考虑高维不确定性的热电联产虚拟电厂优化调度
2023-02-22 13:56元志伟于松源刘吉臻
动力工程学报 2023年2期
元志伟, 于松源, 房 方, 刘吉臻,2
(1.华北电力大学 控制与计算机工程学院,北京 102206;2.华北电力大学 新能源电力系统国家重点实验室,北京 102206)
可再生能源出力具有随机性和波动性特征,其规模化并网会对电力系统的安全稳定运行产生显著影响[1]。我国“三北”地区热电联产(Combined Heat and Power,CHP)机组[2]在供热季通常采用“以热定电”的运行方式,一定程度上限制了调度运行的灵活性。可再生能源和CHP机组分别独立接入电网,而配电网通常采取被动接入方式[3],通过升级改造适应其接入需求来保障用电可靠性,但此管理方式不仅会损失双方经济效益,还会产生诸多稳定运行问题。虚拟电厂(Virtual Power Plant,VPP)对各种能源的组成、地理位置和运行特性没有特定约束,可以充分利用各种能源的互补优势,为电力系统提供一种新兴的具有高度灵活性和适应性的多能源管理方式[4]。
热电联产虚拟电厂(Combined Heat and Power-Virtual Power Plant,CHP-VPP)通过聚合CHP机组和可再生能源发电机组,同时辅以储能装置、可控负荷等,在信息和通信技术支持下可以实现热电能量的协同管理。在CHP-VPP的调控过程中存在诸多不确定性,如风光出力不确定性[5-7]、电热负荷不确定性[8-10]等。各种不确定性参数的历史数据量大、特征庞杂,且关联性复杂,具备电力高维数据的典型特征。多种不确定因素叠加会导致系统不确定性变量的维数增加。研究人员对多种不确定因素进行了研究。Baringo等[5]分别使用区间优化和场景法建立了风电出力不确定因素和市场电价不确定因素模糊集;Babaei等[8]使用场景法分别建立了电价、电负荷、风电出力、光伏出力不确定模型。现有文献通常是对各种不确定因素分别进行建模,因而忽略了其相关性。
目前,针对不确定性因素的研究方法主要有随机优化[11-13]和鲁棒优化[14-16]。随机优化可分为场景法[9-11]、机会约束法[12-13]、条件风险价值[17-18]等。随机优化存在无法精确描述概率分布的缺点,大量的场景计算也给系统带来求解困难。鲁棒优化是根据历史预测误差或运行经验将该参数的波动范围表示为集合(即不确定集),搜索不确定集的“最恶劣”场景,并计算得到该场景下的最优决策方案。
能量流与信息流的深度融合使得针对能源系统的海量数据挖掘成为可能。基于数据驱动方法的可再生能源和负荷聚类过程有利于确定能量供需关系,为制定调度策略提供参考。高斯混合模型[19]、k-means[20]聚类等传统聚类方法需要事先指定簇的数量,然而高维不确定数据往往具有复杂甚至未知的概率分布,难以准确提取数据中的有效信息。狄利克雷过程混合模型(Dirichlet Process Mixture Model,DPMM)作为一种非参数贝叶斯模型,无需事先指定模型的具体参数和混合组数,避免了人为干预,可有效提取高维不确定信息。利用DPMM结合变分推断算法进行聚类,根据聚类的结果以及相应概率信息构建模糊集,可以直接嵌套到不确定优化问题中。
综上分析,笔者结合随机优化和鲁棒优化的优点,提出一种考虑高维不确定性的两阶段随机鲁棒优化调度策略。基于DPMM和变分推断算法构建了风电出力-光伏出力-电负荷-热负荷高维数据驱动不确定模糊集,通过随机鲁棒方法建立CHP-VPP参与日前和实时市场调度模型,开发了加速列与约束生成(Accelerated Column-and-Constraint Generation,AC&CG)算法来进行模型求解,通过算例分析对比验证了所提方法的有效性。
1 数据驱动的高维不确定性建模
数据聚类是数据挖掘的有效手段之一,应用DPMM和变分推断算法对高维不确定数据进行聚类,可以将聚类结果用于构建不确定模糊集,进而为CHP-VPP优化调度奠定基础。
1.1 基于DPMM的数据聚类
CHP-VPP不确定数据集为U={u1,u2,…,un},ui={Pw,t,i,Pv,t,i,Pload,t,i,Hload,t,i},其中i=1,2,…,n,Pw,t,i、Pv,t,i、Pload,t,i、Hload,t,i分别为t时刻第i个数据集中的风电出力、光伏出力、电负荷和热负荷,假定待聚类的不确定数据{u1,u2,…,un}服从参数为{θ1,θ2,…,θn}的分布,n个数据有n个参数θ,来源于同一θ的数据可被聚为一类,因此可将其聚类为k簇(k≤n)。参数θ来自狄利克雷过程(Dirichlet Process,DP),DP是狄利克雷分布在无限维度中的扩展,被当作DPMM的先验分布,其定义为假设G为一个测度空间上的随机概率分布,将测度空间任意划分为a1,a2,…,ak,而G(a1),G(a2),…,G(ak)服从狄利克雷分布,表示为:
(G(a1),G(a2),…,G(ak))~DIR(∂H(a1),
∂H(a2),…,∂H(ak))
(1)
式中:∂为超参数,用来表征G的离散程度,∂>0;H为基分布;G(ak)、H(ak)分别为G和H在空间ak中的测度。
此过程记为G~DP(∂,H)。狄利克雷分布是多项式分布的共轭先验,即当先验分布为狄利克雷分布、似然分布为多项式分布时,其后验分布仍为狄利克雷分布,因此具有聚簇的性质。对于DP,假设从G中抽样出观测值{θ1,θ2,…,θk},该观测值的后验分布满足:
P(G(a1),G(a2),…,G(ak)|N1,N2,…,Nk)~
DIR(∂H(a1)+N1,∂H(a2)+N2,…,
(2)
式中:Ni为观测值θi的数量;δθi为在θi处的Delta函数;N为总观测次数;P为发生的概率。
由于DP无法直接采样,可通过折棍构造来描述:
(3)
式中:πi为棍子长度,可以看作一个无穷序列的权重,组成矩阵π=[π1π2…π∞],每个混合模型的权重满足0≤πi≤1;βi为从棍子剩余部分折下来的比例,服从Beta分布;α为Beta分布的参数。
对于风电出力、光伏出力、电负荷、热负荷数据集{u1,u2,…,un},引入隐含变量{s1,s2,…,sk}来表示其类别标签,聚为同一类的数据具有相同的标签。因此DPMM可表示为:
(4)
式中:θsj为标签sj所属分布的参数;P(ui|θsj)为ui的概率分布;j=1,2,…,k。
1.2 基于变分推断算法的参数估计
由于CHP-VPP调度模型中难以根据{u1,u2,…,un}和隐含变量{s1,…,sk}直接计算出隐含变量的后验分布。因此,本文采用变分推断算法来近似计算后验分布,其基本思想是寻找一类易于处理的最优近似分布族来近似估计隐含变量的后验分布,其通过最大化对数似然函数下界得到模型的参数估计,具有计算成本低、收敛速度快等优点。假设风电出力、光伏出力、电负荷、热负荷等不确定数据符合高斯混合模型,相应参数包括均值向量μ、精度矩阵v,所有参数集合为Θ={μ,v}。在变分推断中,对数边际概率可分为2部分:
lnp(U)=ELBO(q)+KL(q∥p)
(5)
(6)
(7)
式中:ELBO为证据下界;KL为KL散度;p为真实的后验分布;q为衡量真实后验分布的近似分布。
KL散度也称为相对熵,可以衡量2个随机分布之间的距离。当2个随机分布相同时,其相对熵为0;当2个随机分布的差别增大时,其相对熵也会增大。如果用q(Θ)来近似描述p(Θ|U),KL散度应尽可能小。因为lnp(U)为常数,所以ELBO(q)应尽可能大。当ELBO(q)达到最优值时,算法结束,此时获得所有参数,将相同参数归为一类,得到聚类结果。
1.3 不确定数据模糊集构建
基于从DPMM和变分推断算法中提取的信息,将CHP-VPP不确定数据按照标签分成若干簇,每一簇都包含标签信息和不确定数据,不确定数据的概率用多项式分布描述,采用最大似然估计得到各个数据簇的概率。
(8)
式中:ρk为第k簇的概率;L为不确定数据总数;F为指标函数。
指标函数F定义为:
(9)
基于变分推断结果,使用1范数和∞范数构造数据驱动不确定性集。
U=U1∪U2∪…∪Uk
(10)
(11)
式中:Uk为第k簇不确定模糊集;Λk为比例因子;ψk、λk、ωk、μk均为从第k簇不确定数据推断出的结果;φk为不确定边界值;z为辅助向量。
2 CHP-VPP两阶段随机鲁棒优化
CHP-VPP两阶段随机鲁棒优化包括日前调度阶段和实时调度阶段。在日前调度阶段,制定CHP机组出力计划,确定与日前市场的交易量,这些决策一旦确定不可更改;之后假设CHP-VPP面临“最恶劣”情况,即出现使实时阶段调度目标函数(利润)最小的情况;在实时调度阶段,CHP-VPP在符合“最恶劣”情况以及上述决策的前提下,通过调整灵活性资源以及与实时市场交易来获得最大利润。两阶段优化框架如图1所示。

图1 CHP-VPP两阶段优化框架
2.1 总目标函数及约束条件
CHP-VPP两阶段随机鲁棒优化模型以总收益最大为目标函数,考虑了机组运行成本、碳排放成本、可中断负荷成本等,其总目标函数为:
(12)
ΘL1,t={Pt,da,Pt,chp,Ht,chp}
ΘL2,t={Pt,w,Pt,v,Pt,load,Ht,load}
ΘL3,t={Pt,rt,Pt,hp,Pt,pesc,Pt,pesd,Pt,elcurt}
式中:ΘL1,t、ΘL2,t和ΘL3,t分别为各自调度阶段的调度变量集合;rel、rheat分别为电价和热价;t为调度时间;Pt,da、Pt,rt分别为日前和实时市场CHP-VPP与电网交易的电量,为正值表示卖电,为负值表示买电;Pt,chp为CHP机组发电量;Ht,chp为CHP机组供热量;Pt,hp为热泵消耗的电量;Pt,pesc、Pt,pesd分别为蓄电池充、放电量;Pt,elcurt为中断负荷量;Pt,w、Pt,v、Pt,load、Ht,load分别为风电出力、光伏出力、电负荷和热负荷;nchp为CHP机组个数;f(Pt,rt)为CHP-VPP在实时市场中交易的收益函数;Ct,chp、Ct,cb、Ct,c、Ct,s分别为CHP机组运行成本、碳排放成本、可中断负荷成本和储能装置运行成本;Ha,t,chp为第a台CHP机组的供热量。
2.2 日前调度阶段目标函数及约束条件
日前调度阶段目标函数为:
(13)
(14)
(15)
式中:λt,cl为煤价格;Hcl为煤热值;rcb为碳交易价格;ηcb,chp为CHP机组碳排放强度;ηcb,free为碳排放补贴配额系数;Pa,t,chp为第a台CHP机组发电量。
日前调度阶段约束条件如下:
(1) 热功率平衡约束
(16)
式中:Ho,t,hp*为实时调度阶段所求得的第o台热泵产热量;nhp为HP机组个数。
(2) 电功率平衡约束
Pt,load+Bij(γi,t-γj,t)
(17)
式中:Pt,rt*、Pt,w*、Pt,v*、Pt,elcurt*、Pt,pesc*、Pt,pesd*分别为在实时调度阶段得到的实时市场交易量、风电出力、光伏出力、可中断负荷量、储电量和放电量;Po,t,hp为第o台HP机组消耗电量;Bij为节点i与节点j之间的电纳;γi,t为节点i的电压相角;γj,t为节点j的电压相角。
(3) CHP机组约束
(18)
式中:hmax为CHP热出力最大值;pmin、pmax分别为CHP电出力最小值和最大值;hmed、cm、cv均为常数。
(4) 热电联产机组爬坡率约束
-Crdown≤Pa,t,chp-Pa,t-1,chp≤Crup
(19)
式中:Crdown、Crup分别为热电联产机组向下和向上爬坡率。
(5) 日前市场交易量约束
Pt,damin≤Pt,da≤Pt,damax
(20)
式中:Pt,damax、Pt,damin分别为CHP-VPP日前市场交易量的上、下界。
(6) 电网约束
-Pij,max≤Bij(γi,t-γj,t)≤Pij,max
(21)
式中:Pij,max为节点i与j之间传输线路的最大传输功率。
(7) 热网约束
Qf=cqm,g(Ts,f-Tr,f)
(22)
qm,g,min≤qm,g≤qm,g,max
(23)
式中:Qf为热网节点f的传输热量;c为水的比热容;qm,g为热网管道g中的传输质量流量;qm,g,max、qm,g,min分别为传输质量流量上、下限;Ts,f、Tr,f分别为供、回水温度。
2.3 实时调度阶段目标函数及约束条件
实时调度阶段目标函数为:
(24)
(25)
Ct,c=rt,cPt,elcurt
(26)
Ct,s=rr,es(Pt,pesc+Pt,pesd)
(27)
式中:rel,buy、rel,sell分别为CHP-VPP与实时市场交易的买、卖电价;Pt,rtbuy、Pt,rtsell分别为CHP-VPP与实时市场交易的买、卖电量;rt,c为补偿用户中断负荷价格;rt,es为充放电成本。
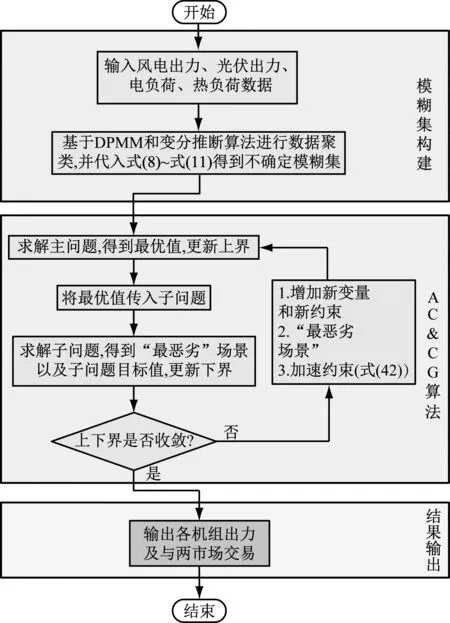
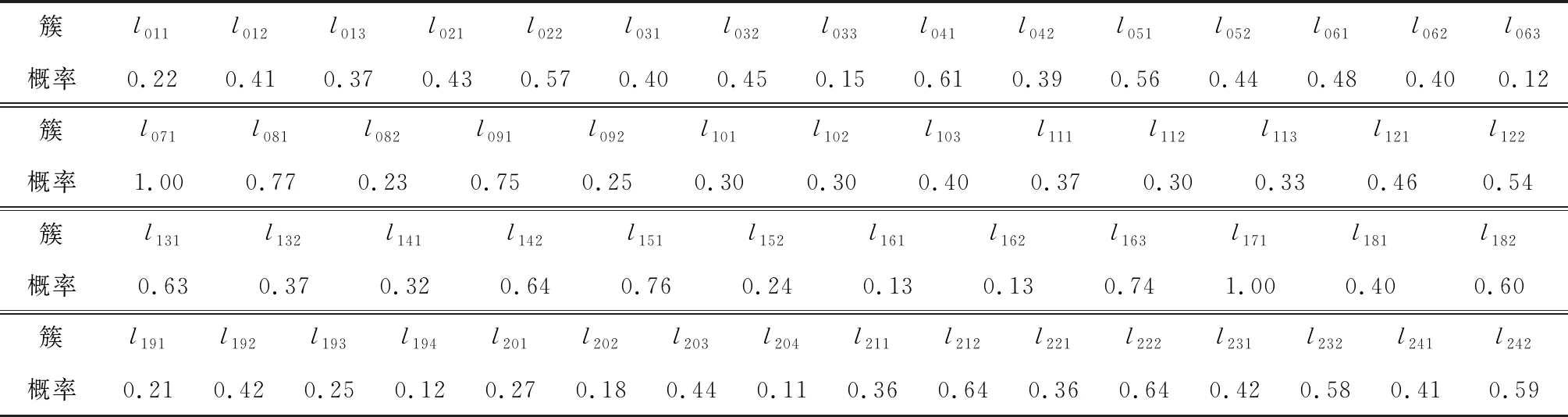
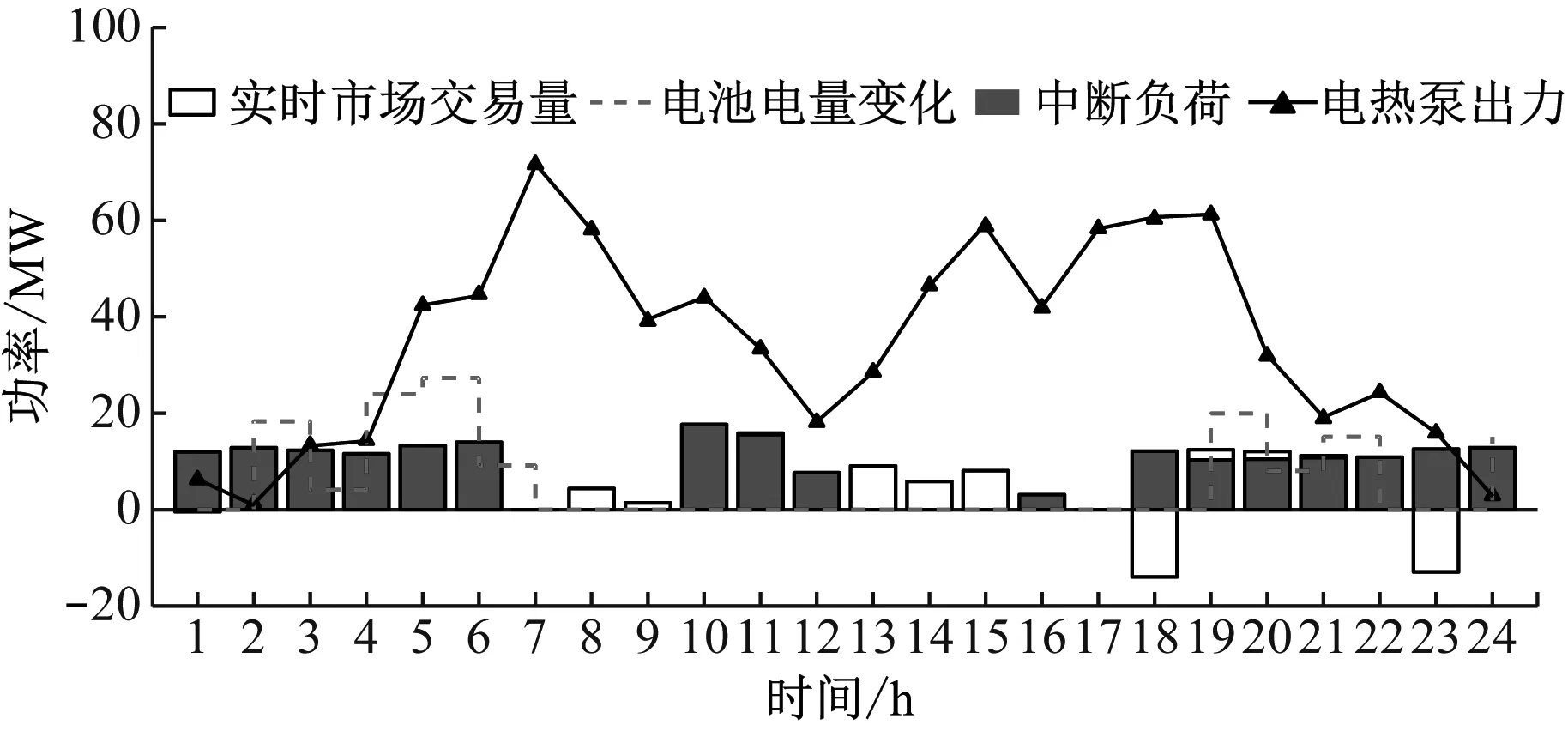
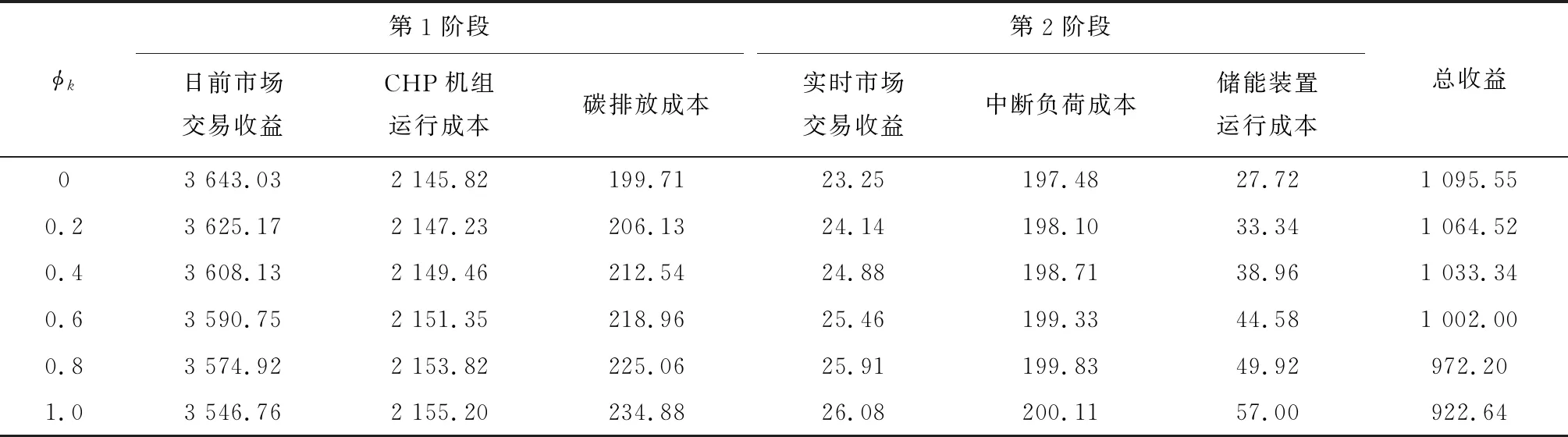
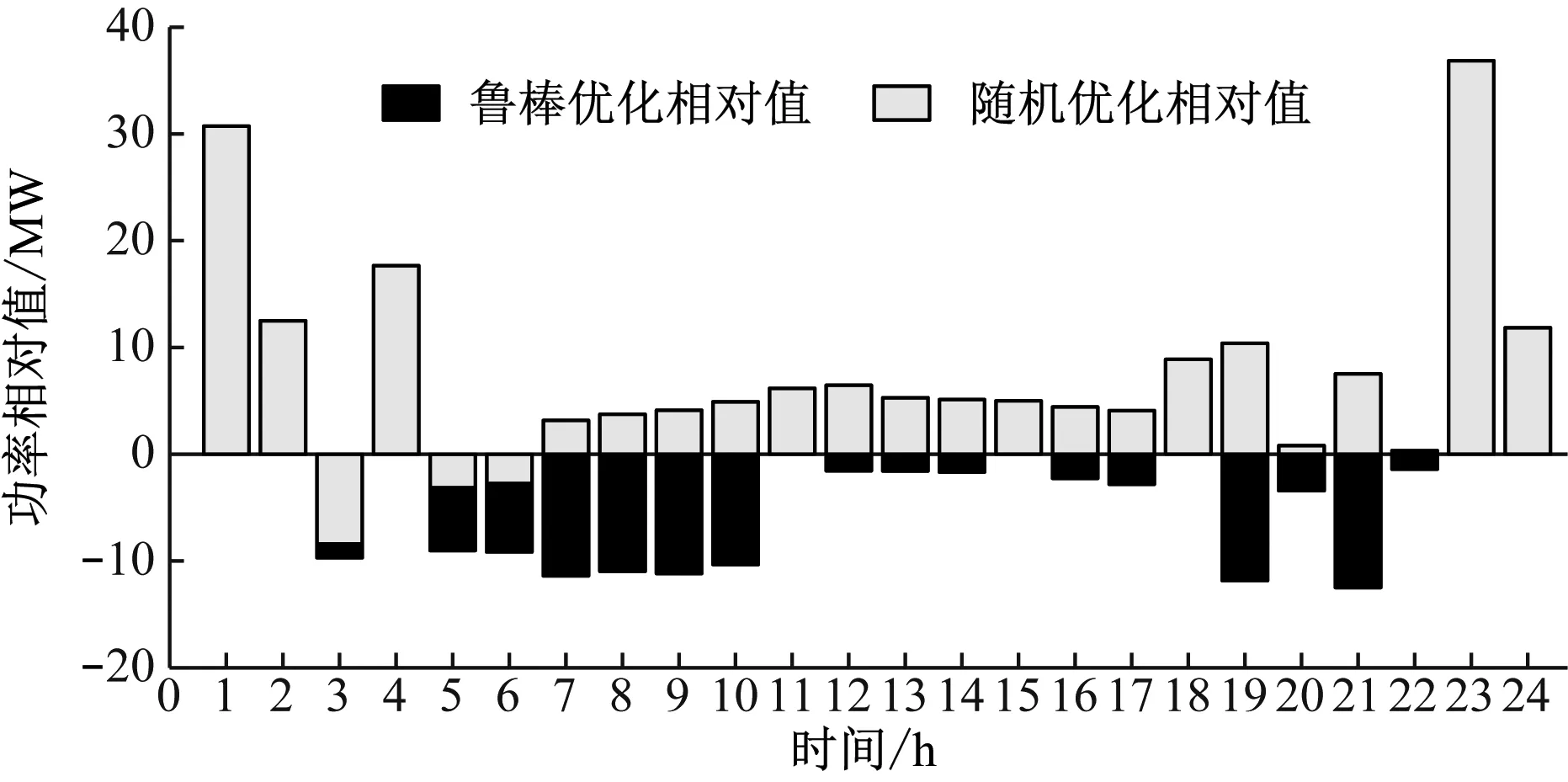
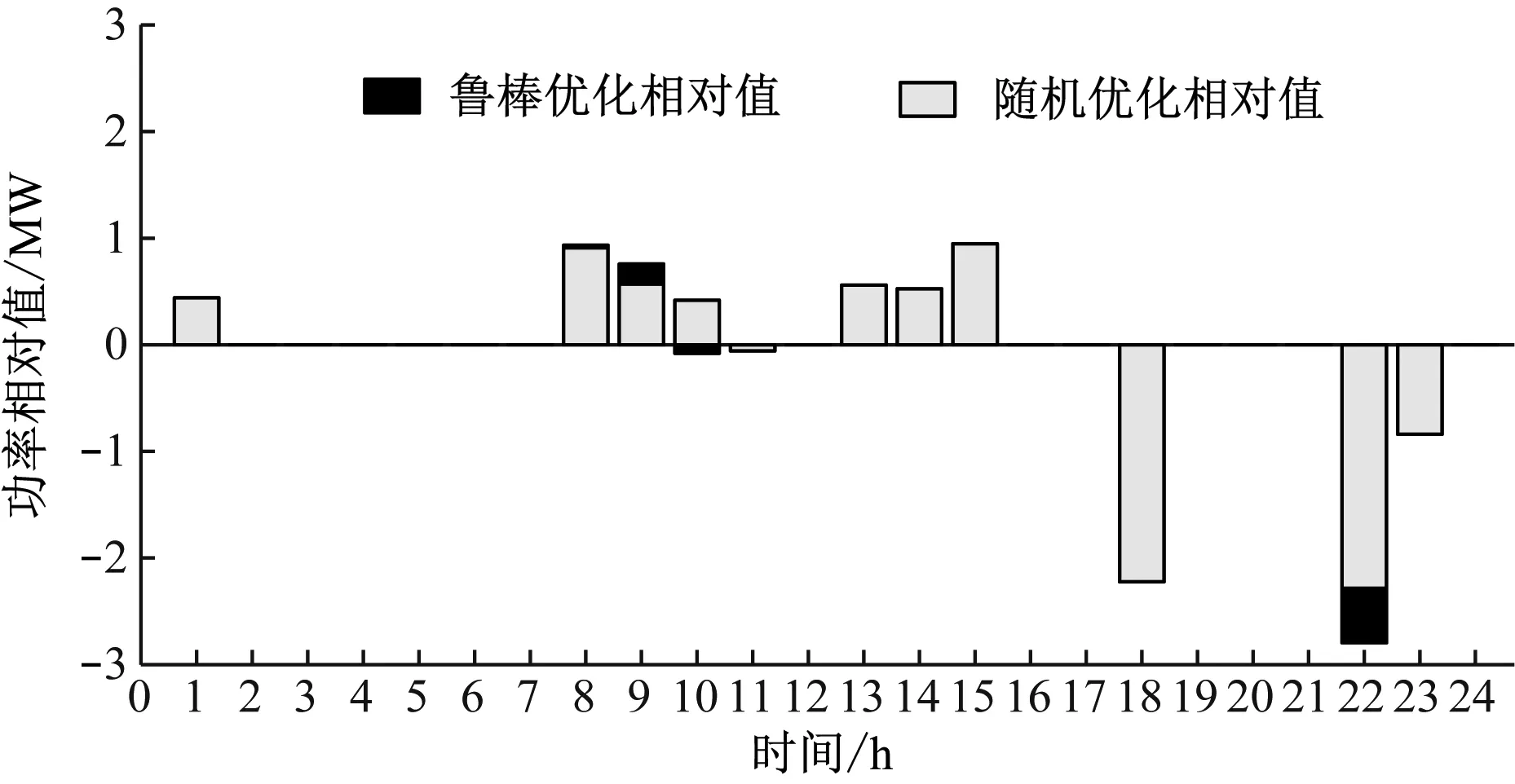
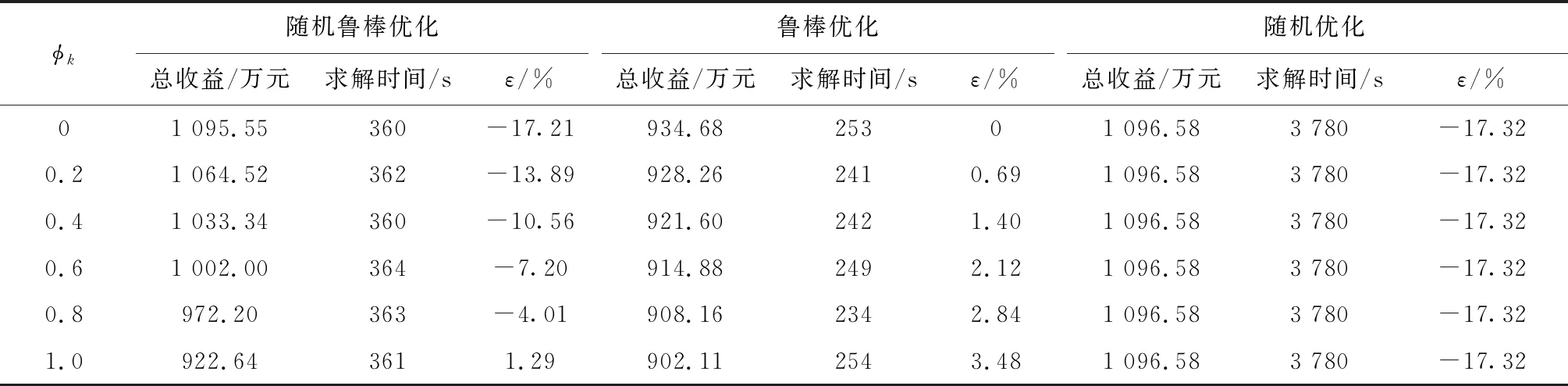
为防止两市场套利,实时市场的买电价格高于日前市场的买电价格,实时市场的卖电价格低于日前市场的卖电价格,即rel,buy>rel,rel,sell 实时调度阶段约束条件如下: (1) 热功率平衡约束 (28) 式中:Ha,t,chp′为日前调度阶段得到的CHP热出力;Ho,t,hp为电热泵出力。 (2) 电功率平衡约束 Pt,elcurt-Pt,pesc+Pt,pesd-Pt,load (29) 式中:Pt,da′、Pa,t,chp′分别为日前调度阶段得到的日前市场交易量和CHP电出力。 (3) 实时市场交易量约束 (30) 式中:Pt,rtmax、Pt,rtmin分别为实时市场交易电量的上、下限。 (4) 电热泵出力约束 (31) 式中:ηhp为电热泵电热转换效率;Pt,hpmax为电热泵耗电上限。 (5) 中断负荷约束 0≤Pt,elcurt≤Pt,elcurtmax (32) 式中:Pt,elcurtmax为中断负荷上限。 终端用户可调整用电负荷以响应CHP-VPP调度决策,其减小的负荷被设置在一定范围内。 (6) 蓄电池容量及充、放电约束 (33) St,esmin≤St,es≤St,esmax (34) 0≤Pt,pesc≤Pt,cmax (35) 0≤Pt,pesd≤Pt,dmax (36) 式中:St,es为t时刻蓄电池内部现存的电量;St,esmax、St,esmin分别为蓄电池容量上、下限;Pt,cmax、Pt,dmax分别为充、放电功率上限;ηpesc、ηpsesd分别为蓄电池充电效率和放电效率。 电网约束的计算见式(21),热网约束的计算见式(22)和式(23)。 为方便表达,将式(12)~式(36)所提出的两阶段随机鲁棒优化模型以矩阵形式描述。 (37) 式中:y为第1阶段调度变量矩阵,具体包含日前市场交易量Pt,da、CHP电出力Pt,chp和热出力Ht,chp;xk为第2阶段第k簇所对应的调度变量矩阵,具体为实时市场交易量Pt,rt、蓄电池充放电量Pt,pesc、Pt,pesd、电热泵出力Ht,hp、中断负荷量Pt,elcurt;c、b、A、d、D、h、E、M均为常数矩阵;Sx、Sy分别为变量矩阵x和变量矩阵y的集合;Ω(y,u)为受y和u影响的xk的取值范围;E表示数学期望。 AC&CG算法的原理是利用传统列与约束生成(C&CG)算法将两阶段问题分解为主问题和子问题,然后采用加速策略加速上下界的收敛过程,以减少运行时间。在每次迭代中,子问题将最优解传递给主问题,并且在主问题中会添加新变量和额外约束。主问题的描述如下: (38) 式中:ζ为辅助变量;xk,l为第k簇新添加的变量;l=1,2,…,v,其中v为当前迭代次数;O为解空间;u*为“最恶劣”场景中的不确定值。 求解上述第v+1次迭代时的最优化问题,得到最优解(yv+1*,ζv+1*,xk,1*,xk,2*,…,xk,v*),其中yv+1*为第v+1次迭代求得变量矩阵y的最优值,ζv+1*为第v+1次迭代求得辅助变量ζ的最优值,xk,l*为第k簇第v+1次迭代求得第l条额外约束中xk,l的最优值,l=1,2,…,v;更新AC&CG算法的上界UB=cTyv+1*+ζv+1*。 子问题是在接收主问题给定的yv+1*下寻找风电出力、光伏出力、电负荷、热负荷“最恶劣”场景,并将其返回给主问题。子问题的描述如下: (39) 式中:Q(y)为受y影响的关于x的目标函数。 子问题为min-max结构,不能直接求解,可基于拉格朗日对偶理论将其转化为单层问题后求解。由于转化为单层问题后会出现双线性乘积非线性项,可采用专业的非线性求解器Ipopt进行求解。求解以上最优化问题,得到最优值Q(yv+1*),更新AC&CG算法的下界LB=max{LB,cTyv+1*+Q(yv+1*) },并返回给主问题。若AC&CG算法的上、下界相等,则结束迭代,否则令v=v+1,添加新变量和额外约束,重复上述步骤。 采用加速策略,每次迭代后向主问题加入额外约束,能够使算法更快收敛,减少运行时间。根据文献[21],首先构建如下问题,识别松弛约束和非松弛约束。 (40) 式中:I为数值特别大的常数;φ和χ分别为松弛的二进制变量和连续实数矩阵;χij为连续实数矩阵中的元素。 求解式(40)后,约束Dxk,l可分为2类,一类为χ中元素为0,该约束为非松弛约束;另一类为χ中元素不为0,该约束为松弛约束。基于不同类型约束,进而构造以下问题: (41) 将xk,l按照约束类型不同分为xk,l,1和xk,l,2, 将yv+1*按照约束类型不同分为yv+1,1*和yv+1,2*, 将u*按照约束类型不同分为u1*和u2*。 由此得到最优值xk,l*,向主问题返回以下额外约束: bTxk,l*-r1(yv+1,1-yv+1,1*)- r2(yv+1,2-yv+1,2*)≥0 (42) 式中:r1、r2分别为非松弛约束和松弛约束对应的对偶变量;yv+1,1、yv+1,2分别为非松弛约束和松弛约束第v+1次迭代的变量矩阵。 CHP-VPP两阶段优化求解流程如图2所示。 图2 CHP-VPP模型求解流程 为验证所提方法的有效性,采用某地区冬季近3年的风电出力、光伏出力、电负荷和热负荷数据,每小时数据为一组,共8 304组。将每组数据以小时为单位进行聚类仿真测试。将CHP-VPP两阶段随机鲁棒优化调度模型应用在改进的IEEE-30节点电力系统+14节点供热系统[22]中,热电耦合网络框架如图3所示。其中,WPP表示风电场,PV表示光伏电厂,ESS表示蓄电池,HP表示热泵,节点数字前E表示该节点为电力系统节点,节点数字前H表示该节点为热力系统节点。CHP-VPP系统的2台220 MW热电联产机组分别连接在E19节点和E25节点上,4台20 MW热泵分别连接在E16、E9、E21、E27节点上,4台容量为25 MW的蓄电池分别连接在E2、E7、E8、E6节点上,1个220 MW风电场连接在E8节点上,1个150 MW光伏电厂连接在E3节点上。 图3 CHP-VPP热电耦合网络框架 使用DPMM和变分推断算法将24 h内风电出力、光伏出力、电负荷和热负荷数据按小时进行聚类,各小时标签及概率信息如表1所示。其中,l表示簇的名称,l下标前2个数字表示时间,第3个数字表示簇,如l011表示第1 h、第1簇。 表1 不确定数据集各小时聚类结果 仅以第14 h聚类结果为例进行展示,如图4所示。非对角线图像是将四维图像投影在二维平面上形成的,用来展示风电出力、光伏出力、电负荷、热负荷两两不确定数据之间的相关性,对角线图像为各不确定数据的分布直方图。从图4可以看出,第14 h风电出力、光伏出力、电负荷、热负荷四维数据被聚类为2簇。整体上看,簇1数据多于簇2数据,因此以簇1为代表的不确定数据在未来发生的概率也较高。在光伏出力上,簇1数据的特点是出力较低,数据集中,簇2数据出力较高,数据分散;在热负荷上,簇2数据比较集中,簇1数据则比较分散;在电负荷和风电出力上,2簇数据无明显区分。 图4 第14 h聚类结果 应用Yalmip工具箱分别调用Cplex求解器和Ipopt求解器求解主问题和子问题,经济调度周期为24 h,时间间隔为1 h。基于Matlab中tic函数和toc函数求解时间。利用AC&CG算法的求解时间为361 s,传统C&CG算法的求解时间为455 s,求解时间减少了20.65%。 将各小时聚类结果用于构建第2阶段不确定模糊集,通过求解最优化问题(式(37))得到日前调度阶段和实时调度阶段的决策变量,调度决策如图5和图6所示。 图6 基于随机鲁棒优化的实时市场调度结果 从第1 h~第6 h以及第21 h~第24 h,电负荷和热负荷较低,CHP-VPP自身总供电量大于负荷需求时,在日前市场上将向电网售电,在实时市场上进行少量电能交易,保证总功率与负荷相等,同时CHP-VPP存储一定电量作为备用能源。从第7 h~第20 h,用户开始一天的工作,电负荷和热负荷需求上升。为满足负荷需求,CHP-VPP在日前市场上向电网进行购电操作,电热泵功率运转达到最大,电池放电,同时在实时市场上进行少量电能交易,保证总功率与负荷相等。 不确定边界值φk对优化调度结果经济性的影响如表2所示。模糊集不确定边界值φk变化范围为0~1.0,间隔为0.2,对应计算出第1阶段和第2阶段收益及成本情况。 从表2可以看出,随着φk的增大,系统的总收益降低,CHP-VPP各项成本升高。这是由于不确定边界值越大,第2阶段向第1阶段传递的场景就越“恶劣”,为满足负荷需求,系统将减少卖电量,增加买电量,致使系统收益降低。 表2 不确定边界值对优化调度结果的影响 不确定边界值φk决定了系统对“最恶劣”场景的接受程度,需要决策者根据实际情况设定合理的不确定边界值,兼顾保守性和经济性。 为验证优化方法的有效性,本文选用置信度为98%的鲁棒优化方法和多场景描述的随机优化方法作为比较。图7和图8分别给出了日前市场和实时市场中鲁棒优化、随机优化与随机鲁棒优化间交易相对值的调度结果。 图7 日前市场鲁棒优化和随机优化与随机鲁棒优化间交易相对值 图8 实时市场鲁棒优化和随机优化与随机鲁棒优化间交易相对值 从图7和图8可以看出,3种优化方法差异主要体现在日前市场交易值上,由于鲁棒优化考虑了更“恶劣”的情形,会在日前市场购买更多的电能以保证CHP-VPP稳定运行,因此调度决策会更加保守。相反,随机优化则购买较少的电功率,因此收益更高。为描述不同优化方法的鲁棒性能,定义鲁棒系数ε为: (43) 式中:P(φk)为不同优化方法下在不同不确定边界值下的收益;P(φ0)为采用鲁棒优化方法时在不确定边界值为0对应的基准值。 鲁棒优化不确定边界值为0时为确定性优化,ε越大,鲁棒性越强。 表3给出了不同方法下总收益、求解时间以及鲁棒系数随不确定边界值变化的情况。从表3可以看出,随机鲁棒优化方法的总收益高于鲁棒优化方法,但低于随机优化方法。这是因为随机鲁棒优化方法考虑了“最恶劣”场景,会导致总收益低于随机优化方法;同时随机鲁棒优化方法中加入了概率信息,减小了小概率低收益场景对整个系统的影响,因此总收益高于鲁棒优化方法。随机鲁棒优化方法求解时间略高于鲁棒优化方法,远远低于随机优化方法。这是因为随机鲁棒优化方法比鲁棒优化方法复杂,在计算“最恶劣”场景时考虑了辅助变量控制不同不确定因素间的相关性,同时还加入了概率信息,所以计算时间略长;随机鲁棒优化方法避免了随机优化方法所需的多个场景下的期望收益计算,因此计算时间会远低于随机优化。随着φk的增大,随机鲁棒优化方法的鲁棒性增强。对于同一个不确定值,随机鲁棒优化方法的鲁棒性低于鲁棒优化方法,但显著高于随机优化方法。这是因为随着φk的增大,不确定数据范围增大,鲁棒性增加,随机优化无波动范围,仅满足特定场景下的约束,因此随机鲁棒优化方法的鲁棒性优于随机优化方法;同时由于随机鲁棒优化方法加入了概率信息,以概率量化了不同场景出现的可能性,其鲁棒性低于鲁棒优化方法。 表3 不同优化方法结果对比 综合经济性、求解效率以及鲁棒性,随机鲁棒优化方法更适用于CHP-VPP两阶段优化。 (1) 随机鲁棒优化方法的收益介于鲁棒优化和随机优化之间,其调度结果实现了CHP-VPP经济性和鲁棒性的均衡。此外,相比于传统C&CG算法,AC&CG算法的求解时间减少了20.65%。 (2) 模糊集中不确定边界值与CHP-VPP收益呈负相关,随着不确定边界值的增大,系统的收益降低,鲁棒性增加。决策者可根据实际情况设定合适的不确定边界值,以此来兼顾鲁棒性和经济性。3 两阶段随机鲁棒优化求解
3.1 两阶段随机鲁棒优化矩阵模型
3.2 基于AC&CG算法的优化策略求解
4 算例分析

4.1 高维不确定数据聚类结果

4.2 调度决策结果
4.3 不确定边界值对调度结果影响分析
4.4 不同优化方法对比分析
5 结 论
猜你喜欢
数学年刊A辑(中文版)(2020年1期)2020-05-19
自动化学报(2019年6期)2019-07-23
自动化学报(2017年4期)2017-06-15
公民与法治(2016年8期)2016-05-17
电测与仪表(2016年23期)2016-04-12
河南电力(2016年5期)2016-02-06
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
浙江大学学报(工学版)(2015年1期)2015-03-01
人生十六七(2015年6期)2015-02-28
汽车零部件(2014年2期)2014-03-11