核磁共振陀螺内嵌参量调制磁强计性能分析
2023-02-16 01:22:54范晓婷刘运全刘院省
中国惯性技术学报 2023年1期
黄 伟,范晓婷,刘运全,刘院省
(1.中国航天科技集团有限公司量子工程研究中心,北京 100094;2.北京航天控制仪器研究所,北京 100039;3.北京大学 物理学院,北京 100871)
惯性导航具备隐蔽性好、抗干扰能力强、不受时间和空间限制等优势,成为武器装备自主导航的主要技术手段[1-3],惯性导航系统中的陀螺仪性能指标直接影响导航精度。近年来随着原子陀螺仪技术的蓬勃发展,原子惯性测量成为惯性技术领域的研究热点。核磁共振陀螺仪作为成熟度最高的原子陀螺,因具备高精度、小型化和低功耗的优点而备受关注[4-6]。2016年美国Northrop Grumman 公司实现了零偏稳定性0.01 °/h 的核磁共振陀螺样机,验证了核磁共振陀螺仪具备光学陀螺的精度,同时兼有对加速度不敏感、测量范围大、小体积等优势,未来有望推动武器装备自主导航系统的升级换代[7,8]。
核磁共振陀螺仪以惰性气体原子作为工作介质,通过内嵌碱金属磁强计获得处于磁共振态下原子核自旋磁矩信号以实现对载体转动角速度的测量,对原子核磁矩的探测过程直接影响陀螺输出噪声、角度随机游走等关键性能指标,同时也影响原子核自旋系综的磁共振闭环稳定控制精度。为全面分析核磁共振陀螺中噪声与测量误差源,本文开展了核磁共振陀螺内嵌参量调制磁强计特性研究,讨论了核自旋磁矩探测噪声,动态核自旋磁矩探测相位误差,建立理论模型并数值分析了磁矩探测过程中的各类误差源。
1 参量调制磁强计基本原理
核磁共振陀螺仪通过构建参量调制磁强计获得横向(x-y 平面)矢量磁场信息,工作原理如图1 所示。圆偏振泵浦光沿z轴方向入射原子气室用于极化87Rb原子,同时在z轴施加包含直流和交流部分的磁场Bz,其中Bz=B0+Bccos(ωct)。

图1 参量调制磁强计工作原理示意图Fig.1 Schematic diagram of parametric modulation magnetometer
87Rb 原子的宏观磁矩的动力学过程可通过Bloch 方程表示[9,10]:


其中,T1和T2分别为87Rb 原子的纵向和横向弛豫时间。
使用一束线偏振光作为探测光,沿x 轴穿过原子气室。由于此时气室内原子被极化,探测光对应左旋圆偏振光和右旋圆偏振光成分之间产生非零的相位差,在偏振态上体现为偏振面旋转一个角度,该偏转角θ可表示为[7]:

其中,re为电子半径,c为光速,l为光程,μe为电子自旋磁矩,ν为探测激光频率,ΓD1表示碱金属原子D1 线展宽。
为获得核自旋磁矩的信息,一般通过横向差分探测光路获得,线偏振探测光沿x轴入射原子气室后被偏振分光棱镜和反射棱镜构成的光学模块分为P 光和S 光,两探测器接收光强分别为[11]:

差分后信号表示为I0sin(2θ)≈2I0θ=2CI0Mx,其中Mx可由如下求解过程得到。
令M+=Mx+iMy,得到如下通解:

其中,β=,Jn(β)为n阶第一类贝塞尔函数,n和p均为整数。当满足条件γB0+nωc=0时,87Rb原子产生共振,故取n=-1 为实验条件[10],载波频率为ωc=γB0,由式(5)得到:

M+实部取p=1,得到:

因此,差分后信号中横向双轴磁场分别通过sin(ωct)和 cos(ωct)进行解调得到:

如式(8)(9)所示,使用相互正交的解调信号可分别得到正比于x和y方向上的待测磁场大小,上述过程即为参量调制磁强计的工作原理。
2 原子磁矩测量误差分析
核磁共振陀螺仪通过内嵌参量调制碱金属磁强计探测处于磁共振状态下的原子核进动磁矩来获得载体的转动速度信息,其精度主要受限于原子核自旋极化和核自旋磁矩探测过程。如式(8)(9)所示,在磁矩探测过程中参量调制磁强计获得的磁场信息受z轴调制磁场频率ωc和幅度Bc、碱金属原子横向弛豫时间T2等多种参数影响。针对核磁共振陀螺中的磁矩测量需求,本文分别分析磁强计测量静态磁场的噪声特性和测量动态周期信号的相位误差。
2.1 磁测量噪声
根据核磁共振陀螺中参量调制磁强计的工作原理,可将磁强计噪声如图2 所示进行分类。

图2 参量调制磁强计噪声分类及来源Fig.2 Noise classification and source of parametric modulation magnetometer
如图2 所示,噪声来源主要分为三个方面,分别是量子噪声、技术噪声和环境噪声。
2.1.1 量子噪声
量子噪声源于海森堡测不准原理,是对碱金属原子磁力仪灵敏度的基本限制,主要包括自旋投影噪声
和探测光散粒噪声。其中散粒噪声δBSN∝1/(ϕ为探测光光通量)通常在实验条件下小于自旋投影噪声,且弱于探测光使极化率退化等其他作用带来的影响,故本文不做详细讨论。原子自旋投影噪声是指由原子磁矩不确定性引起的测量噪声,其限制了磁强计的极限灵敏度,主要与碱金属原子密度,温度相关,其噪声密度可表示为[12,13]:

其中87Rb 原子旋磁比γ为7 kHz/μT,T2取典型值1 ms,V表示有效测量体积,原子密度n与气室温度相关[14]。
图3 所示为参量调制磁强计极限灵敏度与气室温度及有效测量体积的关系,从图中可以看出,随着气室温度提高和有效测量体积的增大,均可有效降低磁强计的极限灵敏度,随着温度的升高灵敏度呈指数型下降。

图3 参量调制磁强计灵敏度与气室温度及有效测量体积的关系Fig.3 Sensitivity of parametric modulation magnetometer V.S.cell’s temperature with different effective volume
2.1.2 环境噪声
磁场噪声指由磁屏蔽引入的磁场噪声。核磁共振陀螺中的磁屏蔽通常采用坡莫合金材料,材料中电子的热运动会产生Johnson 电流噪声δBJoh和热磁化噪声δBMagn,可分别表示为[15-17]:

其中,μ0为真空磁导率,kB为玻尔兹曼常数,T为开尔文温度,σ为电导率,R为磁屏蔽桶半径,Th为磁屏蔽桶厚度,G表征圆柱形磁屏蔽结构特性[15],当磁屏蔽桶长度和直径比分别为1、1.5 和2 时,G分别为0.657,0.460 和0.438;μR和μI分别为相对磁导率的实部与虚部,ωd为驱动磁场频率。
根据核磁共振陀螺仪工作条件,磁屏蔽桶半径R取27 mm,厚度Th取1 mm,驱动磁场频率分别为25 Hz、85 Hz 和50 kHz,计算得到在温度为25℃下,Johnson 电流噪声δBJoh约为1.25fT,热磁化噪声δBMagn约为0.02fT。
在核磁共振陀螺中,碱金属磁强计探测到的信号包含气室中惰性气体原子核自旋进动产生的磁矩信息,碱金属原子敏感到的核子磁场大小表示为:

其中,κ为费米接触常数,Mn为惰性气体核自旋磁矩,µn为单个核子自旋磁矩,Nn为惰性气体原子数,Pn为惰性气体原子极化率。根据陀螺条件,惰性气体选用129Xe,当10 torr 的129Xe 极化率达到1%时,计算可得碱金属磁强计敏感到的磁场大小约为6.3 nT。磁场噪声的探测信号的信噪比表示为:
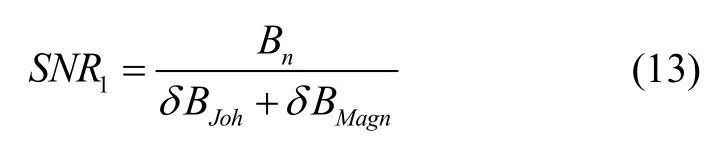
根据上述计算结果,得到信噪比约为134 dB。陀螺工作状态下,原子气室加热温度在130 °C 左右,长时间工作会导致磁屏蔽周围温度升高,磁场噪声会随之增大,引起信噪比劣化。磁场噪声和磁强计信噪比与温度的关系分别如图4-5 所示。

图4 两种磁场噪声随温度变化曲线Fig.4 Two kinds of magnetic field noise V.S.the temperature
根据仿真结果,在相同条件下,热磁化噪声远小于Johnson 电流噪声,两种磁场噪声都随温度升高而增大,导致信噪比相应减小,因此在高温情况下优化磁屏蔽设计是提高核自旋磁矩探测性能的重点。
图5 磁强计信噪比随温度变化曲线Fig.5 Signal-to-noise ratio V.S.the temperature
2.1.3 技术噪声
技术噪声指来源于核磁共振陀螺仪中激光、磁场和闭环控制机构中的噪声,可以通过相应技术方案将其抑制,主要包括静磁场闭环控制噪声、激光频率与功率波动噪声等。
2.1.3.1 静磁场稳定控制噪声
静磁场稳定控制噪声指由于外界磁场变化或内部控制系统引入的静磁场输出量不稳定所引起的探测噪声,静磁场表示为B0+ΔB0,ΔB0为静磁场噪声。调制频率应取值为:

因此引入调制磁场的失谐量Δω,将其代入式(2)可得:

取p=1,M+实部改写为:

探测信号通过 cos(ωct)解调得到:

由式(17)可看出,静磁场闭环噪声会导致碱金属磁强计y轴方向探测结果耦合进x轴方向磁场,信噪比表示为:
x和y轴方向磁场大小比值By/Bx分别取0.1、1和10,仿真得到静磁场闭环噪声对碱金属磁强计信噪比的影响如图6 所示。
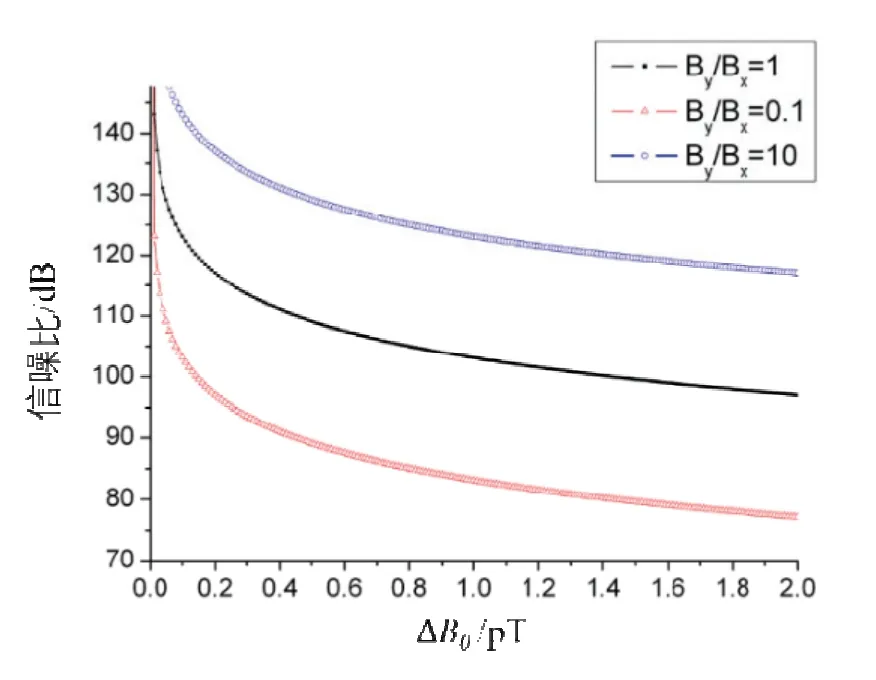
图6 静磁场闭环噪声与磁强计信噪比关系曲线Fig.6 Signal-to-noise ratio of magnetometer V.S.the noise of magnetic noise
根据仿真结果可得,当探测方向磁场强度大于或等于垂直方向耦合磁场强度时,静磁场噪声ΔB0控制在2 pT 以内,磁强计信噪比均优于100 dB;当探测方向磁场强度小于垂直方向耦合磁场强度时,pT 量级的静磁场噪声会严重影响信号信噪比。
2.1.3.2 泵浦光频率功率波动噪声
由式(8)(9)可得碱金属磁强计输出信号与z轴电子自旋磁矩Mz有关,Mz可表示为:

泵浦光频率和功率波动引起激光泵浦率ROP的变化,进一步造成碱金属原子极化率的改变,分别表示为:
其中,W为光功率,c为光速,re为电子半径,f为碱金属原子跃迁线振子强度,h为普朗克常数,v0为碱金属原子吸收频率,S为光斑面积,L(v)是谱线的洛伦兹展宽,表示为:

联合式(8)(19)-(22)可得,泵浦光频率和功率波动会产生碱金属磁强计探测的技术噪声ΔMz。假设碱金属原子弛豫率不变,激光频率和功率波动噪声引起的碱金属磁强计信噪比可表示为:


图7 磁强计信噪比与泵浦光频率波动关系曲线Fig.7 Signal-to-noise ratio of magnetometer V.S.the frequency fluctuation of pumped laser

图8 磁强计信噪比与泵浦光功率波动关系曲线Fig.8 Signal-to-noise ratio of magnetometer V.S.the power fluctuation of pumped laser
从结果可看出,碱金属磁强计信噪比随着泵浦光频率和功率波动的增大而减小,当泵浦光频率漂移控制在1 GHz 以内时,磁强计信噪比可达到较高水平,频率漂移大于1 GHz 时,信噪比迅速下降;当泵浦光功率波动控制在20 µW 以内时,磁强计信噪比可达到较高水平。在核磁共振陀螺中,控制泵浦光的频率和功率波动对提高内嵌碱金属磁强计信噪比有较大作用,激光稳频稳功率是提高陀螺性能的关键技术之一。
2.1.3.3 探测光频率功率波动噪声
由式(8)(9)可知获得信号的幅值与探测光中心频率和功率直接相关,其中探测光功率I0与磁强计所获得信号呈正比关系,因此假设探测光功率波动会产生碱金属磁强计探测的技术噪声ΔMzd,则探测光功率波动噪声引起的碱金属磁强计信噪比可表示为:

由探测光偏振面旋转角θ的表达式可知,检测光偏振面的旋转角θ与检测光频率近似呈色散曲线关系,即存在最佳探测光中心频率使偏转角最大,且最佳中心频率ν0为偏离D1 线1/2位置处,假设探测光中心频率波动δν为偏离最佳中心频率ν0的频率值,且其产生碱金属磁强计探测的技术噪声为ΔMzf,则探测光频率波动噪声引起的碱金属磁强计信噪比可表示为:

结合式(8)(9),可以得到探测光功率、频率噪声波动对信号信噪比的影响如图9 所示。
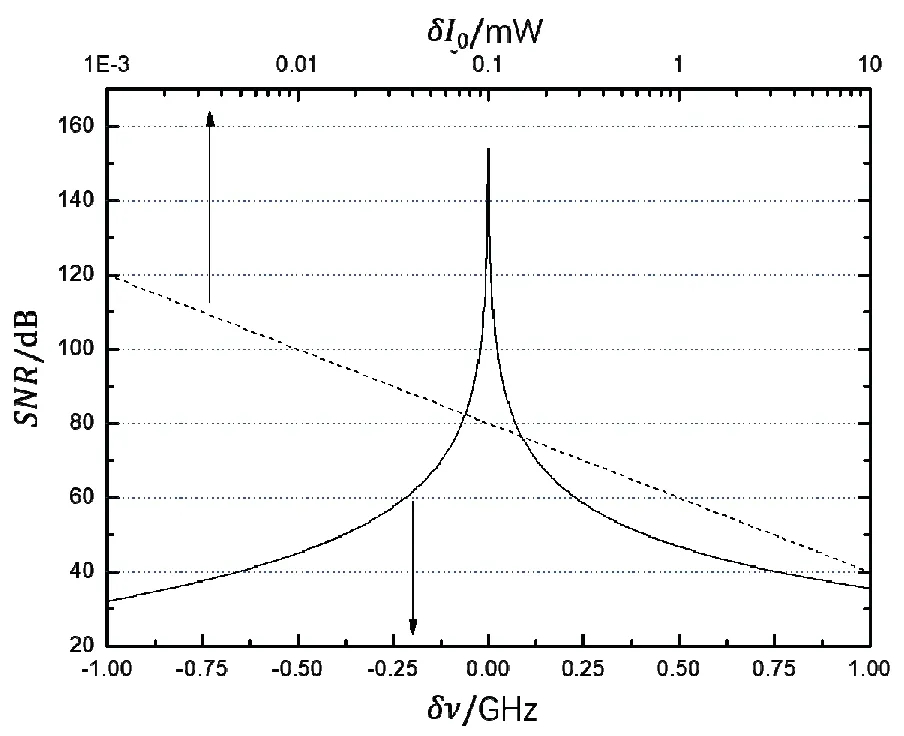
图9 探测光功率、频率噪声波动对信号信噪比的影响关系Fig.9 The influences of power and frequency fluctuation on the signal-to-noise of magnetometer
根据以上结果可看出,碱金属磁强计信噪比随着探测光频率和功率波动的增大而减小,若将信噪比保证在80 dB 以上,需将探测光频率抖动控制在0.1 GHz以内,功率波动控制在0.1 mW 以内。
2.2 磁测量相位误差
核磁共振陀螺中通过参量调制磁强计探测惰性气体原子核的进动磁矩信号,核磁矩沿Z 轴做进动,探测到的进动信号相位与陀螺零位相关,当待探测信号为核自旋进动信号时,Bx、By可分别写为:
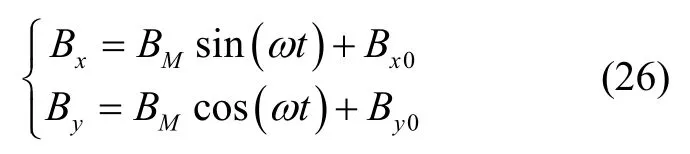
由式(26)可得,探测信号通过 cos(ωct)解调得到:

探测信号通过 sin(ωct)解调得到:

其中 sinδ=T2ΔωBM/。
从上述公式可以看出,当调制信号发生失谐后,输出信号会产生相位移动,且主要与失谐量、待测磁场幅度和电子弛豫时间相关。
如图10 所示,核自旋进动稳定的状态下,随着调制信号失谐量的增大,探测相位误差随之增大,同时相位误差随着碱金属横向弛豫时间的增长会对失谐量更加敏感。为了避免由调制频率失谐引入的测量误差,需采用闭环控制系统保证调制频率与Z 轴静磁场的精确匹配。

图10 调制频率失谐量对相位测量误差影响Fig.10 The influence of the detuning of modulation frequency on the error of phase
3 结论
本文详细讨论了核磁共振陀螺中参量调制磁强计对静态和动态磁场探测过程。通过理论建模和仿真实验,研究了误差产生机理,并进行了定量分析。基于量子噪声给出了实验室条件下碱金属磁力仪极限探测灵敏度约为百飞特量级。针对磁屏蔽特性引起的磁场噪声,分析得到陀螺工作状态下考虑磁场噪声,信号信噪比最大不超过约134 dB,磁场噪声对输出信号干扰较小,温度升高会加大磁场噪声的影响。针对技术噪声,分析了静磁场闭环噪声、泵浦及探测激光频率功率波动对输出信号的影响,计算结果表明静磁场闭环噪声可引入垂直磁场分量,控制该噪声在皮特量级可有效抑制干扰,泵浦光频率波动控制在1 GHz 以内,功率波动小于20 µW 可有效提高磁强计信噪比,对于探测光,信号信噪比对激光频率更为敏感,需将频率波动控制在0.1 GHz 以内。针对动态信号测量分析表明,调制信号的失谐会引入探测信号的相位延迟,且碱金属原子的横向弛豫时间越长,相位延迟越明显。
猜你喜欢
西北工业大学学报(2022年2期)2022-05-11 07:51:28
空间科学学报(2020年4期)2020-04-22 01:17:10
燕山大学学报(2020年1期)2020-03-12 10:01:08
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
传感器与微系统(2018年7期)2018-08-29 00:44:20
快乐语文(2018年36期)2018-03-12 00:56:02
中学化学(2015年5期)2015-07-13 07:41:41
中学化学(2015年5期)2015-07-13 07:36:59