农业机械目标定位及检测技术
2023-02-17 09:33田华
农机使用与维修 2023年2期
田 华
(长春市九台区莽卡满族乡综合服务中心 农业农机技术服务科,长春 130500)
0 引言
随着农业生产要求不断提升和农业劳动力转移,对农业机械提出了更高要求,农业机械化正向智能化方向发展,对于提高农业生产效率、降低农业劳动强度具有重要意义。
农业机械目标定位及检测技术是农业机械智能化发展的重要方向,是实现农业机械无人化发展的支撑技术之一,主要是基于视觉识别技术、计算机技术、图像处理技术、人工智能技术等为一体,利用计算机模拟人类的视觉功能,通过图像采集与处理技术,将图像信息转化为数字信号,进而获取目标图像并实现田间定位与检测。目前,目标定位及检测技术已经广泛应用于航空航天、医学成像、交通物流和工业生产等领域,在农业采摘、食品加工、机械生产和包装分类等方面替代人工实现高效生产。
目前,视觉识别及定位检测技术主要是基于ORB特征点匹配和SIFT特征提取技术,但是由于农业生产环境较为复杂,现有技术无法实现对田间作业目标的精准定位与检测,农业机械视觉识别系统存在目标识别模糊、分类效率差和响应速度慢等问题,影响农业机械田间工作质量与工作效率。随着深度学习及人工智能技术的逐渐发展,卷积神经网络及YOLO,算法逐渐应用于目标定位与检测技术中,响应速度块,定位精准度较高。
1 神经网络模型构建
本研究基于YOLOX算法进行图像识别与样本库构建,用于视觉识别系统的目标特征向量提取、定位和检测技术,总体工作流程图如图1所示。
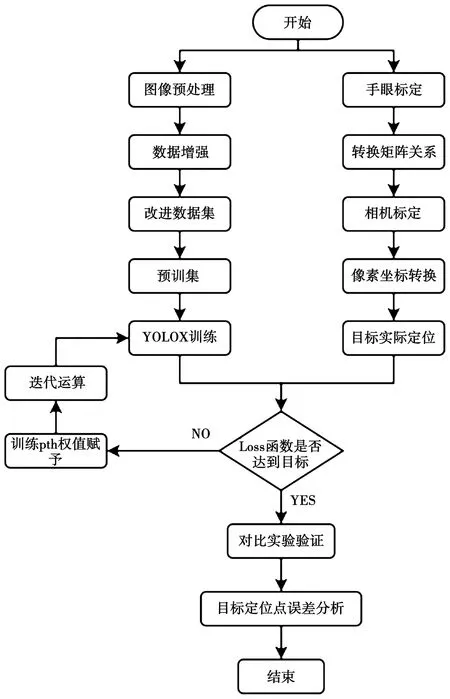
图1 YOLOX算法工作流程图
为了增加训练数据集,提高目标识别能力,本研究采用离线重采样,在目标采集图像中增强目标样本后,使用两倍的重采样率来处理图像集,由于图像在输入到网络之前需要进行预处理,预处理后的数据不完全相同,因此训练集不会过度拟合。本研究采集的图像集为高分辨率,如果将这些数据直接输入网络进行训练,在训练过程中会因压缩而失去很多有用的语义信息,减少目标特征提取效率,因此,使用多尺度训练来提高模型的性能,并随机选择每个量表在每个时期进行训练,增加训练样本的多样性。在输入端加入Focus结构用于增加图像通道数量,优化后的YOLOX-x算法工作流程图如图2所示。
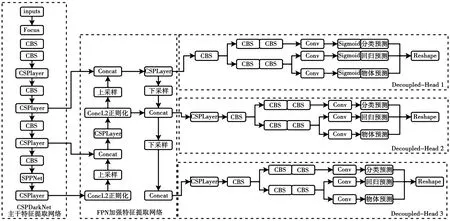
图2 YOLOX-x算法工作流程图
2 特征提取
传统的视觉识别系统采用卷积神经网络进行特征提取,检测目标的形状和颜色等关键特征信息,高分辨率特征信息。针对传统卷积神经网络排模型在目标检测与特征提取中存在的问题,采用HRNet高资源作为特征提取网络,减少特征信息损失。将CBAM注意机制添加到HRNet的第一级特征提取和第二、三、四级特征融合中,在第一阶段加入CBAM融合模块,使网络能够锁定在特征提取初始阶段的目标特征,在第二阶段加入CBAM融合模块,在第二阶段、第三阶段和第四阶段能充分提取到重要的目标特征信息。
3 结果与分析
3.1 试验材料与设备
操作平台为台式计算机,运行环境为Ubuntu 18.04,主频4.10 GHz,16 G运行内存,1 TB机械硬盘,使用GPU加速计算,在Python编程语言下,运用PyCharm书写调试大量代码,对提出的YOLOX-x算法与传统的YOLOX、YOLOXv3、YOLOXv4和卷积神经网络Faster-RCNN进行田间对比验证。模型设置中,学习效率为0.005,迭代次数为10×103次,权值衰减设置为0.005。
3.2 模型对比试验结果
3.2.1 目标检测精度
选择平均精度(AP)作为评估指标,对田间目标正常位姿、物体重叠进行检测与分析,试验结果如表1所示。研究结果表明,在正常位姿检测中,YOLOX-x算法较YOLOX、YOLOXv3、YOLOXv4和卷积神经网络Faster-RCNN准确率提升7.76%,9.12%,1.51%和0.15%;在物体重叠情况下,YOLOX-x算法较YOLOX、YOLOXv3、YOLOXv4和卷积神经网络Faster-RCNN准确率分别提升19.97%,18.69%,2.73%和1.61%;在目标检测精度中,YOLOX-x算法较YOLOX、YOLOXv3、YOLOXv4和卷积神经网络Faster-RCNN分别提升10.65%,9.05%,1.99%和0.87%;YOLOX-x响应速度较YOLOX、YOLOXv3、YOLOXv4和Faster-RCNN分别提升63.51%,34.51%,27.45%和67.96%,因此,YOLOX-x算法在田间目标定位与检测中存在较高的精度。

表1 不同算法下农业机械目标检测精度结果分析
3.2.2 农业机械定位
在对田间目标检测结束后,农业机械需要进行定位试验,通过对比农业机械实际运行坐标点与算法模拟坐标点进行差异性分析,重复实验误差计算公式如式(1)所示,不同算法下试验结果如表2所示,YOLOX-x定位误差较YOLOX、YOLOXv3、YOLOXv4和Faster-RCNN分别提升28.94%,25.28%,24.60%和16.08%。
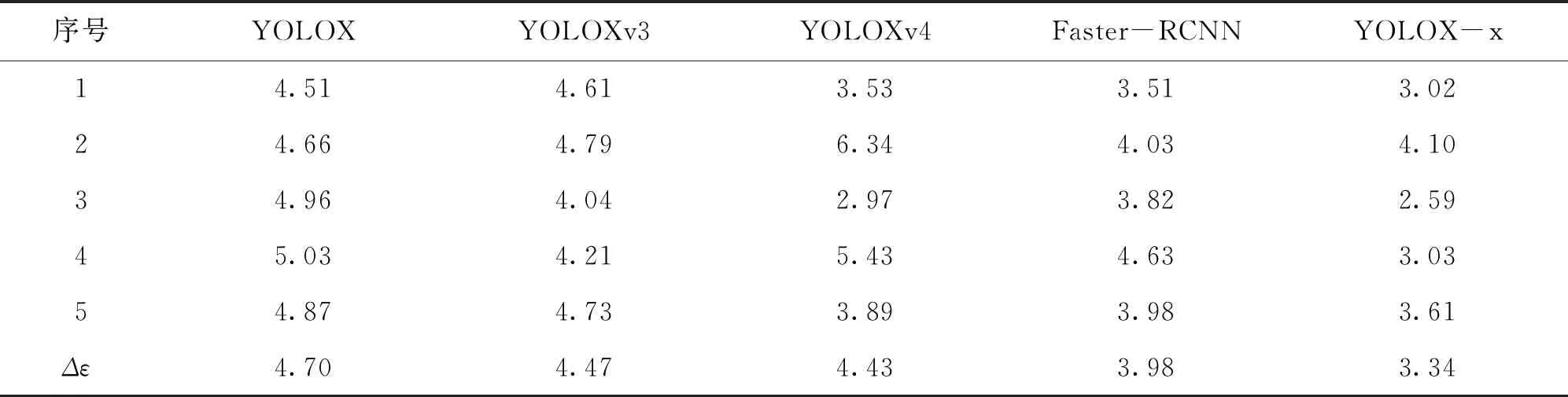
表2 农业机械定位误差分析 单位:%

(1)
式中,(xend,yend)为基于各项算法下的农业机械田间坐标,(xobject,yobject)为农业机械田间实际定位坐标。
4 结论
为了解决农业机械视觉识别系统存在目标识别模糊、分类效率差和响应速度慢等问题,提出一种YOLOX优化算法——YOLOX-x,并通过田间试验进行验证,主要得出以下结论:
1)为了增加训练数据集,提高目标识别能力,采用离线重采样,在目标采集图像中增强目标样本后,使用两倍的重采样率处理图像集,并随机选择每个量表在每个时期进行训练,增加训练样本的多样性。在输入端加入Focus结构用于增加图像通道数量。
2)本研究采用HRNet高资源作为特征提取网络,减少特征信息损失。将CBAM注意机制添加到HRNet的第一级特征提取和第二、三、四级特征融合中,能够充分提取到重要的目标特征信息。
3)本研究提出的YOLOX-x算法较YOLOX、YOLOXv3、YOLOXv4和卷积神经网络Faster-RCNN在田间目标检测准确率和响应速度都得到较大提升,在正常位姿和物体重叠的情况下定位识别中精度达到94.03%和91.56%,研究结果对于农业机械田间定位检测技术提供技术参考与理论借鉴。
(05)
猜你喜欢
科教新报(2023年13期)2023-08-15
今日农业(2021年8期)2021-11-28
今日农业(2021年2期)2021-03-19
金桥(2020年9期)2020-10-27
四川农业与农机(2019年4期)2019-08-29
电子制作(2018年19期)2018-11-14
自动化学报(2017年11期)2017-04-04
噪声与振动控制(2015年4期)2015-01-01
河南科技(2014年1期)2014-02-27
轴承(2010年2期)2010-07-28