基于PID串并联结构可变的复合电源再生制动控制方法
2023-02-17 09:33任欣欣倪骁骅
农机使用与维修 2023年2期
任欣欣,倪骁骅
(盐城工学院 汽车工程学院,江苏 盐城 224051)
0 引言
增程式电动汽车具有开发周期短、成本低和续航里程长等优势,在新能源汽车行业中有广泛应用,但仍然存在动力电池维修和更换成本高,充电时间长等诸多问题[1]。建立串并联可变的动力电池——超级电容复合电源,利用超级电容的特性,回收再生制动能量,在再生制动过程中,动力电池不参与,保护了动力电池,避免再生制动过程中充电的大电流等对动力电池的伤害,减少修理和更换动力电池的成本。重点研究再生制动控制策略,优化控制策略,让制动电流更加稳定,既有良好的制动效果,又能够提高能量回收率及利用率,引入超级电容保护动力电池是提升增程式电动汽车动力电池的使用寿命的重要方式之一。
再生制动是在增程式电动汽车制动时,通过电机反转产生制动转矩将机械能转化为电能的过程[2],将电能通过储能系统储存并在驱动时充分利用。目前,增程式电动汽车再生制动系统大多将电能直接储存在动力电池中,一般采用通过制动力矩、功率等的计算建立模型或者制动力分配策略或设计再生制动系统等。如周美兰等[3]建立了整车动力模型,加入汽车加速度、加速度变化率和道路坡度因素,通过计算在制动时制动力矩占总制动力的比例作为控制条件来准确预测和控制电机制动电流大小。崔弘等[4]提出了优化再生制动力的方法,并结合摩擦制动力分配策略建立了控制系统。葛德顺[5]等提出了串联复合电源再生控制方法,利用二极管D单向导通特性,整流器的晶闸管导通与截止的完成对再生制动的控制。
对于复合电源动力电池——超级电容组成,通过是否与二极管、电感等无源器件直接相连成储能元件分为无源式和有源式两大类[6]。有源式复合电源结构中有功率变换器,可以对复合电源充放电进行控制,根据不同工况进行功率分配,提高效率,改善系统能量利用率;而无源式结构简单,无特定的单元对复合电源充放电进行控制。有源式结构在组成的复合电源中加入功率变换装置,其特点是可以对超级电容或蓄电池的充放电电流进行控制,从而根据不同工况有效对复合电源进行功率分配,提高复合电源效率,显著改善系统能量利用率。因此,设计复合电源进入再生制动状态通过二极管、直流接触器断开动力电池和超级电容的连接,使动力电池不参与制动能量回收,结构简单,回收率高,减少大电流对动力电池的损伤;驱动状态通过超级电容串联DC/DC变换器和动力电池并联驱动,可以提高能量利用率[7]。
从减少动力电池更换和维修成本出发,利用超级电容功率密度高、充放电快等特点,建立串并联可变的复合电源基本结构,结构简单,减少了并联结构中DC/DC转换器等。根据再生制动过程特点控制制动电流,在MATLAB/Simulink平台上对动态模型预测控制器控制再生制动超级电容端电压制动恒定电流的控制方法进行验证,证明其有效性,优化了控制器,证明了优化之后其电流更加稳定,并拟合了制动踏板和电制动力之间的线性关系,具有更好的制动效果。
1 串并联可调复合电源结构与功能
1.1 复合电源的基本结构
为了解决复合电源串联或者并联后会产生一定的再生制动能量回收和利用的损耗等问题,建立了一种串并联可调的复合电源,使动力电池不参与制动再生的过程,保护了动力电池。如图1所示。当再生制动控制开关K接通时,复合电源并联,此时电机是驱动的过程;当再生制动控制开关K断开时,动力电池和超级电容是串联,电机处于制动状态,这时动力电池不参与再生制动能量回收,因为整流桥将二极管施加方向电压,处于截止状态。
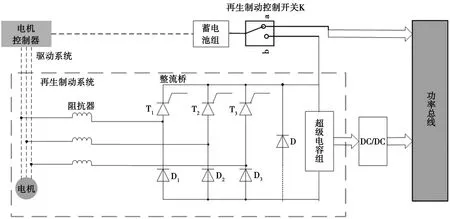
图1 复合能源串并联结构
1.2 复合电源的工作模式
通过确定复合电源基本结构,确定了驱动和再生制动两种工作模式,在驱动模式时,再生制动控制开关K是a点闭合,超级电容通过DC/DC变换器和动力电池并联,二极管D通反向电压,动力电池和超级电容并联驱动;当超级电容电量放完,二极管D将超级电容短路,动力电池单独驱动。
在再生制动模式时,再生制动控制开关K是b点闭合,动力电池和超级电容串联,而此时若没有加速踏板和制动踏板信号,汽车处于停止状态或者滑行状态,依据速度信号判断两种状态。控制器输出占空比PWM低电平信号,整流桥不工作,若速度不为0时,则是滑行状态,驾驶员踩下制动踏板,整流桥的晶闸管截止,无法进入再生制动回收系统,车辆依靠机械摩擦制动;当驾驶员踩下制动踏板,电机转速和超级电容端电压达到工作条件后,控制器输出PWM信号控制整流器的晶闸管打开,电机将作为发电机对超级电容充电,进入再生制动模式。电路图及信号流经如图2所示。

图2 复合电源工作模式的信号和电路流经
1.3 复合电源结构分析
纯电动汽车的复合电源控制和制动控制相对复杂,且两者的本质均属于非线性控制[8]。倘若在不添加硬件资源的条件下,很难用常规控制来设计两种控制器。复合电源纯电动汽车的车载电源系统需要综合车辆的动力性、两种能源的协调等问题,而再生制动系统需要结合制动安全、储能器件安全、电机特性等问题,从而增加了复合电源纯电动汽车电源系统、制动系统研究的难度。随着纯电动汽车行业日益发展,相关的控制策略和控制方法的研究也愈来愈重要[9]。目前,关于复合电源纯电动汽车两种能源的协调控制、制动系统中电机制动与摩擦制动的协同控制包括实时优化控制、逻辑门限值控制和模糊控制三种策略。
实时优化控制策略的目标函数必须建立在汽车动力性、制动回收率、燃油经济性等因素的基础上,通过实时将行驶过程中电机消耗的电量折算成等效的燃油消耗,获得目标函数的最小值,实现能量的最优配置[10]。实时优化控制策略所需控制的量多,计算量非常大,且实时控制需要由芯片来实现,增加了成本,故目前还难以广泛运用于电动汽车上。逻辑门限值控制方法最早被提出于20世纪中期[11]。该控制策略能够事先对控制参数设定门限值,在系统工作过程中,通过比较实时参数值与门限值的大小,给出对应判断与指令。逻辑门限控制策略无需构建详细系统的数学模型,结构原理易实现、控制过程简单、反应速度快、成本低,有效避免复杂的理论分析[12]。其控制效果的优劣取决于参数值的精确度,如果选取的控制参数合理,则可具备良好的非线性控制效果,可以满足各种车辆的要求。
车辆实际工作过程中,车载电源状态时刻发生改变,逻辑门限值控制方法难以实现实时性,且波动较大,使车载系统或制动系统的工作受限。模糊逻辑控制是一种智能化控制,源自于美国教授 L.A.Zadeh 所提的模糊集合理论,并在 1974 年被英国玛丹尼教授成功应用于加热器的控制,如今已广泛运用于家用电器、工业生产控制、军事、电梯、地铁等复杂非线性系统中。模糊控制不用构建被控对象的数学模型就能实现多参数、多目标和非线性控制,其鲁棒性和适应性较好。模糊控制的核心技术为控制规则,该规则结合人们经验总结,以简单易懂的条件语句表示,但若模糊控制规则过多,则不利于运算速度,导致反应时间延长。另外,模糊控制器构造容易,有利于人机对话,其算法的实现结构与常见的数字控制系统也十分相似。
2 控制方法
通过输出固定占空比PWM控制超级电容端电压,即整流电路晶闸管的通断,从而使再生制动电流恒定。预设好一个或几个固定占空比,根据不同再生制动强度要求分类输出。通过制动踏板和加速踏板确定复合电源工作状态,通过制动踏板开度和踩踏板速度判断制动模式和制动强度,同时根据超级电容电压状态、车速状况判断是否可以进行再生制动,以及是否可以提供的再生制动力大小。综合判断后利用固定占空比将再生制动强度分为4种状态,即不进行再生制动、较小强度再生制动、较大强度再生制动和最大化再生制动,对应的输出占空比分别为0,30%,60%和100%的PWM信号驱动整流桥,设计的控制仿真图如图3所示。
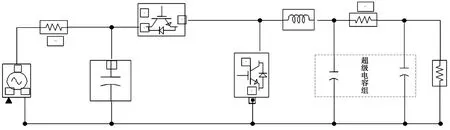
图3 基于固定占空比PWM恒定电流再生制动控制仿真图
在制动过程中,超级电容和动力电池串联组成复合电源,动力电池不参与再生制动,在仿真过程中,电机将充当发电机,通过整流器某一组晶闸管导通,对超级电容充电过程仿真结果如图4所示。超级电容容量为175 F,额定电压为56 V,初始电压设置的是12 V。再生制动仿真是车速从0加速到30 km·h-1,消耗电池电量,当通过直流接触器KM和二极管D将动力电池与超级电容断开连接,自驾驶员踩下制动踏板开始,即能够对超级电容充电,控制器输出0,30%,60%和100%固定的占空比,达到再生制动电流恒定。由图4的仿真结果可知,当控制器输出对应固定占空比的制动电流波形,其中瞬时电流采样频率为1 kHz,在不同占空比下制动电流瞬时值最大达300 A,而平均电流有一些差异。不同占空比PWM输出,电制动时间是不一致,可以看出占空比100%的持续时间最短5.3 s,占空比60%持续时间达9.3 s,由不同再生制动电流导致的制动效果不同,即当电机制动车速为10 km·h-1时车辆停止,通过不同占空比PWM输出,控制时间长短不同,而当停止后,电机制动时的反电动势提供的电压小于整流器导通条件的电压,因此,仿真结果表明,以输出不同固定占空比PWM的方式控制再生制动电流恒定是方法有效。
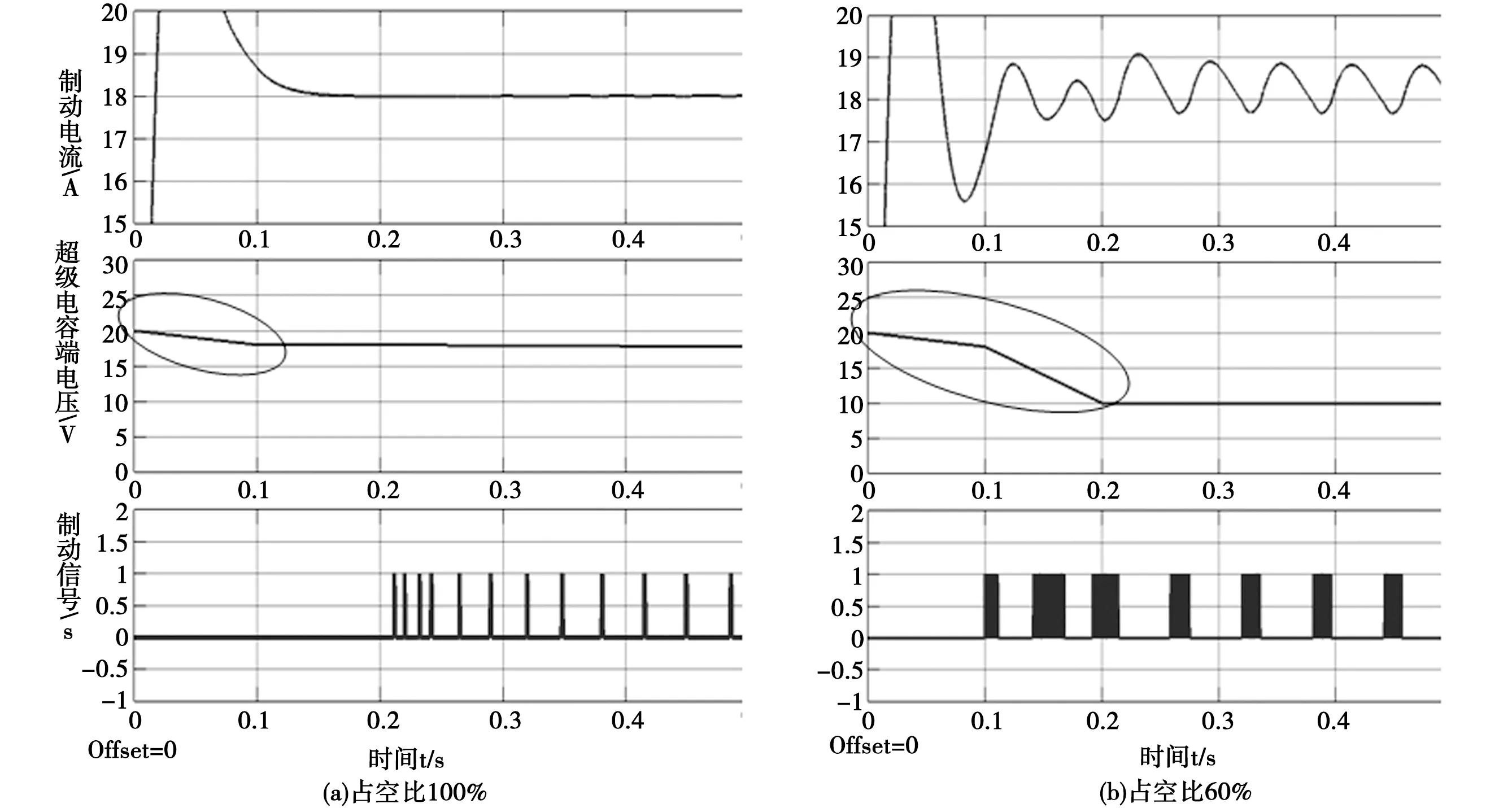
图4 仿真结果图
3 基于PID闭环控制方法优化
基于PID超级电容端电压的闭环再生制动电流的控制策略,以增程式电动汽车为平台,考虑车辆运行状态,通过霍尔传感器实时监测车辆速度,计算电机反电动势,结合超级电容两端电压,通过输出连续占空比PWM,以目标再生制动电流恒定为目标,基于PID形成闭环控制,达到实际电流恒定,不断反馈调节。控制逻辑如图5所示。
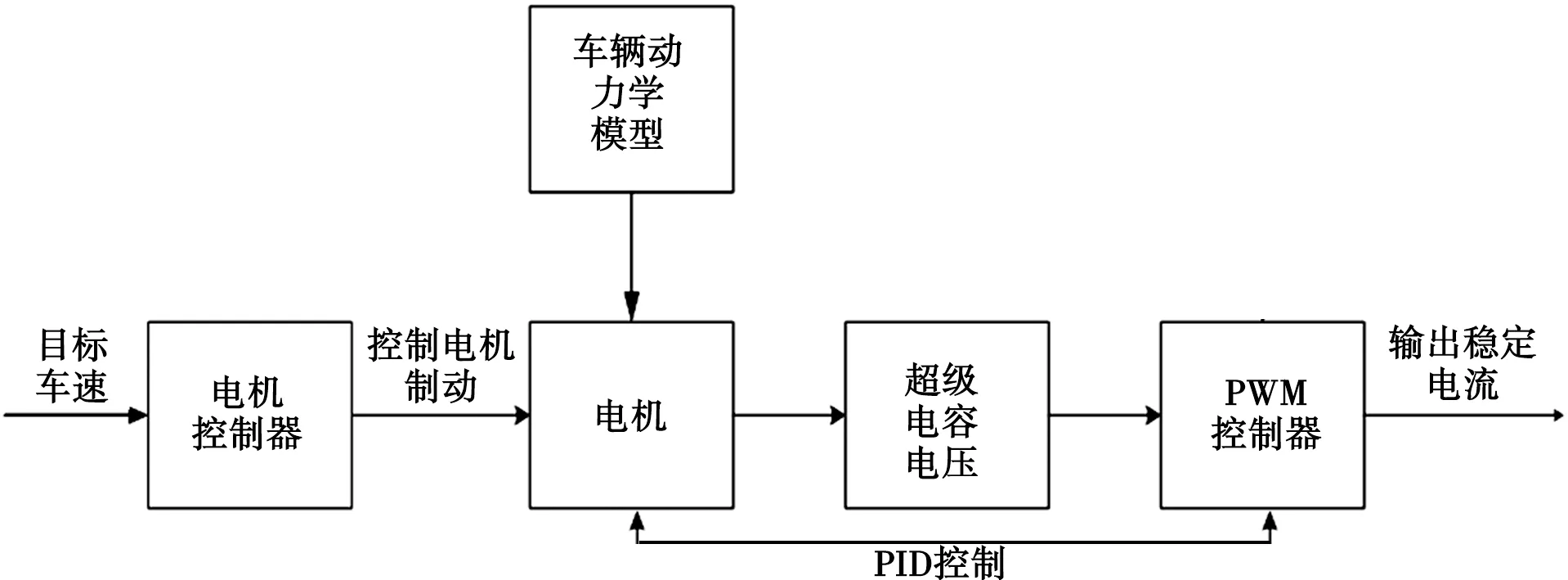
图5 超级电容端电压的恒电流闭环控制逻辑图
该控制逻辑为:开始,判断是否是制动状态,根据电控单元(Electronic Control Unit, ECU)实时传输霍尔传感器信号,若为制动状态,根据车速和电机反电动势大小,计算目标再生制动电流I大小,占空比PWM初始值为0,整流电路输出电压U0,超级电容端电压Uc大小由电压传感器实时传输。
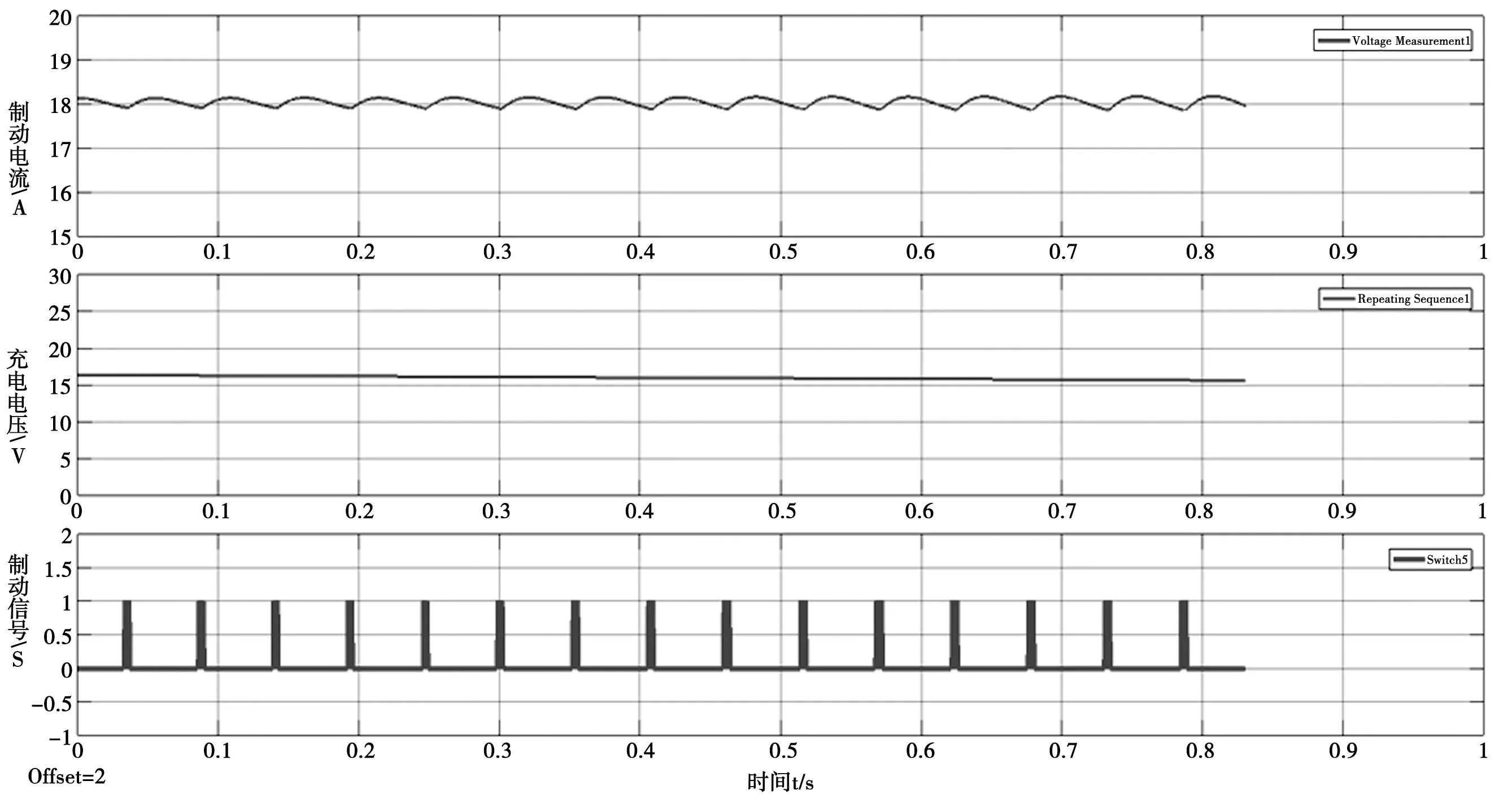
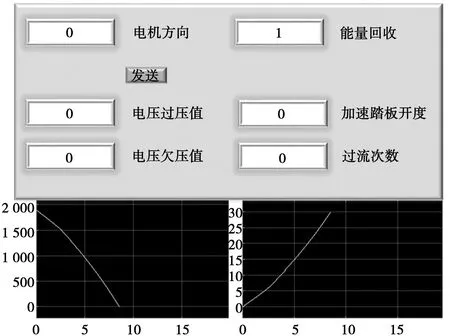
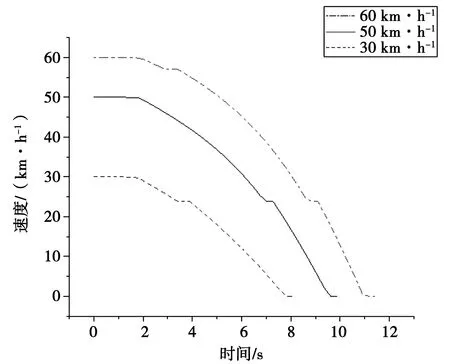
U0 U0>Uc,需要进行电制动,电机产生反电动势,根据公式D=I×Re/(U0-UC)计算占空比。 D>100%,系统无法提供目标制动电流,占空比输出100%,应用电机制动转矩最大化控制策略;在再生制动过程中,电制动产生最大电磁转矩为 电机产生最大功率的最大电磁转矩为 其中ω为电机转速;Pi为电机输入功率;ψf电机转子磁链矢量。 若0 D=I×Re/(U0-UC)输出。 之后再计算下一时间的D,通过PID控制器不断反馈,循环到流程结束为止。复合电源仿真图如图6所示。 图6 基于PID复合电源再生制动控制仿真 以超级电容输出恒定电压为控制目标,如图7所示,以制动电流为工作模式选择为依据完成再生制动能量回收。 图7 仿真结果 通过进入再生制动模式,将回收电能储存在超级电容中,并且有效进行并联驱动,在增程式电动汽车再生制动台架上作相应实验。软件控制监控面板如图8所示,其制动性、驱动性和能耗的情况分析如下。 图8 监控控制面板 制动初始速度分别设定为60 km·h-1,45 km·h-1,30 km·h-1,速度减小到0的时间是不一样的,但是制动力矩和制动踏板线性度拟合,制动效果良好,通过目标制动电流恒定,不断反馈调节,超级电容端电压也相对稳定,通过控制器输出占空比,实际电流和目标电流不断调节,控制器是有效的。 图9 制动速度与时间 根据串并联可调复合电源系统,根据再生制动主电路模型,通过再生制动控制开关K和直流接触器KM、二极管D充分保护动力电池,避免在再生制动过程中过充和过放而对动力电池的损害。再生制动过程中,动力电池和超级电容串联,将电能储存在超级电容中,动力电池不参与再生制动。根据建立最大制动力矩模型保证在驱动时,固定输出功率,超级电容和动力电池串联和并联驱动是可调的。根据占空比PWM输出分为开环和闭环控制,仿真得到闭环控制良好的控制性能,并且方案可行。 (05)
4 复合电源再生制动试验研究
4.1 再生制动试验设计
4.1 整车滑行试验
5 结语
猜你喜欢
车主之友(2022年6期)2023-01-30黄河之声(2019年23期)2019-12-17汽车实用技术(2019年17期)2019-09-21水电站机电技术(2017年9期)2017-09-26资源再生(2017年4期)2017-06-15黄河之声(2017年13期)2017-01-28微特电机(2016年3期)2016-11-29电源技术(2016年9期)2016-02-27电源技术(2016年2期)2016-02-27江苏通信(2014年4期)2014-04-14