
考虑阀口压差和阀芯运动方向的比例方向阀死区补偿
2023-02-24 07:14:08张宝成黄家海吉星宇赵瑞峰
液压与气动 2023年2期
杨 凯, 张宝成, 黄家海, 吉星宇, 赵瑞峰
(1.太原理工大学 机械与运载工程学院, 山西 太原 030024; 2.太重集团榆次液压工业有限公司, 山西 晋中 030600; 3.山西工程职业学院 机械电子工程系, 山西 太原 030009)
引言
比例阀具有调速功能[1],在液压系统中占据着重要地位。然而比例阀与伺服阀相比,存在零位死区[2],影响比例阀的控制性能[3-4]。比例阀在进行速度和位置控制时,死区会导致控制不连续。在稳定性较强场合需要连续稳定控制,因此减小或抑制比例方向阀死区很有意义。
为了获得良好的死区补偿效果,吴强等[5]在定值补偿基础上,设计了变幅值的死区补偿方法。刘白雁[6]提出了超前切换+变幅值的补偿方法,即开始过死区时切换的补偿电压的幅值较大,然后迅速减小,当通过死区后再回到正常值。MOHANTY A等[7]提出了直接/间接自适应鲁棒综合控制器,将流量阀死区非线性在大部分工作范围内线性参数化,采用一种渐进估计算法结合一定的状态监测,获得了未知死区的参数进行准确估计,对死区进行补偿,提高了系统的跟踪性能;HU C等[8]使用了鲁棒自适应控制方法进行死区补偿。文献[9-10]中采用了自适应逆函数的方法来解决迟滞、死区和齿隙这类不光滑非线性特性的问题。HUANG Jiahai等[11]提出了双线性插值的流量补偿控制器。此外,考虑阀口压差的模糊控制[12-14]、神经网络控制[15-16]、滑模控制[17]以及双线性插值控制[18-19]等越来越多的智能控制算法和技术被应用于死区补偿,以提高对死区控制效果。这些研究和方法对死区的补偿都有重要意义,从阀口压差和死区变化进行补偿,在一定程度上都减小了比例方向阀的死区。在之前研究中发现,阀芯在不同行程时,阀芯复位弹簧会影响死区大小,但没有对其进行考虑。
针对上述问题,提出一种考虑阀口压差和阀芯运行方向的死区补偿方法,提高死区补偿效果。该补偿方法首先需要根据阀芯信号确定正返行程,之后进一步考虑阀口压差的影响。阀口压差恒定时,可近似认为比例方向阀输出流量与阀芯位移成正比,此时可对比例方向阀静态流量曲线进行转化,构建出流量参考曲线;阀口压差变化时,根据实际压差,查表获得临近压差,利用补偿方法获得期望电压,期望电压进而转化为实际驱动电压,进行比例方向阀的驱动。该方法不但进行了死区补偿,而且能提高补偿后的流量线性度,减小流量滞环。
1 死区补偿方法
1.1 定压差工况下的补偿方法
带有死区的比例方向阀输出流量:
q=f(ui1,Δp)
(1)
不考虑液动力和动态特性影响,阀芯位移可表示为:
x=kui1
(2)
式中,Cd—— 流量系数
w—— 面积梯度,mm
x—— 阀芯位移,mm
pi—— 流量阀入口流体压力,MPa
po—— 流量阀出口流体压力,MPa
Δp—— 进出口流体压差,其中Δp=pi-po,MPa
umin—— 特定压差下的死区阈值,V
umax—— 最大输入电压,V
ui1—— 驱动电压,V
k—— 比例电磁铁增益,mm/V
定义变量,假设Cd为常数,当Δp恒定时,K为定值:
(3)
(4)
由式(4)可知,简化后的阀口输出流量可以看作图1中的曲线1,在ui1≤umin时,输出流量为0,为流量死区;曲线1的表达式为:
(5)
定压差死区补偿策略为: 将图1中含有死区的曲线1转化为无死区的曲线3,曲线3的表达式为:
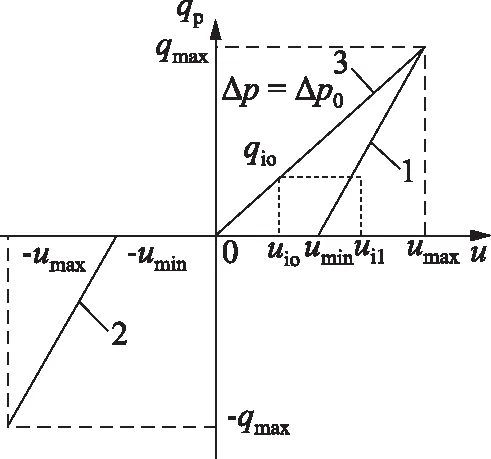
图1 静态流量曲线图
(6)
式中,uio—— 输入电压
假设阀进出口压差恒定,流量和输入电压信号成正比,结合式(5)、式(6)可得:
(7)
正行程时:
(8)
返行程时:
(9)
对于不同行程,相同压差下,阀芯行程方向会影响驱动电压,因此需要考虑阀芯行程方向。
1.2 变压差工况下的补偿方法
在实际应用时,比例方向阀阀口压差不恒定,需考虑在压差变化情况下电压的调整。图2所示为流量参考曲线族,是在不同压差和确定行程方向时,做出的补偿后期望流量曲线,同图1中的曲线3。
图2所示的流量曲线族中,假设当前阀口进出口压差Δp=Δpa,Δpa∈(Δpj,Δpj+1), 期望输出流量(与输入电压信号相关)qp=qio,需确定Mint对应的输入电压值uio。假设阀口的最大压差为Δpmax,将最大压差等分为n等分,j等分处的压差为Δpj=(Δpmax/n)*j,压差最小为1 MPa。实际测得阀口压差数据,通过查表法,确定当前压差的临近压差Δpj和Δpj+1。L1和L2为压差等于Δpj和Δpj+1对应的流量曲线;M1和M2表示期望输出流量qp=qio与L1,L2直线相交的2个点;M1和M2的电压值为u1,u2。
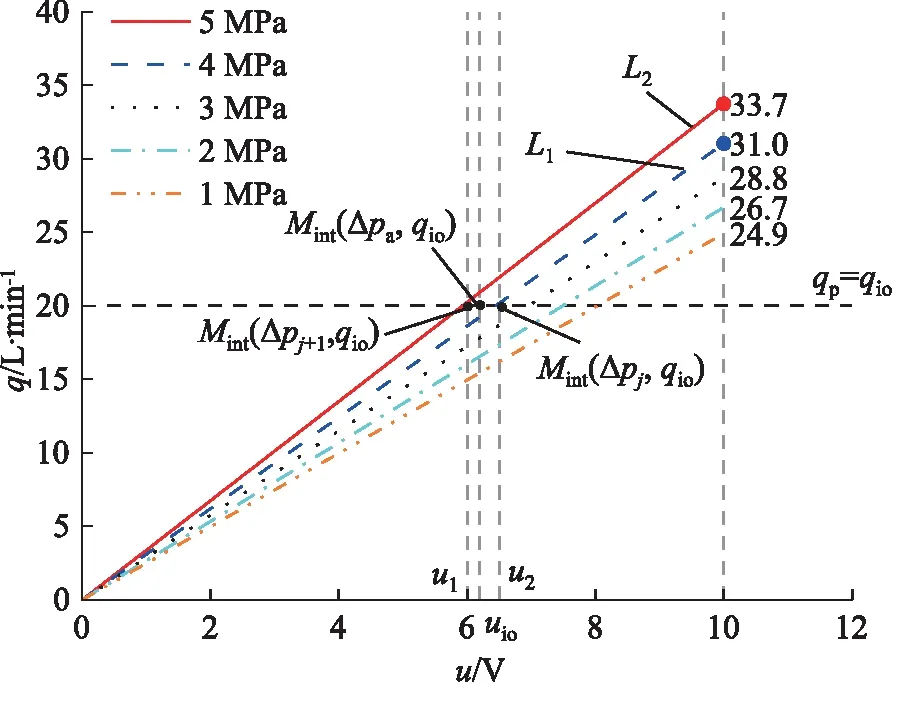
图2 流量参考曲线族
(10)
(11)
当Δp=Δpa,qp=qio时,控制器的输入电压uio可以表示为:
(12)
将uio带入式(7)可得到实际驱动电压ui1驱动电磁阀。
(24)拟带叶苔 Hattorianthus erimnous(Steph.)R.M.Schust&Inoue 赵文浪等(2002)
2 补偿控制器的设计
死区补偿方法控制器框图如图3所示,控制器主要由补偿算法和电流闭环控制构成。输入电压信号、进口压力、出口压力等通过ADC转换进入控制器,作为控制器的输入,控制器的驱动电流作为输出。补偿过程主要包括两个条件判断、插值程序和电流PI控制;第一个判断为压差判断,若小于1 MPa,不进行压差补偿;第二个判断为正返行程判断,根据正返行程选择相应的流量参考曲线族进行插值补偿;经过两次判断后调用插值程序,插值得到插值电压,进一步转化为驱动电压进行比例阀的驱动。
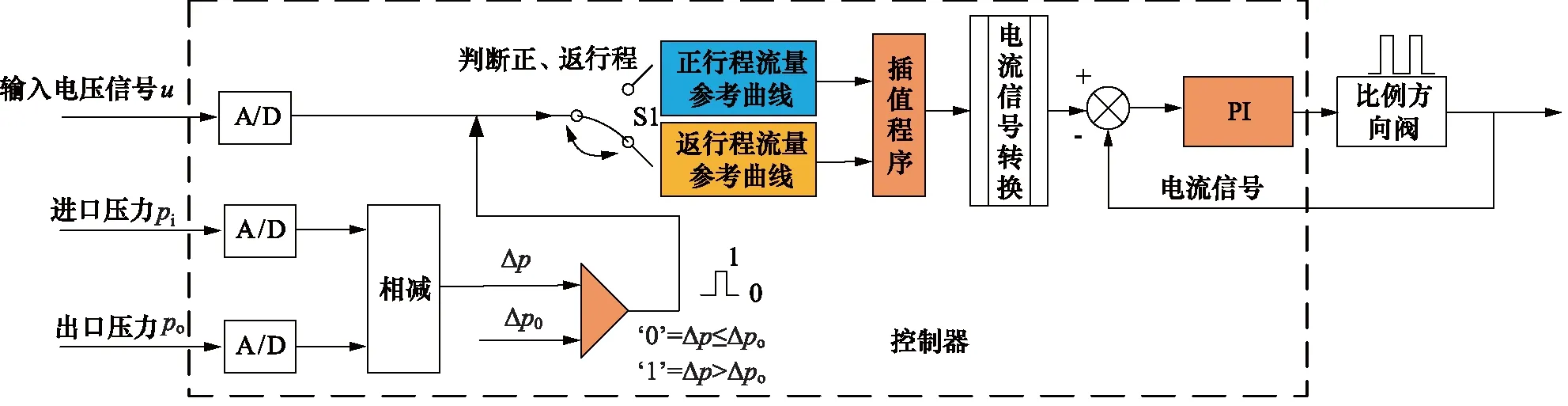
图3 死区补偿方法控制器框图
2.1 电流闭环控制器设计
电磁铁中衔铁在磁场中受到的电磁力为比例电磁铁输出力:
fe(t)=(i(t)N)2/(2Rgl)
(13)
式中,fe(t) —— 衔铁受到的电磁力
N—— 线圈匝数
Rg—— 气隙磁阻
l—— 气隙长度
i(t) —— 通过线圈的电流
采用手动调节方法对PI电流闭环反馈进行参数设置,调节器的控制关系式如式(14):
(14)
在实验时,比例系数Kp=1,积分系数Ki=0.06时,控制效果比较好。
对比例方向阀进行实际的电流控制实验。在开环和PI控制方式下进行阶跃响应实验,得到图4所示阶跃响应图。为方便阶跃响应测试,下图所示的实验数据在单独给定比例方向阀1.5 A信号下获得,1.5 A的电流可以保证阀芯完全打开。
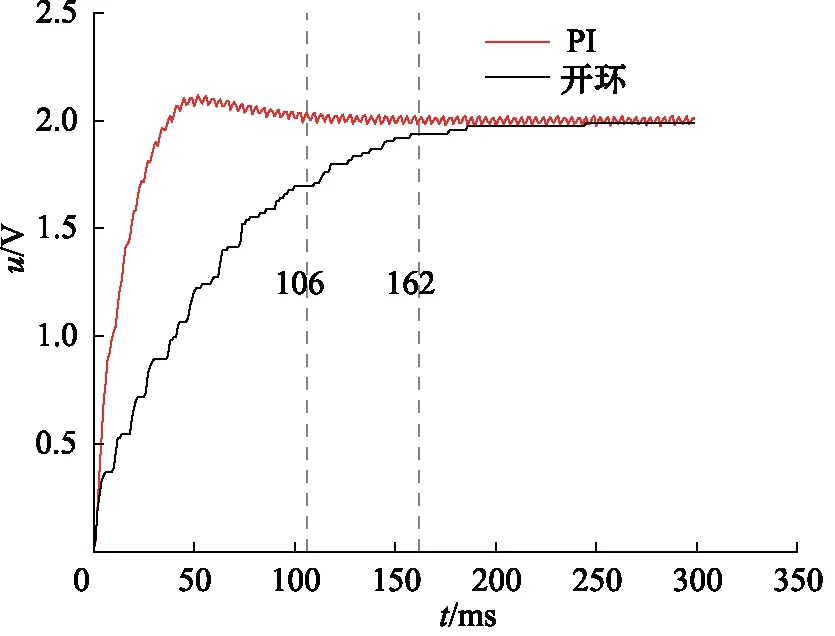
图4 开环控制和PI控制阶跃响应对比
对实验结果进行分析,PI控制的电流信号,响应时间比开环时提高了34.57%,稳定性相比开环控制也有提高。因此本研究设计的控制器可以对电磁铁进行稳定的驱动,为补偿方法的实现提供了基础。
2.2 流量参考曲线族建立
图3中的正返行程参考曲线需建立后,才能用于控制器中。依据上文提出的理论对流量参考曲线族进行实验构建。假设阀口压差恒定,改变驱动电压,得(uj1,q1),(uj2,q2),…,(ujmax,qmax)。获取有限流量阀驱动电压与流量关系,如表1所示, 结合式(7)得到如图2所示的流量参考曲线族。

表1 驱动电压与流量、阀口压差的关系
3 实验结果与分析
采用所研制的比例控制器进行补偿试验,实验平台主要由液压泵、溢流阀和流量阀等液压元件组成。实验平台采用ATOS的E-ATR-5/250/I型压力传感器(量程范围为0~25 MPa)对主阀入口处压力pi进行测量;采用ATOS的E-ATR-6/100/I型压力传感器(量程范围为0~10 MPa)对主阀出口处压力po进行测量;使用齿轮流量传感器SCVF-150-10-07(最大量程为150 L/min)测量比例方向阀的阀口输出流量;NI-USB-6343采集卡采集传感器信号;泰克AFG1022信号发生器输出0~10 V的控制信号。实验时,将比例方向阀的进出口相连,比例方向阀处于空载状态,溢流阀用来设定进口压力,则溢流阀设定压力即为比例方向阀进出口压差。
3.1 未补偿静态流量特性曲线
利用已设计的死区补偿控制器进行静态性能实验。对比例方向阀输入信号频率0.05 Hz、幅值10 V的连续三角波信号,并添加颤振频率45 Hz、幅值2 V的颤振信号。设定进出口压差为2 MPa和3 MPa时,分别进行实验,验证考虑阀口压差和阀芯运动方向补偿方法的效果。
图5和图6为2 MPa和3 MPa压差时,没有补偿的静态流量特性曲线。可知,同压差下正返行程的死区不相同,静态流量曲线线性关系也不相同。2 MPa压差时,正行程死区范围为0~4.76 V;返行程死区范围为0~3.58 V。3 MPa压差时,正行程死区范围为0~4.72 V;返行程死区范围为0~3.51 V。相同压差时,返行程的死区要小于正行程的死区。

图5 2 MPa压差无补偿静态流量特性曲线

图6 3 MPa压差无补偿静态流量特性曲线
以2 MPa压差试验结果为例,正行程流量的线性度为6.00%;返行程流量的线性度为4.83%。比例方向阀的静态流量曲线滞环为8.3%。在实际应用时会影响系统的正常运行。
3.2 不同补偿方法静态流量特性曲线
采用文献[5]中所述的死区补偿方法进行补偿实验,设置阀口压差为 2 MPa,其补偿算法如式(15),实验数据如图7所示。补偿前正行程的死区范围为37.8%,返行程的死区范围为46.9%;补偿后正、返行程死区范围为3%。补偿前正、返行程线性度分别为6.00%和4.83%;补偿后正、返行程线性度分别为6.21%和14.09%。文献[5]中的死区补偿方法减小了死区,但线性度没有减小。
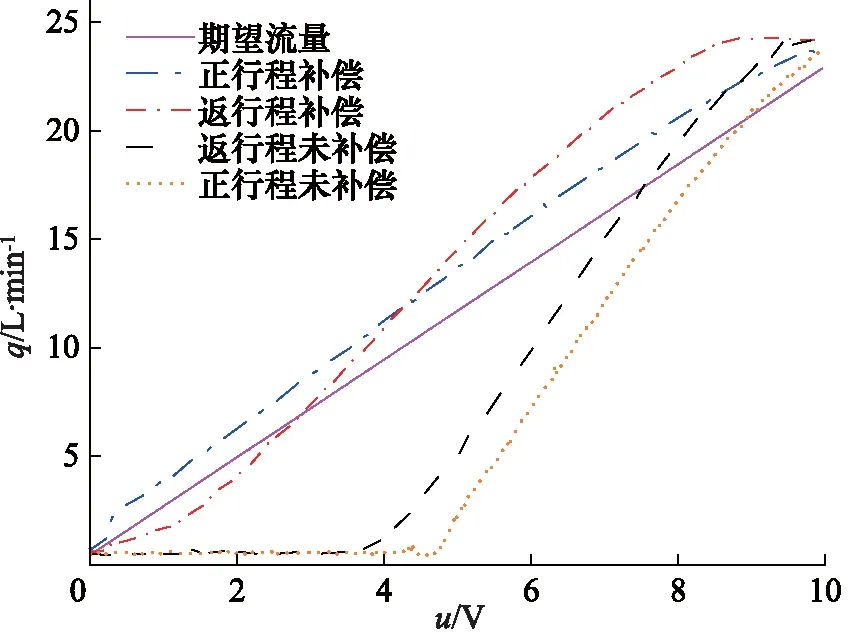
图7 变幅值死区补偿方法
(15)
图8~图10为进出口压差为2~4 MPa时,使用考虑压差和正返行程补偿方法获得的静态流量特性曲线。对2 MPa压差试验数据进行分析,流量死区基本消除。补偿后正行程流量的线性度为5.00%;返行程流量的线性度为3.56%。比例方向阀的静态流量曲线滞环为1.21%。补偿前,比例方向阀的静态流量曲线滞环比较大;补偿后,比例方向阀的静态流量曲线滞环明显减小。原因在于,补偿后驱动电压得到了校正,比例方向阀的输出流量能够达到期望流量。正返行程的期望流量曲线是一致的,即同一输入信号的期望流量是一致的。因此,补偿后,正返行程在同一输入信号下,阀的输出流量是一致的,也就达到了减小流量滞环的目的。

图8 2 MPa压差补偿静态流量特性曲线

图9 3 MPa压差补偿静态流量特性曲

图10 4 MPa压差补偿静态流量特性曲线
通过以上数据分析对比,考虑压差和阀芯运动方向的补偿方法不仅可以补偿死区,对流量也有明显的补偿效果。2 MPa压差时,比例方向阀正行程补偿后流量误差为5.35%;返行程补偿后流量误差为1.72%。3 MPa压差时,比例方向阀正行程补偿后流量误差为12.08%;返行程补偿后流量误差为4.09%。4 MPa压差时,比例方向阀正行程补偿后流量误差为19.29%;返行程补偿后流量误差为5.80%。补偿后的流量误差整体在一个比较小的范围,尤其是在返行程时流量误差会更小,2~4 MPa条件下,流量误差在返行程时都小于6%。
3.3 补偿方法AMESim仿真验证
在AMESim中搭建如图11和图12所示的仿真系统,进行补偿方法验证。在仿真系统中没有进行阀芯方向的仿真,只进行了考虑阀口压差的仿真。对于阀芯方向的考虑,只需要按照上文所述将流量参考曲线构建出即可。在液压仿真系统中添加了液压执行机构,对比例方向阀A口输出流量进行观察,验证补偿效果。
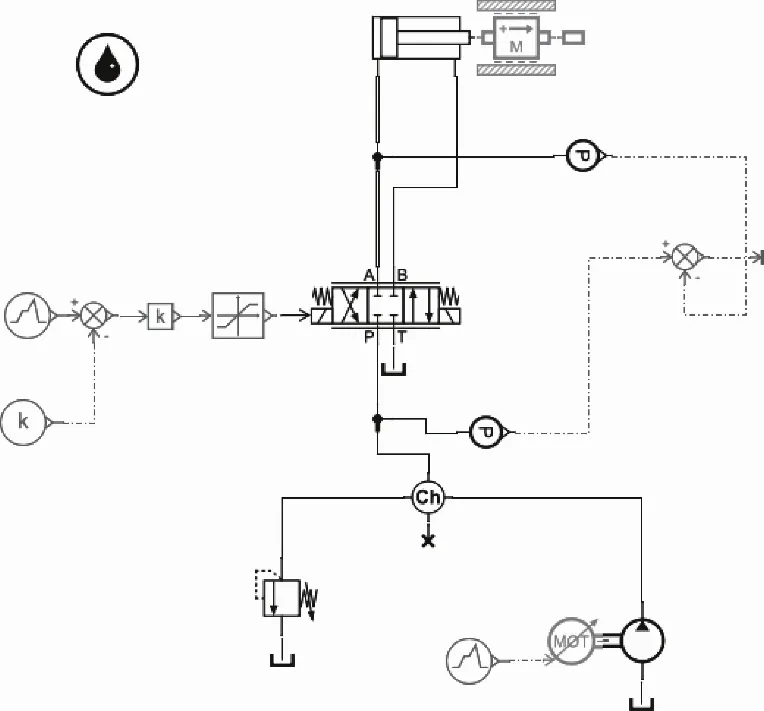
图11 未补偿时AMESim液压系统模型

图12 补偿时AMESim液压系统模型
图13为比例方向阀进出口压差,图14为有补偿和未补偿时通过比例方向阀A口的流量。图13中压差从10 MPa降到2.5 MPa附近。由图14可知,对于同样的压差变化,未补偿的系统存在大概19%的死区,有补偿时系统死区接近0%。

图13 比例方向阀阀口压差

图14 补偿和未补偿方法对应的输出流量
4 结论
补偿控制器的电流闭环控制有更好的驱动能力,相对开环控制,电流PI闭环控制响应时间提高了34.57%,控制稳定性也比开环有所提高。考虑阀芯行程方向可以减小阀芯复位弹簧对比例方向阀输出流量的影响;考虑阀口压差变化的补偿方法可以进行流量调整,在补偿死区的同时对流量进行补偿。补偿后,流量滞环和流量误差也都有减小。2 MPa压差下,补偿后正返行程死区范围为3%;正行程流量的线性度为5.00%;返行程流量的线性度为3.56%。提出的方法对于无阀芯位置反馈的死区补偿和流量补偿有实际意义。
猜你喜欢
工程数学学报(2020年6期)2021-01-09 02:44:40
塑料包装(2020年4期)2020-09-24 01:19:26
塑料包装(2020年1期)2020-04-09 07:06:28
石油石化绿色低碳(2019年6期)2019-01-14 01:16:20
通信电源技术(2018年3期)2018-06-26 08:05:42
电气化铁道(2017年1期)2017-04-16 06:00:17
航空兵器(2016年5期)2016-12-10 17:14:13
浙江大学学报(工学版)(2015年6期)2015-03-01 01:18:35
应用数学与计算数学学报(2014年1期)2014-09-26 12:19:03
电测与仪表(2014年18期)2014-04-04 12:33:08
