
“自适应控制”原理下建造智能化认知与策略*
2023-02-13 09:34李坰其
南方建筑 2023年1期
孙 源,王 竹 ,郑 媛,李坰其
引言
在工业4.0 时代,建筑行业在工业化、数字化、智能化转型1)的道路上涌现出多样化的创新性研究成果和实践项目。“设计意图-生形-模拟-迭代-优化-建造”工作流拓深了人机共生情境下建构学的内涵,使得未来建筑师的职能和角色面临深远的机遇和挑战[1]。
目前,传统的建造模式下的生产效能、工艺流程、组织架构等方面已发展至较为成熟状态,然而距离有效应对大型工程项目的高要求建设仍存在一定距离。相较而言,当传统建造效能开发趋于稳定的同时,在计算机数字控制(Computer Numerical Control,CNC)技术推动下,建造工厂(Construction Factories,CFs)逐步发挥出精准、高效、集约的生产潜力[2](图1)。由此,世界各地的建筑师们开始牵头协调来自计算机科学、机器人、自动化等相关专业工种,逐步尝试将工业化的生产思维引入建筑设计建造过程中,重新获得了与材料及建造过程直接联系的可能性。从1970 年开始试行的建筑构件制造(Building Component Manufacturing,BCM),发展到大规模建筑模块预制(Large-Scale Prefabrication,LSP),再到20 世纪90 年代以来机器人开始参与建筑建造环节,以及当今的自动化机器人现场施工(Automated Robotic On-site Factories,A/ROFs),近半世纪以来取得了创新性进展[3]。

图1 建筑行业建造效能随时间发展的“S”形曲线模型
然而,建筑的智能化营建并非等同于由数控机械臂辅助、代替人力执行重复性建造行为的单流程生产线(Single-Task Construction Robots,STCRs),而是需要整合建筑概念设计和施工建造之间反馈循环的过程。数字孪生(Digital twins)技术链接虚拟环境和物理环境,并进行信息数据的交互,为设计建造流程提供了新范式[4]。自适应控制(Adaptive control)逐步应用于智能建构的目的和应用价值,在于强化机器人协助建筑师掌握材料性能,精确感知客观物理环境并主动应对建造过程未知情况。作为调节特定建造机能的“神经中枢”,采用自适应控制原理的建构框架在感知系统、驱动系统和人机交互系统的协同配合下,得以实现对于复杂设计意图、建构工艺和施工环境的适应能力。其突破了以标准化和黑箱2)的方式封装在软件程序里的生产智能,是智能建造领域面向设计师的互动开放式策略之一。对此,密歇根大学(University of Michigan)、苏黎世联邦理工大学(ETH Zurich)、斯图加特大学(University of Stuttgart)、伦敦大学学院(UCL)等相关高校的建筑研究团队陆续开展了关于自适应建造的探索性案例[5]。以往研究主要以三方面的设计需求和营建实践为导向:其一,在适应非常规性设计方案和建造工序方面,探索了在纤维编织结构[6]、网壳结构[7]、张拉膜结构[8]、石膏喷涂面层[9]等非线性三维空间造型的建构过程中,由建造机器人自主定位、找形并执行动作的潜力。其二,在适应施工环境的限制与干扰方面,着重于增强建造机器人的集成传感能力[10],以高精度的视觉、力矩等机器感应设备来模拟感知真实作业场景。其三,在适应建造材料的特定性能和应变行为,进行了胶合木材[11]、石材[12]、钢材[13]、生物复合材料(Bio-based composite)[14]等多样材料行为测试实验以训练机器学习能力。总体而言,尽管自适应控制原理在机器人和计算机等学科已有实质性的发展和应用,但拓展到建筑设计领域和智能建造场景中仍处于起步阶段[15],亟待更多概念拓深和研究实践涌现。
1 自适应视角下的建筑智能化设计建造背景
在系统论的理论框架下,建筑的建造过程是涉及形态美学、结构力学、材料学和构造工程学等多学科交叉的复杂系统。建筑的一般建造流程包括从原材料生产加工到单元构件制造,再到大规模的施工作业。在不连续的工序轮转过程中,材料性能偏差、构件加工公差和施工环境扰动等因素往往导致了建造误差不断积累,使得最终的实际建成效果和工艺精度偏离了设计预期(图2)。同时,复杂建造场景下施工难度和成本攀升,也在一定程度上限制了设计意图的表达和转译。因此,传统“立模放样”式的设计建造流程存在一定的局限性,较难满足未来多元发展的需求。

图2 建筑一般建造流程与误差积累过程
自适应的设计建造理念摆脱了静态、预设的工厂模式,进而将建筑设计与智能化建造融为一体。其通过自主监测建造过程、计算并执行建造动作,在把控建造精度和应对建筑现场环境、建筑材料行为相关的不确定性方面体现出明显优势[16]。作为一种由外部刺激驱动的响应机制,在监控建造对象及其动态环境的过程中,通过不断修改计算机控制器(Controller)的参数和系统模型,以达到应对建造流程中所出现各类动态变化要素的目的[17](图3)。其中,参数调节(Parameter adjustment)作为自适应控制系统的关键一环,依赖于建筑师对于传感系统(Sensing)、判定机制(Identification)和反馈流程(Feedback)的设计[18],并通过人机交互接口(Human-Machine Interaction)[19]有针对性地捕获、控制影响建造的关键因子,进而生成连续的建造信息流,以实现对于控制器和被控系统(Controlled system)的修正。从表象上来看,建造过程可以由机器人独立进行,建筑师的角色看似被弱化甚至替代了,实则被重新纳入了生物、社会和计算相结合的自适应生态(Adaptive ecology)中[20]。

图3 自适应控制系统方框图
2 自适应控制原理下的建造机器人应用解析
2.1 建筑构件制造环节的精度把控
对于自适应原理在智能建造应用潜力的探索,可追溯至密歇根大学建筑与城市规划学院(the A.Alfred Taubman College of Architecture and Urban Planning,University of Michigan)自2009 年起进行面向设计者开放的制造研究中[21]。区别于成品化的工厂生产定制模式,该项目允许设计者借助机械臂在室温下对钢棒进行弯曲、切割、定位,最终焊接成为复杂形态的钢构工艺品。研究者针对钢棒受力回弹等形变问题,通过引入计算机视觉系统(Computer vision system)作为传感器(Sensor),将加工后的构件信息通过扫描反馈至计算机进行形态比对,使得冷弯钢棒零件在“加工-扫描-校正-再加工……”重复循环的自动化工艺下,最终实现设计者的设计意图(图4)。

图4 冷弯钢棒构件加工过程的自适应控制信息链
整个自适应过程可以解析为几何分析(Geometry analysis)、精度控制(Accurate behaviour) 和形态塑造(Shaping behavior) 三部分。在三维建模软件Rhino 中,设计者以python 编程语言完成算法模块 “Super Matter Tools”的开发和程序设计,用于响应来自激光扫描传感器的数据信号。当构件的形态、位置等要素的实际偏差(Deviation)大于设计者提前预设的理想公差(Tolerance)时,计算系统自动执行数字模型更新和实物校正的指令,自主补偿钢棒受弯回弹和其他形变导致的造型加工误差,直至成品精度达到设定范围内。
由此延伸到建筑尺度的构件制造过程中,机械臂所携带的视觉传感器实时扫描建筑物的实体特征(Fabrication survey)并反馈给计算机,用于比较建成物与数字模型的几何匹配程度。作为建造中间过程的建造精度反馈(Accuracy feedback)环节,设计者在计算系统中预设算法,用于接收来自激光测距传感器(Laser rangefinding sensor)等目前常用的视觉传感设备所反馈的建成模型信息,进而计算并调整下一轮建构周期中单元构件的精确位置。这种根据实际情况动态感知、计算和修正的建造过程控制思路,目的在于确保误差不会在持续进行的建造过程中积累,以及进一步实施误差补偿(Error compensation)的可能性。
如上实验性探索研究中,自适应机器人执行程序(Robot execution program)代替人力建造动作,计算机视觉代替人眼直接观测和定位,适应性算法模块(Adaptive program)代替人脑判断和计算误差修正……开拓性地为应对建筑建造过程中的施工精度问题提供自动化修正策略,并且实现了建筑师直接参与自设计至建造的融贯过程。设计者的关注重心进而从生产行为转移到了对于建造系统的整体把控上,通过“误差预设-自主介入-实时修正”的模式,在数字化监督和信息反馈的工作流程中发挥出人机互动的参与性作用。
2.2 现场施工环节的动态环境响应
受制于地形、气候等环境因子、机器人设备机动性能和施工空间条件,目前的智能建造大多采用建筑构件异地预制的策略,即在机器人工厂中生产建筑构件后运送至实地后搭建的预制模式(Off-site Prefabrication)。而自适应控制下的建造机器人强化了对于反馈数据进行有针对性的选择,从加工对象的关注衍生到了对作业环境信息的捕捉,使环境意识得以在建筑设计阶段纳入考量。瑞士苏黎世联邦理工大学数字化建造实验室(Digital Fabrication Lab,ETH Zurich)自2005 年以来持续探索建造机器人直接应用于工地取材并现场建造模式(Insitufabrication),以回应在地营建、本土用材和环境适应(Environmental adaptation)等与建筑本体相关的议题。从实验室中应用于非标准砖墙的机械臂固定单轨线性轴线移动环境,到如今实现施工现场独立建造的可移动模式[22],机器人的灵活性、自主性和抗环境因子干扰能力不断提升(图5)。

图5 苏黎世联邦理工大学关于现场建造机器人的实验研究
由于固定位置或移动轨迹的建造机器人作业范围有限,通常仅限于应对小尺度构件的建造。相比之下,移动机器人更能适应不同场地特点、不断变化的施工环境。为了满足特定施工条件约束下达到毫米级的高精度建造场景的要求(例如非线性空间曲面的构造节点),机器人需要具备自我定位、规划和控制的能力[23]。ETH 团队研发的第一代IF 机器人(In-situ Fabricator,IF)由ABB IRB 4600 机械臂、履带式移动底盘和机载计算机组成,硬件内嵌入传感系统、操作控制系统和计算系统等和设计建造相关联的核心模块。高度集成化的机器人在施工场地中可以自主进行位置识别、动作执行以及建造精度校准等任务[24](图6)。
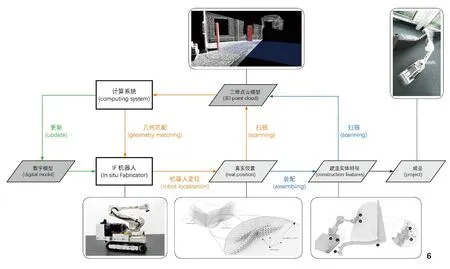
图6 IF 机器人的自主定位与建造精度反馈
以波形砖墙(Undulating brick wall)项目为例,工程要求在限高2.8m 的不平整建设场地限制下完成12m 的钢筋网格智能建造。在建造开始前,IF 首先扫描获取工作环境的三维点云数据(3D Point cloud),用于判定机器人自身在工作环境中的真实位置和可施工条件(层高、移动范围、障碍物等)。当其完成全局定位后,通过自适应移动路径规划(Adaptive path planning)计算出当前施工环境限制下最少移动次数,以减少重复工序。伴随着机器人的移动,其重新进行环境扫描并自主定位,确保计算系统能够同步掌握机器人的位置信息(Robot localization)。这种以建造现场为坐标参考系的工作环境感知(Workplace Identification),使得建筑师无需花费额外时间将真实场地具体情况转换为数字场地模型,规避了传统建造中施工现场的实际尺寸与建筑平面图的理想尺寸存在偏差的情况。此外,在建造的过程中,原位机器人可以实时监测场景信息,反馈给计算系统用于偏差比对和修正,进而得以实现应对当前营建中存在的无法周全预测和精准模拟的环境变化、材料形变等难点。据该团队近期建成的DFAB HOUSE 住房项目测算,曲面混凝土墙(图7)的98%的单元构件定位误差控制在2cm精度范围内[25]。

图7 DFAB HOUSE 住宅的Mesh Mould 墙(2019 年)
2.3 基于机器学习的建筑材料适应与应变预测
此外,智能化建造的前沿研究不止步于对于建筑形体的几何精确度把控和复杂空间营建策略探索,而在建筑材料行为(Material behavior)预测和建造工艺模拟等方面进一步拓宽边界。虽然包括钢、砖、混凝土等常规建筑材料在内的性能测试、力学分析等研究已有广泛的数理公式和模型支撑,然而不足以应对多元、动态变化的建造场景中材料未知的行为表现(如各向异性的复合材料、非均匀结构的天然材料等)。2000 年,Dunston Phillip 等人以钢筋为研究对象,首次提出围绕材料行为预测的自适应方案[26]。其突破经典力学模型和数理计算,进一步引入机器学习(Machine Learning,ML)中的神经网络(Neural Networks,NNs)训练方法,赋予计算机在没有明确编程情况下预测钢筋受弯回弹行为的能力。
通过对于材料性能的准确掌控也反作用于优化设计思路和创作概念。2017 年,在丹麦皇家建筑学院信息技术与建筑中心(CITA,KADK)主持的“A Bridge Too Far”项目中[27],运用机器学习的方法在建筑构件制造和设计之间建立一个反馈回路,采取的主要策略是通过收集材料加工过程中的数据并用于神经网络训练,以预测薄金属板构件在机械力作用下渐进成形的场景[28]。前期的机器学习阶段在50mm×50mm 金属板上进行局部加工的方式,其中运动捕捉相机、力-扭矩传感器、惯性测量仪等高度响应的传感设备记录了金属材料受力后的行为参数,3D 摄影测量仪记录了成型后金属构件的长度、深度、宽度等几何形状参数特征。接着采用自组织映射(Self-Organizing Maps,SOMs)的方式,将输入的高维数据转换到低维空间,使得设计者可以在二维图像(10dpi×10dpi)中探索参数组合的解决方案[29]。这种被编码的二维高度场图像作为一种可视化的加工模拟工具,辅助设计者预知并评估设计方案的几何形状特征与金属板材料行为之间的关系,进而作为在设计初始阶段的考虑依据之一。当神经网络模型生成的模拟结果用于设计优化后,确保了金属板的制造过程简化且精度可控(图8、9)。

图8 针对金属材料行为预测的机器学习流程

图9 “A Bridge Too Far”项目(2017 年)
和基于“传感-反馈-交互”系统的在线感知策略相比,机器学习的离线预测策略要求在动工之前建立预测模型,将自适应控制转移到以预测模拟代替建筑工程建造的实际情况,有效减少用于精度控制的时间成本和庞杂的偏差补偿方法设定。同时,经过训练的人工神经网络可以转移、重复使用和扩展,使得制造过程中和材料、加工工艺相关的数据在创建、共享和改进中不断优化迭代。近期的研究进展还有建筑师Brugnaro Giuliodeng 于2020 年发表的胶合木减材制造(Subtractive fabrication)机器学习成果[30]、建筑师Mette Ramsgaard Thomsen团队自2021 年以来对于生物基发光建筑材料的观测[31]等。可以设想,当研究者们将数据集和训练模型积累到一定程度后,实现更大尺度和复杂规模的建筑设计优化和建造模拟预测将成为可能。
3 思考与辨析:自适应建造模式的局限性与应用前景
以下从繁复性、连续性、安全性等角度探讨自适应控制下智能化建造模式中存在的局限性和潜在风险。
(1)繁复性。图10 为已有相关研究比较了建造机器人在默认模式(Default mode)3)、自适应模式(Adaptive mode)、实时模式(Real-time mode)4)和迭代模式(Iterative mode)5)等四种人机交互建造场景中的数据流强度。由于自适应建造模式依赖于来自真实世界的数据持续反馈,进而驱动建造机器人的自主计算和决策,这导致建造过程中生成、传输和交换的数据量成倍增加[32]。考虑到大型数据集的计算时间、存储空间和传输成本等问题,设计者往往需要在系统控制流程和预期目标的平衡下找到更加现实可行的方案。

图10 不同机器人建造模式的数据流比较
(2)连续性。在一个完整闭环“设计-响应-建造-感知”自适应控制流程介入下,连续的建造过程往往被设计者划分为若干循环执行的动作周期。例如图11 所示意的一个以单线程反馈(Single threaded feedback)的建造周期中[33],当计算系统正在感知建筑构件的几何信息、机器人位置信息和三维工作环境时,机器人所执行的建造动作被中止,直至重新接收计算机发出新的代码命令。从时间维度考虑,多环节并行能缩短工期,相应地对于机器人建造的实时性提出更高要求。

图11 一个自适应建造周期的流程图
(3)安全性。虽然自适应控制作为智能化建造基础架构的组织原理之一,在建筑领域已进行若干实践验证,但这并非表明其适用于所有类型的建造场景。因为在动态变化的建造场景中,控制系统自动生成的代码若在未经工作人员测试的情况下执行,可能违反相关的安全协议。特别是在人机合作的工作模式下,建造工具的自主性可能带来未知风险[34]。
自适应建造的优势和局限性并存,应当看到在多环节、多流程的建造系统中,局部环节中的技术选择和策略设定对全局产生不同程度的影响。面对计算机科学和机器人领域的各类研究成果,如何将其有效转化应用于建筑领域,使其整合成为建筑师主导下的设计建造辅助工具,对建筑师的系统控制思维和全局意识提出进阶要求。以传感技术为例,当双相机法、激光测距法和多维点云扫描法(Multi-dimensional point-cloud scanning)均已在智能建造过程中实现了计算机视觉的作用时,需要设计者在不同建造方案之间进行比对和筛选,找到全局最优导向下的实施方案。在特定情况下,与其获得详尽的三维模型数据,不如采用一种更抽象、更有效的策略(如二维静态图片、距离参数等)来获得必要反馈更高效。
结语
如果把建筑比作具有适应和进化潜力的有机体,其应具备自我感知(Self-awareness)、自我构建(Selfstructure)和自我组合(Self-assembly)的能力[35]。自适应策略在传统设计建造逻辑之外,重新思考和设定建筑设计和制造过程之间的顺序和流程[36],通过引入感知、反馈、计算和学习等环节,不仅提供了实现建筑尺度精确建造的一种可行策略,同时使建筑师重新回归到双向、对话的建造关系中。在集成建造场景信息、数字模型信息和建筑实体信息的系统工程中,通过理解其深层次工作原理和运行机制,进而使之有效转化为辅助建筑设计、预判建构场景、主导建造环节的高效工具。
在建筑学与计算机科学交叉领域,数字技术触发了对于建筑思维、设计和建造方式的深刻改变。跨学科专业知识融合的发展前景下,建构研究的复杂性和难度不断增加。已有创造性实践折射出建筑师们对于设计建造的把控能力不断提升,展现了面向未来建筑设计建造新图景。
图、表来源
图1:作者基于参考文献[2]、[3]的信息进行整理绘制;
图2:作者绘制;
图3:作者基于参考文献[8]的信息进行整理绘制;
图4:作者基于参考文献[21]的信息进行整理绘制;
图5:作者基于参考文献[22-24]的信息进行整理绘制;
图6:作者基于参考文献[25]的信息进行整理绘制;
图7:ETH Zurich 官网,https://ethz.ch/de/news-undveranstaltungen/eth-news/news/2019/02/mm-eroeffnungdfab-house.html;
图8:作者基于参考文献[27,28]的信息进行整理绘制;
图9:参考文献[28];
图10:作者基于参考文献[32]的信息进行整理绘制;
图11:作者基于参考文献[33]的信息进行整理绘制。
注释
1)详见2020年7月28日住建部等13部门联合印发的《关于推动智能建造与建筑工业化协同发展的指导意见》https://www.mohurd.gov.cn/gongkai/fdzdgknr/tzgg/202007/20200728_246537.html,以及住建部办公厅于2021 年2 月19 日《关于同意开展智能建造试点的函》https://www.mohurd.gov.cn/gongkai/fdzdgknr/tzgg/202102/20210209_249117.html.
2)“黑箱”作为一种隐喻,借指外界无法了解内部状态和运行逻辑的系统。
3)默认模式指机器人执行建造指令的基本模式;当指令发生改变后,机器人停止执行本次指令,即时执行新指令。
4)实时模式指机器人收到新指令后仍会执行一段时间缓冲区内原指令预设动作,再执行新指令。
5)迭代模式指机器人在执行指令的过程中根据外部信号自主调整数据,直到本次指令结束。
猜你喜欢
北方建筑(2021年6期)2021-12-31
文苑(2020年10期)2020-11-07
现代装饰(2020年6期)2020-06-22
国际木业(2016年8期)2017-01-15
国际木业(2016年12期)2016-12-21
国际木业(2016年3期)2016-12-01
国际木业(2016年1期)2016-12-01
少儿科学周刊·儿童版(2015年6期)2015-11-24
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
