基于无人机遥感的矿山重建植被功能多样性研究
2023-02-18 13:14纪润清唐佳佳杨永均张绍良侯湖平常晓华
中国矿业 2023年2期
纪润清,唐佳佳,杨永均,张绍良,侯湖平,常晓华
(1.晋能控股山西科学技术研究院有限公司,山西 大同 037003;2.中国矿业大学矿山生态修复教育部工程研究中心,江苏 徐州 221116)
0 引 言
生态修复是实现煤炭矿山碳中和的重要途径之一,也是履行矿山土地复垦义务、彰显社会和环境责任的重要举措[1-2]。生态监测是开展矿区生态修复的前提,一般通过调查和分析敏感性生态指标的时空变化和差异来揭示矿山生态损伤程度、识别生态修复重点区域和评估生态修复成效[3-4]。生态监测的核心内容是生态系统的组分、结构和功能[5]。目前,矿区生态系统的组分和结构已经受到了广泛关注,矿区生态组分监测指标主要包括地形[6]、地表温度[7]、土壤含水率[8]、重金属[9]、水体[10]、植被指数[11]、生态质量指数[12]等,矿区生态结构监测指标主要包括植被类型[13]、植被覆盖度[14]、土地利用结构[15]、景观格局[16]等。但现有研究还较少关注生态系统功能及其多样性。近年来,生态恢复的最终目的是实现生态功能的恢复被普遍认可[17]。因此,生态系统功能及其多样性是今后矿区生态监测与评价的重要指标。
功能多样性是指可以影响生产、碳储存、固氮等生态系统功能的所有物种及有机物的功能特征值及其变动范围[18],是解释和预测生态系统过程和功能的重要指标,可以用于精准评估生态系统多样性保持、固碳释氧等生态系统功能[19]。传统的功能多样性监测一般是首先测量植株高度、叶面积、氮含量等植物功能性状,然后计算功能性状的丰富度、差异性、均匀度来反映功能多样性。然而,传统的地面调查成本高、耗时长、对植物分类学信息依赖程度高,且难以实现大面积的快速调查。遥感技术的发展为生态监测提供了新的技术手段,但粗分辨率的光学遥感数据,如MODIS、Landsat和Sentinel等,难以有效提取精细的植被功能性状信息[20]。
随着无人机摄影测量技术的快速发展,利用无人机机载激光雷达和高光谱传感器可以快速获取矿区高分辨率数字影像和点云数据,从而为精细化的生态监测提供了新的契机[21]。笔者以半干旱区某露天煤矿排土场为试验研究区域,采用无人机摄影测量系统获取地面数据,提取植物群落形态和生理参数,反演功能多样性,揭示修复模式对植物群落性状及功能多样性的影响,为矿区生态监测与评价提供科技支撑。
1 数据采集与预处理
1.1 研究区概况
研究区位于西北某煤矿排土场,矿区气候属于半干旱的中温带大陆性气候,矿区土壤主要是黄绵土和风沙土,自然地带性植被为本氏针茅草原,植被稀疏低矮,覆盖度普遍低于30%。煤矿企业高度重视生态修复工程,2008年对排土场实施地貌重塑、土壤重构和植被重建,构建了乔木、乔-灌、乔-灌-草等多种类型的植被,主要的植物配置模式包括杨树、油松、沙棘、刺槐、紫穗槐、柠条+沙棘、针茅草(图1)。
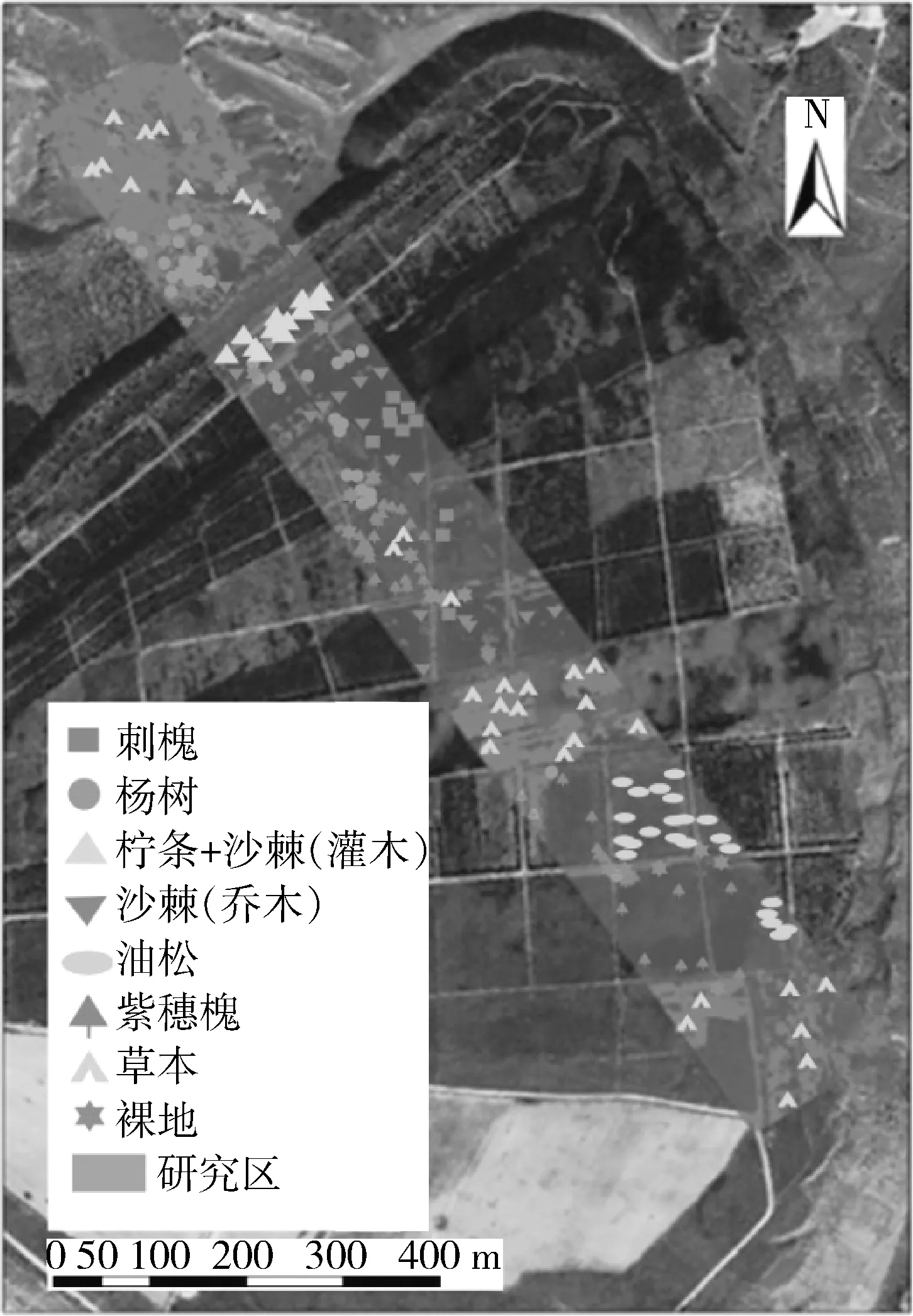
图1 研究区及样地Fig.1 Study area and sampling plot
1.2 数据采集与预处理
2020年8月3日,选取排土场中植被类型最丰富的矩形条带作为研究区,面积为20.49 hm2,矩形条带内主要有杨树、油松、沙棘、刺槐、紫穗槐、柠条+沙棘、针茅草等为优势种的植物群落。利用大疆M600无人机机载激光雷达(HS40P)和高光谱仪(S185)采集植物群落点云数据和高光谱影像。无人机飞行高度为90 m,飞行速度为5 m/s,激光雷达水平视场角为360°,垂直视场角大于20°,平均点云密度142个/m2。高光谱影像的光谱范围为450~998 nm,光谱分辨率为8 nm,光谱采样间隔为4 nm,地面分辨率0.05 m。 数据采集后,在LiDAR360软件中对激光雷达数据进行航迹解算、航带拼接、条带消冗、点云合并与去除等预处理,在ENVI5.3软件中对高光谱影像进行辐射定标、大气校正、几何校正、航带拼接及裁剪等预处理。激光雷达和高光谱影像在预处理后重采样至1 m×1 m空间分辨率。
在无人机激光雷达和高光谱影像数据采集的同时,在无人机飞行条带内随机设置10 m×10 m的样地52个(图1),记录样地角点的地理坐标,调查样方内植物物种、高度、间隙率、叶绿素、类胡萝卜素、叶片含水量,每个样地进行3次重复测定,取均值代表样地平均水平。其中,物种、高度、间隙率、叶绿素分别利用野外鉴定、测高仪、冠层分析仪、便携式叶绿素仪在现场测定。采集主要植物物种的成熟叶片放入密封袋内带回实验室,当天将植株样品称鲜重,取新鲜叶片利用分光光度法测定类胡萝卜素,另取叶片在105 ℃杀青后在80 ℃下烘干至恒重,测定叶片相对含水量[22]。
2 功能多样性测度方法
2.1 植物群落性状
功能多样性的实质是功能性状的多样性,功能性状是指与植物定植、存活、生长和死亡紧密相关的一系列核心植物属性,且这些属性能够显著影响生态系统功能[23]。最显著和易测量的性状是形态性状和生理性状[24]。矿区生态修复主要目的是构建稳定的植物群落、恢复生产力和碳固定功能,因此主要考虑与光合、生长和资源竞争相关的形态或生理性状。
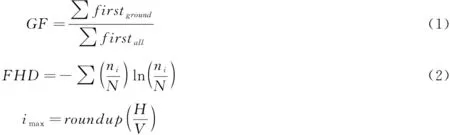
在形态性状方面,本文选取95%高度分位数(HP95)、间隙率(GF)、叶高多样性(FHD)三个指标来描述植物群落的垂直高度、水平开放度和冠层内部竞争性,计算见式(1)~式(3)。95%高度分位数是指植被到地面的垂直距离,其计算方法是将样地内所有归一化的激光雷达点云按高度进行排序,然后计算样地内95%的点所在的高度,95%高度分位数越大,植物群落能利用的垂直生长空间资源更多。间隙率是指植被首次回波的比例,比例越高表明穿透率越大,间隙率越小,植物群落对水平空间资源利用程度越高。叶高多样性是指随高度变化植物叶片的变化程度,该指标基于激光雷达首次回波,利用Shannon-Wiener多样性指数计算,叶高多样性越大,植物群落内部生态位分化程度高,对空间资源的利用效率更高。
(3)
式中:firstground和firstall分别为激光雷达首次回波地面点和所有回波点数;ni为第i层水平植被回波点数;N为植被总回波点数;H为研究植被高度最大值;V为垂直高度间隔,m;roundup为向上取整函数,即叶高多样性模型覆盖研究区植被全部高度范围。
在生理性状方面,本文选取对叶片叶绿素、类胡萝卜素、含水量来描述植物群落光能利用、初级生产及蒸腾性状。 研究表明,红边叶绿素指数(CHIred-edge)和光化学植被指数(PRI)越高,叶片叶绿素和类胡萝卜素含量越高,叶片光合作用及初级生产能力越强;植被红边胁迫指数(RVSI)越高,表明叶片受干旱胁迫,含水量越低,植物生长受到制约[25-26]。因此,选取红边叶绿素指数、光化学植被指数、植被红边胁迫指数分别指示叶片叶绿素、类胡萝卜素和含水量,计算见式(4)~式(6)。
CHIred_edge=b800/b670-1
(4)
PRI=(b570-b531)(b570+b531)
(5)
RVSI=(b714-b754)/2-b734
(6)
式中,b531、b570、b670、b714、b754、b800分别为531 nm、570 nm、670 nm、714 nm、754 nm、800 nm波段处的光谱反射率值。
2.2 功能多样性测度
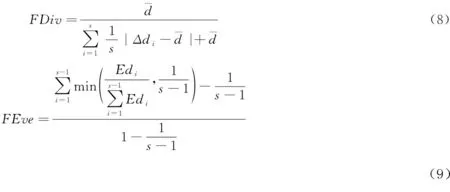
功能多样性可以分为功能丰富度、功能离散度和功能均匀度[27]。本文分别从生理多样性和形态多样性两个角度测度功能多样性。功能丰富度(FRic)是生态位范围的量度,是植物物种性状所占功能空间的外部边界,通过计算植物群落性状的凸包体积作为植被的功能丰富度,计算见式(7);功能离散度(FDiv)指功能性状样本点到重心的平均距离的分布,高值代表植被的群落间差异性大,低值表示群落间具有相似性,值为1时表示所有像素都位于一个与重心距离相等的球体上,计算见式(8);功能均匀度(FEve)描述了功能特征相对于函数空间中相似样本点之间的间距是否均匀分布,高均匀度代表功能性状规则分布,低均匀度则意味着性状在空间中出现聚集或不规则分布,功能均匀度基于最小生成树进行计算,计算见式(9)[28]。
FRic=V(lh(P))
(7)

3 功能多样性反演结果与分析
3.1 植物群落性状提取精度
在六个植物群落性状中,95%高度分位数和叶高多样性是从激光雷达点云数据中直接提取,无实测值。对于间隙率、植被含水量、叶绿素含量、类胡萝卜素含量四个性状, 采用回归分析法计算性状实测值与遥感提取值之间的相关性(图3)。在形态性状方面,间隙率估算精度较高,R2达到0.898,均方根误差为0.480。 在生理性状方面,植被含水量、叶绿素含量、类胡萝卜素含量估测的R2分别为0.629、0.648、0.641,表明植物群落内部生理性状变异性大,生理性状的遥感估测精度略低于形态性状。
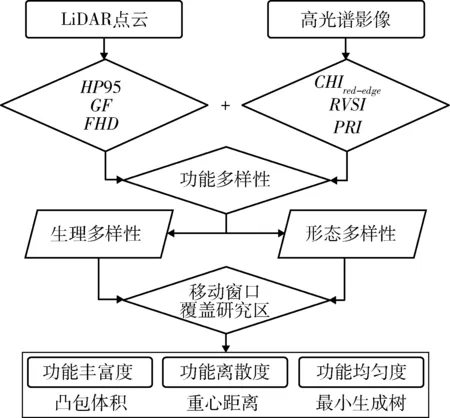
图2 基于无人机遥感的植被功能多样性测度方法Fig.2 Measurement method of vegetation functional diversity based on UAV remote sensing
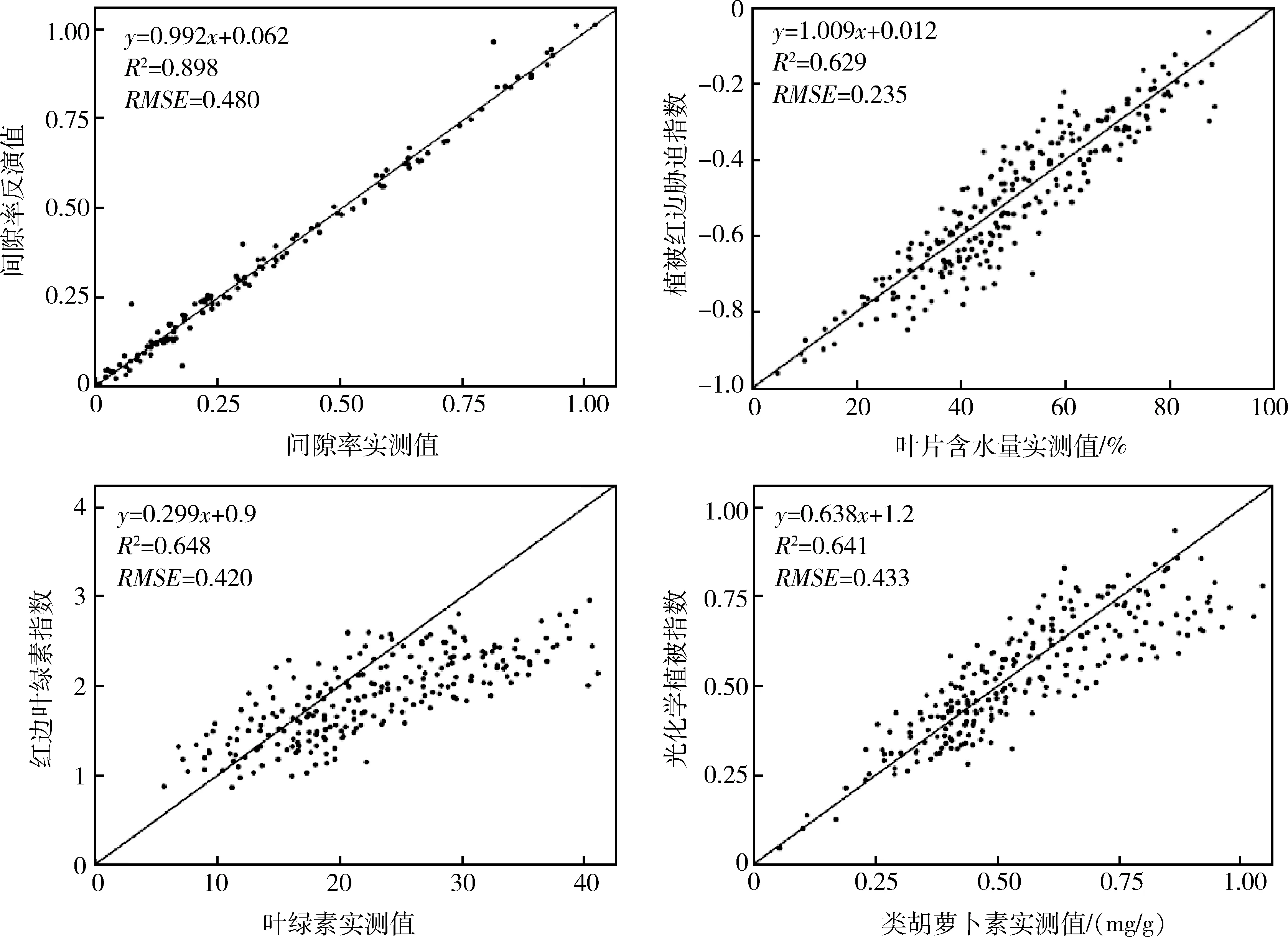
图3 植物群落性状反演精度Fig.3 Inversion accuracy of plant community traits
3.2 植物群落形态性状与生理性状
图4为研究区及典型植物群落的形态性状和生理性状的遥感反演结果。在形态性状方面,植物群落有明显的聚集性,主要有四种聚集区,一是裸地和草本,各个形态性状值低,如图4(a)中的(5)所示;二是纯沙棘、油松群落紫色区域,植物密度大、间隙率小、叶高多样性低,如图4(a)中的(1)和(7)所示;三是以杨树、紫穗槐为优势种的乔木群落,植物冠层高度高、间隙率小、叶高多样性指数大,如图4(a)中的(2)所示;四是以沙棘+柠条、刺槐为优势种的乔木群落,植物密度和叶高多样性指数都较大,如图4(a)中的(3)和(4)所示。在生理性状方面,主要有四种聚集区,一是裸地和草本,植被稀疏,叶绿素较低,类胡萝卜素和含水量较高,如图4(b)中的(5)所示;二和三是以沙棘、刺槐为优势种的群落,植物叶绿素及含水量相对较高,类胡萝卜素含量相对较低,如图4(b)中的(1)和(4)所示;四是杨树和油松纯林群落,植物含水量较低,植物叶绿素和类胡萝卜素含量均较高,如图4(b)中的(2)和(7)所示。由此可以看出,基于激光雷达和高光谱数据可以有效识别不同植物群落的形态性状与生理性状差异。
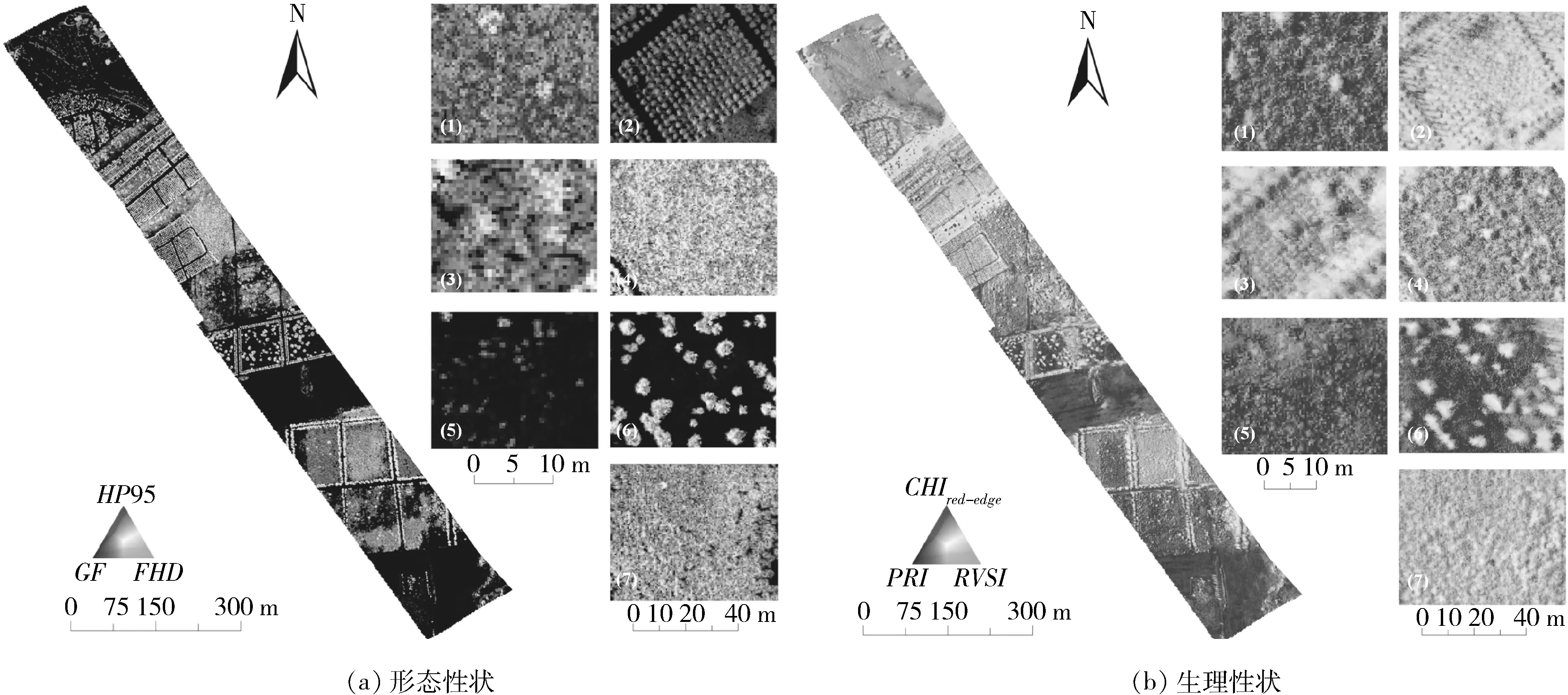
(1)-沙棘;(2)-杨树;(3)-沙棘+柠条;(4)-刺槐;(5)-草本;(6)-紫穗槐;(7)-油松图4 研究区及典型植物群落的形态性状和生理性状Fig.4 Morphological and physiological characters of the study area and typical plant communities
3.3 植物群落功能多样性
以标准化后的群落性状参数构成特征空间,按照9 m×9 m的窗口测度群落的功能多样性,结果如图5所示。从丰富度来看,研究形态和生理丰富度都较小,空间分布较均一,丰富度高值位于群落斑块的边缘地带;从离散度来看,形态离散度呈片状分布,裸地及草本群落区域形态离散度低,生理离散度受植被和裸地土壤共同影响,南侧高北侧低;从均匀度来看,形态和生理均匀度都较高,形态均匀度内部差异较大。植物群落功能多样性测度表明研究区整体多样性水平较低,形态方面的功能多样性主要受植物群落类型的控制,呈现斑块状的空间分布特征;生理方面的功能多样性受植物群落及裸露土壤条件共同影响。
统计七个不同植被重建典型群落的功能多样性,结果见表1。在形态功能多样性方面,优势种为油松、沙棘和刺槐群落形态丰富度较高,且内部标准差大,杨树群落形态丰富度较低、内部标准差大,表明杨树群落经过演替后,可以形成异质性的垂直和水平形态;草本和裸地群落的形态离散度较低,分别为0.180 8和0.273 1,且内部标准差大,其他初始优势种的形态离散度较高,且标准差较小;七个初始优势种群落内部的形态均匀度介于0.380 1~0.620 1之间,杨树群落形态均匀度的内部标准差较大。 在生理功能多样性方面,沙棘和刺槐的生理丰富度较高,分别为0.071 1和0.071 7,其他优势种生理丰富度相差较小;七个初始优势种群落内部生理离散度和生理均匀度分别介于0.656 9~0.710 5和0.606 8~0.745 5之间,不同初始优势种群落生理离散度和均匀度差异较小,但草地经过演替后,内部标准差较大。
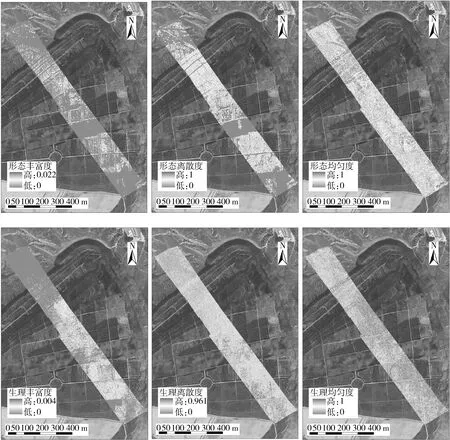
图5 研究区及典型植物群落的功能多样性Fig.5 Functional diversity of the study area and typical plant communities
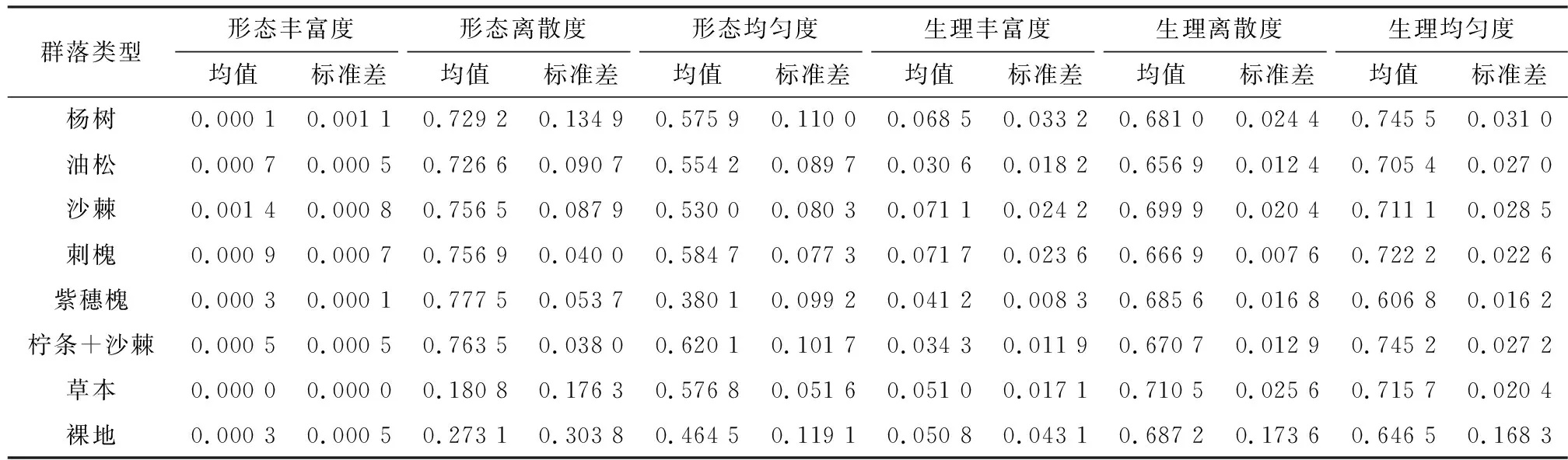
表1 不同植被重建初始优势种群落的功能多样性Table 1 Functional diversity of different initial dominant species of plant community
结合植物性状及功能多样性结果来看,初始生态修复引种植物为杨树和油松的群落经过10 a的演替后,垂直和水平形态结构丰富,但生理性状一般且较为均一;刺槐、紫穗槐、柠条+沙棘群落在演替后,形态性状和生理性状均较为丰富,但类胡萝卜素含量偏低;沙棘群落在演替后,形态性状和生理性状都较为单一,且植被红边胁迫指数高,面临较大程度的水分胁迫。草本和裸地植物稀疏,形态性状和生理性状及功能多样性水平都较低。这表明初始植被配置会对植物群落演替造成显著影响,乔灌混合的植物群落在演替后的植物性状和多样性水平相对较高,垂直结构丰富,水平开放度高,对光、热、水分资源的利用更加有效,有利于形成稳定的群落结构。因此,在生态修复时,应注意对不同高度、光合能力、水分需求的植物进行搭配,在生态修复后,可以依据植物性状及功能多样性实施间伐、补栽、修剪等群落优化措施,增强群落的自维持能力。
4 结 论
1) 无人机机载激光雷达和高光谱数据能够有效反演植物群落的形态性状和生理性状,95%高度分位数、间隙率、叶高多样性的反演精度R2大于0.9,叶绿素、类胡萝卜素、叶片含水量生理性状的反演精度R2大于0.6。基于形态性状和生理性状,可以有效地定量描述植物群落功能多样性。
2) 生态修复初期的植物配置会对演替后的植物群落功能多样性造成显著影响,乔灌混合的植物群落在演替后的植物性状和多样性水平相对较高,垂直结构丰富,水平开放度高,对光、热、水分资源的利用更加有效,有利于形成稳定的群落结构。因此,生态修复和后期管护时,可将植被功能多样性作为依据。
3) 总体来看,无人机遥感可以获取精细的植物群落结构和功能数据,提取高精度的植物性状和功能多样性信息,识别不同植物群落的形态性状与生理性状差异,从而为生态修复和成效评价提供可靠依据。无人机遥感在矿山生态监测与评价中具有广阔的应用前景。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
世界科学(2020年1期)2020-02-11
河南畜牧兽医(2020年21期)2020-01-10
中国生物医学工程学报(2019年5期)2019-07-16
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年3期)2017-11-23
Coco薇(2017年5期)2017-06-05
现代电生理学杂志(2015年4期)2015-07-18