
高斯势分段双稳随机共振在不同噪声下的轴承故障诊断
2023-02-22 15:03:54贺利芳刘秋玲
振动与冲击 2023年3期
贺利芳, 刘秋玲, 张 刚
(重庆邮电大学 通信与信息工程学院, 重庆 400065)
微弱信号诊断广泛应用于物理学、地理学、数学、理工学、自然学等多个领域,是20世纪以来广大学者的重点研究对象[1]。微弱信号诊断是指将多种技术手段应用于强度很小的、淹没在强背景噪声中的微弱信号诊断的关键技术,如:经验模态分解法[2]、频谱校正法[3]、奇异值分解法[4]、小波分解法[5]、基于变尺度变换的经验模态分解法[6]等技术。早在20世纪,Benzi等[7]在探究冰川问题时首次提出随机共振(stochastic resonance, SR)。此后,学者们不断探索出更新颖的SR理论,如非周期随机共振理论[8]、绝热近似理论[9]。其中,微弱信号提取主要有以下两种技术手段:一是抑制噪声,如时域和频域分析、诊断等技术,利用信号和噪声之间的差异抑制噪声;二是提高信号强度,如通过非线性方程将噪声能量转换为信号能量,实现信号能量的提高。SR是信号、噪声、非线性系统共同作用的结果[10]。针对经典双稳随机共振(classical bistable stochastic resonance, CBSR)信噪比(signal-to-noise ratio, SNR)较低的问题,更多新型势函数模型被提出:王慧等[11]提出更简洁的阱深更浅阱宽更宽的非饱和势函数,并利用绝热近似理论得到最佳SNR,从而实现SR;周玉飞等[12]研究级联双稳系统实现能量转化;靳艳飞等[13]研究加性和乘性三值噪声激励下周期势系统的动力学分析;随后,杜太行等[14]提出高斯周期势随机共振,并应用于无线电弱信号检测中;张刚等[15]将简谐势模型与高斯势模型结合,在Duffing方程下研究指数型SR在工程的有效性。但是大多数研究都是在高斯白噪声的条件下进行的,而现实中的噪声特性很难符合高斯白噪声,更多是接近色噪声[16]。因此,孙万麟等[17]在色噪声作用下研究了二阶线性系统中的SR现象;廖勇[18]研究了在Levy噪声下复原微弱信号;时培明等[19]针对时延提出一种基于时延反馈多稳随机共振的微弱信号检测的方法。
参数优化是不同势函数在不同噪声背景下获得最佳性能的一个不可或缺的过程,因此,很多优化算法陆续被提出,如粒子群算法[20]、遗传算法[21]、混合智能算法[22]、人工鱼群算法[23]、果蝇算法[24]等。
基于以上研究,为解决CBSR系统中高阶项带来的SNR较低问题,本文提出一种高斯势分段双稳势函数,其阱宽更宽、阱深更深。并通过四阶龙格库塔法进行数值仿真,在高斯白噪声和色噪声背景下研究系统各参数a3,b3,v,R对SNR和平均信噪比增益(mean signal-to-noise ratio increase, MSNRI)的影响,并与CBSR系统和分段双稳随机共振非饱和分段双稳随机共振(unsaturated piecewise bistable stochastic resonance, UPBSR)系统进行比较。最后,在两种不同噪声背景下,将高斯势分段双稳随机共振(Gaussian potential piecewise bistable stochastic resonance, GPPBSR)和UPBSR系统均运用于6205-2RS JEM SKF和HRB 6205-2Z两种型号的轴承故障诊断中,证明其GPPBSR在轴承故障诊断中的可行性。
1 传统系统模型
1.1 UPBSR模型
过阻尼条件下,随机共振的郎之万方程和CBSR势函数分别为式(1)和式(2)
(1)
(2)
式中:ε(t)=Asin(ωt)为周期信号;η(t)为均值为0,强度为D的高斯白噪声,且满足〈η(t)〉=0,〈η(t)η(t+τ)〉=2Dδ(τ)。由于CBSR系统产生SR需要更多能量,所以学者们在CBSR的基础上构造出UPBSR,如式(3)
(3)
1.2 高斯势(GP)函数模型
高斯势(Gaussian potential,GP)模型一般广泛应用于描述复核散射现象的核物理学中,其模型为式(4)
(4)
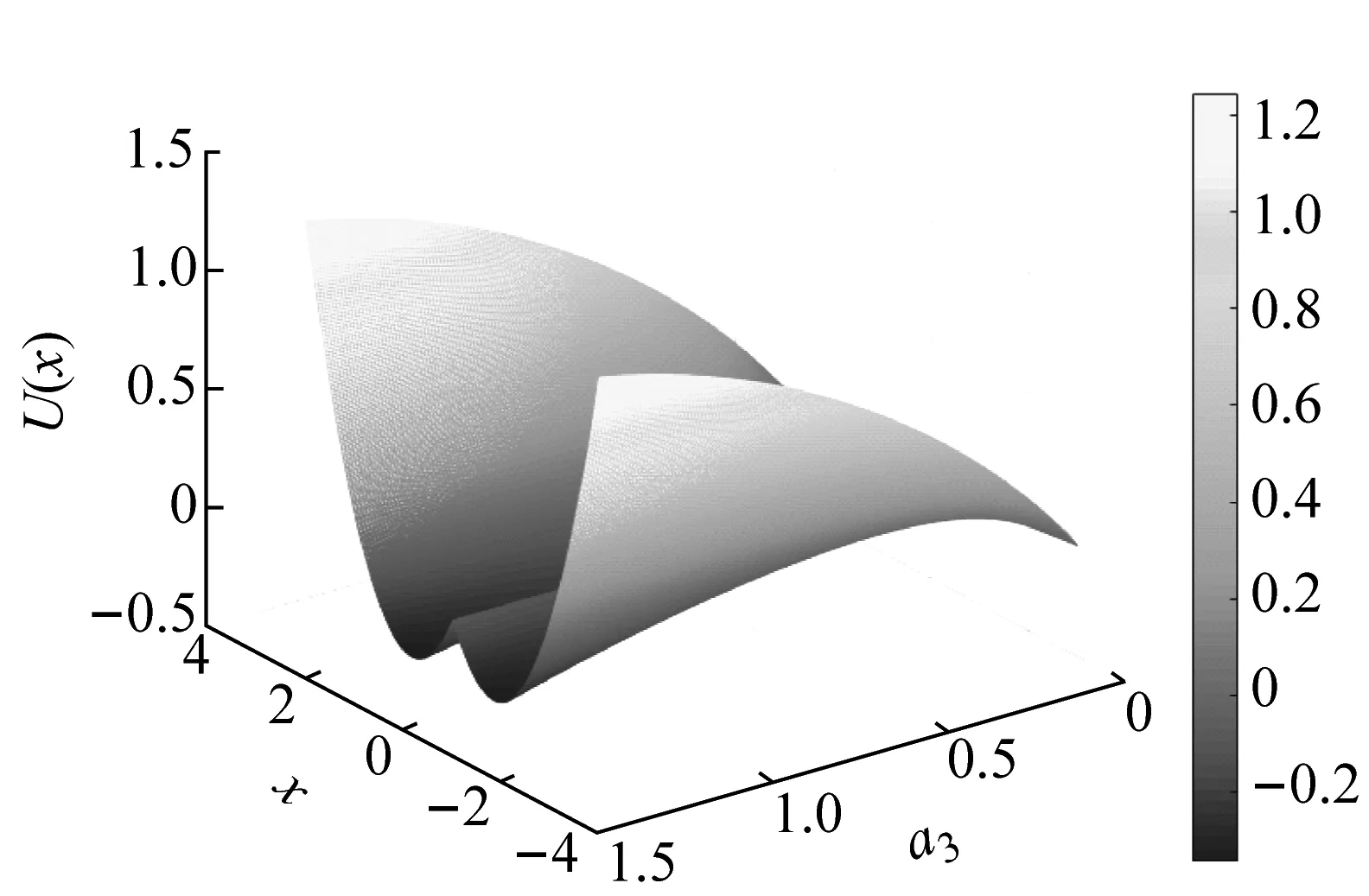
式中,v和R为GP的系统参数。GP随x和R的变化图,如图2所示。由图2可知:GP呈钉子型势函数,在某一对称范围内快速向零集中。固定其他参数不变,调节v,仅阱深改变;同理,调节R,仅阱宽改变。
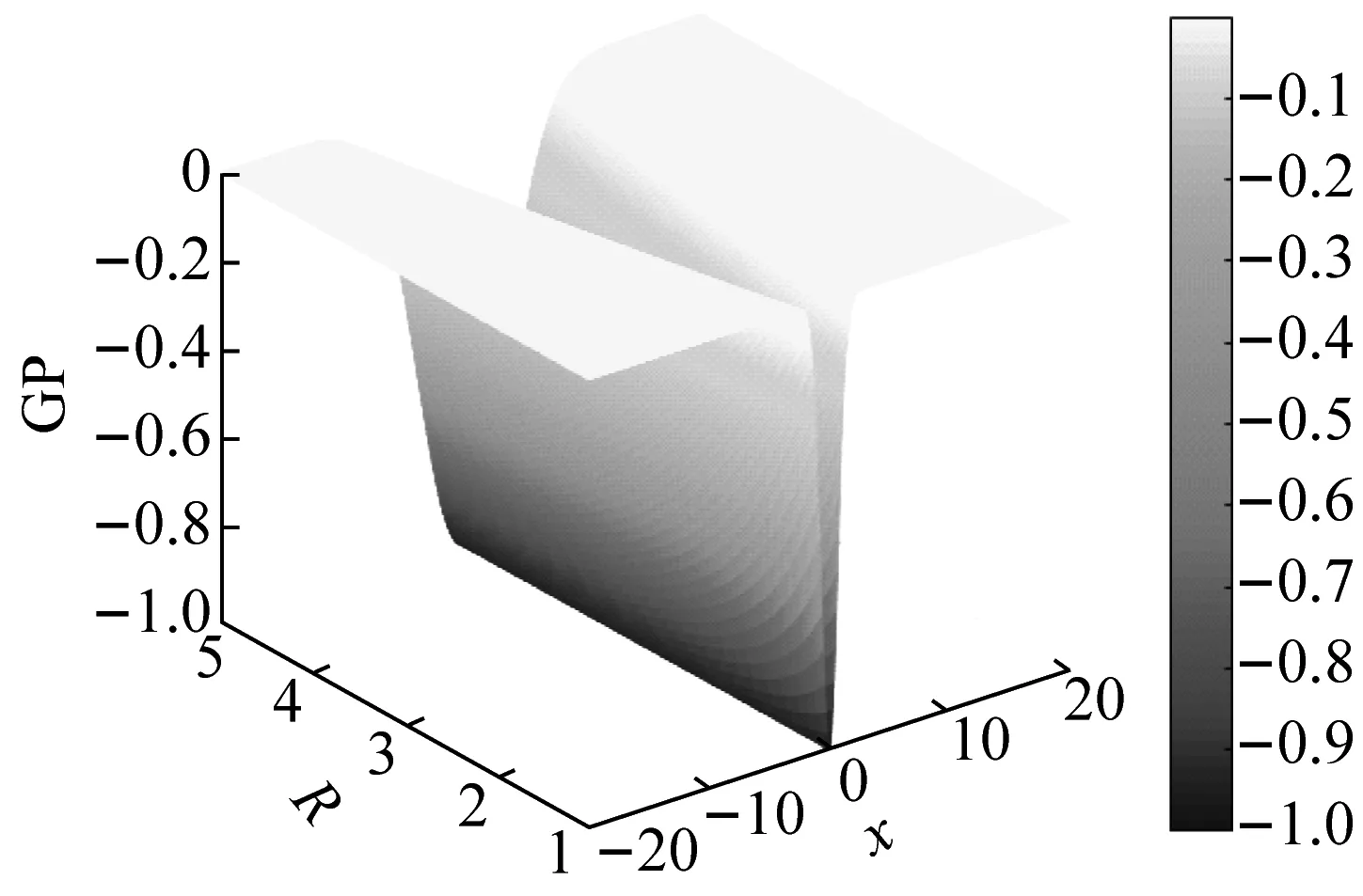
(a) GP随x和R的变化图(v=1)
2 高斯势分段双稳函数(GPPBSR)模型
2.1 郎之万方程
为提高系统性能,该文将GP和UPBSR结合,得到GPPBSR系统,且a3,b3,v,R均为正实数
U3=U2+UG
(5)
(6)
将式(6)代入式(1)得到郎之万方程如式(7)

Asin(2pf0t)+η(t)
(7)
为便于分析,将势阱力分为两部分,如式(8)所示,y1和y2交点为势函数解的个数,如图3所示。
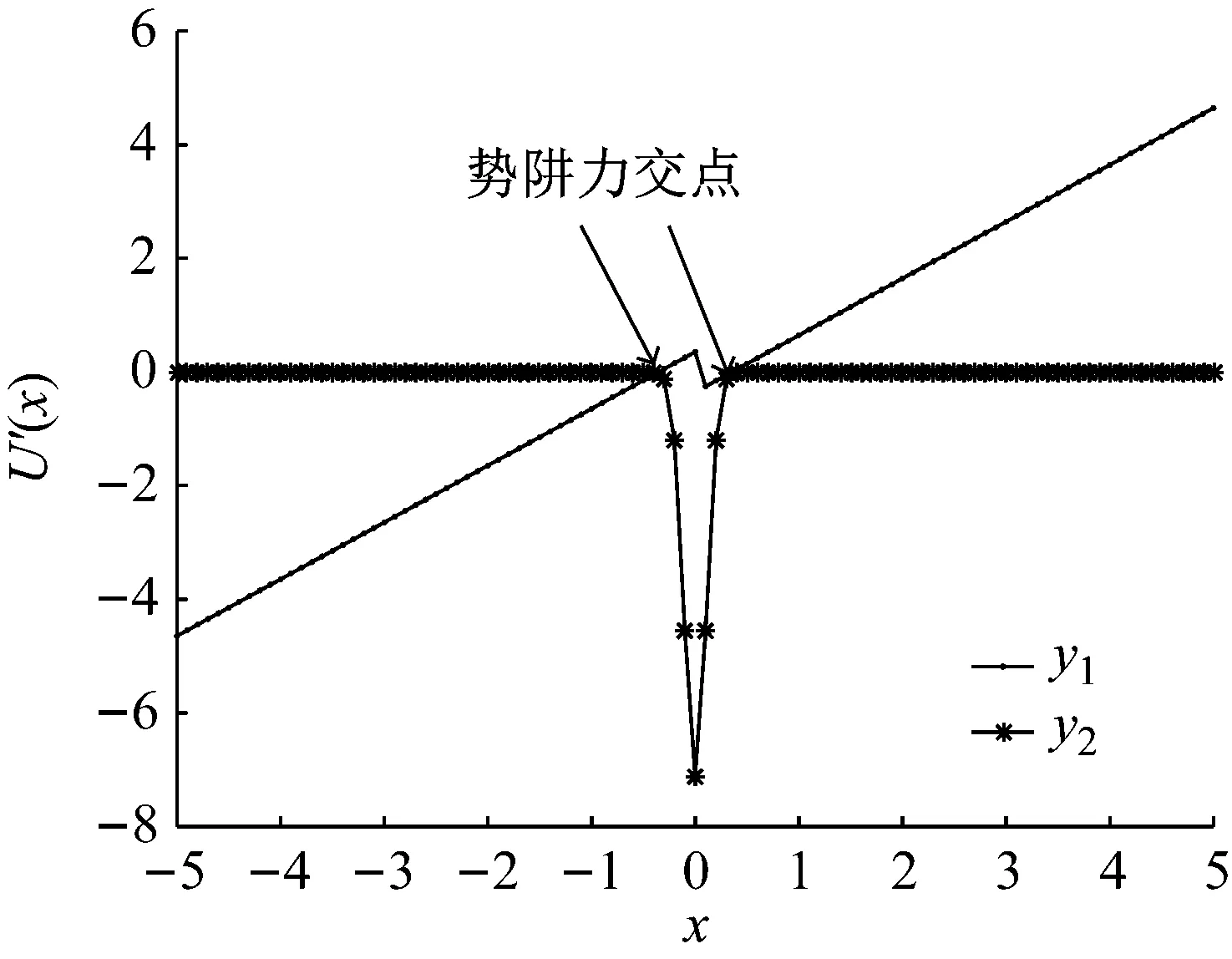
图3 方程组解的个数图
(8)
2.2 参数对组合型势函数的影响
CBSR、UPBSR、GPPBSR 3种系统势函数,如图4所示。由图4可知,GPPBSR比CBSR和UPBSR系统的阱深更浅、阱宽更宽,更有利于粒子的跃迁。参数a3,b3,v,R对势函数的影响,如图5所示。由图5可知,a3控制阱宽,b3和v控制阱深,当R≥1时,再提高R的值,对势函数整体几乎无影响。
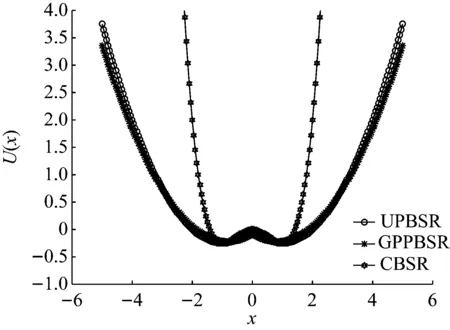
图4 CBSR、UPBSR、GPPBSR势函数图
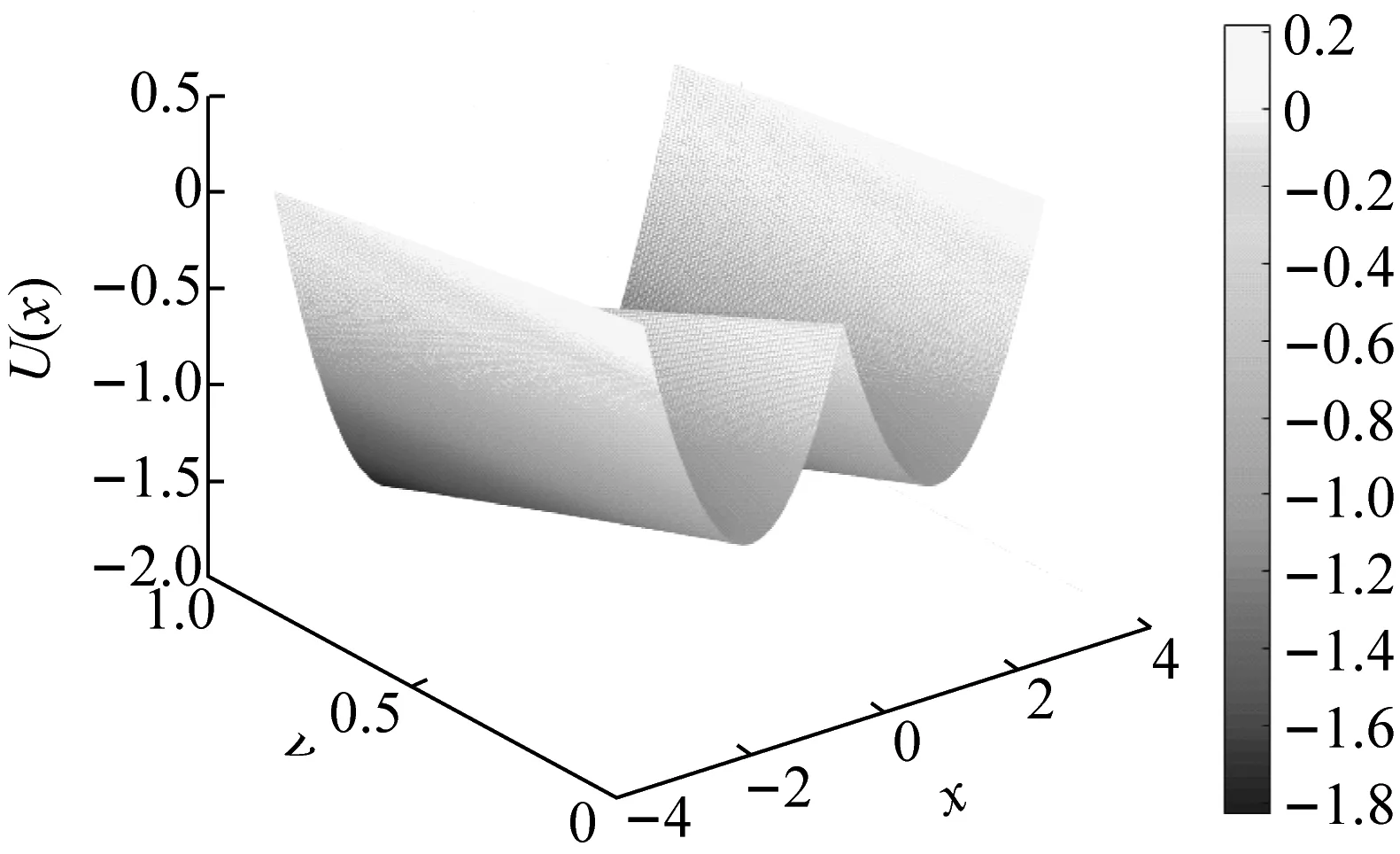
(c) U(x)随v的变化图(a3=1,b3=1,R=1)
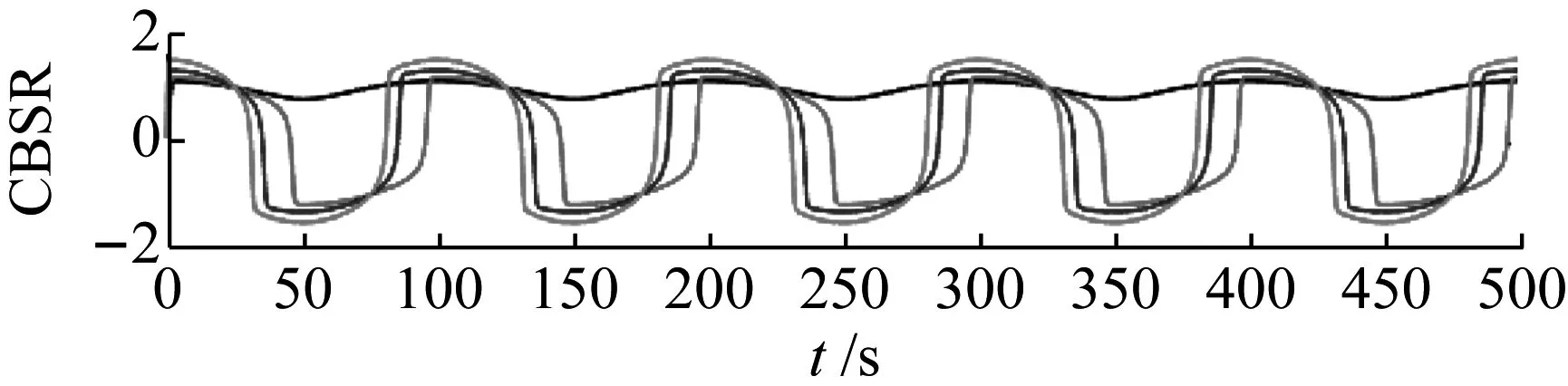
将式(6)代入式(1),设D=0,通过四阶龙格库塔法仿真,其该算法的主要步骤如式(9)所示,得到UPBSR、CPBSR、GPPBSR系统的输出信号振幅随输入信号振幅的变化曲线,如图6所示。由图6可知:3种系统的输出信号振幅均随输入信号振幅的增加而增大,但CBSR系统的输出幅度增加更小;当Ain<0.4时,UPBSR增加速度极快,之后等比例增加;且GPPBSR的增加速度比UPBSR更明显,结果表明GPPBSR比CBSR和UPBSR的输出性能好。
(9)
设f0=0.01,N=10 000,D=0,A=0.3,0.5,1.0,2.0。可得到3个系统之间饱和性对比图,如图7所示。显然,在相同条件下,GPPBSR可以克服CBSR输出饱和的缺点,且能够增强信号能量。
设f0=0.01,N=10 000,D=0,A=0.3,0.5,1.0,2.0。可得到3个系统之间饱和性对比图,见图6。3个系统输入输出信号振幅图,见图7。由图7可知,3个系统的输出振幅随着输入振幅的增加而增加,并且CBSR系统增加的幅度缓慢,在同一个输入幅值下,CBSR和UPBSR系统的输出幅值始终小于GPPBSR系统的输出幅值。
(a) U(x)随a3的变化图(b3=1,v=0.3,R=1)
(a) CBSR
说明在相同条件下,GPPBSR系统可以克服CBSR系统输出饱和的缺点,且能够增强信号能量。
3 高斯势分段双稳函数模型
3.1 高斯白噪声下GPPBSR系统的仿真
将SNR及MSNRI作为测度指标,分析高斯白噪声和色噪声环境下的系统抗噪性能。SNR(RSN)定义为
(10)
式中:S为信号能量;N为噪声能量。MSNRI(IMSNR)定义为式(10)
(11)
选取a3=1.2,b3=1,v=1,R=3,f0=0.01,A=1,D在0~20区间,取1×104次试验的平均值得到RSN和IMSNR随D变化,如图8所示。由图8可知,GPPBSR在强噪声条件下发生SR现象,且随D的增加,RSN和IMSNR均先增后减,最后趋于平稳。当D为2左右时,RSN和IMSNR达到最佳,且RSN=-21 dB,IMSNR=30 dB,IMSNR>0,说明GPPBSR对输入的噪声信号有一定程度的改善作用。
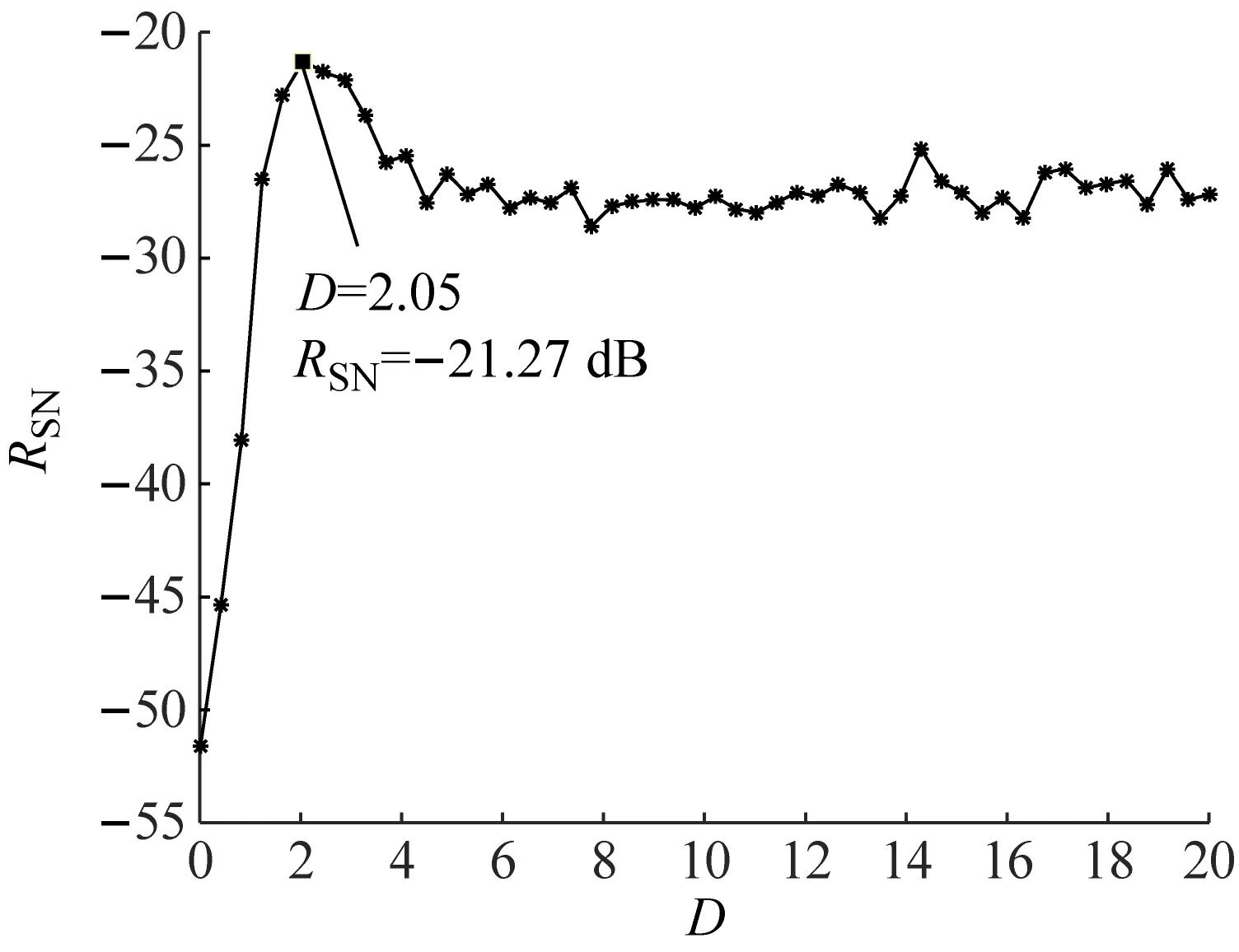
(a) RSN随D的变化图
在高斯白噪声背景下GPPBSR的IMSNR随a3,b3,v,R变化的图,如图9所示。由图9可知:IMSNR随D和a3,b3均呈先增后减的非单调变化;IMSNR随D和v,R的增大单调递减,且当v和R增加到一定值时,IMSNR几乎不再变化,此时GPPBSR系统达到输出饱和状态。说明:通过加大a3和b3或者减小v和R能使信号和噪声能量发生转移,并且达到利用噪声提高信号性能的效果。
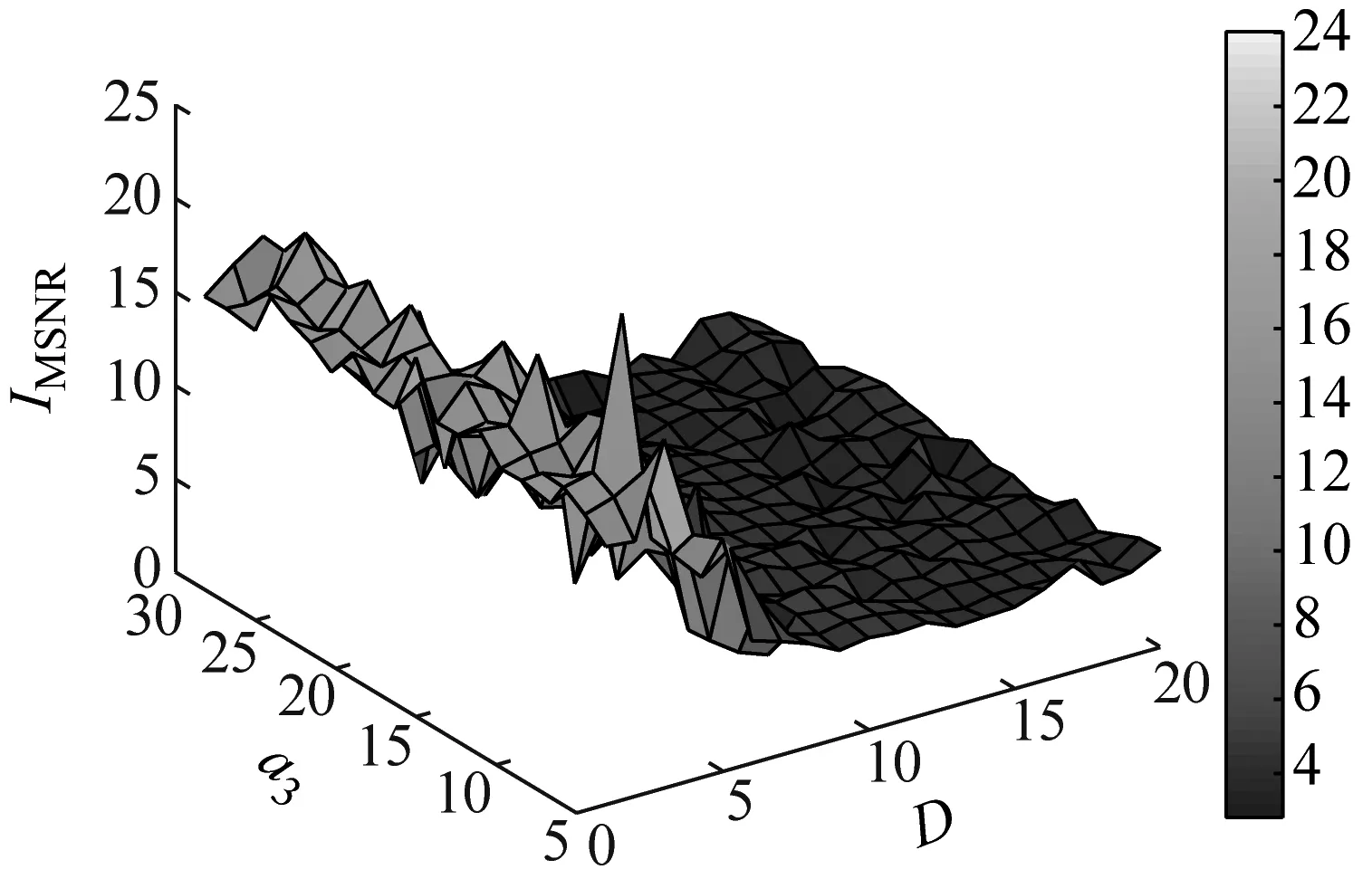
(a) IMSNR随D和a3的变化图(b3=1,v=1,R=1)
设,f0=0.01,A=1,通过遗传算法进行参数寻优得到最优参数:a3=1.201 35,b3=1.002 15,v=1.036 84,R=3.002 51。则3个系统的RSN随D的变化曲线如图10所示。由图10可知,3个系统的RSN均呈先增后减的SR现象,但GPPBSR的输出RSN的峰值更大,且峰值对应的D更强,这两者证明GPPBSR系统比CBSR和UPBSR系统的抗噪性能更好。
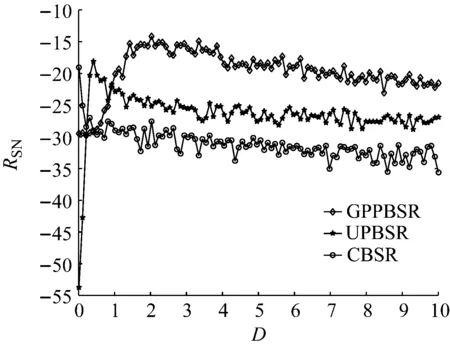
图10 不同系统的RSN对比图
为解决各参数a3,b3,v,R相互作用的问题,采用遗传算法以IMSNR作为本文的适应度函数进行参数寻优,如图11所示,具体步骤如下:
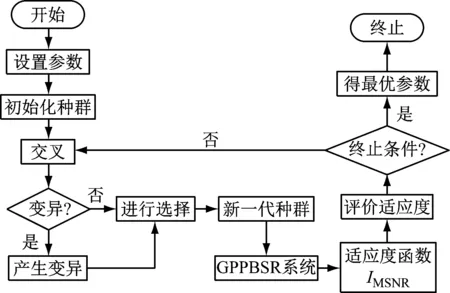
图11 遗传算法的流程图
步骤1设置参数范围。GPPBSR的参数a3,b3,v,R寻优范围分别为[0.1,2.5],[0.1,2.5],[0.1,1.5],[0.1,3.5]。
步骤2种群初始化。采用随机选择法,建立种群的规模的大小。
步骤3评价适应度。以步骤1设置的参数范围为标准,IMSNR为适应度函数进行参数寻优,并将每次得到的评价迭代到下一次寻优中。
步骤4交叉。若GPPBSR系统在交叉时发生变异则跳转到步骤5。
步骤5变异。变异算子χ′=χ+Δ(Δ≪0)。
步骤6子代的产生。随机选取子代中任何一个个体,由步骤3进行适应度评价,寻找最优解,判断其最优解是否比初始值大,若比初始值大则终止并输出,反之则执行步骤3,直到最后终止输出,得到最优参数值即可。
3.2 色噪声下GPPBSR系统的仿真
由于实际工程应用中环境噪声大多不符合高斯分布,设备采集数据时通常受到色噪声的影响,因此,色噪声背景下的故障诊断研究具有实际意义和应用前景。该节在色噪声背景下,以RSN和IMSNR为指标,结合遗传算法进行数值仿真。
通过遗传算法得到最优参数为a3=1.211 54,b3=1.015 27,v=1.011 42,R=3.103 54。GPPBSR输出IMSNR随着色噪声强度D1的变化曲线,如图12所示。IMSNR随D1整体呈先增后减,且当D1=0.44时,达到峰值13.29 dB,说明GPPBSR在色噪声下抗噪性能依旧很好。
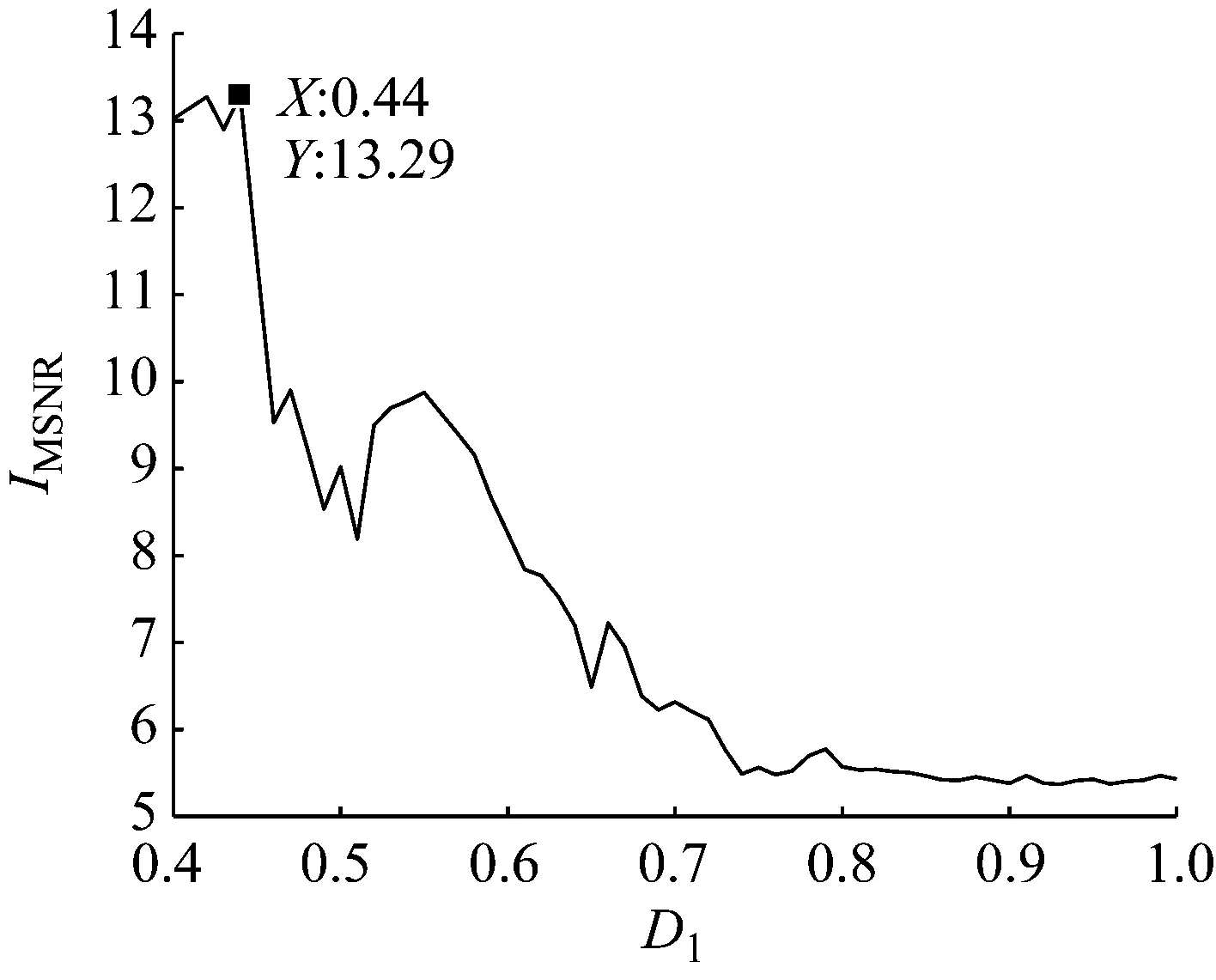
图12 IMSNR与D1的变化图
在色噪声条件下GPPBSR的输出IMSNR随a3,b3,v,R的变化图,如图13所示。由图13可知:IMSNR随参数a3,v,R的增加均呈现先增后减的SR现象;而随b3的增加呈单调递减趋势,且IMSNR均为正,说明在色噪声背景下GPPBSR系统仍具有很好的抗噪性能,IMSNR为正值,这说明GPPBSR系统对输入的噪声信号有一定程度的改善作用。
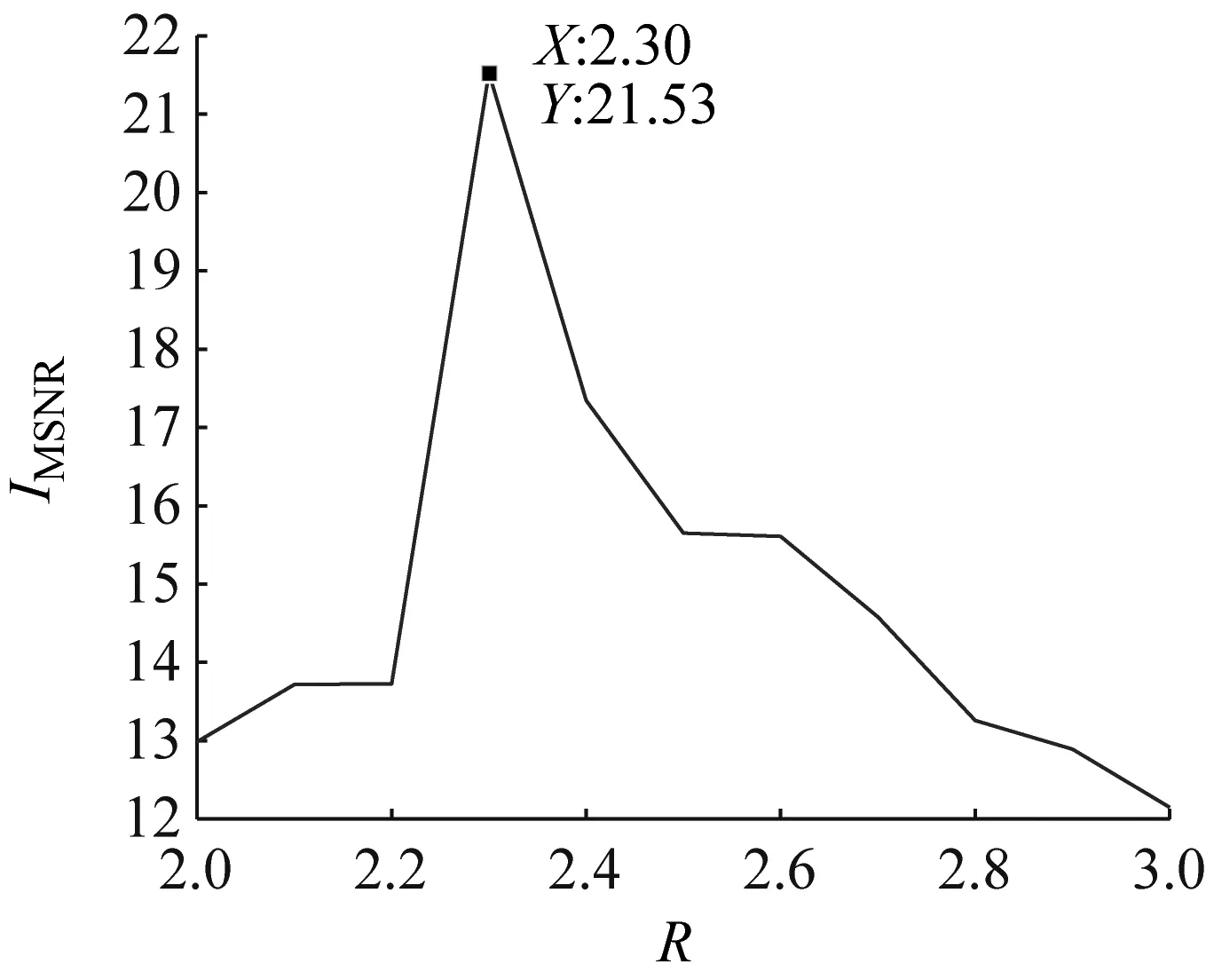
(g) IMSNR随R的变化图(a3=1.2, b3=1, v=0.1)
4 工程应用
为验证GPPBSR系统在不同场景下实际工程应用中的可行性,本文分别对UPBSR和GPPBSR两种系统的轴承故障进行了诊断并进行性能对比。
4.1 6205-2RS JEM SKF型号下的轴承故障诊断
由于实际轴承故障数据公开集较少,国内外学者广泛采用采用凯斯西储大学[25]的数据,其型号为6205-2RS JEM SKF。其内外圈的故障频率可通过式(11)计算,6205-2RS JEM SKF型号的试验台,如图14所示。
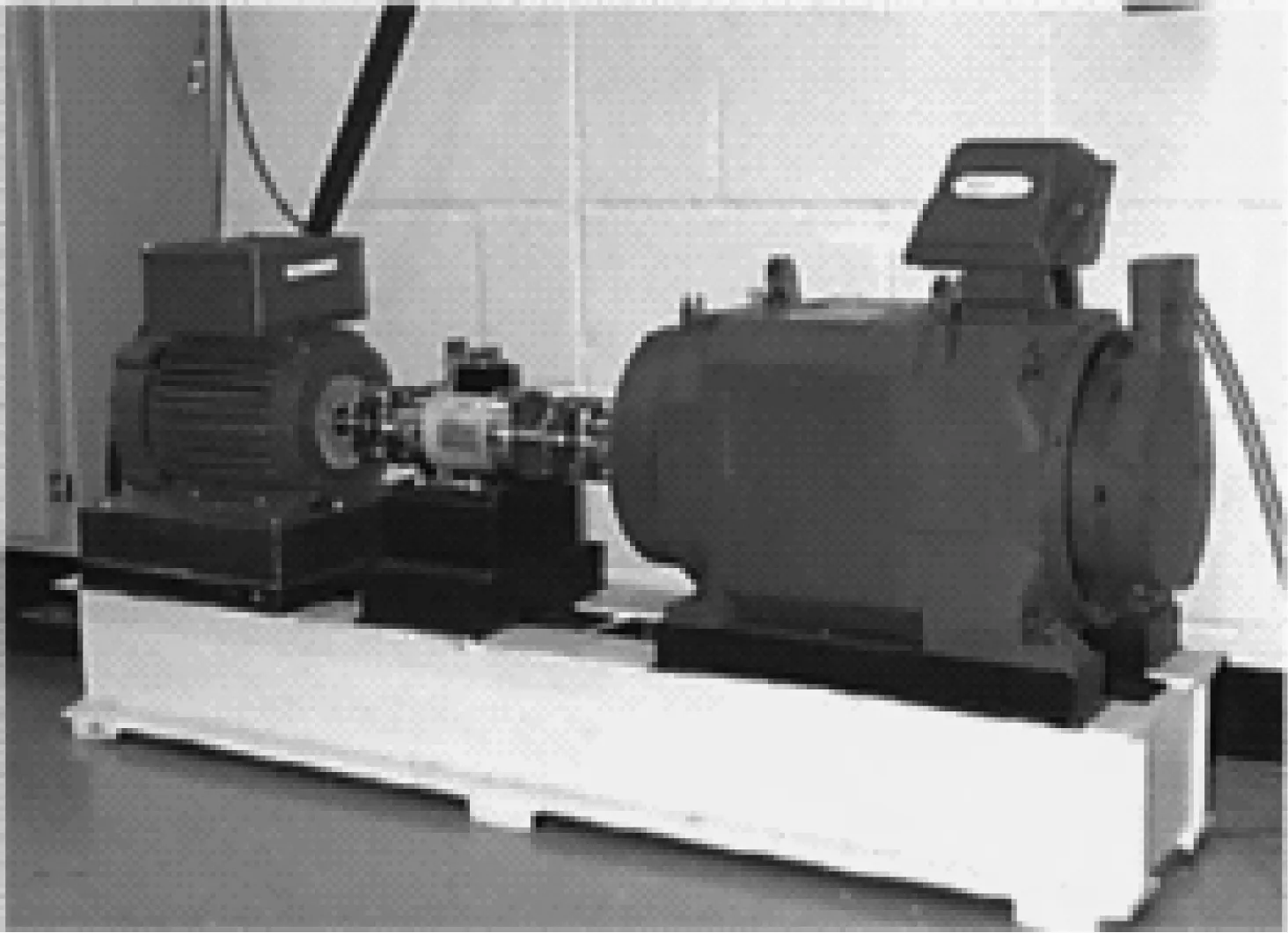
图14 6205-2RS JEM SKF型号的试验台
轴承主要参数,如表1所示。其中:轴承的转速fr=1 750 r/min,转动频率为29.166 7 Hz,缺陷尺寸为0.533 4 mm,由式(11)可得内外圈故障特征频率为:f0=107.3 Hz,f=162.2 Hz。

表1 轴承主要参数
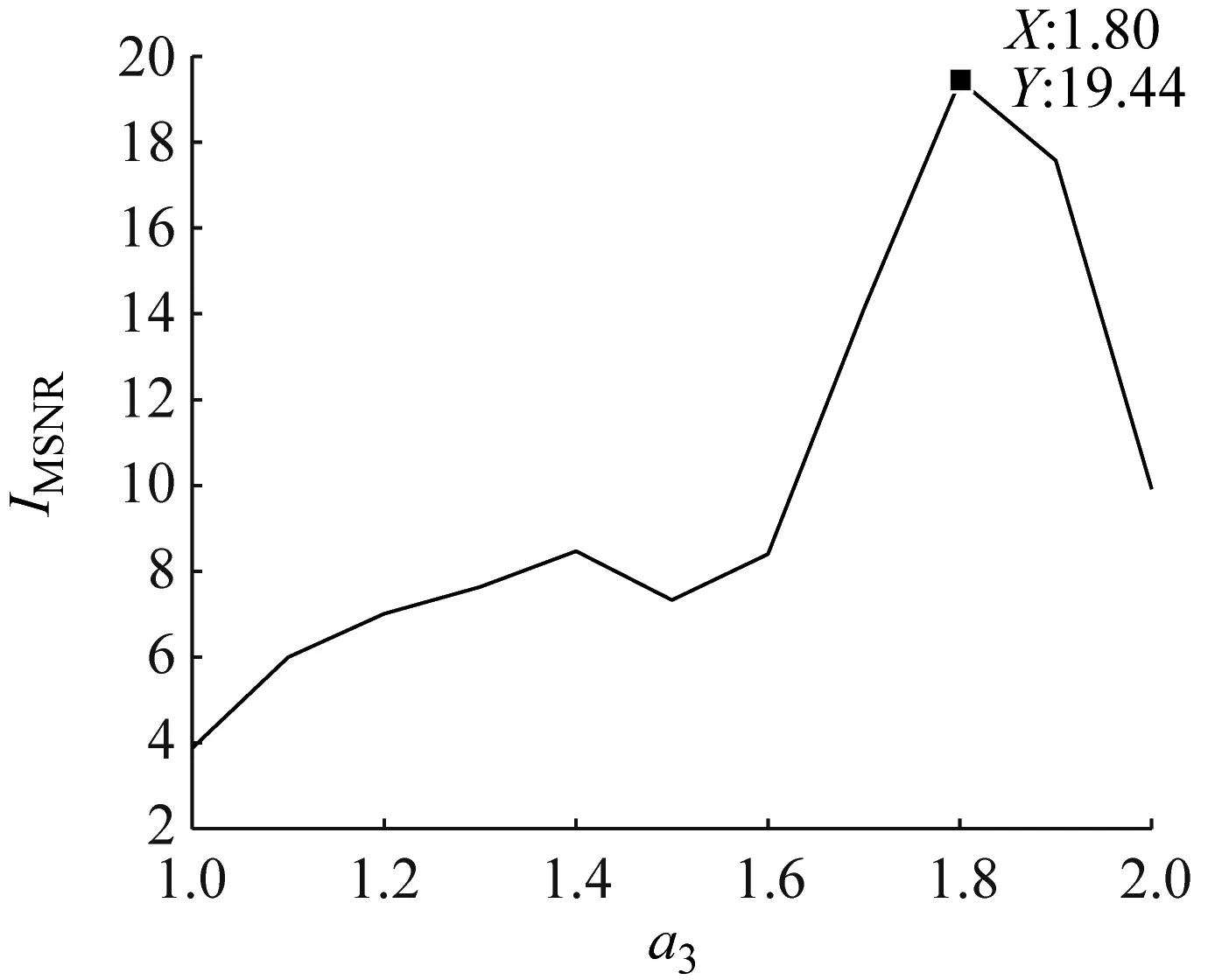
(a) IMSNR随a3的变化图(b3=1,v=0.1,R=1)
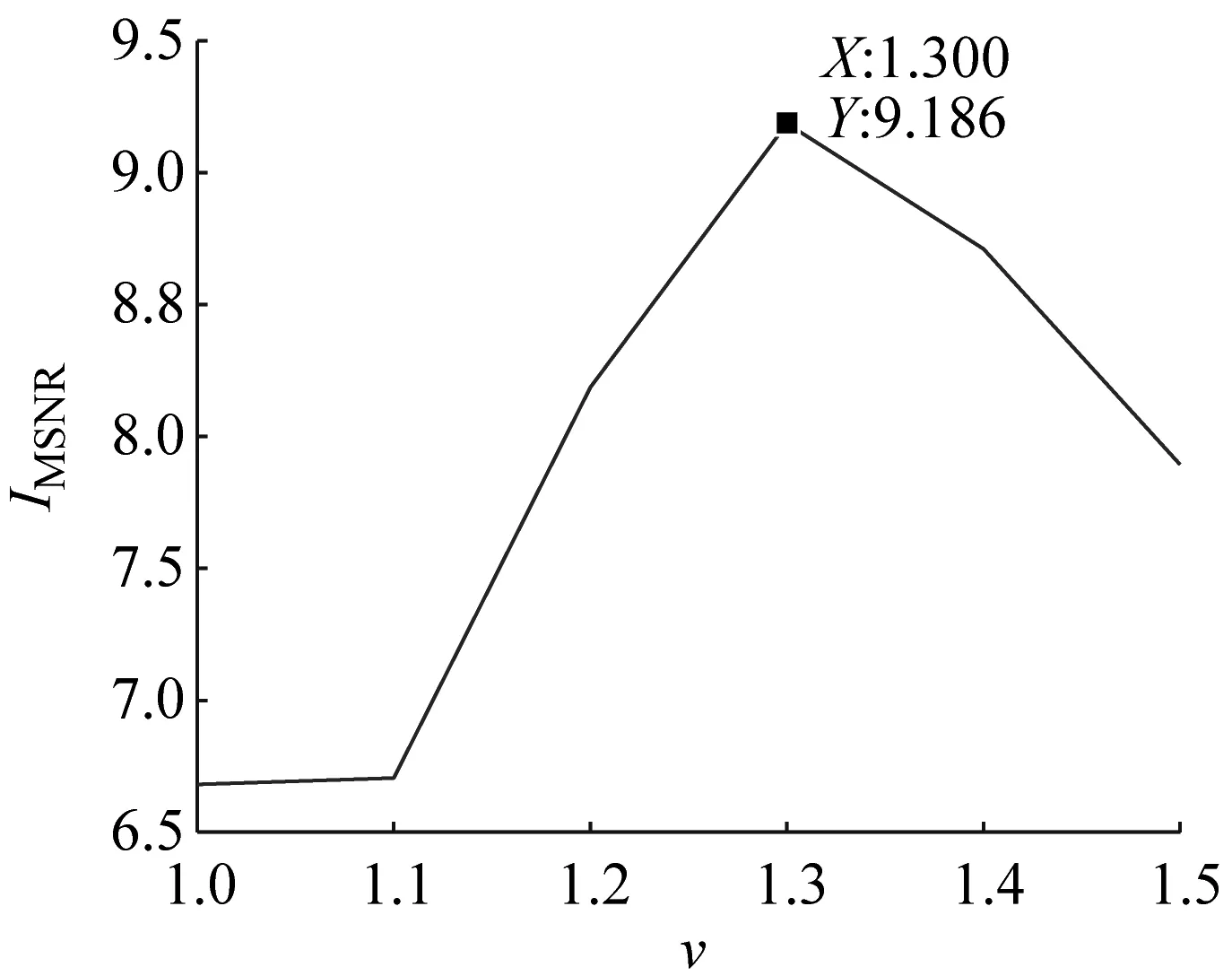
(e) IMSNR随v的变化图(a3=1.2, b3=1, R=1)
(12)
4.1.1 高斯白噪声背景下的外圈故障诊断
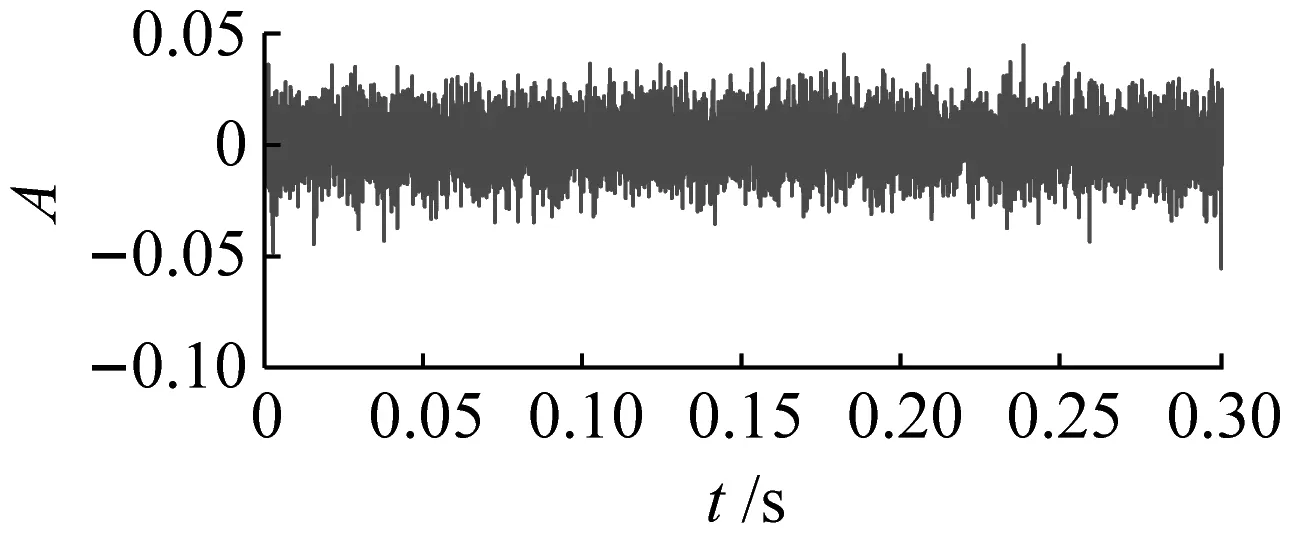
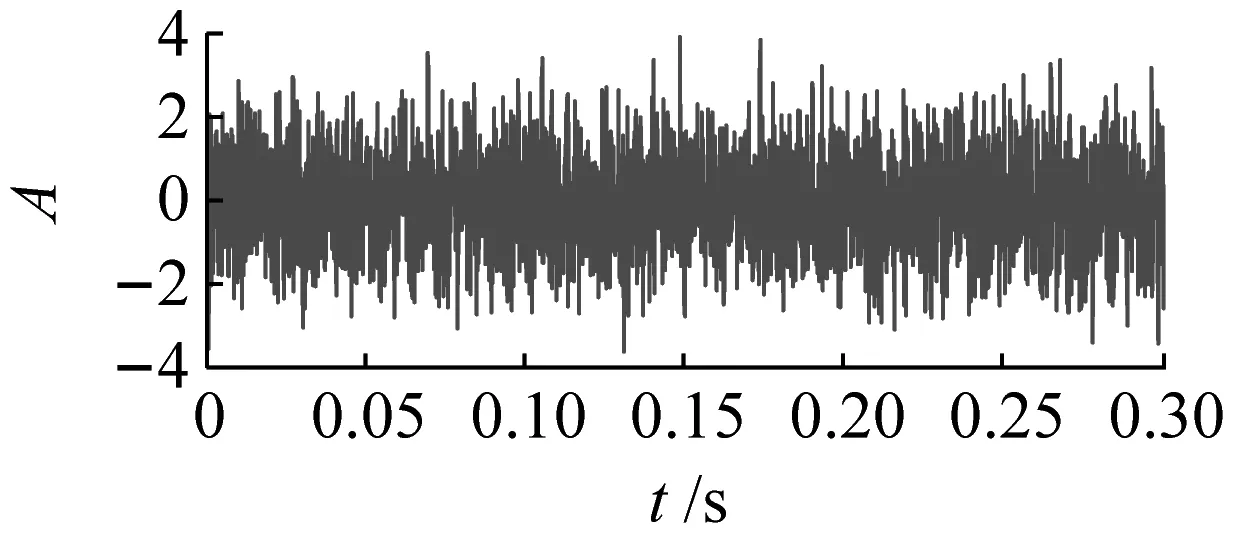
外圈故障信号时域和频谱图,如图15(a)、图15(b)所示。由图15(a)、图15(b)可知,信号完全被淹没在噪声中,故障信息不能被识别。首先,研究在高斯白噪声背景下的轴承故障诊断。由于特征频率不满足小参数条件,先对包络信号进行二次采样处理,设置采样频率fs=12 000 Hz,二次采样频率为fsr=5 Hz,N=10 000次,时间步长为h=1/fsr,利用GA(genetic algorithms)进行参数寻优,GPPBSR和UPBSR系统在高斯白噪声背景下的最优参数分别为:a3=0.5,b3=1,v=0.1,R=3和a2=1.265,b2=3.006 3,c2=0.996 5。
经过UPBSR系统输出信号的时频图,如图15(c)、图15(d)所示。由图15(c)和图15(d)可知,输出信号的幅值被放大,频谱在f=108 Hz(相对误差为0.65%)处出现了尖峰,周围干扰频率减少,此时RSN=-46.894 8 dB;经过GPPBSR系统输出信号的时频图,如图15(e)、图15(f)所示。GPPBSR系统的信号放大的程度大于UPBSR,并且频域图中的故障频率处的幅值约是UPBSR系统的3倍,故障频率周围的干扰几乎消除,证明外圈存在故障,此时RSN=-35.162 5 dB仿真结果表明:GPPBSR系统能够检测出微弱故障信号,性能优于UPBSR系统。
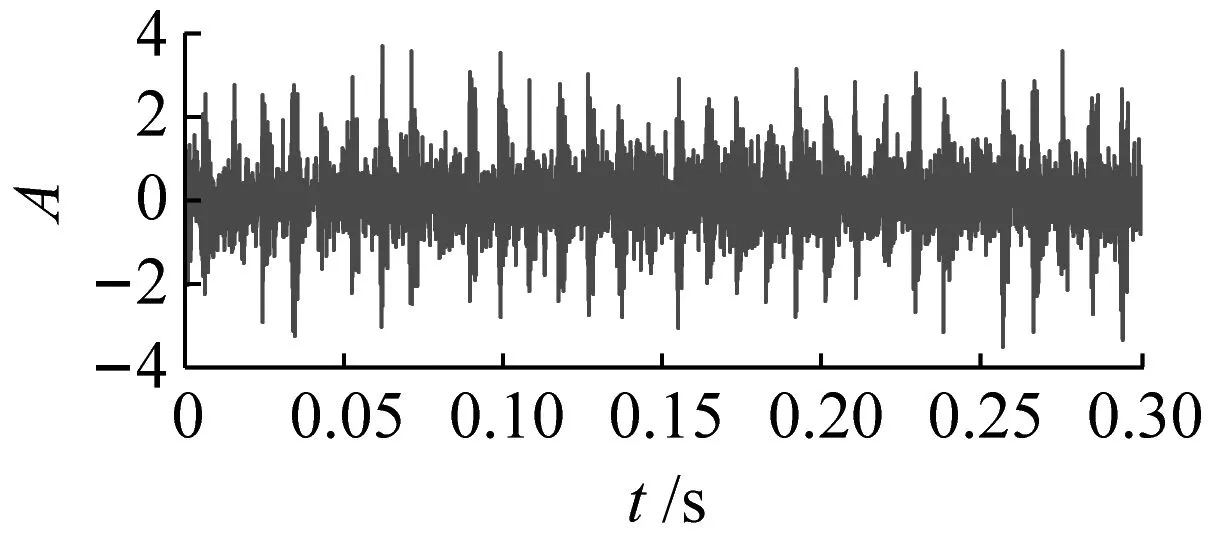
(a) 故障信号的时域图
4.1.2 高斯白噪声背景下的内圈故障诊断
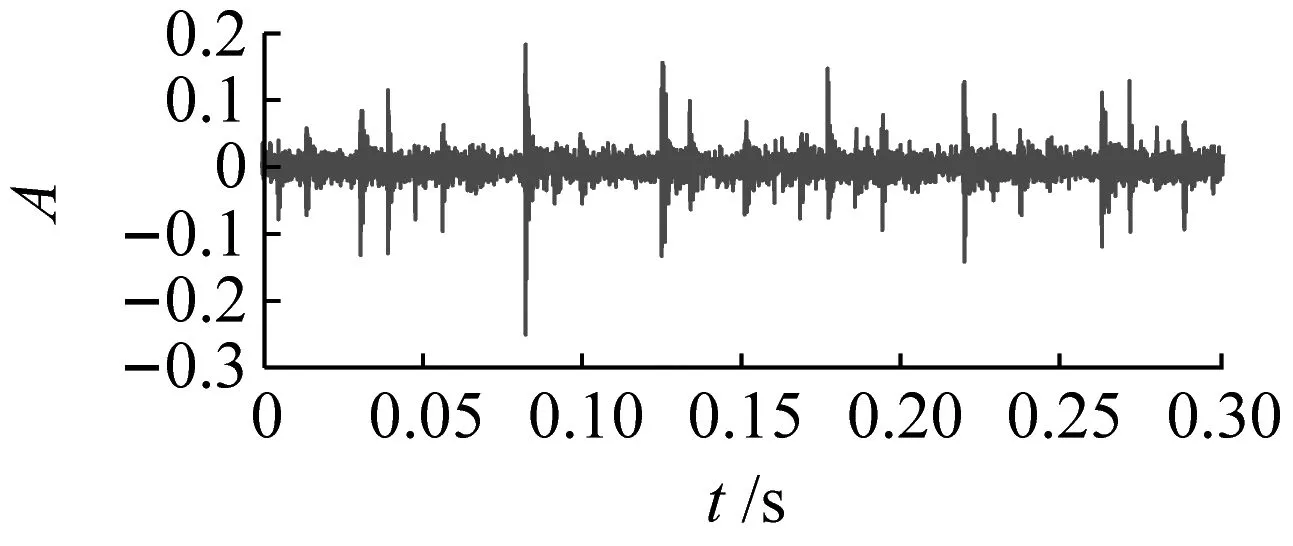
内圈故障信号的时频图,如图16(a)、图16(b)所示。由图16(a)、图16(b)可知,频谱中存在大量噪声成分,且无法识别故障信息。通过GA对故障信号进行参数寻优,GPPBSR和UPBSR系统在高斯白噪声背景下的最优参数分别为:a3=0.658,b3=1.024,v=0.122 5,R=2.958和a2=1.112,b2=2.964,c2=1.367。图16(c)、图15(d)和图16(d)、图15(f)分别为UPBSR和GPPBSR系统输出信号的时频域图,由图可知,GPPBSR系统输出信号幅度被放大,并且UPBSR和GPPBSR系统在f=162 Hz(相对误差0.123%)频率处均出现尖峰,GPPBSR系统的输出信号的频域图的幅值更大,更易确定内圈存在故障。从RSN来看,UPBSR系统为-9.266 5 dB,GPPBSR系统为-8.984 0 dB,表明GPPBSR系统的抗噪性能和检测性能更优越。
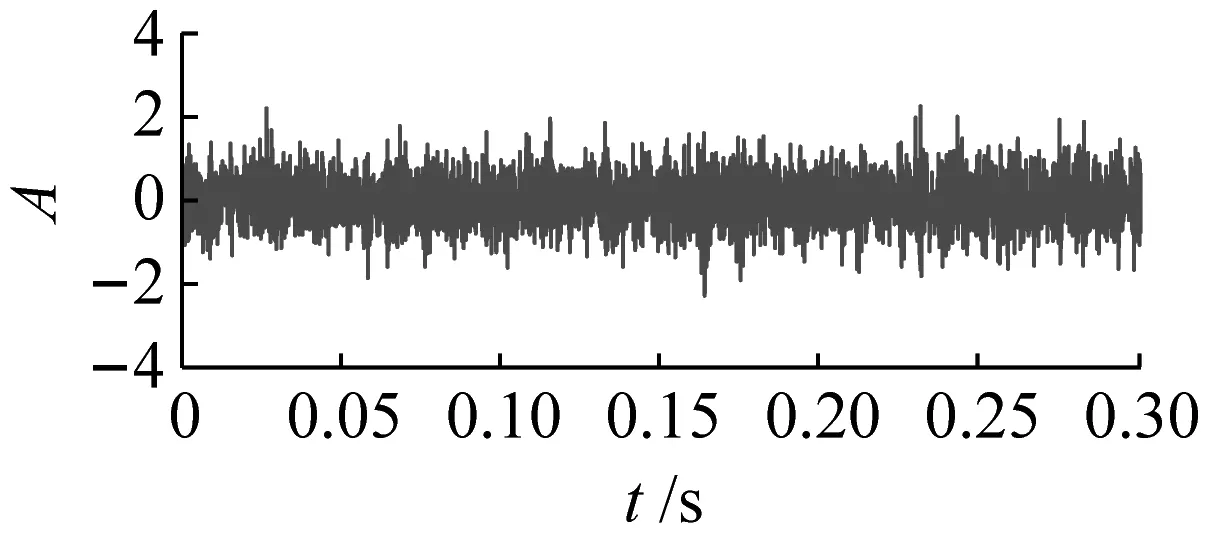
(a) 故障信号的时域图
4.1.3 色噪声背景下的外圈故障诊断
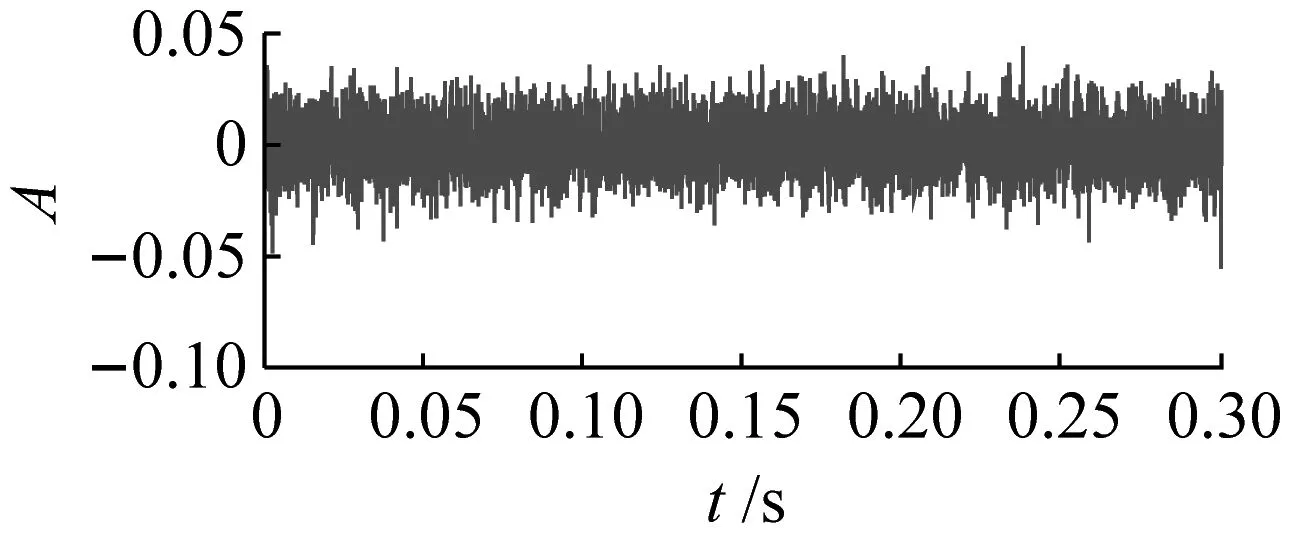
在色噪声背景下外圈故障信号时频域图,如图17(a)、图17(b)所示。由图17(a)、图17(b)可知,信号完全被淹没在噪声中,故障信息不能被识别。由于特征频率不满足小参数条件,先对包络信号进行二次采样处理,设置fs=12 000 Hz,fsr=5 Hz,N=10 000次,利用GA进行参数寻优,GPPBSR和UPBSR系统在高斯白噪声背景下的最优参数分别为:a3=0.496,b3=0.893,v=0.325,R=3.332和a2=1.001,b2=3.036,c2=0.895。
经过UPBSR系统输出信号的时频图,如图17(c)、图17(d)所示。由图17(c)、图17(d)可知,输出信号的幅值被放大,频谱在f=108 Hz(相对误差为0.65%)处出现了尖峰,周围干扰频率相对减少,此时RSN=-27.036 6 dB。经过GPPBSR系统输出信号的时频图,如图17(e)、图17(f)所示。该系统信号放大程度大于UPBSR系统,并且频域图中的故障频率处的幅值约是UPBSR系统的4倍,故障频率周围干扰几乎消除,说明外圈存在故障,此时RSN=-23.070 4 dB。仿真结果表明:GPPBSR系统能够检测出微弱故障信号,抗噪性能和检测性能均优于UPBSR系统。
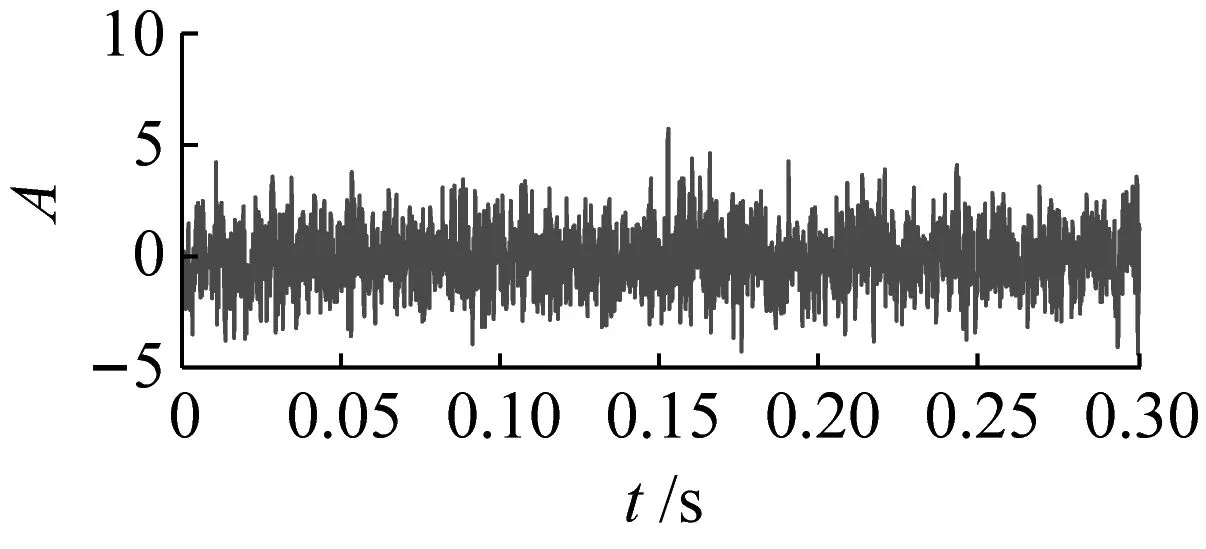
(a) 故障信号的时域图
4.1.4 色噪声背景下的内圈故障诊断
色噪声背景下的内圈故障信号时频图,如图18(a)、图18(b)所示。由图18(a)、图18(b)可知,频谱中存在大量噪声成分,且无法识别故障信息。通过GA对故障信号进行参数寻优,GPPBSR和UPBSR系统最优参数分别为:a3=0.856,b3=1.115,v=0.225,R=3.210和a2=1.113,b2=2.853,c2=1.224。UPBSR和GPPBSR系统输出信号的时频图,分别如图18(c)、图18(d)和图18(e)、图18(f)所示。由图18(c)、图18(d)和图18(e)、图18(f)可知,GPPBSR系统输出信号幅度被放大,并且UPBSR和GPPBSR系统在f=162 Hz(相对误差0.123%)频率处均出现尖峰,GPPBSR系统的输出信号的频域图的尖峰值更大,更易确定内圈存在故障,此时,UPBSR系统的RSN=-25.962 2 dB,GPPBSR系统的RSN=-24.178 0 dB,表明GPPBSR系统的性能更优越。
(a) 故障信号的时域图
4.2 HRB 6205-2Z型号下的轴承故障诊断
为验证GPPBSR系统在不同场景下的有效性,选择另一故障数据型号为HRB 6205-2Z进行试验,轴承结构参数[26]如表2所示,对应型号的试验台如图19所示。
图19 HRB 6205-2Z型号的试验台

表2 HRB 6205-2Z的结构参数
其中,采样频率为20 kHz,轴承转速为1 300r/min。由式(11)计算得轴承内圈频率和外圈频率分别为117.14 Hz和78.13 Hz。
4.2.1 高斯白噪声背景下的外圈故障诊断
外圈故障信号时频图,如图20(a)、图20(b)所示。由图20(a)、图20(b)可知,信号完全被淹没在噪声中,故障信息不能被识别。通过GA进行参数寻优,GPPBSR和UPBSR系统在高斯白噪声背景下的最优参数分别为:a3=0.662,b3=1.185,v=0.236,R=2.842和a2=1.423,b2=3,c2=0.953。经过UPBSR系统输出信号的时频图,如图20(c)、图20(d)所示。由图20(c)、图20(d)可知,输出信号的幅值被放大,频谱在f=78 Hz(相对误差为0.167%)处出现了尖峰,周围干扰频率减少,此时RSN=-22.607 4 dB。经过GPPBSR系统输出信号的时频图,如图20(e)、图20(f)所示。GPPBSR系统的信号放大的程度大于UPBSR系统,且频域图中的故障频率处的幅值约是UPBSR系统的4倍,故障频率周围的干扰减少,此时RSN=-19.303 0 dB,仿真结果表明:GPPBSR系统能够检测出微弱故障信号,性能优于UPBSR系统。
(a) 故障信号的时域图
4.2.2 高斯白噪声背景下的内圈故障诊断
内圈故障信号的时频图,如图21(a)、图21(b)所示,频谱中存在大量噪声成分,且无法识别故障信息。通过GA进行参数寻优,GPPBSR和UPBSR系统的最优参数分别为:a3=0.658,b3=1.007,v=0.116,R=2.821和a2=1.102,b2=2.860,c2=1.227。UPBSR和GPPBSR系统输出信号的时频图,分别如图21(c)、21(d)和图21(e)、21(f)所示。由图可知,GPPBSR系统输出信号幅度被放大,并且UPBSR和GPPBSR系统在f=116 Hz(相对误差0.973%)频率处均出现尖峰,GPPBSR系统的输出信号的频域图的尖峰值更大,更易确定内圈存在故障。从RSN来看,UPBSR系统为-29.303 0 dB, GPPBSR系统为-24.792 1 dB,表明GPPBSR系统的抗噪性能和检测性能更优越。
(a) 故障信号的时域图
4.2.3 色噪声背景下的外圈故障诊断
在色噪声背景下外圈故障信号时频图,如图22(a)、图22(b)所示。信号完全被淹没在噪声中,故障信息不能被识别。利用GA进行参数寻优,GPPBSR和UPBSR系统最优参数分别为:a3=0.699,b3=0.999,v=0.214,R=3.102和a2=1.022,b2=3,c2=1.030。经过UPBSR系统输出信号的时频图,如图22(c)、图22(d)所示。由图22(c)、图22(d)可知:输出信号幅值被放大,且f=78 Hz(相对误差为0.167%)处出现尖峰,干扰频率减少,RSN=-23.017 9 dB;经过GPPBSR系统输出信号的时频图,如图20(e)、图20(f)所示。该系统信号放大程度大于UPBSR系统,且幅值约是UPBSR系统的2倍,故障频率周围干扰减少,此时RSN=-18.417 5 dB。仿真结果表明,GPPBSR系统能够检测出微弱故障信号,抗噪性能和检测性能优于UPBSR系统。
(a) 故障信号的时域图
4.2.4 色噪声背景下的内圈故障诊断
色噪声背景下的内圈故障信号时频图,如图23(a)、图23(b)所示。由图23(a)、图23(b)可知:频谱中存在大量噪声成分,且无法识别故障信息。通过GA对故障信号进行参数寻优,GPPBSR和UPBSR系统最优参数分别为:a3=0.856,b3=1.115,v=0.225,R=3.210和a2=1.113,b2=2.853,c2=1.224。
UPBSR和GPPBSR系统输出信号的时频图,分别如图23(c)、图23(d)和图23(e)、图23(f)所示。由图23(c)、图23(d)和图23(e)、图23(f)可知,GPPBSR系统输出信号幅度被放大,并且UPBSR和GPPBSR系统在f=118 Hz(相对误差0.734%)频率处均出现尖峰,GPPBSR系统的输出信号的频域图的尖峰值更大,更易确定内圈存在故障,此时,UPBSR系统的RSN=-36.552 1 dB, GPPBSR的RSN=-22.813 9 dB,说明GPPBSR系统的性能更优越。
(a) 故障信号的时域图
5 结 论
本文在CBSR、UPBSR系统的基础上提出GPPBSR,该势函数克服CBSR的输出RSN较低及UPBSR系统信号增强性能弱的问题。采用四阶龙格库塔法进行数值仿真,研究了不同系统在高斯白噪声和色噪声背景下的参数对RSN,IMSNR的影响。最后,将GPPBSR应用于高斯白噪声和色噪声背景下的不同型号轴承故障诊断中。得出结论:
(1) 不考虑噪声情况时,同等条件下的GPPBSR可以克服CBSR的输出RSN较低和UPBSR增强信号能力弱的缺点。
(2) 在高斯白噪声下,随D的增加,RSN先增后减,最后趋于平稳,GPPBSR的输出具有明显的SR现象。
(3) 3个系统的RSN均呈SR现象,且CBSR最大RSN=-19.01 dB,UPBSR最大RSN=-18.08 dB,GPPBSR最大RSN=-14.17 dB,即GPPBSR系统抗噪性能最好。
(4) 色噪声条件时,CBSR、UPBSR和GPPBSR输出幅值是分别是输入的88.04倍,132.44倍和387.47倍。证明GPPBSR放大信号振幅性能比CPBR和UPBSR更好。
(5) 6205-2RS JEM SKF型号下,受高斯白噪声干扰时,GPPBSR内外圈轴承故障处的幅值分别是UPBSR的2倍和3倍;受色噪声干扰时,GPPBSR内外圈轴承故障处的幅值分别是UPBSR的6倍和4倍。说明GPPBSR在两种噪声背景下均能更好地运用到轴承故障诊断中。
(6) HRB 6205-2型号下,信号受高斯白噪声干扰时,通过仿真,检测出外圈和内圈故障频率分别为116 Hz和78 Hz,与理论数据相差较小。在高斯白噪声下,GPPBSR外圈轴承故障处的幅值是UPBSR的4倍,内圈轴承故障处的幅值是UPBSR的3倍且RSN值比UPBSR系统更大;为色噪声条件时,GPPBSR的内外圈处的幅值分别是UPBSR的4倍和3倍,GPPBSR的RSN比UPBSR更大,即GPPBSR轴承故障诊断性能和抗噪性能更好。
在稳定工况下,轴承故障诊断是可行的,在变工况下轴承的故障诊断仍面临着新的挑战,这也是后期的研究工作。
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
电子制作(2017年7期)2017-06-05 09:36:13
电测与仪表(2016年15期)2016-04-12 00:30:52
电源技术(2015年5期)2015-08-22 11:18:30
电测与仪表(2015年7期)2015-04-09 11:40:10
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
舰船科学技术(2015年8期)2015-02-27 15:38:48
电测与仪表(2014年17期)2014-04-04 11:56:48
振动、测试与诊断(2014年6期)2014-03-01 01:14:47
