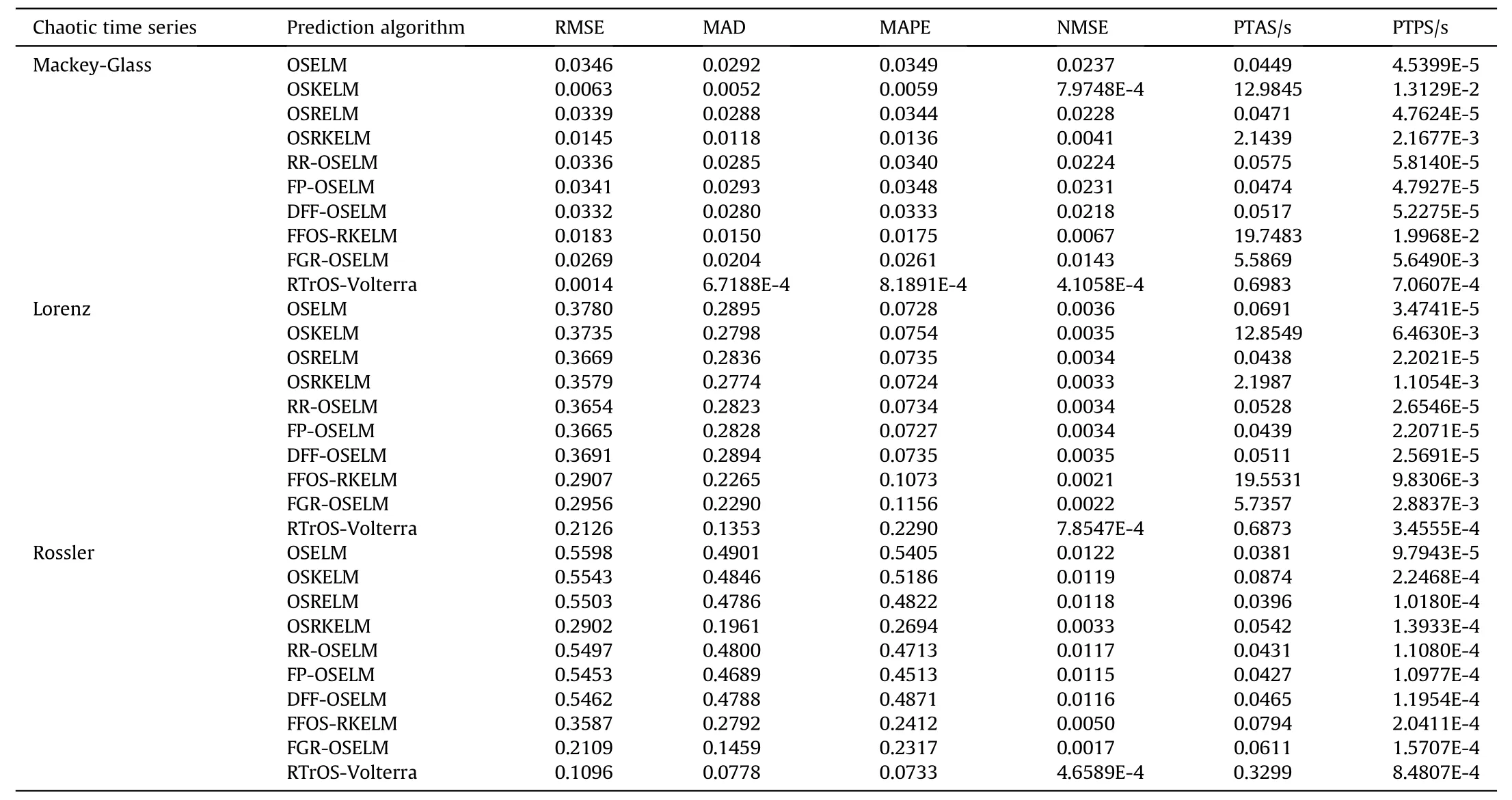
Table 3The single step prediction results of time series data set.
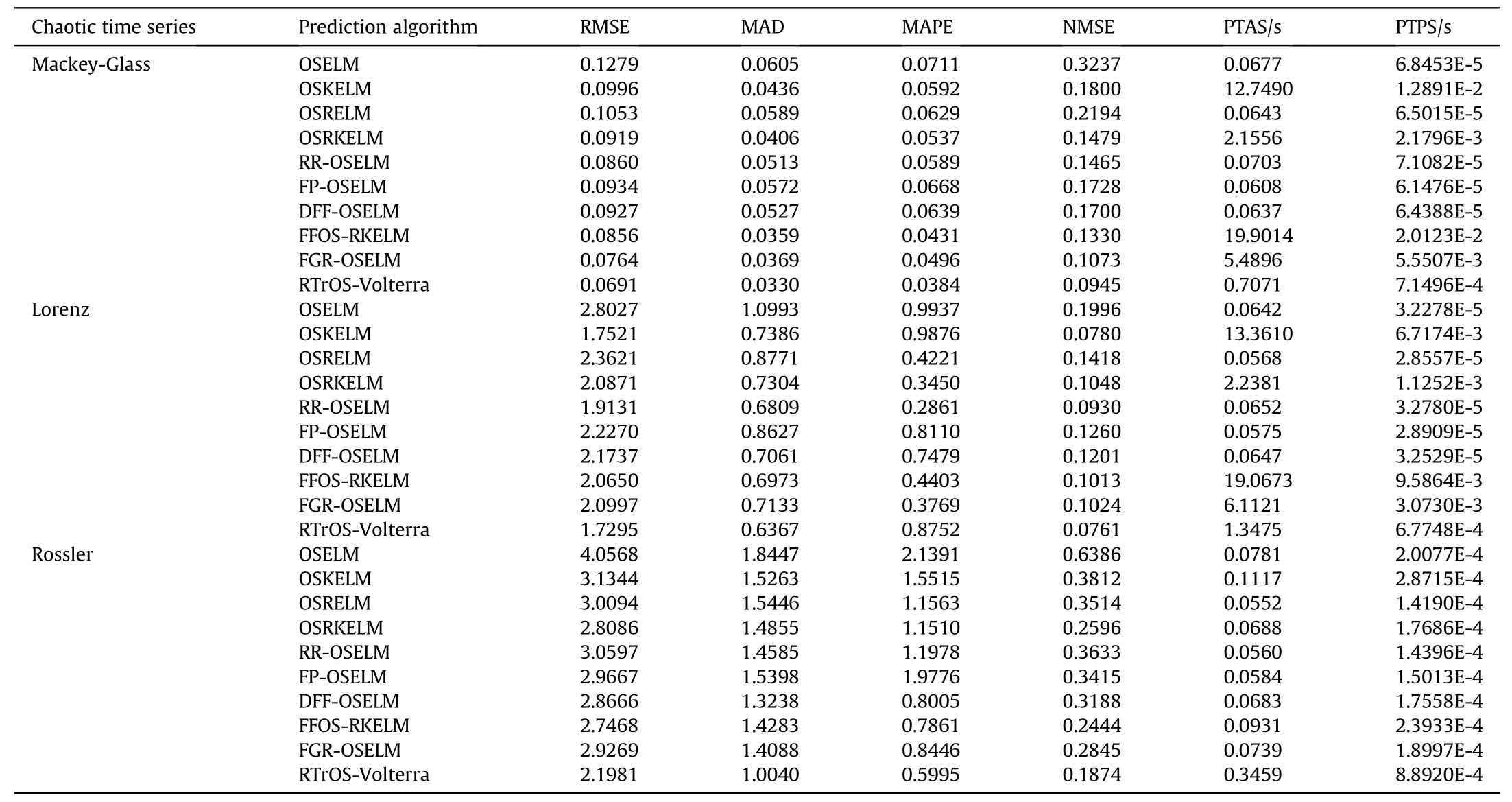
Table 4The One-step prediction results of noise-added time series datasets.
In Table 3,comparing the prediction results of OSELM,OSRELM,OSKELM and OSRKELM algorithms, it can be seen that the regularization and kernel function mechanism can effectively improve the performance of the algorithm.Comparing the prediction results of OSELM and RR-OSELM, FP-OSELM, DFF-OSELM, FFOS-RKELM,and FGR-OSELM algorithms, it can be seen that the prediction accuracy of the original method is improved to a certain extent after adding the forgetting factor.This is because the introduction of forgetting factor enables the model to adjust the proportion of old and new samples in the learning process and reduce the weight of old samples, thereby reducing its adverse impact on the learning process, so as to adapt to the new data faster and improve Predictive performance of the algorithm under time-varying conditions.Thanks to Tikhonov regularization technology, inverse weighted calculation design based on a priori error of samples and the introduction of transfer learning, RTrOS-Volterra has obvious advantages in prediction time and better real-time performance.This is because the introduction of transfer learning can realize the transfer of knowledge from historical data to current prediction task,Regularization technology and robust design can improve the prediction performance and stability of the algorithm.
In addition, to better compare the effectiveness and performance superiority of the RTrOS-Volterra algorithm,the robustness of the algorithm to noisy data is compared through simulation,and the result is illustrated in Table 4.Chaotic time series Mackey glass,Lorenz and Rossler are selected to evaluate the robustness of the algorithm, adding 10% noise to all samples of the three data sets.The noise addition method is as follows[58]:calculate the standard deviation σ of each dimension of the data of the test sample, therandom number satisfying theN(0,σ)distribution is generated and superimposed on the corresponding dimension of the sample data.
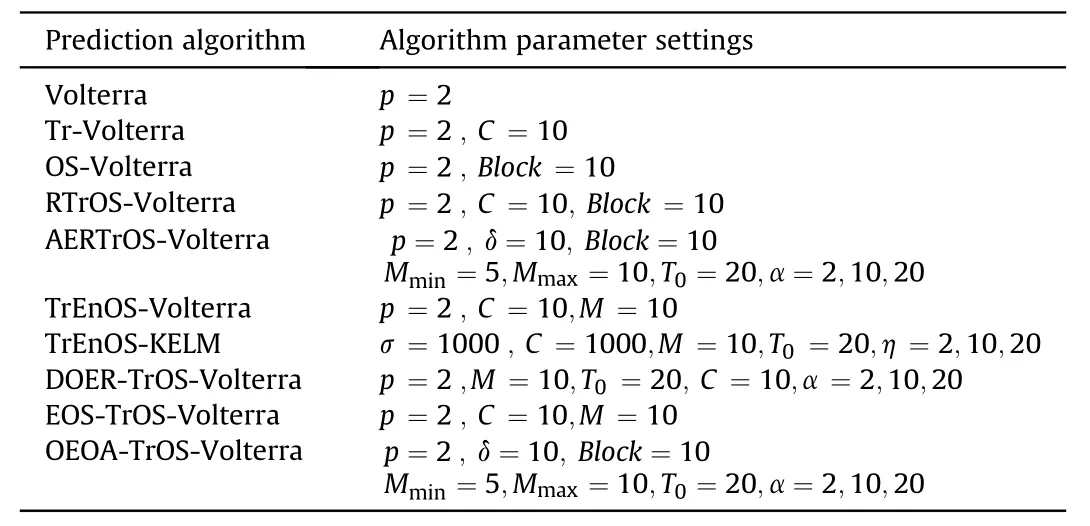
Table 5The algorithm and its parameters setting.
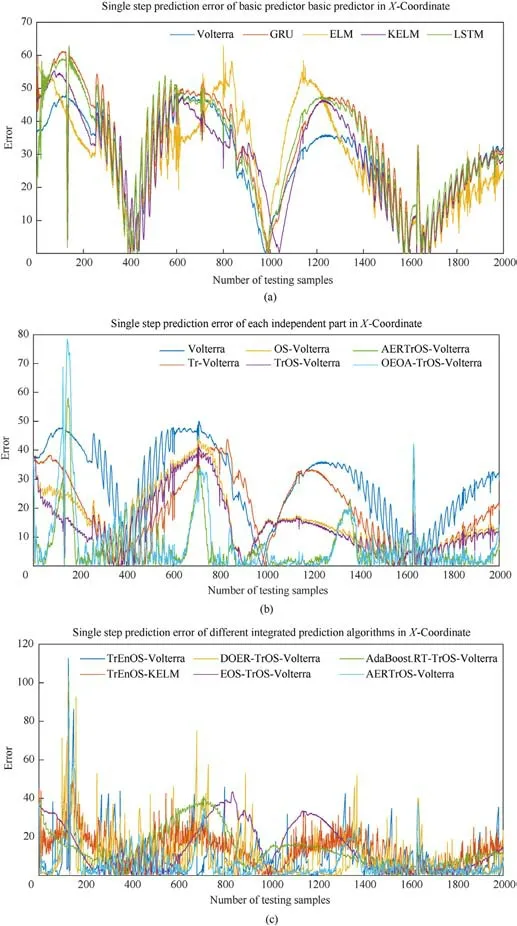
Fig.3. The single step prediction results of X coordinate:(a)Comparison of single-step prediction errors of the base predictor;(b)Comparison of single-step prediction errors of each independent component; (c) Comparison of single-step prediction errors of ensemble prediction algorithms.
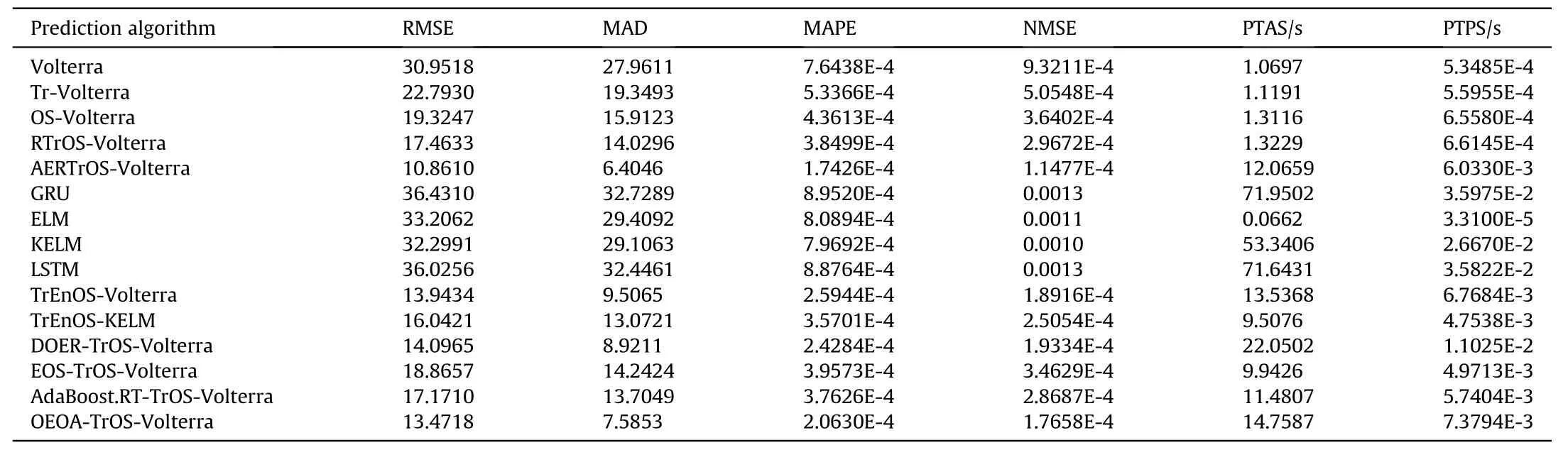
Table 6The single step prediction results of X coordinate.
Table 4 presents the prediction results of Mackey glass, Lorenz and Rossler chaotic time series with noise.It can be seen that the RTrOS-Volterra prediction algorithm can still maintain high prediction accuracy when adding noise, and its performance is significantly better than other prediction methods.The robustness of the algorithm proposed in this paper is verified.Comparing the prediction results of the OSELM, OSRELM, OSKELM, OSRKELM algorithms and the RR-OSELM,FP-OSELM,DFF-OSELM,FFOS-RKELM,FGR-OSELM algorithms, it can be seen that after adding forgetting factor,the original method can effectively deal with outliers in the data Under the condition of noise, so as to improve the prediction performance of the algorithm.
6.3.2.Simulation analysis of air combat target maneuvering trajectory prediction
Target maneuver trajectory prediction is a key technology in the research of intelligent air combat decision-making.It is the basis of air combat target threat assessment, situation awareness and maneuver decision-making.The air combat target maneuver prediction problem is essentially a time series real-time prediction problem with nonlinear and time-varying characteristics.In addition, due to the complexity of the air combat electromagnetic environment, the data obtained by the airborne sensors are noisy.In order to accurately predict the future maneuvering trajectory of the target, on the basis of RTrOS-Volterra, combined with the integrated learning algorithm and the target maneuvering segmentation point recognition algorithm, an air combat target maneuvering trajectory prediction model based on the AERTrOSVolterra is proposed.In order to verify the effectiveness and robustness of the target prediction model proposed in this paper,the prediction performance of the algorithm is tested based on the target maneuver trajectory data stored in the air combat countermeasure simulator.The parameter settings of the algorithm are shown in Table 5.The parameter settings of GRU [39], ELM [40],KELM[41]and LSTM[42]are consistent with those in the literature.
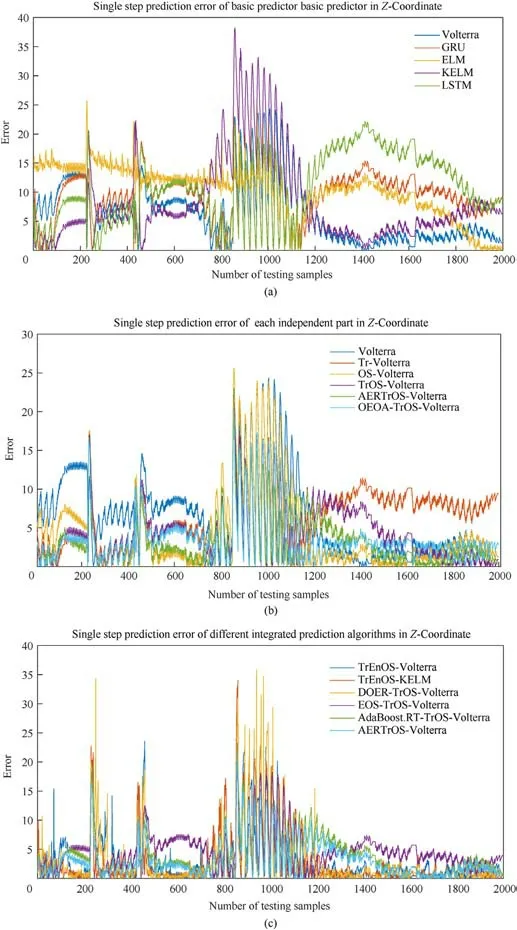
Fig.5. The single step prediction results of Z coordinate:(a)Comparison of single-step prediction errors of the base predictor;(b)Comparison of single-step prediction errors of each independent component; (c) Comparison of single-step prediction errors of ensemble prediction algorithms.
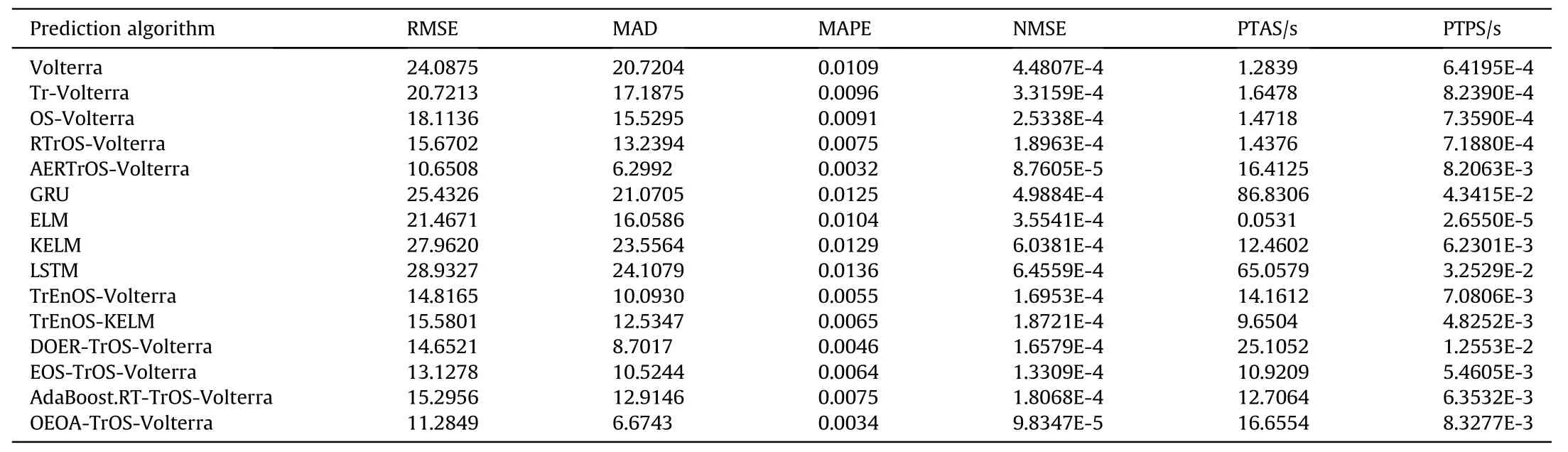
Table 7The single step prediction results of Y coordinate.
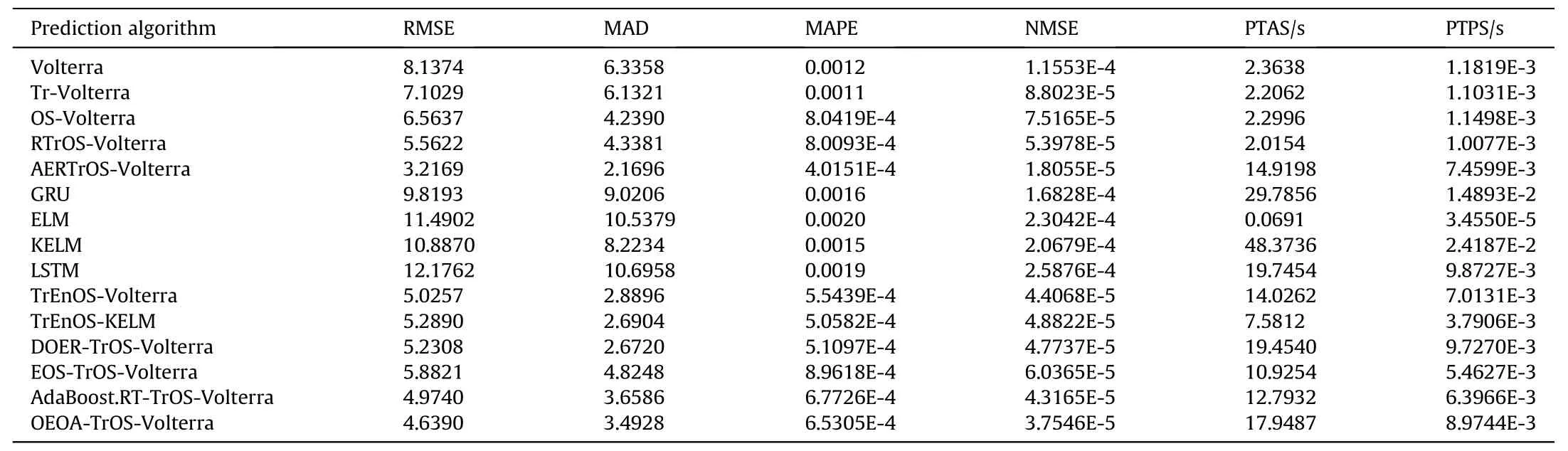
Table 8The single step prediction results of Z coordinate.
In order to reduce the accidental error of the prediction algorithm, the prediction result of each algorithm is the average result obtained by 20 repeated experiments.The results of single-step prediction of target maneuver trajectory by different algorithms are shown in Table 6-Table 8.In order to more intuitively compare the prediction performance of different algorithms on the target maneuvering track, the absolute error values of single-step prediction of different algorithms are shown in the form of charts, as shown in Fig.3, Fig.4 and Fig.5.
(1) The single step prediction results of X coordinate
(2) The single step prediction results ofYcoordinate
(3) The single step prediction results of Z coordinate
To reduce the accidental errors, individual experiments are respectively repeated for 20 times over each dataset.RMSE, MAD,MAPE,NMSE,the processing time on all samples(PTAS)in minutes,and processing time per sample (PTPS) values of different algorithms are separately listed in Tables 6 and 7 and Table 8.In addition,to intuitively compare the performances of different methods,figures of the absolute predict errors are drawn for all the methods mentioned above.From figures showing predict errors and the performance evaluation index, we can draw the following conclusions:
(1) Comparing the prediction performance indicators of Volterra, GRU, ELM, KELM and LSTM, it can be seen that the single-step prediction performance of Volterra series is better than other basic predictors, and has good real-time performance.The time required for single-step prediction meets the requirements of air combat for the real-time performance of the algorithm.In addition, combined with the performance evaluation index shown in Fig.3-Fig.5, it can be seen that the prediction performance of Volterra series is more stable than the other four basic prediction algorithms.Although the ELM has the best real-time performance, the prediction performance fluctuates sharply, which is not conducive to air combat decision-making.This is because elm input weight and threshold are generated randomly,the performance of the algorithm is random.
(2) Comparing the prediction performance indicators of Volterra, Tr-Volterra, OS-Volterra, TrOS-Volterra, OEOA-TrOSVolterra and AERTrOS-Volterra and combining the absolute error shown in Fig.3-Fig.5, it can be seen that transfer learning, online learning, ensemble learning and target maneuvering segmentation point recognition algorithms are conducive to improving the prediction performance of the algorithm.This is because transfer learning extracts the effective knowledge contained in the historical data to assist the current prediction task, online learning can update the model parameters in real time according to the obtained new data to adapt to the current data characteristics, ensemble learning can select the basic predictor with better performance for the current prediction task, target maneuver segmentation point recognition algorithm can improve the ability of the prediction algorithm to perceive the trend of data changes.
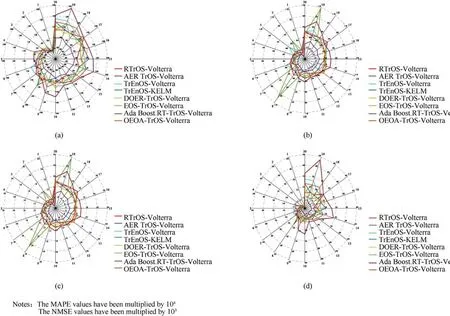
Fig.6. Comparison of the average performance index of single-step prediction of X coordinate under different noise levels: (a) RMSE; (b) MAD; (c) MAPE; (d) NMSE.
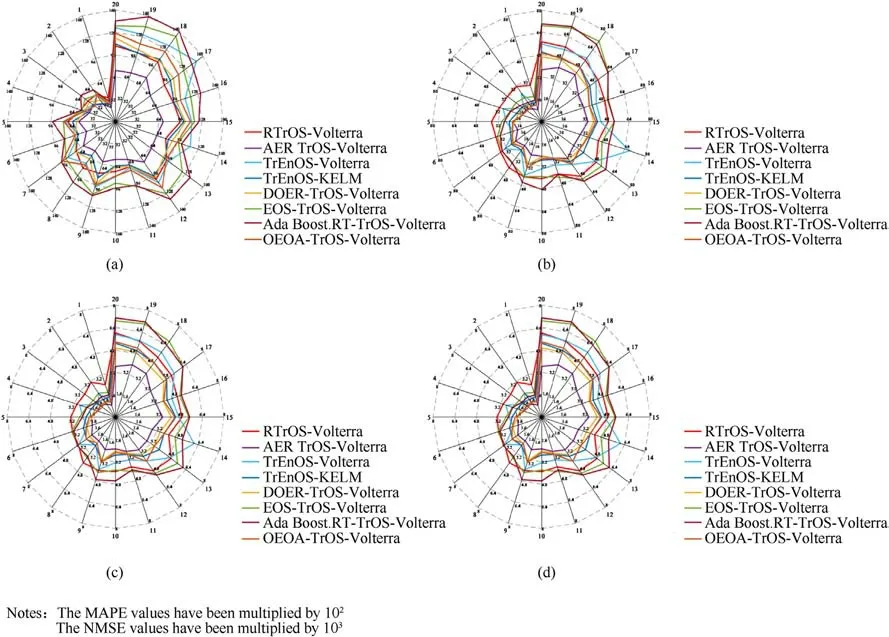
Fig.7. Comparison of the average performance index of single-step prediction of Y coordinate under different noise levels: (a) RMSE; (b) MAD; (c) MAPE; (d) NMSE.
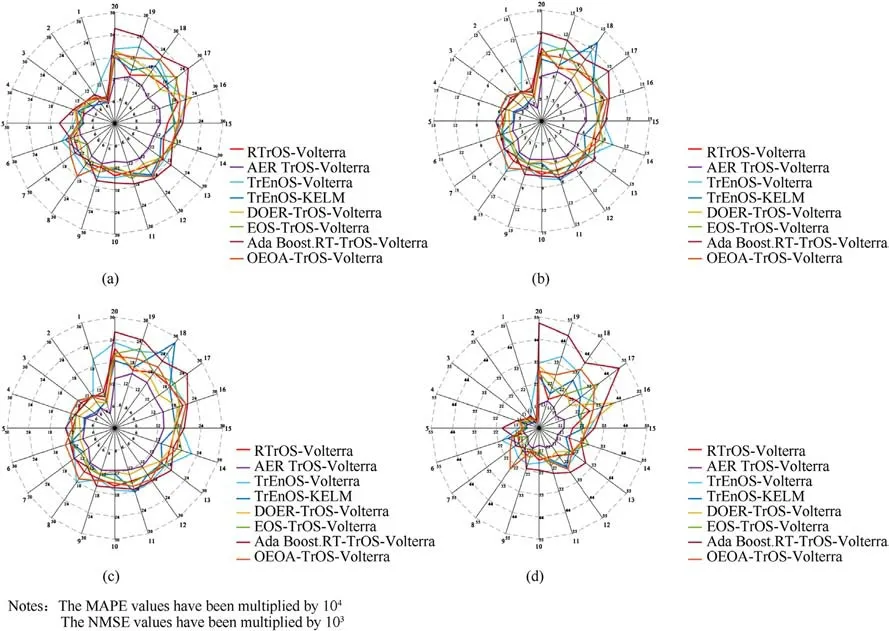
Fig.8. Comparison of the average performance index of single-step prediction of Z coordinate under different noise levels: (a) RMSE; (b) MAD; (c) MAPE; (d) NMSE.
(3) Comparing the prediction performance indicators of TrEnOSVolterra, TrEnOS-KELM, DOER-TrOS-Volterra, EOS-TrOS-Volterra, AdaBoost.RT-TrOS-Volterra and AERTrOS-Volterra, it can be seen that the one-step prediction performance of AERTrOS-Volterra is significantly better than other ensemble prediction algorithms, which shows that the improved ensemble algorithm based on target maneuvering segmentation point recognition algorithm can improve the prediction performance of the algorithm.This is because the improved integration algorithm can better perceive the changes of the statistical characteristics of the time series of the target maneuver trajectory, so as to update the parameters of the algorithm in real time to improve the prediction performance.
6.3.3.Robustness evaluation of aertros volterra algorithm
In order to verify the robustness of the AERTrOS-Volterra algorithm to noise data when it is applied to target maneuver trajectory prediction, in the target maneuver trajectory test sample, noise is added to the three-dimensional coordinate data in the order of the number of noise points.The noise addition method is as follows[58]: calculate the standard deviation σ of each dimension data of target maneuver trajectory, the random number satisfying the distributionN(0,σ) is generated and superimposed on the corresponding dimension of the sample data, while keeping the real value of the test sample data unchanged.The experimental results are shown in Fig.6, Fig.7 and Fig.8.
As can be seen from Fig.6, Fig.7 and Fig.8, with the increase of noise data points, the performance of the prediction algorithm shows a downward trend as a whole, and the variation ranges are different.The performance of AERTrOS-Volterra algorithm changes relatively gently, which shows that the prediction performance of the algorithm is relatively stable in noise environment.At the same time, it can be seen that the prediction performance of AERTrOSVolterra algorithm on the three-dimensional coordinate axis of target trajectory is the best under different noise levels, indicating that AERTrOS-Volterra algorithm is robust, this is because the robust regularization technology based on inverse weighting of prediction error is introduced into the algorithm,which can better deal with the problem of target trajectory prediction in noisy environment.In addition,by comparing the curves shown in Fig.6,Fig.7 and Fig.8, it can be found that the performance of AERTrOSVolterra algorithm is better than that of RTrOS-Volterra algorithm, indicating that the introduction of ensemble learning can also improve the robustness of the algorithm.
7.Conclusions
In this paper, a hybrid algorithm based on transfer learning,online learning, ensemble learning, regularization technology,target maneuvering segmentation point recognition algorithm,and Volterra series,called AERTrOS-Volterra is put forward for the time series prediction of air combat target maneuvering trajectory.Compared with the existing air combat target maneuver trajectory prediction methods,AERTrOS-Volterra algorithm makes full use of the historical trajectory data generated by air combat confrontation, and excavates effective prior knowledge based on transfer learning to assist the current prediction task.However, with the increasing complexity of air combat electromagnetic environment,there are some outliers in the target trajectory data obtained by airborne sensors.In order to improve the robustness and anti-noise ability of the algorithm, a regularization technology based on inverse weighting of prediction error is integrated into the prediction model.At the same time, in order to deal with the real-time acquisition of target data by airborne sensors, the relevant ideas of online learning are applied to the algorithm, so that the model can be updated online.In the integrated system,in order to ensure the overall performance, an update method is designed for the model weights, and the target maneuver segmentation point recognition algorithm is introduced, so that the basic predictor weights will be adaptively updated based on their performance and the basic predictor parameters will be updated in real time.In conclusion, the algorithm attempts to build an integrated transfer online learning framework for the air combat target maneuver trajectory prediction problem, which transfers the knowledge in the air combat historical trajectory data to the current task, effectively solving the problem that the traditional prediction model does not satisfy the same distribution of training data and real-time prediction data.condition.
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
The authors gratefully acknowledge the support of the Fundamental Research Funds for the Air Force Engineering University under Grant No.XZJK2019040.

- Defence Technology的其它文章
- Mechanical behavior of entangled metallic wire materialspolyurethane interpenetrating composites
- Investigation on thermal characteristics and desensitization mechanism of improved step ladder-structured nitrocellulose
- 2D metal-organic frameworks endow ammonium perchlorate with enhanced thermal effect
- Thermal decomposition effect of MgCo2O4 nanosheets on ammonium perchlorate-based energetic molecular perovskites
- UAVs cooperative task assignment and trajectory optimization with safety and time constraints
- Modification of SDOF model for reinforced concrete beams under close-in explosion