
高低温环境角度标准装置的研制
2023-02-15 12:01:36郑莹洁胡佳成李东升乔凤斌
中国测试 2023年1期
郑莹洁,胡佳成,丁 鸿,李东升,朱 跃,乔凤斌
(1.中国计量大学,浙江 杭州 310018; 2.上海航天设备制造总厂有限公司,上海 200245)
0 引 言
近年来,我国在北斗卫星、探月工程等重大航空航天领域发展迅速,越来越多的空间精密机构需要在地面模拟高低温环境进行测试,其中,角位移量是决定转动运动机构动作是否精确执行的关键。高低温环境下精密机构的角位移量主要采用角度编码器[1-3]进行测量,为保证其测量的可靠性,需要对其进行定期测量与校准[4]。
目前国内外针对角度编码器的校准通常采用示波器法[5]、多面体棱镜法[6-8]、多齿分度台校准法[9]与高精度编码器对比法[10-15],其中航天工业北京长城计量测试技术研究所研制的简易精密小角度校准装置测量范围为±50′,分辨率为0.01″,但其对机械安装精度要求极高,且工作效率较低[16];德国海德汉公司设计的光电编码器细分误差角度比较仪器采用小角度光学测量原理[17],测量步距为0.001″,但该仪器对环境要求非常严格,实验装调精度高,不适合应用在工作现场。
然而,上述角度编码器校准装置均是在常温环境下测试的,无法实现角度编码器在高低温环境时的校准。其中,多面棱镜法与自准直仪法系统结构复杂,工作效率低;最高分辨率不能进行高速检测;时频域分析法精度易受光栅重复性影响;高精度编码器对比法操作简单,精度易受角度基准限制,但针对高低温环境较易实现。因此,本文借鉴了常温环境下利用对比检测法的角度校准装置,研制了一种高低温环境角度标准装置,用于校准高低温环境中的角度编码器,以保证综合性能测试仪中角度参量溯源的可靠性[18],并使用该装置对高低温环境条件下使用的角度编码器进行了试验验证[19]。
1 高低温环境角度标准装置研制
1.1 技术指标
高低温环境角度标准装置应满足以下条件:
1)测量范围:360°;
2)扩展不确定度:12″(k=2);
3)被测角度编码器温度范围:-35~95℃。
1.2 工作原理与结构设计
高低温环境角度标准装置的基本工作原理为:高低温环境角度标准装置的主轴与高低温环境下的被测角度编码器相连,并采用主轴作为机械传动部件,将处于高低温环境下的角位移量传递至常温环境,通过比较高低温环境角度标准装置的测量结果与高低温环境下被测角度编码器的测量结果,实现对高低温环境下被测角度编码器的校准。此外,高低温环境角度标准装置中的高精度角度编码器已送至中国计量科学研究院检定,并获取相应的校准证书,使高低温环境角度标准装置的测量结果可溯源至国家计量基准,建立完整溯源研究链。
如图1所示为高低温环境角度标准装置总体示意图,主要由伺服电机驱动部分、高低温环境中的被校角度编码器部分和常温环境中高精度角度编码器部分三部分构成。其中,高低温环境内部分主轴需要相应支撑,因此内部支撑设置轴承安装位置。校准装置由伺服电机驱动,带动主轴旋转,进而将角位移量传递至高精度角度编码器与被校角度编码器,通过比较两者示值实现校准。
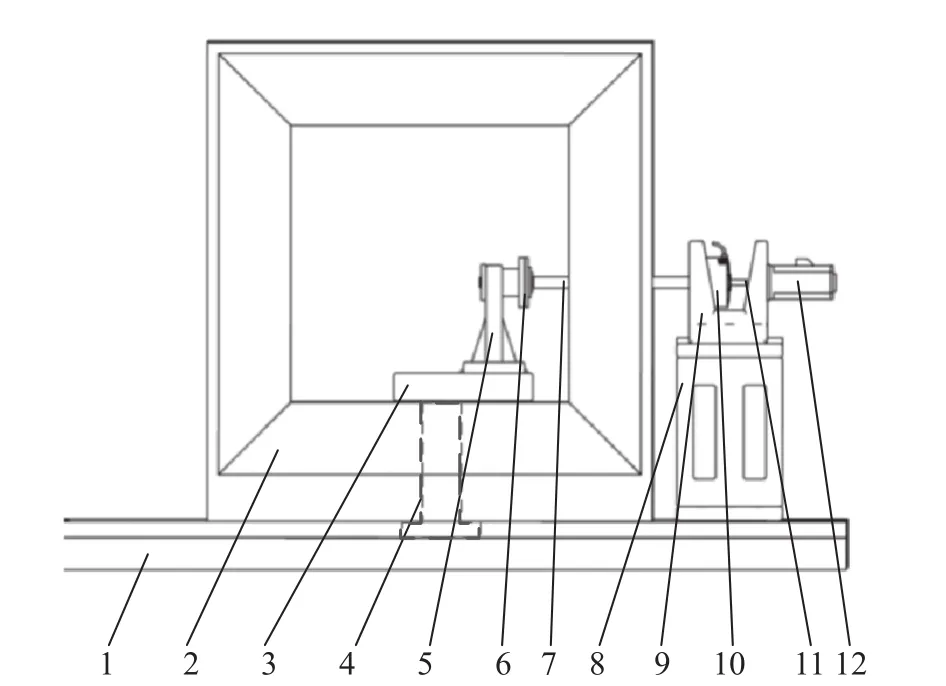
图1 高低温环境角度标准装置总体示意图
1.3 高低温环境影响分析
高低温环境对该装置主要存在以下几种影响:1)主轴的内部支撑受到温度影响后纵向高度变化,而温箱外的支撑处于常温环境下,不受温度影响,因此造成主轴倾斜,产生角不对中误差,严重时会损坏主轴;2) 主轴部分处于高低温环境,存在主轴轴向的热胀冷缩;3) 高低温环境下轴承与主轴、内部支撑受到温度的影响产生径向热胀冷缩,且三者的热膨胀系数不同,配合关系改变可能造成摩擦过大或者轴承卡死。因此需要对上述问题进行仿真计算,并为后续高低温环境角度标准装置选型提供一定理论依据。
1.3.1 内部支撑纵向热影响分析
内部支撑主要包括三部分,底柱、内部连接板和内部支撑件,为减小内部支撑热胀冷缩引入误差,三者拟采用同一种低热膨胀系数的材料。内部支撑中,底柱穿过高低温箱,存在热传导,即室温(20 ℃)到高低温箱温度,内部连接板与内部支撑件完全处于高低温箱内,以此为依据进行内部支撑仿真的边界条件与热通量设置。
通过COMSOL对内部支撑热膨胀仿真,在软件中设置材料为因瓦合金,添加固体力学场与固体传热场,并进行多物理场耦合。将高低温箱温度分别设置为95 ℃与-35 ℃,以立柱下表面为参考点,仿真得到95 ℃与-35 ℃内部支撑纵向热膨胀量。如图2为内部支撑仿真结果图。
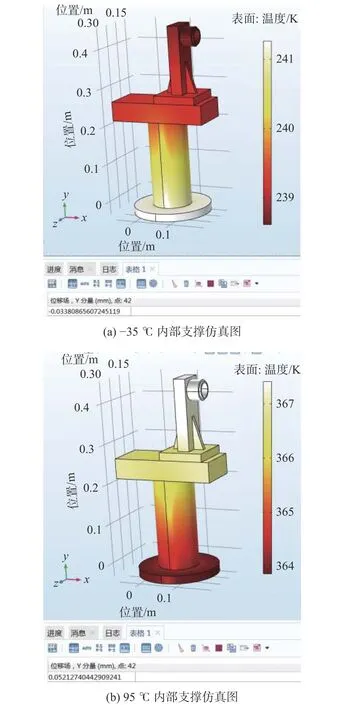
图2 内部支撑热膨胀仿真结果图
内部支撑以因瓦合金作为仿真计算的材料,经过COMSOL仿真,内部支撑最大热膨胀量为52.1 µm,因此在高低温环境角度标准装置中联轴器的选型中需要将考虑其允许偏心距离,内部支撑的材料选型时应考虑其热膨胀系数。
1.3.2 主轴轴向热影响分析
由于主轴需要将角位移量从高低温环境传递至常温环境下,因此主轴既存在高低温环境部分,又有常温环境部分,需要考虑热传导。在COMSOL软件中设置材料为低膨胀系数的因瓦合金,添加固体力学场与固体传热场,并将二者进行多物理场耦合。以主轴右端面为参考点,仿真得到主轴轴向热膨胀量。
如图3为高低温环境角度标准装置中主轴的仿真模型。
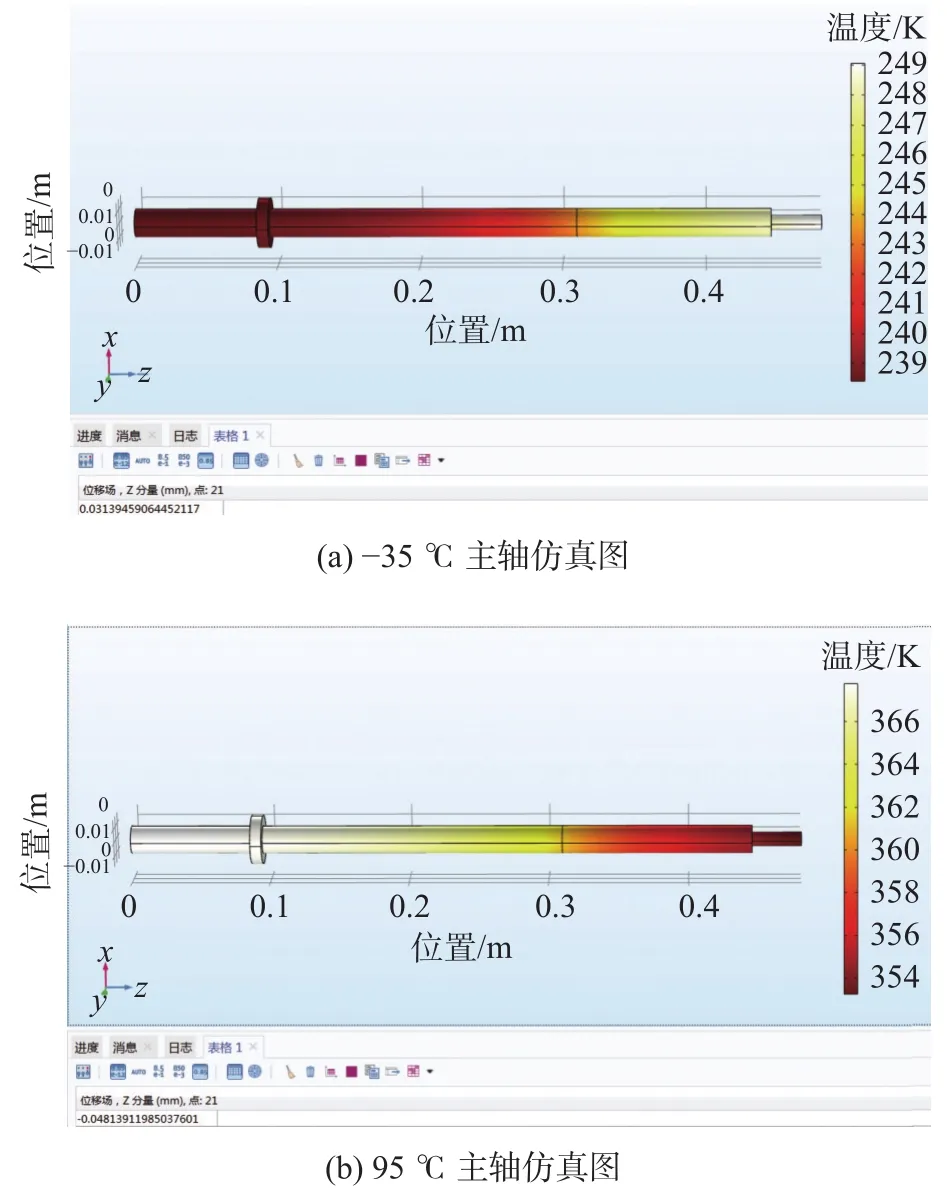
图3 主轴热膨胀仿真结果图
主轴以因瓦合金作为仿真计算的材料,经过COMSOL仿真,主轴最大热膨胀量为48.1 µm,因此在高低温环境角度标准装置中主轴材料的选型中需要将考虑其热膨胀系数。
1.3.3 轴承与主轴、内部支撑件径向热影响分析
在高低温箱内,由于轴承与主轴和内部支撑件的线膨胀度存在差异,高低温环境下由于热胀冷缩会对轴承配合及轴承游隙产生影响,下面对其进行相关计算。以高低温环境下角度校准装置中的主轴为例,轴承与主轴所处温度在从室温改变至极端温度时热膨胀量为:
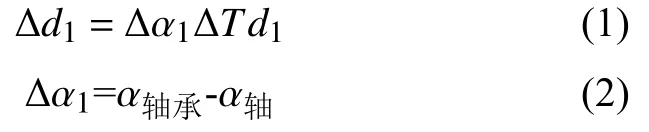
式中: Δd1——轴承和主轴的热膨胀量之差;
Δα1——轴承和主轴线膨胀系数之差;
ΔT——温度变化量;
d1——主轴轴径;
α轴承——轴承热膨胀系数;
α轴——主轴的线膨胀系数。
轴承与内部支撑件之间的温度从室温改变至极端温度时热膨胀量为:
式中: Δd2——轴承和内部支撑件热膨胀量之差;
Δα2——轴承和内部支撑件线膨胀系数之差;
d2——轴承外径;
α支撑——内部支撑件的线膨胀系数。
以上述计算分析作为参考,在高低温环境角度标准装置的轴承选型中需要对其材料进行考虑。
1.4 高低温环境角度标准装置部件选型
1.4.1 高精度角度编码器选型
根据装置设计,高精度角度编码器作为标准传感器工作于常温环境下,无特殊工作温度要求。如图4为选用的海德汉RCN2310角度编码器,精度为±5″,测角重复性为 0.4″,允许轴向窜动为±0.3 mm,摩擦扭矩为 3.3 N·m。

图4 海德汉角度编码器实物图
1.4.2 内部支撑及主轴材料选型
由于内部支撑与主轴需要在高低温环境下使用,因此需同时考虑材料的热膨胀系数与强度。经过筛选,选用因瓦合金4J36,该材料是一种具有超低膨胀系数的铁镍合金,其线膨胀系数为1.8×10-6/℃,为普通钢材的1/10,密度为8.10 g/cm3,抗拉强度为450 MPa,屈服强度为274 MPa。经过仿真,内部支撑纵向最大热膨胀量为52.1 µm,主轴的最大轴向热膨胀量为48.1 µm。
1.4.3 联轴器选型
根据上文对轴承与主轴、内部支撑径向热膨胀仿真计算与内部支撑材料选型,对装置中的联轴器进行选型。由于联轴器处于高低温箱外,因此联轴器不需要考虑耐温问题,但需考虑主轴受温度影响后是否会对联轴器产生影响,进一步影响高低温环境角度标准装置的测量精度。若选用弹性联轴器,可一定程度调节内部支撑纵向热膨胀引起的偏角,可吸收一定主轴热膨胀量,但会引起高精度角度编码器测量不准确;若选择刚性联轴器,则不能吸收偏角与偏心误差,但精度上有保证。而高低温环境角度标准装置中选用的高精度角度编码器自身可允许0.3 mm的轴向窜动,大于内部支撑纵向最大热膨胀量52.1 µm。因此,联轴器选用刚性联轴器,实物图如图5所示,其允许转矩为45 N·m,额定转速为3 000 r/min,转动惯量为 2.5×10-5kg·m2。

图5 联轴器实物图
1.4.4 轴承选型
由于轴承需要放置在高低温箱内,普通金属材料轴承受到温度影响产生热胀冷缩,可能会造成主轴卡死或主轴处于悬臂梁状态。陶瓷轴承热膨胀系数为0,不受温度影响,因此选用全陶瓷角接触轴承。角接触轴承一般适用于高精度旋转场合,且可以同时承受径向载荷与轴向载荷,陶瓷的具体材料选用氧化锆全陶瓷,精度等级选用现有最高等级P6级。将轴承与主轴的热膨胀系数带入式(1)、式(3),可得主轴与轴承之间最大热膨胀量为1.92 µm,在常用小间隙配合H7/g6间隙允许范围-7 ~ -2.9 µm内不会卡死,轴承与内部支撑之间最大热膨胀量为4.03 µm,在过渡配合范围0~16 µm内,能保证轴承与内部支撑之间既不会滚动,也不会损坏轴承。如图6为全陶瓷角接触轴承实物图。

图6 全陶瓷角接触轴承实物图
2 高低温环境角度标准装置不确定度评定
高精度角度标准装置的技术指标为扩展不确定度小于12″,为验证该标准装置的可行性,对该装置进行不确定度评定[20]。由于标准装置理论上不包含被测件,因此不确定度评定时被测件装配误差不纳入考虑,后续被校件功能测试时,被校角度编码器的装配采用关节臂对同轴度进行测量,保证被测角度编码器与主轴同轴度在装配要求内。如图7为高低温环境角度标准装置实物图。
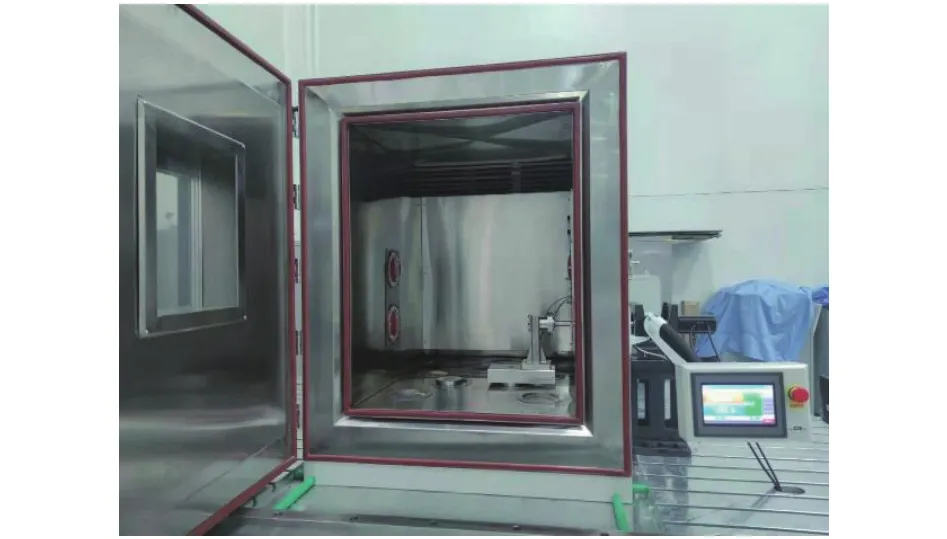
图7 高低温环境角度标准装置实物图
1)标准角度编码器自身分度引起的不确定度分量u1
由标准角度编码器的校准证书给出的分度误差±5″,其半宽为5″,则不确定度分量为

2)标准角度编码器安装偏心引起的不确定度分量u2
由第三方报告所知,标准角度编码器孔与主轴的同心度三次测量数据分别为0.056 mm、0.058 mm、0.076 mm,求平均可得同心度误差为0.063 mm。将其代入偏心误差计算可得

式中:e——偏心距离;
r——旋转半径;
θ——旋转角度。
由于偏心误差符合反正弦分布,则其不确定度分量为

3)整体装置的重复性引起的不确定度分量u3
由于整体装置的数据主要由标准角度编码器得到,因此标准角度编码器的重复性误差可认为与整体装置的重复性误差一致。由标准角度编码器的校准证书给出的重复性误差为0.4″,整体装置的重复性引入的不确定度分量按均匀分布,包含因子,则其不确定度分量为

因上述不确定度分量互不相关,可得角度标准装置的合成不确定度为

取扩展因子k=2,则标准装置扩展不确定度为:

因此,高低温环境角度标准装置的扩展不确定度为9.19″<12″,满足高低温环境角度标准装置的设计指标。该不确定度评定结果已经过苏州计量测试院第三方认证。
3 被校件功能测试
如表1~表3所示,选用工作温度范围较大的ZETTLEX角度编码器作为被校角度编码器,对其进行校准测试,如图8所示为被校角度编码器实物图。当其轴向间隙为0.75 mm至1.45 mm,同轴度误差在0.25 mm以内时,该角度编码器精度98″。被校角度编码器安装时,租赁关节臂服务对被校角度编码器同轴度进行测量。经过第三方测量并出具的报告,初始安装位置时,被校角度编码器同轴度误差三次测量结果为0.173 mm、0.083 mm、0.102 mm,求平均可得同轴度误差为0.119 mm,小于被校角度编码器同轴度安装要求最大误差;轴向间隙三次测量值为1.27 mm、1.28 mm、1.29 mm,求平均可得同轴度误差为0.119 mm,在安装范围0.75 mm至1.45 mm内,符合安装要求。将高低温箱分别设置为95 ℃、80 ℃、60 ℃、40 ℃、20 ℃、0 ℃、-20 ℃、-35 ℃,恒温等待4 h后,对被校角度编码器进行实验测试。此处只展示 95 ℃、20 ℃、-35 ℃ 数值。

图8 被校角度编码器实物图
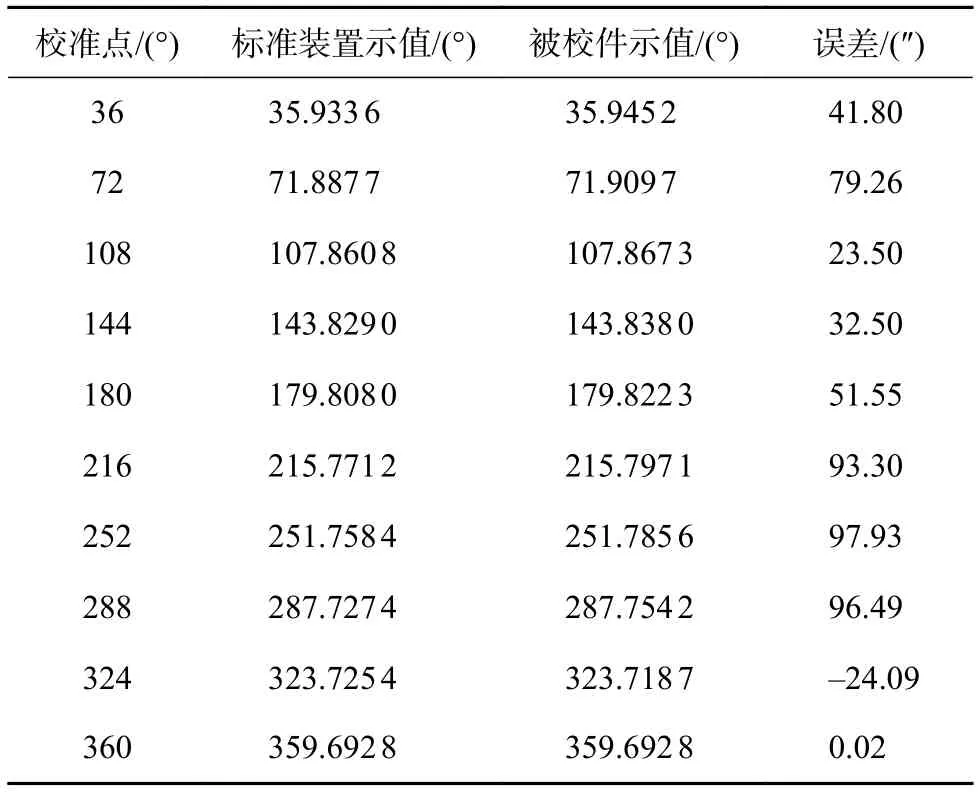
表1 -35 ℃被测角度编码器校准结果

表2 20 ℃被测角度编码器校准结果
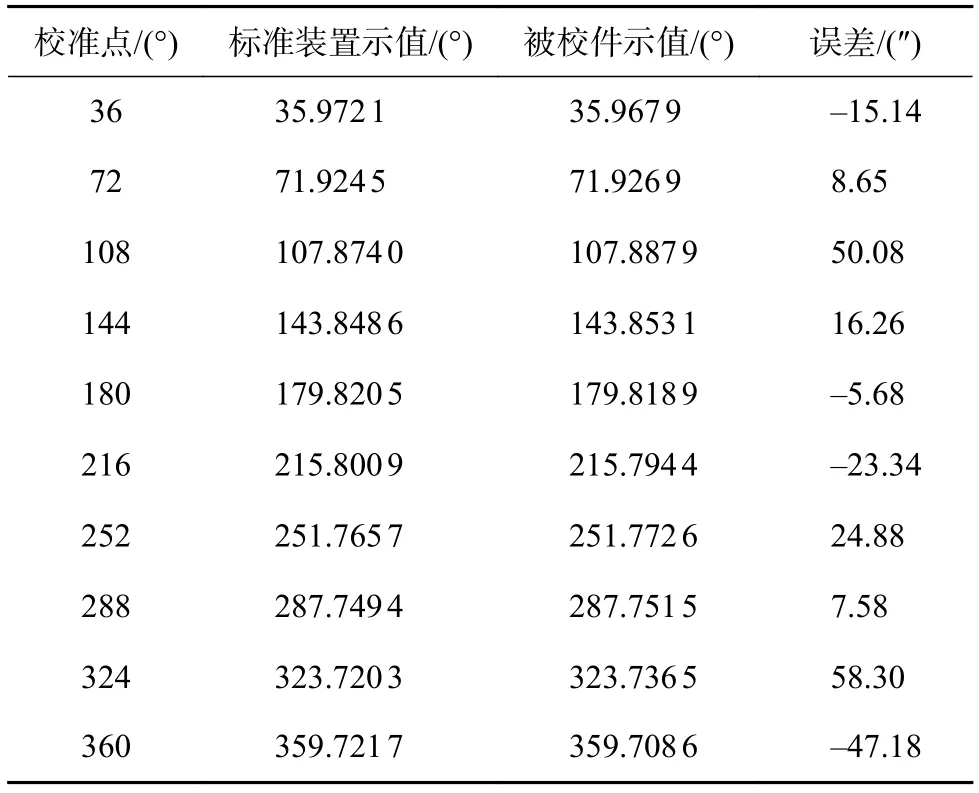
表3 95 ℃被测角度编码器校准结果
由上表可知,高低温环境角度标准装置对被校角度编码器进行测试后,各温度点误差数据最大值为97.93″,满足被校角度编码器自身精度指标98″,测试结果合格。
4 结束语
本文针对高低温环境角度标准装置的研制进行了装置设计与仿真分析,并进行了不确定度评定与被校件测试,重点考虑了温度对装置的影响,并对其进行适应性设计,一定程度上避免了温度引入的影响。经分析,该高低温环境角度标准装置的扩展不确定度为9.19″,满足本文提出的扩展不确定度小于12″的技术指标。同时进行了被校件测试,其最大偏差为97.93″,符合自身精度98″。本装置的研制一定程度上保证了高低温环境下角度编码器校准的可靠性。
猜你喜欢
石油沥青(2019年6期)2020-01-16 08:56:56
宇航计测技术(2019年4期)2019-08-31 07:58:38
铁道通信信号(2019年1期)2019-03-21 07:37:24
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
制造技术与机床(2017年9期)2017-11-27 02:13:56
制造技术与机床(2017年3期)2017-06-23 08:11:33
电子设计工程(2017年20期)2017-02-10 03:39:29
电子器件(2015年5期)2015-12-29 08:42:24
电源技术(2015年5期)2015-08-22 11:17:58
电子工业专用设备(2015年4期)2015-05-26 09:10:40
