基于可拓决策法的车辆自适应避撞控制方法研究1)
2023-02-25 02:25:06赵万忠王春燕
力学学报 2023年1期
陈 翔 程 硕 赵万忠 王春燕 蒋 睿
* (南京航空航天大学能源与动力学院,南京 210016)
† (东京大学生产技术研究所,日本东京 153-0041)
引言
近年,由于交通流密度的迅速扩增,交通事故已成为一个重大的社会问题,全世界每年有多达5000 万人因道路交通事故受伤,120 多万人死亡[1].因此,车辆主动安全技术备受关注,许多人在该方向已经进行了大量研究[2-4].车辆碰撞是交通事故中最常见的一种,而避撞控制可以有效地避免或缓解车辆碰撞事故.此外,近年来,随着先进控制系统和导航技术的发展[5],自动驾驶汽车得到了汽车行业的重点关注[6-7].一些高级辅助驾驶系统(advanced driver assistance system,ADAS),如电子稳定性控制系统(electronic stability control,ESC)[8-9]、自适应巡航控制系统(adaptive cruise control,ACC)[10]、自动紧急制动系统(autonomous emergency brake system,AEB)[11]、主动前转向系统(active front steering control,AFS)[12-13]和车道保持辅助系统(lane keeping assistance system,LKA)[14]等.避撞控制是自动驾驶汽车安全系统中最重要的控制之一.因此,有必要对避撞控制进行广泛而深入研究.
近年来,许多研究人员将工作重点放在了避撞控制上,避撞控制很快进入了实用阶段.AEB 是避撞控制系统的一项主要功能,可在车辆处于潜在碰撞危险时激活.态势评估是碰撞系统的关键问题之一,它可以估计碰撞风险.通常,碰撞时间(time to collision,TTC)用于测量碰撞障碍物的潜在危险,一旦TTC 小于其设计阈值,AEB 可以激活制动系统[15-16].Jhonghyun 等[17]基于神经网络集成设计一种新的态势评估算法来确定碰撞概率.Lu 等[18]设计一种同时考虑前后车辆的协调制动控制策略,以避免或减轻多辆车纵向碰撞的影响.Lee 等[19]开发一种先进的AEB 控制系统,该系统通过使用阻抗控制的概念测量到前方车辆和后方车辆的距离来缓解多车情况下的碰撞.Santos 等[20]提出一种新的具有避撞功能的轨迹跟踪控制器,并设计一个正势函数来考虑障碍物的运动.此外,Ji 等[21]提出一个规划和跟踪框架,而不是紧急制动,以避免障碍物碰撞.然而,由于环境感知的难度和责任归咎的问题,转向避撞系统在最近几年可能很难进入实用阶段[11].
避撞控制的难点在于如何确保其在各种路况下的有效性[22].众所周知,复杂的路况对制动距离会产生很大的影响.此外,有关轮胎-路面附着系数的准确获取对许多其他主动车辆安全控制有非常重要的作用,例如偏航稳定性控制和牵引力控制等.因此,许多人都把重点放在了关键参数的观测算法上.Rajamani 等[23]使用递归最小二乘参数识别算法来估计车辆每个单独车轮处的独立路面附着系数.Liu 等[24]提出一种APF-IEKF 的综合方法来估算轮胎路面附着系数.路永婕等[25]采用无迹卡尔曼滤波器对重型三轴车的轮胎路面附着系数进行了估计.Zhang 等[26]对8 × 8 的电动轮车辆的路面附着系数进行了估算,并基于此进行了各车轮力矩的合理分配,实现了稳定性控制.Chen 等[27]提出了一种基于相似性原理的方法对路面最大附着系数进行估算,该方法综合考虑横纵向动力学特性和非线性特性,实现了全工况下的路面附着系数精确估计.
另一个挑战是每个车轮制动缸的精确液压调节问题.必须通过相应的液压执行器来执行避撞控制策略所需的减速度.温度、湿度和负载的变化会直接严重影响车辆的综合制动性能.因此,Yang 等[28]提出一种集成式电液制动系统的一般原理方案,以实现各个车轮制动缸在各种制动条件下独立而精确的液压调节控制.Hutter 等[29]研究了自动行走式挖掘机底盘的液压实现,并提出新一代高性能液压阀,具有集成压力反馈功能,可以实现快速准确的油缸压力跟踪控制.Nie 等[30]提出一种新的分层制动控制方法,通过产生一定的制动力达到制动减速度的需求,该控制方法对避撞功能产生了较好的控制效果.
考虑到各种交通条件、不确定的路面摩擦系数以及复杂的液压制动执行器,本文提出了一种基于可拓决策方法的自适应避撞控制方法(adaptive collision avoidance control,ACAC).首先,利用滑模观测器(sliding mode observer,SMO)估计轮胎纵向力,利用带遗忘因子的递推最小二乘法(recursive least square method with forgetting factors,FFRL)估计路面摩擦系数.然后,基于FFRL 的估计值,由ACAC 决定采用哪种避撞控制策略,并采用可拓决策方法.最后,主动减速度控制(active deceleration control,ADC)可以通过精确的液压制动控制采用点刹预警制动或全制动实现避碰控制策略.
1 车辆动力学模型
如图1 所示,采用包含4 轮纵向运动和4 轮旋转运动的车辆纵向动力学模型.车身沿车辆纵轴方向的运动方程和4 个车轮的旋转运动方程如下
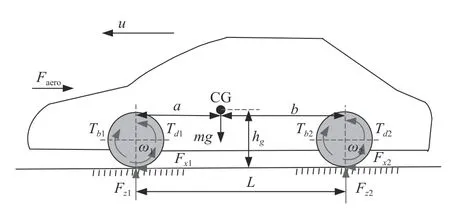
图1 纵向车辆动力学模型Fig.1 The longitudinal vehicle dynamics model
其中,m为车辆质量,u为纵向和横向速度.Fx1和Fx2分别为前、后轴轮胎纵向力.Faero为空气阻力.Iw为车轮绕旋转轴的惯性矩.ωij为车轮角速度.其下标ij包括fl,fr,rl和rr,分别代表左前轮、右前轮、左后轮和右后轮.下文所有公式中的ij具有相同含义.Ttij和Tbij分别表示每个车轮的驱动扭矩和制动扭矩.R为每个车轮的半径.
各轮胎的纵向力和纵向滑移率之间的关系如图2 所示.纵向滑移率定义如下
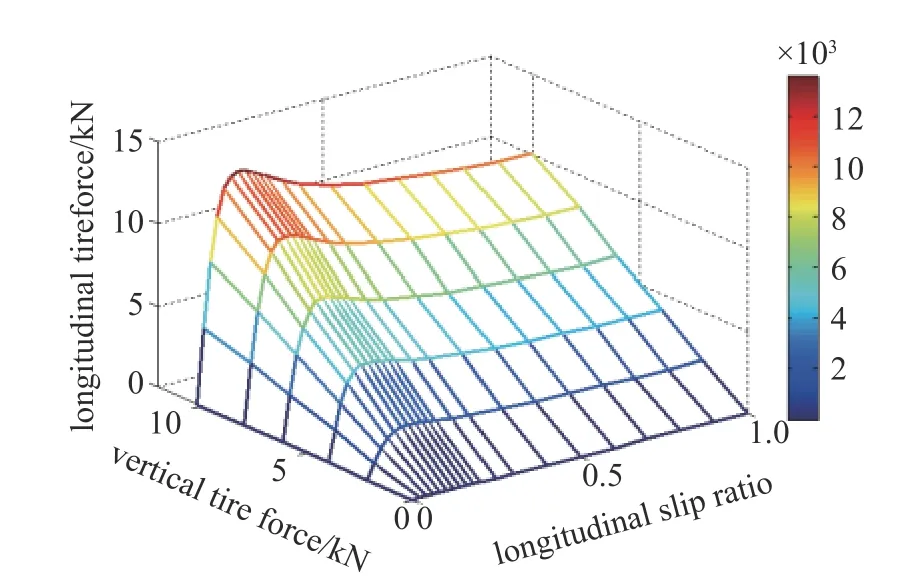
图2 各轮胎纵向力与纵向滑移率的关系Fig.2 The relationship between the longitudinal tire force and longitudinal slip ratio of each tire
考虑车身载荷传递的影响,可推导出前、后轴的轮胎垂向力.Fz1和Fz2如下所示
式中,hg为车辆质心高度.a和b分别为前、后轴到车辆重心(CG)的距离.
2 ACAC 设计
如图3 所示,所设计的ACAC 主要由3 部分组成: 路面附着系数估计算法、基于可拓决策的避撞控制和精确液压制动控制.其中设计了一种用于估计轮胎纵向力的SMO 法,并利用FFRLS 估计路面摩擦系数.基于可拓决策法可以确定在点刹预警制动或全制动情况下的避撞控制策略.然后,基于上述避撞策略的预期减速度,液压制动控制模块计算出预期的主缸制动压力.为了提升制动压力控制精度,该模块首选基于减速度值进行前馈计算出基准压力,然后基于误差计算出补偿压力,两者结合保证了制动压力精确控制.最后,液压控制单元(hydraulic control unit,HCU)实现所需的泵速和阀门占空比.
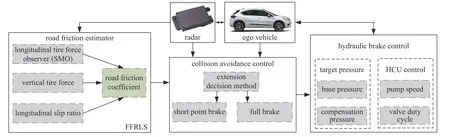
图3 ACAC 的框架图Fig.3 The framework of the proposed ACAC
2.1 轮胎纵向力的SMO 法
所设计的SMO 仅使用车载传感器测量的信号,即车轮角速度来估计轮胎所受的纵向力.
为设计出SMO,将式(2)转换成
式(7)的推导如下
然后,即可设计出系统状态观测器
其中,Lij表示观测器的增益.
结合式(8)和式(9),可重新计算上面的Lyapunov函数的推导,结果如下
由于轮胎纵向力Fxij未知且输入变量有界,故总存在正数 ε,当其足够大时,可满足下式
然后,结合式(10)和式(11),Lyapunov 函数的推导可以表示为如下
然后,式(12)可转化成如下形式
如式(15) 所示,Lyapunov 函数的推导过程满足系统稳定.因此,轮胎纵向力可以收敛到滑模面.
系统变量误差的推导可计算如下
其中,ε为观测器的滑模增益,Lij为观测器的反馈增益.
由于时间延迟和系统惯性的作用,SMO 可能发生抖动,并且较大的抖动将会导致较大的估计误差.因此,所设计的SMO 中采用了边界层的概念,并用饱和函数sat(s) 代替了饱和函数 s gn(s),从而能够大幅削弱抖动
式中,φ >0且表示边界层的厚度.
那么,轮胎纵向力的SMO 可表示为
2.2 道路摩擦系数估算
当轮胎工作在线性轮胎区域[31]时,前、后轴的归一化轮胎纵向力Fxi,N与滑移率si成正比.Fxi,N可由式(20)计算得到.由于轮胎何时开始在其非线性区域内工作没有明确的定义,因此本文只考虑车辆在线性轮胎区域内工作的情况.
因此,当轮胎工作在线性区域时,轮胎纵向力之和Fx可表示为
其中,k1和k2分别为前轮轮胎刚度和后轮轮胎刚度.α 表示k1和k2之间的关系系数,即 α=k1/k2.
式(21)可以用如下参数辨识形式表示
其中,θk为向量估计参数,在本文中该参数为k2.φk代表回归向量,在本文中即为 αFz1s1+Fz2s2.ek为估计值与真实值yk之间的识别误差,即Fx.
所提出的FFRLS 算法可以对未知参数进行更新,从而使得模型误差的平方和最小.
首先,yk可由式(19) 中提出的轮胎纵向力的SMO 计算得到.其次,根据式(3)~ 式(5)可计算出回归向量 φk.
然后,参数辨识误差,即ek可通过下式计算
再然后,由式(24)和式(25)可计算得到协方差矩阵Pk以及更新的增益向量Kk
其中,遗忘因子 λ可在0.9~ 1 之间选择,在本文中,该值取为0.95.
最后,利用式(22)通过提出的FFRLS 算法估计参数.滑动斜率定义为轮胎纵向力与滑移率曲线的初始斜率,即可在本文中观测到的滑移率坡度k2.
在低滑移区域,对于任何给定的路面和法向力,车辆纵向力与相应的滑移率成正比.因此,轮胎-路面的摩擦系数可估计为
其中,η1和η2分别为比例值和偏置常数,且可通过仿真进行校准.
2.3 避撞控制策略
所提出的ACAC 系统可根据可拓决策法确定采用哪种避撞控制策略.基于自车与前车的运动关系,可建立二维扩展集.将即将发生碰撞的时间Tic定义为主要特征量,将碰撞危险距离Dcd定义为辅助特征量,则能建立二维扩展集,并可将其分为3 个不同的域: 经典域 C、扩展域E和非域 N,如图4 所示.
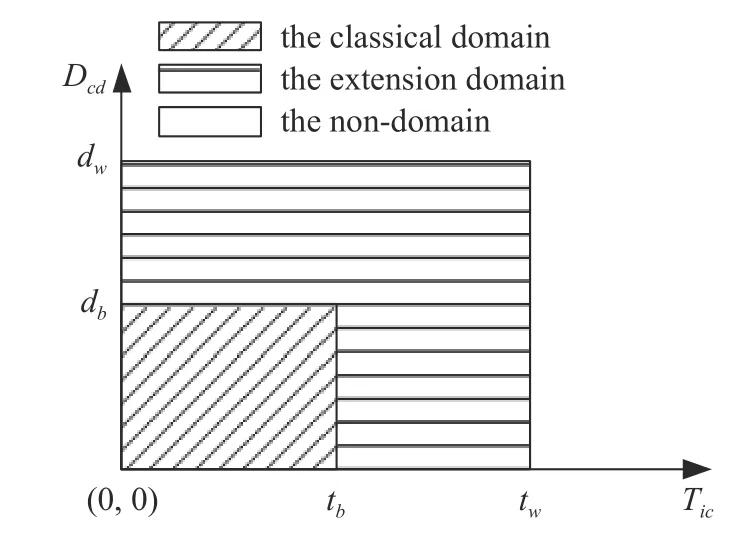
图4 二维可拓集的3 个域Fig.4 Three domains of the two-dimensional extension set
根据自车与前车的相对距离对碰撞危险指数Dcd进行设计,即d.再设计另一种基于时间的碰撞危险指数Tic,其利用如式(27)所示的自车和前车的动力学状态
其中,ve和ae分别为自车的纵向速度和纵向加速度.vr和ar分别为自车与前车之间的相对速度和相对加速度.d为自车与前车间的相对距离.
考虑到自车与前车间相对运动的不同,Tic可计算如下
众所周知,路面轮胎摩擦系数对制动距离影响很大.考虑到附着系数,自适应临界制动距离db、临界预警距离dw以及临界时间tb和tw可表达如下
然后,根据度量模式的识别确定相应的避撞策略.(1)若特征量在经典域 C 内,即 {K(S)≥0},则采用全制动避撞策略;(2) 当特征量在扩展域E中,即{−1 ≤K(S)<0},则采用点刹预警制动避撞策略以警示驾驶员;(3)如果 {K(S)<−1} 且特征量在非域 N内,自车不存在碰撞危险,因此避撞策略不需要采取任何措施.
2.4 基于ADC 的液压制动控制
该避撞策略基于可拓决策法给出了自车的预期减速度.然后,ADC 能够通过精确的液压制动控制,实现避撞控制策略的预期减速度,即点刹预警制动或全制动.如图5 所示,测试车辆装有轮缸压力传感器、电子控制单元(electronic control unit,ECU)和HCU.本文提出的ADC 方案如图6 所示,它包括两个子模块,即基于比例−积分−微分(proportion integration differentiation,PID)的压力计算子模块和压力控制子模块.压力计算子模块可根据PID 自适应地给出所需的轮缸液压压力,以实现所需的减速度.压力控制子模块可以控制HCU 的电磁阀和液压泵,并能使适量的制动液流入轮缸,从而使自车减速.
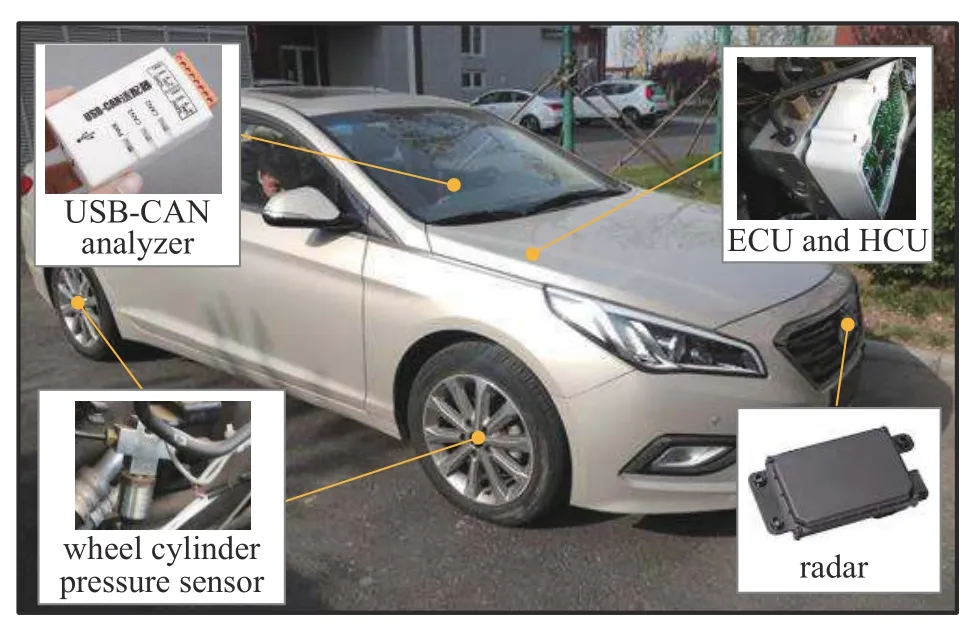
图5 装有各种传感器和设备的试验车Fig.5 The experiment car with various sensors and equipment
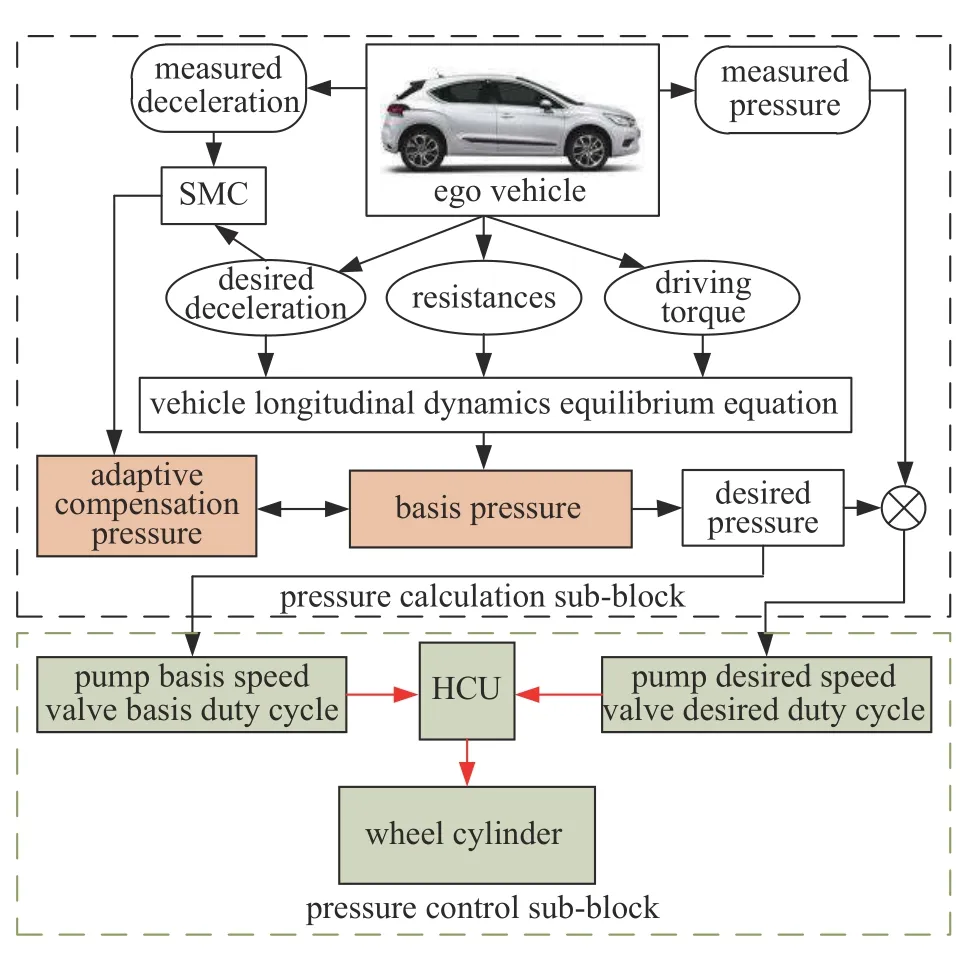
图6 ADC 方案Fig.6 The scheme of the proposed ADC
基于PID 的压力计算子模块采用如下所示的车辆纵向动力学平衡方程来计算基础轮缸液压压力Pbasis,即
其中,Te为发动机驱动扭矩,ig和i0分别为变速箱传动比和驱动传动比.ηT为动力传动系统效率.CD为空气阻力系数,A为迎风面积.i为道路坡度,δ为车辆等效惯性系数.KP为制动扭矩系数.
由于车辆动力学模型的非线性和不确定性,补偿压力可通过PID 控制器来计算.然后,预期压力即为基础液压压力与补偿压力的总和.
为了克服车辆动力学模型的非线性和不确定性,一种基于PID 的补偿控制器被设计用来给出补偿压力.因此,预期的减速度可被准确、及时地跟踪.将测量到的减速度与预期减速度之间的误差ed设计为基于PID 的补偿控制器的输入,且其输出PPID为补偿压力,即
最终,预期的轮缸压力为基础液压压力和补偿压力的总和,即
预期的液压压力可以通过压力控制子模块,即ADC 的执行器来实现.它由ECU 和HCU 组成.此外,所设计的ACAC 的程序在ECU 上进行编写.通过控制电磁阀的占空比和ECU 的泵速来实现所需的轮缸压力.首先,通过大量车载实验标定电磁阀占空比的基准值和压力的基准值.在轮缸增压过程中,作用在阀门上的驱动电流为零且只有泵工作,本文通过将泵的负荷从0%逐步提高到100%来校准增压率.而在轮缸减压过程中,泵转速为零且只有HCU 的阀门工作,本文通过将阀门的负荷从0%逐步提高到100%来校准减压率.此外,标定试验采用轮缸初始压力逐级增大的方式且标定结果如图7 所示.然后,利用插值法计算电磁阀占空比的基准值和压力的基准值.
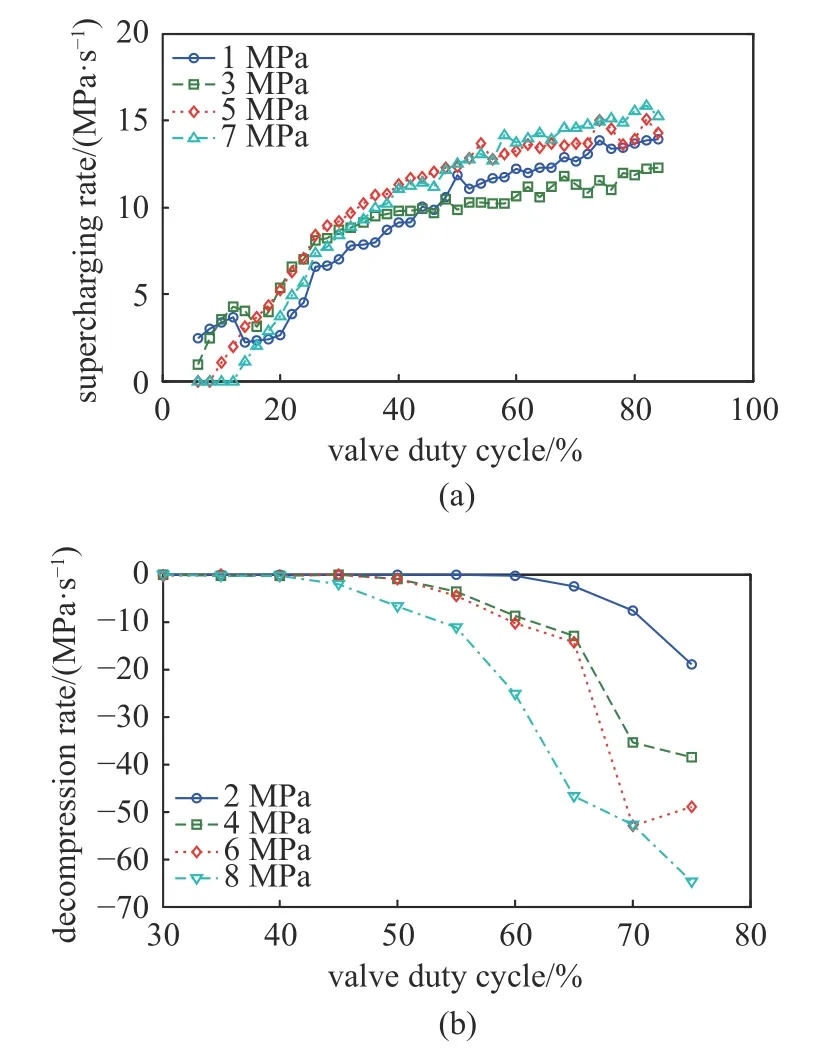
图7 增压和减压速率的校准结果Fig.7 The calibration result of the supercharging and decompression rate
由于液压系统的复杂性和非线性,实际压力与预期压力相比可能存在偏差.因此,本文采用一种基于实际实时压力的反馈控制器,即
其中,Ts为控制周期.Ksup和Kdec分别为增压速率和减压速率.
基于简化的式(39)中的水力模型,压力控制子模块能够计算增压速率或减压速率,且通过设计好的查表可得到电磁阀占空比和压力的基准值,即DCv,basis和DCp,basis.反馈控制器根据压力偏差 ∆P给出阀和泵的补偿占空比,即
其中,DCv,com和DCp,com为阀门和泵的补偿占空比.Kv和Kp为反馈增益.
3 仿真结果
为了研究第3 节中提出的ACAC 的性能,利用MATLAB/Simulink 和CarSim 车辆仿真软件对ACAC 进行了数值模拟,车辆模型使用如图8 所示的CarSim 中的“轿车”模型,在MATLAB/Simulink中进行ACAC 的设计.系统关键参数如表1 所示.如图8 所示为一种紧急避撞模拟,即在单向道路上,前车突然停在自车前面.此外,设置路面摩擦系数为变量且范围为0.4~ 0.9.纵向速度和自车与前车的距离如图9 所示.己方车辆首先从大约8 m/s 加速到28 m/s 左右,然后再慢慢减速直到ACAC 工作.当所提出的ACAC 工作时,自车急剧减速.前车在开始时距离自车约500 米.由于ACAC 的作用,自车与前车没有发生碰撞且当自车停止时,两者间的距离约为1.9 m.
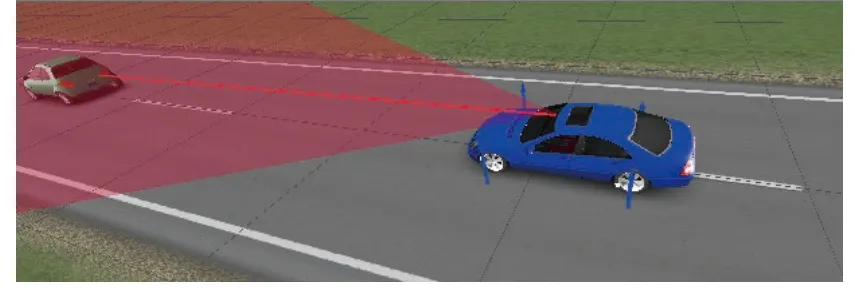
图8 CarSim 中的一种紧急避撞场景Fig.8 A collision avoidance emergency scenario in CarSim
表1 系统主要参数表Table 1 Main parameters of system
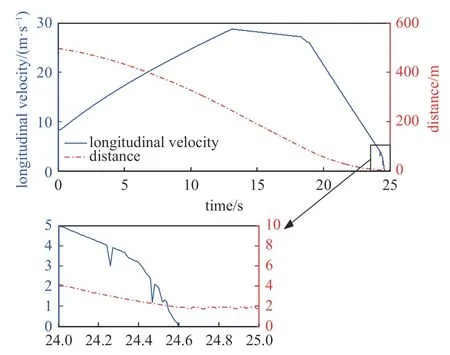
图9 前方车辆与自身车辆间的纵向速度和距离Fig.9 The longitudinal velocity and distance between the preceding and ego vehicle
图10 显示了轮胎纵向力估计值之和并用于路面摩擦系数的估计.纵向力的观测值与实际值之间的误差很小,能够满足路面摩擦系数估计精度的要求.图11 为路面摩擦系数的估计结果,路面摩擦系数估计值与实际值非常接近.路面摩擦系数在5 s 左右前为0.9,之后降低至0.4.预估的路面摩擦系数在0.5 s 前变动有点剧烈,并迅速收敛到0.9.在5 s 左右,路面摩擦系数降低到0.4 且估计值准确收敛到0.4.
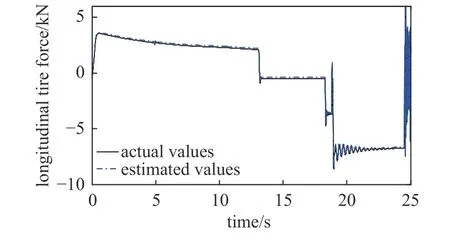
图10 实际和估计的轮胎纵向力Fig.10 The actual and estimated longitudinal tire force
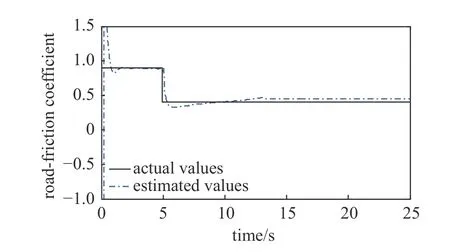
图11 实际和估计的路面摩擦系数Fig.11 The actual and estimated road friction coefficient
基于预估的路面摩擦系数,利用可拓决策法,所提出的ACAC 采用合理的控制策略防止碰撞.如图12 所示,在18 s 左右采用点刹预警制动避撞策略,在19 s 左右采用全制动策略.众所周知,路面摩擦系数越小,制动距离越长,最大减速度越小.图13 关于纵向加速度,在约14 s 之前,自车以约1.8 m/s2的平均加速度加速.点刹预警制动控制策略在18 s 左右给出了预期的减速度,约为 − 2.2 m/s2且保持0.5 s 左右.点刹预警制动策略提醒司机避开障碍物.约18.9 s 时,采用全制动策略,减速度约4.4 m/s2,减速度与路面附着系数相适应.当自车停止时,预期减速度为零,ACAC 采用保持静止的策略.图14 显示了4 个车轮的轮缸液压压力.精确的液压压力调节确保了实际减速度非常接近图13 所示的预期减速度.
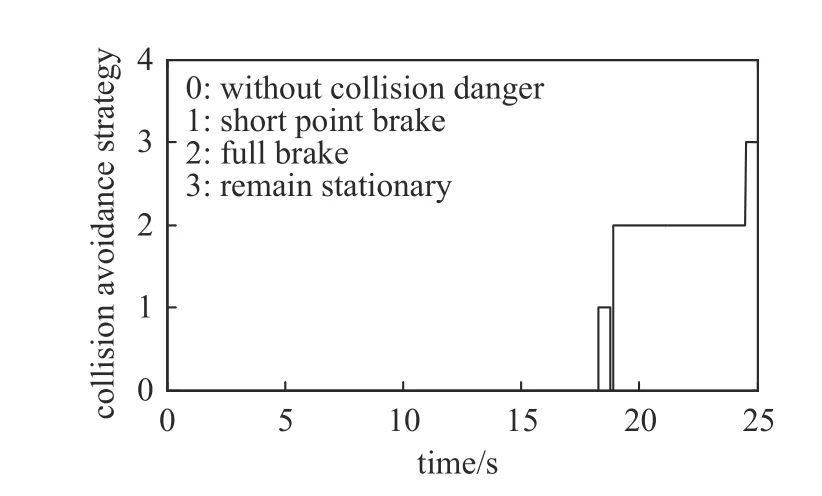
图12 避撞策略Fig.12 The collision avoidance strategy

图13 预期和实际的纵向加速度Fig.13 The desired and actual longitudinal acceleration
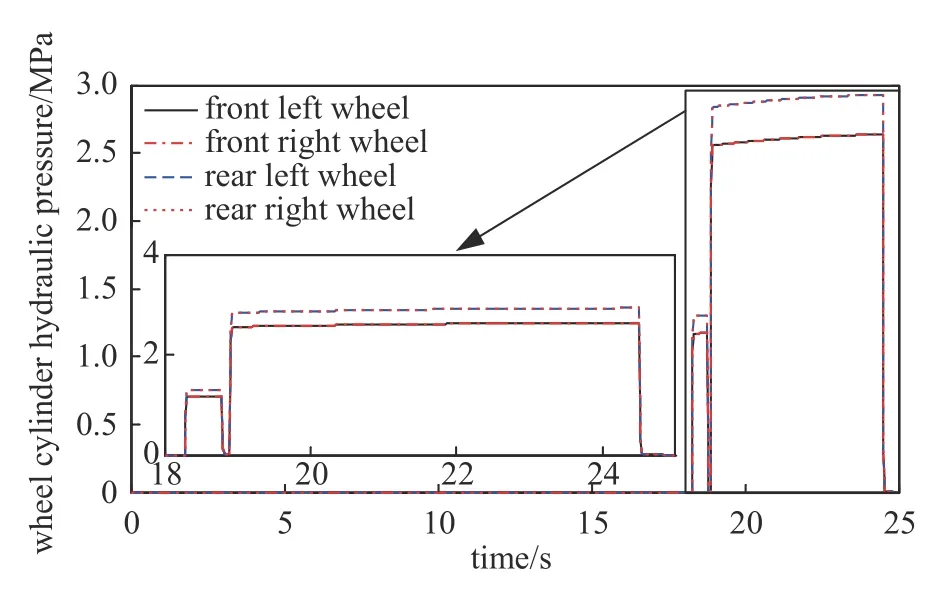
图14 四轮的轮缸液压压力Fig.14 The wheel cylinder hydraulic pressure of four wheels
4 结论
本文提出了一种基于可拓决策法的自适应避撞系统.该系统不仅能对路面摩擦系数进行自适应控制,还能通过ADC 对制动液压压力进行精确控制.首先,采用FFRLS 估计路面摩擦系数,且FFRLS 利用了由SMO 估计的轮胎纵向力.然后,基于FFRLS的估计值,ACAC 确定采用哪种避撞控制策略,并同时采用了可拓决策法.最后,ADC 通过精确的液压制动控制实现点刹预警制动或全制动的避撞控制策略且通过仿真验证了ACAC 的有效性.实际道路环境极端复杂,如路滑和道路倾斜等,并且受实车测试场景设计限制,本文尚未对算法策略进行实车试验测试.同时考虑实车测试易发生危险事故,因此未来研究将进一步提升系统鲁棒性,部署在实车上对算法进行进一步验证和迭代优化.
猜你喜欢
同济大学学报(自然科学版)(2022年11期)2022-12-01 07:31:56
同济大学学报(自然科学版)(2022年11期)2022-12-01 07:31:56
中外公路(2022年1期)2022-05-14 08:13:26
装备制造技术(2021年4期)2021-08-05 07:39:22
能源工程(2020年6期)2021-01-26 00:55:22
汽车工程(2019年10期)2019-11-02 02:51:50
山东冶金(2019年3期)2019-07-10 00:54:04
汽车维护与修理(2019年15期)2019-02-27 04:51:46
消费导刊(2018年10期)2018-08-20 02:57:02
通信电源技术(2016年1期)2016-04-16 04:57:26