浅谈两套起升高度限制器的合理性设置
2023-02-18 02:30:38赵西城李培峨
中国特种设备安全 2023年1期
赵西城 李培峨
(烟台市特种设备检验研究院 烟台 265508)
2021年3月国家市场监督管理总局下发了《市场监管总局办公厅关于开展起重机械隐患排查治理工作的通知》(市监特设发〔2021〕16号)文件,该通知中明确了“根据近年来特种设备事故统计和原因分析,在桥式、门式起重机使用过程中,由于高度限位装置的配置不当、缺失、损坏和失效等原因引起的事故所占比例较高”的特点,提出了桥式和门式起重机应增加“双限位”装置的要求[1]。本文对桥门式起重机加装“双限位”的结构形式和电路进行分析,针对不同形式接入的优缺点,提出更为可靠的“双限位”接入线路,从根本上彻底解决和消除由于高度限位器失效产生风险或发生事故。
1 常见的几种高度限位器形式
首先起重机械的高度位置限制器的主要形式有断火器式、重锤式、压板式、齿轮齿条式和蜗轮蜗杆传动式等这几种形式。
1.1 断火器式高度位置限制器
该种位置限制器通常使用在以电动葫芦为起升机构的轻小型起重机械中,电机功率较小,主要是通过切断电动机电源的断火器作为高度位置限制器使用。常见的起重机品种有电动单梁桥门式起重机、电动悬挂起重机、双梁葫芦桥门式起重机等。断火器的工作原理是当断火器的推杆向右移动时,断开断火器的触点3和触点4以及触点5和触点6的连接,此时断火器中的三相电源被切断其中的二相电源,正向电动机停止运行。当推杆向左推动时,断开断火器的触点1和触点2以及触点7和触点8的连接,此时断火器中的三相电源被切断其中的二相电源,反向电动机停止运行。断火器作为高度限位器的结构及工作原理如图1所示。
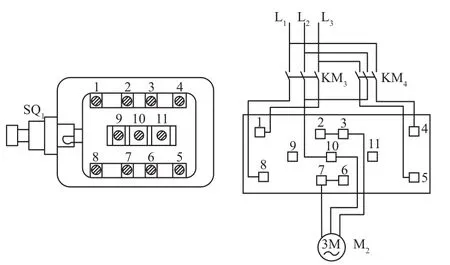
图1 断火器的结构及接线
在桥门式起重机中其工作原理是通过电动葫芦的导绳器向右移动时通过推动推杆SQ1并控制断火器,使断火器中接入上升电路中的常闭触点断开,使得电动机停止向上运转,起到上升位置限制作用的安全保护装置。当按下上升按钮S1时,KM3线圈得电,KM3常开触点闭合,电动机得电向上运行,当导绳器推动推杆运行至断火器SQ1的常闭触点断开时,切断电动机的L1和L2动力电源,电动机M2实现停止转动[2]。断火式位置限制器电路接线如图2所示。
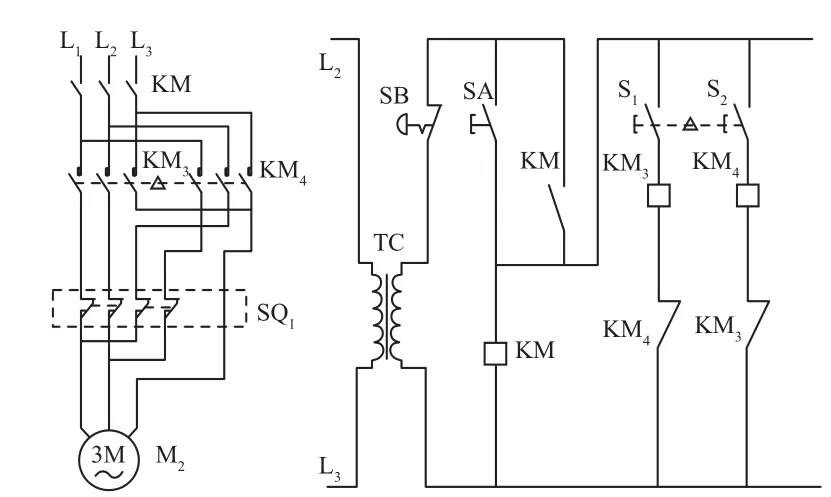
图2 断火式位置限制器电路接线图
1.2 重锤式高度位置限制器
常见于中、重型桥式和门式起重机上,也有部分无导绳器的电动葫芦起重机及其他起重机采用这种形式的高度限位装置。其结构是在重锤的另一端挂一个由吊钩滑轮组可碰触的挡块装置,在正常工作状态时,挡块依靠自身的重力拉动限位开关,使限位开关的常开触点闭合。在非正常工作时,挡块失去重力时,限位开关在另一侧重力和弹簧的作用下,使触点断开。在接入电路时,常闭触点的限位开关串接在起升电路中,用于控制起升接触器的电磁线圈。当滑轮组碰触到挡块装置时,限位开关在自身重力和弹簧作用下断开触点,切断起升回路的接触器线圈,电机停止上升。如图3所示,在电机向上运行时,由K1和主令控制器的触点接通上升回路,电机上行,当运行至高度位置限制处,在重力和弹簧作用下常闭触点K1断开时,上升接触器线圈ZC失电,电机断电停止运行[3]。
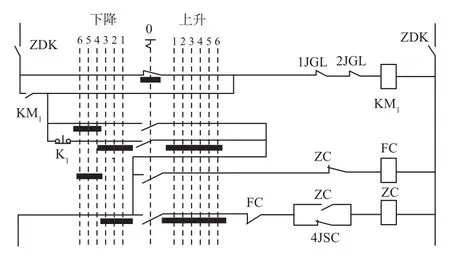
图3 重锤式位置限制器电路接线图
1.3 压板式高度位置限制器
可用于葫芦桥、门式起重机上,也可应用于通用桥、门式起重机上,国内生产的起重机械上使用的较少,国外部分起重机采用该种结构,如韩国生产的星都电动葫芦和半岛电动葫芦。其工作原理与国内的重锤式相似,但其控制电路与常见的控制接线方式不同。其实物结构如图4和图5所示。
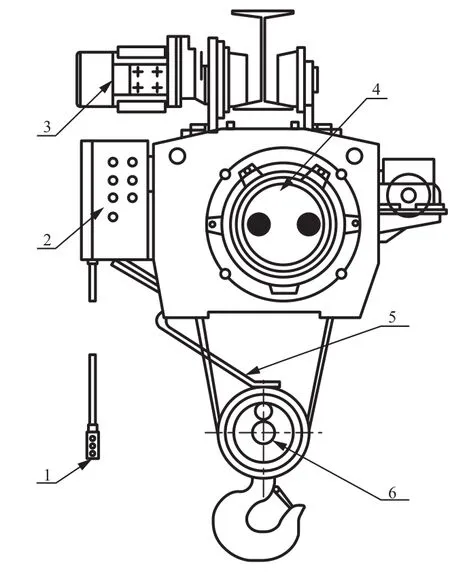
图4 韩国产星都葫芦压板式位置限制器结构图
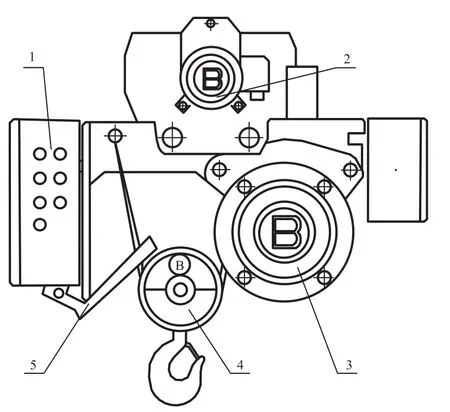
图5 韩国产半岛葫芦压板式位置限制器结构图
1.4 齿轮或蜗轮蜗杆传动式高度位置限制器
该种形式的高度限位一般常见于大于20 t及以上的起重机械中,由于其工作可靠性较高,本次专项整治不包括该种形式的起重机械。其工作原理是通过齿轮或蜗轮蜗杆传动控制凸轮(或滑块)断开或接通触点来实现对起升电路的控制。其原理如图6所示。

图6 齿轮齿条传动式位置限制器原理图
2 常见的高度位置限制器接线形式
以上是几种常见的高度位置限制器的结构形式,下面分析不同形式的接线及优缺点。
2.1 直接切断动力回路
对于断开电动机动力回路的断火器,由于其切断的为电动机的动力回路,理论上讲这种形式较为可靠,但对于大功率的电机,由于电动机的工作电流较大,易烧蚀触点,其可靠性大幅降低,故这种限位方法只适用于轻小型起重机上。同时由于导绳器受歪拉斜吊造成部件的损坏,极易造成高度位置限制器的失效。加装后的控制接线有2种形式,第1种形式为在上升电路的控制电路中串入加装后的位置限制器常闭触点SQ2,通过断开上升接触器的线圈,使电动机失去动力电源。如图7所示。
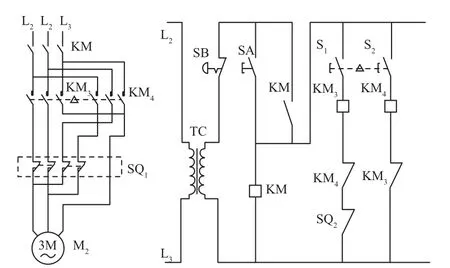
图7 上升回路中串接位置限制器触点
第2种方法是接到起重机的控制主回路中,在控制主回路中串入第二套位置限制器的常闭触点SQ3,当位置限制器触点SQ3动作后,起重机的控制电路全部失电,必须人为使触点闭合才能恢复起重机控制电路的正常供电。如图8所示。
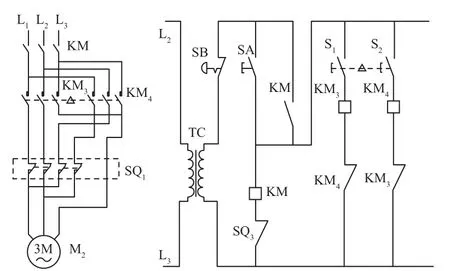
图8 控制主回路中串接位置限制器触点
2.2 直接切断起升控制回路
对于中大型起重机械常采用凸轮或主令控制,由于只有一套高度限位器,在使用过程中重锤式或压板式存在的铰接处锈蚀、卡阻、触点粘连和弹簧失效等原因,也是这次要求加装第二套高度限位的原因。其接线形式有2种,第1种是将第二套限位的常闭触点K2通过中间继电器JD1接入电路中,通过继电器的常闭触点JD1接入上升回路,用于控制上升回路的接触器,如图9所示。

图9 上升回路中串接第二套位置限制器
第2种接线形式是将第二套限位器的常闭触点K2接入1个中间继电器JD2接入电路,将继电器的常闭触点JD2接入控制电路的主回路中,当第二套限位器的常闭触点动作时,必须采用人工复位的方法才能使起重机得电运行,如图10所示。
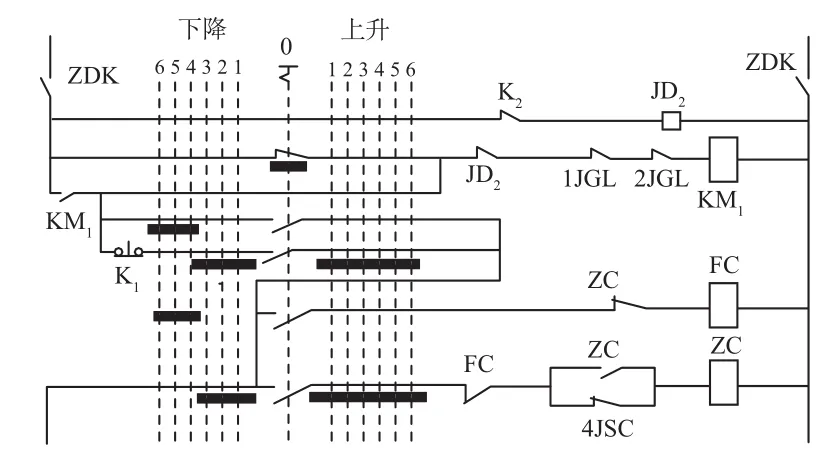
图10 控制主回路中串接第二套位置限制器
对于第4种形式的齿轮或蜗轮蜗杆传动式高度限位器由于其工作的可靠性较高,这里就不再讨论。
3 对常见接线形式的分析
通过对断火式和重锤式(含压板式)位置限制器加装第二套时存在的不同接线形式做以下讨论:
第1种接线形式是在起升回路中串入第二套限位的常闭触点,如图7中的SQ2触点和图9中的中间继电器的JD1触点来进行控制的方式。这种接线方式比较简单,但存在着同一个缺点,就是在工作和检查中很难发现其中的某一套限位器失效,也不能正确判断是哪一套限位器动作。图7中接入的SQ2触点和图9中接入的JD1触点,虽然都能够满足TSG Q0002—2008 《起重机械安全技术监察规程——桥式起重机》中第七十条对双限位的要求,即规定“应当设置不同形式的上升极限位置的双重限位器,并且能够控制不同的断路装置”的要求[4],但当其中的一套限位器失效时并不能够发现这种隐患和风险,如果此时第二套限位器也发生了失效时,事故就不可避免地发生了,这就失去了加装第二套高度限位器的意义。正是由于这个风险存在,这种接线方式是不科学的,不能满足对事故和风险的预防。
下面分析第2种接线方式,即加装后的第二套限位器的触点接入控制电路的主回路中,如图8中SQ3触点和图10中的JD2触点接线方式。这种接线方式是在控制的主回路中串入第二套高度位置限制器的常闭触点或通过中间继电器的常闭触点来进行控制。当第二套限位装置动作时,切断控制主回路的电源,这时起重机的控制回路失电,各机构均停止工作,需要人为地恢复该位置限制器的触点,同时由于该触点的动作,也可以判断出第一套限位器处于失效状态。这样在人为恢复过程中,同时也对第一套限位器进行检查和修复,可消除两套高度位置限制器同时失效带来的事故隐患。由此,通过人为复位过程与修复,可以实现起升高度位置限制的本质安全,更为合理。
4 实现本质安全的接线方式
通过以上分析,可以得出结论,在加装第二套限位器时,应将其常闭触点串入控制电路的主回路中,当第二套限位器动作时,必须通过人为恢复才能使起重机械正常供电,通过人为恢复且能够及时发现和排除第一套限位器的失效,从而消除了起重机械由于高度限位器失效带来的风险和事故隐患。此种线路图8和图10中的高度位置限制器触点的接入,韩国产的半岛葫芦其接线形式原理也是采用这种。其特点是既能满足TSG Q0002—2008中对双限位的要求,即规定“应当设置不同形式的上升极限位置的双重限位器,并且能够控制不同的断路装置”的要求,同时也满足GB/T 6067.1—2010《起重机械安全规程 第1部分:总则》中9.2.1中规定的“在特殊情况下,如吊运熔融金属,还应装设防止越程冲顶的第二级起升高度限位器,第二级起升高度限位器应分断更高一级的动力电源”的要求[5]。在本质上真正实现消除由于过起升而造成的事故隐患和风险。
5 结束语
通过以上分析,对于目前正在加装的第二套高度位置限制器的制造、修理和检验来说,如何实现起重机械的本质安全是十分重要的,不同的接线形式会取得不同的安全效果,在满足“应当设置不同形式的上升极限位置的双重限位器,并且能够控制不同的断路装置”的要求的同时,也要满足“第二级起升高度限位器应分断更高一级的动力电源”的要求,这是制造、维修和检验人员在实施加装过程中的重点。通过科学地接入控制回路,大幅度降低起重机械安全生产事故,这将对提升起重机械安全水平产生深远影响。
猜你喜欢
科学大众·小诺贝尔(2023年6期)2023-05-31 21:44:32
中国特种设备安全(2023年2期)2023-03-16 11:09:08
水力发电(2022年11期)2022-12-08 06:18:08
汽车零部件(2021年2期)2021-03-05 01:38:56
汽车实用技术(2020年12期)2020-10-21 04:14:03
中国特种设备安全(2019年11期)2020-01-16 08:05:56
北京航空航天大学学报(2017年4期)2017-11-23 05:48:54
作文大王·低年级(2017年4期)2017-04-10 20:36:36
广西科技大学学报(2016年4期)2016-11-21 09:34:28
专用汽车(2015年1期)2015-03-01 04:05:29