
基于改进分层可拓理论的智能汽车AFS/DYC协调控制*
2023-02-13 01:37:58徐璞磊蔡英凤廉玉波孙晓强钟益林
汽车工程 2023年1期
徐璞磊,蔡英凤,廉玉波,孙晓强,王 海,陈 龙,钟益林
(1.江苏大学汽车工程研究院,镇江 212000;2.比亚迪汽车工业有限公司,深圳 518118;3.江苏大学汽车与交通工程学院,镇江 212000)
前言
智能化是全球汽车产业发展的主要方向之一,正成为世界各工业强国的战略竞争高地。在智能汽车环境感知、决策规划和控制执行这三大关键技术中,稳定的轨迹跟踪控制是保障行车安全性的重要前提,紧急避障及大曲率工况下底盘子系统的协调控制是研究难点。
常见的汽车底盘稳定性控制系统包括主动前轮转向系统(AFS)、直接横摆力矩控制系统(DYC)以及电子稳定控制系统(ESC)等。AFS 主要通过给前轮施加附加转角从而对前轮转角进行修正,在不对车辆行驶状态进行过多干预的情况下进行稳定性控制。DYC 主要通过给4 个车轮施加制动力或者是驱动力来为失稳的车辆提供附加横摆力矩,帮助失稳车辆重新调节横摆运动保证车辆的稳定性。尽管AFS 和DYC 都能有效改善车辆稳定性,但是均存在一定的局限性,主要体现在:当车轮处于非线性区域时,AFS对车辆的稳定性控制容易失效;DYC 在对车轮制动力与驱动力调节时,容易对车辆速度跟踪产生不利影响;由于各个底盘子系统的控制目标不同,系统间会存在一定的冲突和干扰。因此,需要针对底盘子系统的特点制定协调控制策略,同时,随着汽车智能化等级的提升,对底盘智能子系统协调控制的性能要求也更高。
目前AFS/DYC 协调控制系统的常用方法主要有:逻辑切换[1-3]、模糊控制[4-6]、鲁棒控制[7-8]、比例积分控制[9]、多智能体[10]、模型预测控制[11]等。上述协调控制方法大多基于车辆自身状态制定协调策略,忽略了外界因素对车辆稳定控制的影响。我国学者提出的可拓理论是处理矛盾问题的有效方法,在众多领域得到广泛应用。在车辆控制方面,研究者建立了基于可拓切换控制方法的智能车辆车道保持系统[12]、基于可拓优度评价的智能汽车横向轨迹跟踪控制方法[13]、基于可拓博弈的智能汽车轨迹跟踪协调控制方法[14]、自动驾驶汽车横向可拓预瞄切换控制系统[15]以及自动驾驶汽车高速超车轨迹跟踪协调控制系统[16]等。相关研究验证了该理论在消除冲突、协调矛盾方面的潜力和价值。应用可拓理论的关键环节之一,在于对经典域、可拓域和非域的有效划分,现有边界值大多基于多次仿真试验确定,计算过程较为繁琐,并且无法保证获得最优解,从而影响了可拓理论的控制效果。
针对上述问题,本文提出了改进分层可拓理论的分布式驱动汽车AFS/DYC 协调控制系统。通过分层可拓理论将路径规划得到的路径曲率与AFS 和DYC 的协调控制相结合;引入鲸鱼算法解决经典域、可拓域和非域的最优划分难题,该算法迭代速度快、不易陷入局部最优解。改进的智能汽车AFS/DYC 分层可拓协调控制系统能够在紧急避障、双移线等复杂工况下实现稳定的轨迹跟踪控制。
1 车辆动力学和轮胎模型
通过建立2 自由度车辆动力学模型、轮胎模型以及7 自由度车辆动力学模型作为控制器设计和仿真试验的参考模型。
1.1 2自由度车辆动力学模型
采用2 自由度车辆动力学模型作为控制器中的参考模型,根据分布式驱动汽车的特点,同时考虑转矩分配对纵向车速的影响,建立考虑车辆侧向、横摆两个自由度的车辆模型(图1):
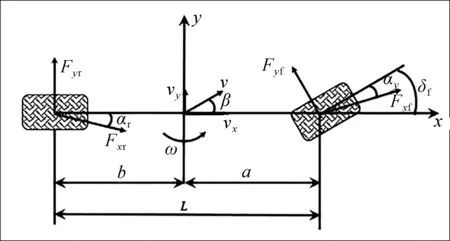
图1 2自由度车辆动力学模型
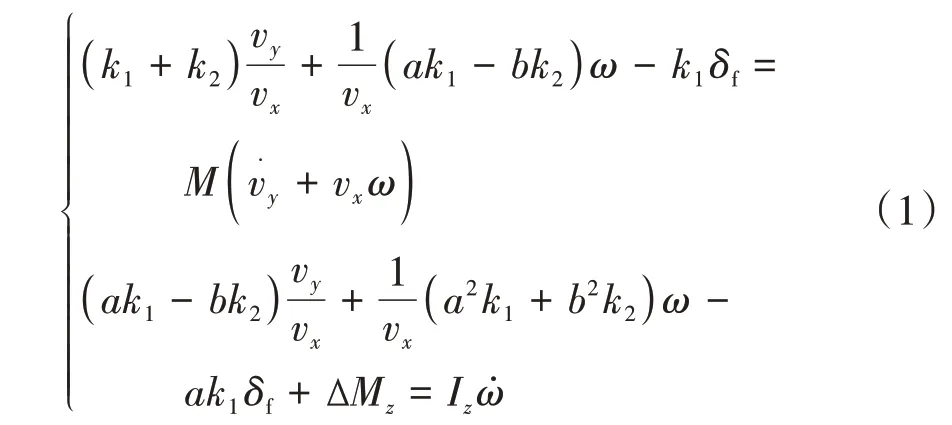
式中:M为车辆质量;vx为车辆的纵向速度;vy为车辆的横向速度;ω为车辆的横摆角速度;a、b分别为车辆前后轴与质心之间的距离;Iz为车辆绕z轴的转动惯量;ΔMz为由车轮纵向力产生的附加横摆力矩;k1和k2分别为前后轮的侧偏刚度;δf为前轮转角。
1.2 魔术公式轮胎模型
建立魔术公式轮胎模型[17]:
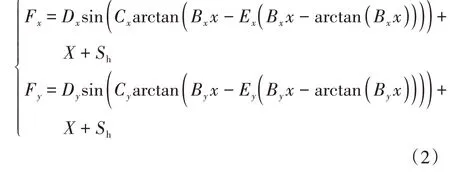
式中:X为侧偏角或纵向滑移率;Fi为侧向力、纵向力或回正力矩;D为峰值因子;B为刚度因子;E为曲线曲率因子;C为曲线形状因子;Sh为曲线水平方向漂移。
轮胎前后轴垂向力可以表示为
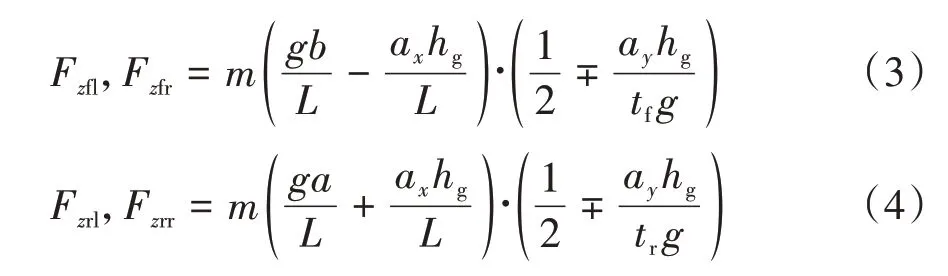
式中:hg为质心高度;L为轴距。
1.3 7自由度车辆动力学模型
考虑到车轮的纵向力,建立7 自由度车辆动力学模型,其中7 自由度包含以x轴为方向的纵向运动、以y轴为方向的横向运动、围绕z轴转动的横摆运动外加4 个车轮绕z轴的转动的自由度,如图2所示。
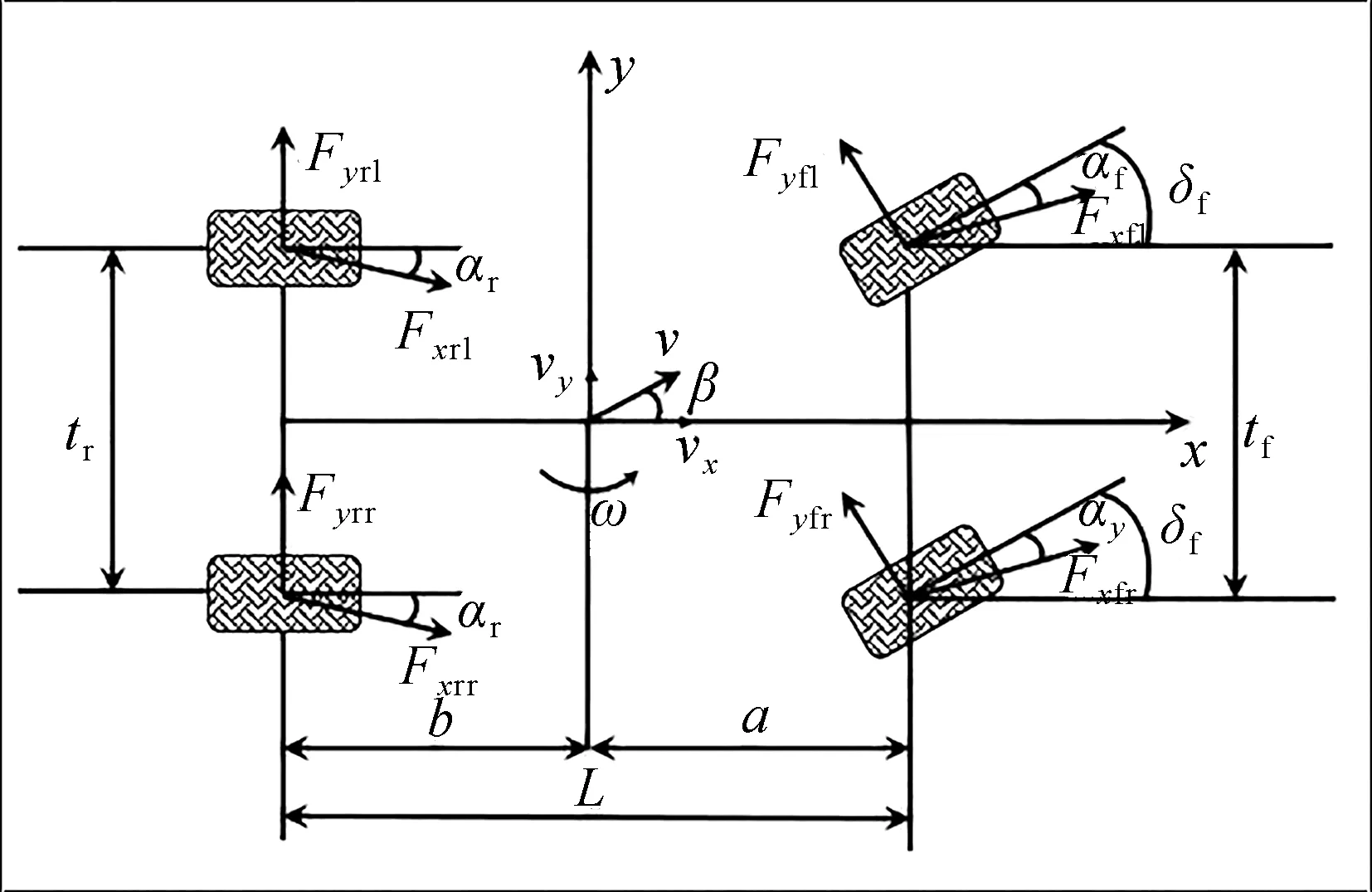
图2 7自由度车辆动力学模型
沿坐标轴x轴纵向方向的力平衡方程为

沿坐标轴y轴横向方向的力平衡方程为
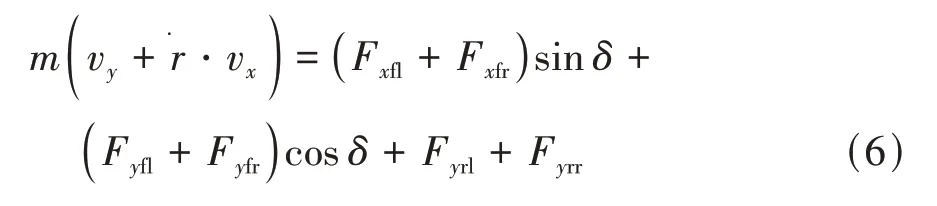
绕z轴横摆运动方程为
式中:m为车轮质量;δ为前轮转角;vx和vy分别为纵向和横向车速;a和b分别为车辆质心到前轴与后轴的距离;tf和tr分别为前轴和后轴轮距;ω为横摆角速度;Iz为车辆绕z轴的转动惯量;角标fl、fr、rl、rr 分别表示车辆的左前、右前、左后、右后4 个车轮的位置;ΔM为车辆的附加横摆力矩。
2 上层改进分层可拓协调模块
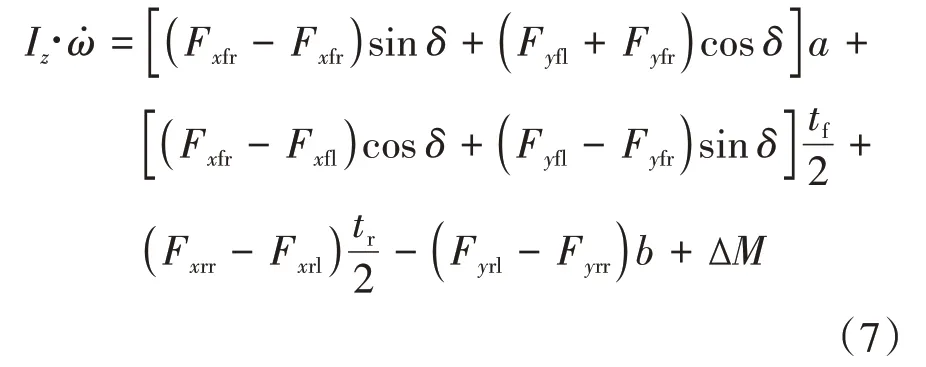
上层分层可拓协调模块结构如图3 所示。其中:ρ和˙分别为路径曲率和曲率的变化率;Eω和分别为车辆的横摆角速度与期望值的误差和误差变化率;和分别为车辆的纵向车速与期望值的误差和误差变化率。
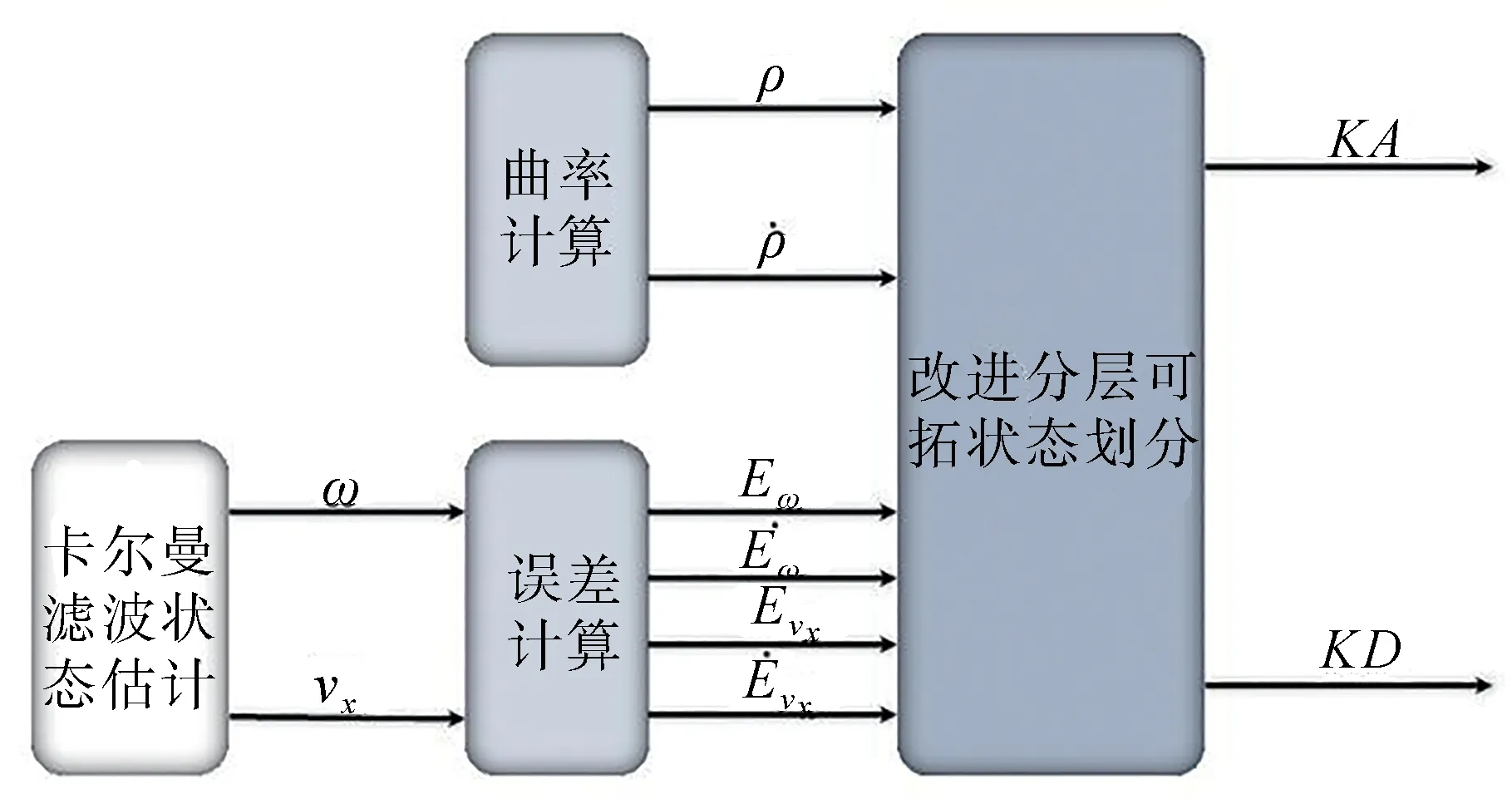
图3 改进分层可拓协调模块
改进分层可拓状态划分块结构如图4 所示,首先根据路径曲率和曲率变化率通过可拓控制架构1模块进行初步的状态划分,并初步确定AFS 和DYC的权重系数,然后再根据车辆横摆角速度与期望值的误差和误差变化率通过可拓控制架构2 模块得到DYC 的权重系数,同时根据车辆纵向车速与期望值的误差和误差变化率通过可拓控制架构3 模块得到AFS 的权重系数。同时在可拓理论[18]的边界确定过程中,通过引入鲸鱼算法得到3 个可拓控制架构模块的最优边界值。
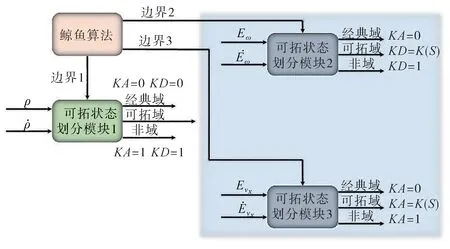
图4 改进分层可拓状态划分结构图
2.1 可拓状态划分
由于AFS 在稳定工况下稳定性控制效果较好,但是在车辆趋于非稳定工况时控制效果显著降低,而DYC 在各个工况下基本都能保证稳定性控制的有效性,但是会导致车速的波动,因此考虑到AFS和DYC 的特性,选取路径曲率ρ和曲率的变化率˙、车辆的横摆角速度与期望值的误差Eω和该误差的变化率以及车辆的纵向车速与期望值的误差和该误差的变化率作为可拓集合的特征量。
根据选取的特征量可以画出二维可拓集合[19],如图5所示。

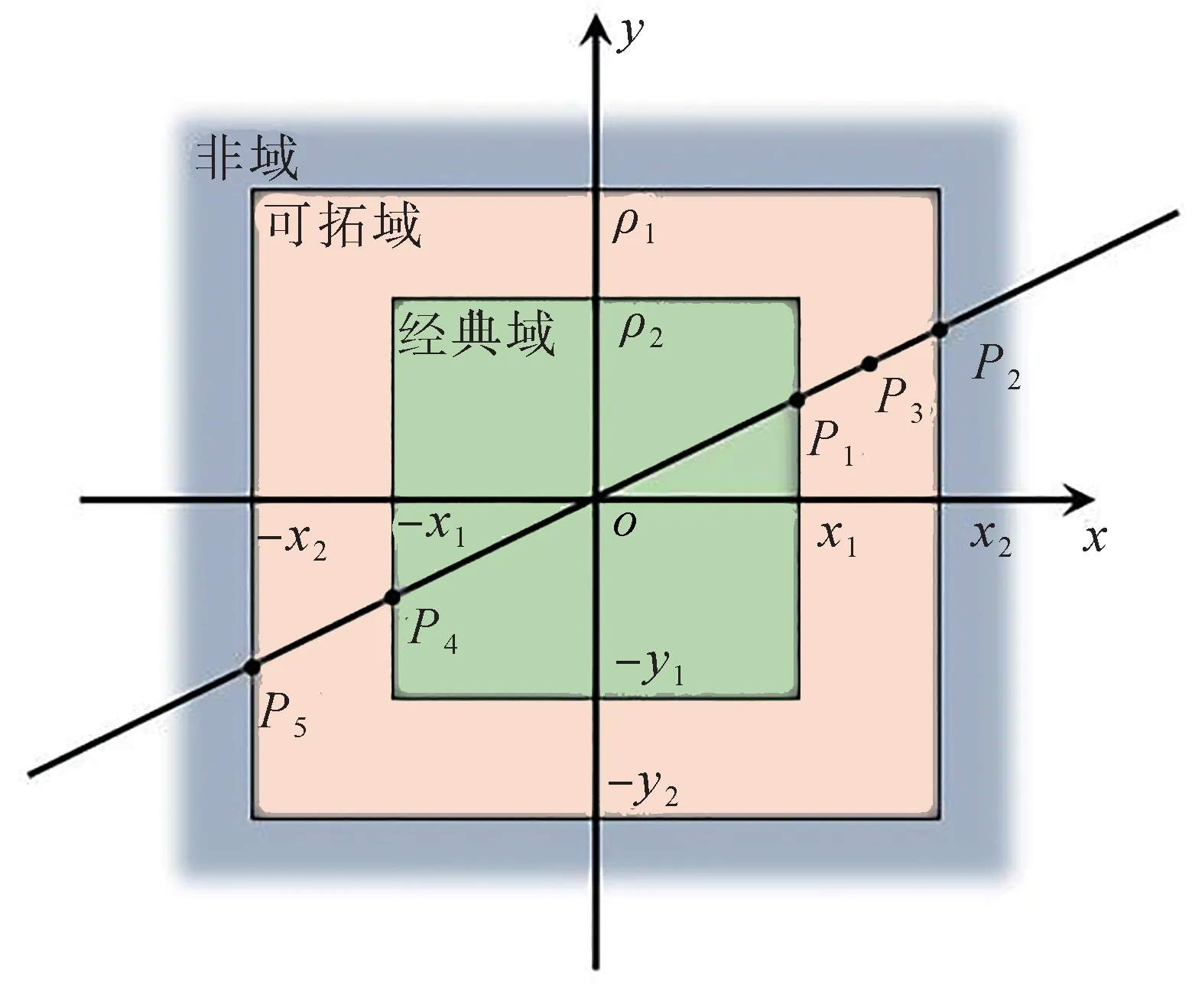
图5 二维可拓集合
当前的状态参数通过已经确定的二维可拓集合可以用关联函数表示其与可拓域和经典域之间的关系。关联函数主要通过当前的状态参数与可拓域以及经典域之间的最近距离进行确定,关联度函数[20]公式如下:
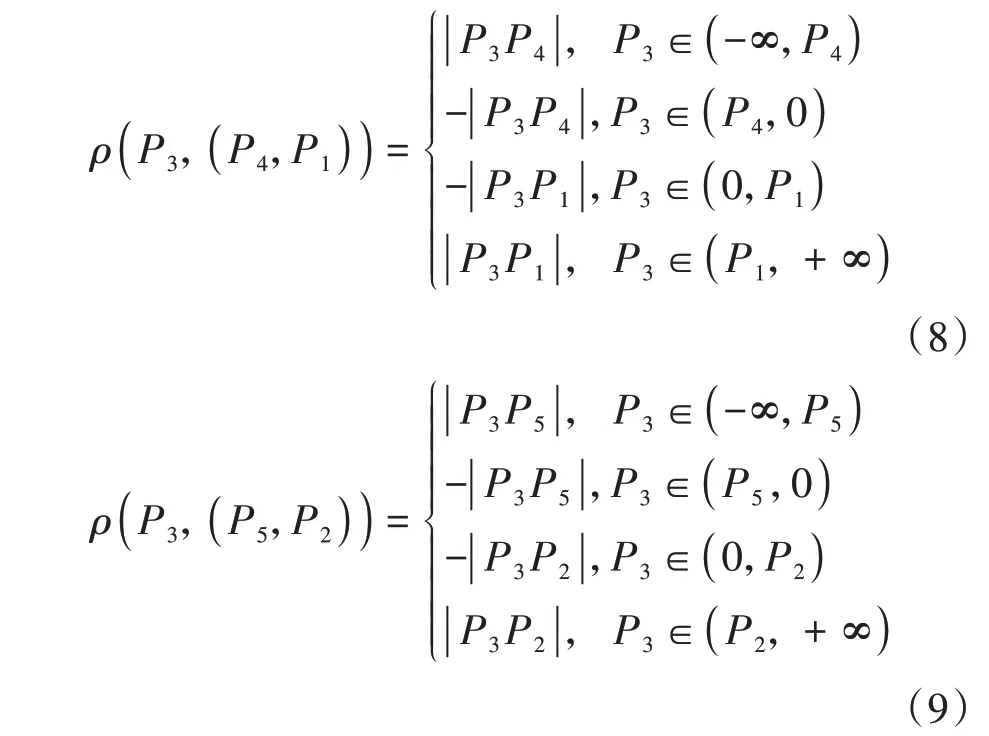
式中:ρ(P3,(P4,P1))为当前状态与经典域之间的最近距离;ρ(P3,(P5,P2))为当前状态与可拓域之间的最近距离。


K(s)即为关联函数,表示当前状态与可拓域和经典域之间的关联度。基于关联函数和可拓理论对当前状态的划分对AFS 和DYC 进行加权系数的分配。
根据路径曲率ρ和曲率变化率˙通过第一层可拓理论将当前状态划分为经典域、可拓域和非域,分别对应车辆行驶状态处于稳定、较稳定和非稳定工况。当车辆处于稳定工况时,不需要对车辆进行稳定性控制,因此将AFS的权重系数KA和DYC的权重系数KD均设置为0;当车辆处于非稳定工况时,需要优先考虑车辆的稳定性控制,同时由于本文的控制器设计中是将AFS 和DYC 一起考虑的,所以当AFS 和DYC 都启动时对车辆稳定性的控制效果最佳,因此将KA和KD都设置为1;当车辆处于较稳定工况时,需要对AFS 和DYC 的权重系数进行进一步设置。因此根据车辆的横摆角速度与期望值的误差Eω和该误差的变化率通过第二层可拓理论将当前状态划分为经典域、可拓域和非域,分别对于车辆的横摆角速度处于最优、较优和较差状态。当车辆的横摆角速度处于最优状态时,不需要DYC 起作用,因此将此时的KD设置为0;当车辆的横摆角速度处于较优状态时,DYC 的输出需要根据当前状态进行判断,因此将此时的KD设置为关联度函数K(s);当车辆的横摆角速度处于较差状态时,需要DYC 进行控制,因此将此时的KD设置为1。同时根据车辆的纵向车速与期望值的误差和该误差的变化率通过第二层可拓理论将当前状态划分为经典域、可拓域和非域,分别对应于车辆的纵向车速处于最优、较优和较差状态。当车辆的纵向车速处于最优状态时,不需要AFS 起作用,因此将此时的KA设置为0;当车辆的纵向速度处于较优状态时,AFS 的输出需要根据当前状态进行判断,因此将此时的KA设置为关联度函数K(s);当车辆的横摆角速度处于较差状态时,需要AFS进行控制,因此将此时的KA设置为1。
2.2 鲸鱼算法
由于可拓理论中边界的值确定需要进行多次试验才能确定相对合适的值,因此通过引入鲸鱼算法来进行可拓理论边界值的确定,简化了可拓理论边界值的确定过程,同时也保证了所确定的边界值可以获得最优的控制效果。
鲸鱼算法[21]是模仿自然界中鲸鱼捕食行为的智能优化算法,该算法主要模仿座头鲸的捕食过程(见图6)。其中每一条鲸鱼代表一个可行解,每条鲸鱼在捕食时有两种行为,一种是螺旋运动,另一种是包围攻击。每次每条鲸鱼选择其中一种行为的概率均为0.5。每条鲸鱼在每个时刻不断的选择不同的行为,最终完成捕食。
图6 鲸鱼捕食图
将鲸鱼算法用数学的方式来表达可以实现对目标问题的搜索优化求解,鲸鱼算法的流程如图7 所示。其中:i表示当前的种群;N表示种群数目;t表示迭代次数;tmax表示最大迭代次数,通过种群和迭代次数的不断增加实现嵌套循环,因此实际上鲸鱼算法的循环次数是种群数目和最大迭代次数的乘积N·tmax;p为单条鲸鱼选择螺旋运动或包围攻击的依据,是一个随机数,其取值范围为[0,1],当p<0.5时,选择螺旋运动行为,当p≥0.5时,选择包围攻击行为。以此实现螺旋运动和包围攻击的等可能选择。
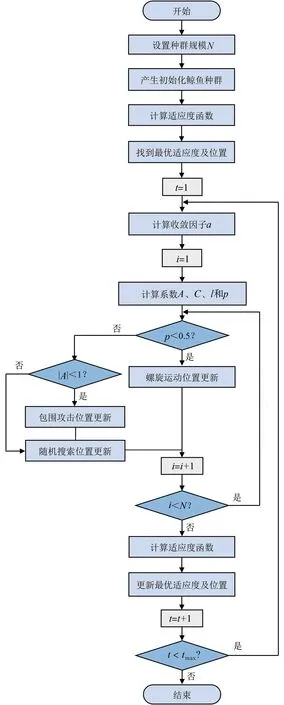
图7 鲸鱼算法流程图
由于可拓理论中需要进行确定的特征量主要有路径曲率ρ、路径曲率变化率˙、横摆角速度误差Eω、横摆角速度误差变化率、纵向车速误差以及纵向车速误差变化率。因此将这些待优化的特征量作为鲸鱼位置的分量。第i条鲸鱼的第j个位置分量在其取值范围内的初始值为其中:i为鲸鱼的种群规模;j为鲸鱼的位置分量个数;为第i个鲸鱼的第j个位置分量取值的随机数,其取值范围为[0,1]。
适应度函数表征种群个体对于当前环境的适应性,也代表了种群个体的优劣程度。由于本文的主要评价指标是横摆角速度误差和纵向车速误差,因此将全时段的横摆角速度误差与纵向车速误差之和作为适应度函数的评价指标,目标函表示为误差之和与时间乘积的积分J=。适应度函数与目标函数的关系可表示为。
螺旋运动位置更新公式为

式中:Xi(t+1)表示第i条鲸鱼在第t+1 次迭代中的位置;上角标b为用于限定对数螺旋形状的常数;上角标l为在[-1,1]之间的随机数;Xp(t)表示在第t次迭代中猎物的位置同时也是在第t次迭代中的最佳位置;Di表示在第t次迭代中第i只鲸鱼和猎物之间位置差的绝对值。
包围攻击主要包括两个位置更新公式:包围捕食位置更新公式和随机搜索位置更新公式。
包围捕食位置更新公式为
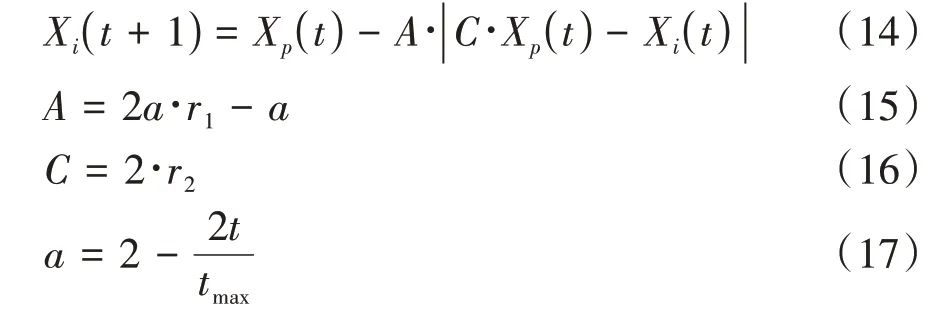
式中:r1和r2为在[0,1]之间的随机数;t为迭代次数;tmax为最大迭代次数;a为收敛因子,随着迭代次数的不断增加收敛因子从2线性减小到0。
随机搜索位置更新公式为

式中Xrand(t)表示在第t次迭代中随机选取的鲸鱼位置。
选择包围捕食位置更新公式和随机搜索位置更新公式的依据是系数A的值,随着迭代次数t的增加,系数A逐渐减小,当|A|≥1时选择随机搜索位置更新公式,当|A| <1时选择包围捕食位置更新公式。最终通过不断迭代得到对应最优适应度函数的最优位置,既最优可拓边界值。
3 下层AFS/DYC控制器模块
控制系统主要包括两个模块:控制器模块和转矩分配模块,其结构如图8所示。
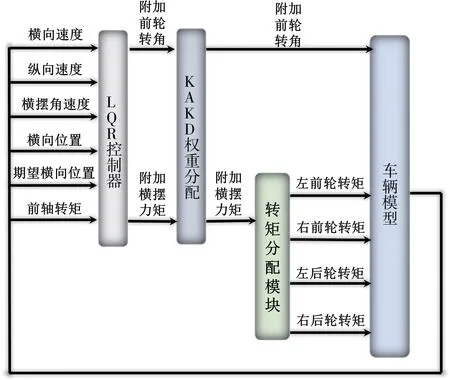
图8 下层控制系统结构图
3.1 控制器设计
AFS 和DYC 的控制器采用LQR 控制器。DYC的转矩分配系统采用非线性优化方法。
为了便于后续控制器的设计,将车辆2 自由度模型的微分方程式改写为状态方程形式:

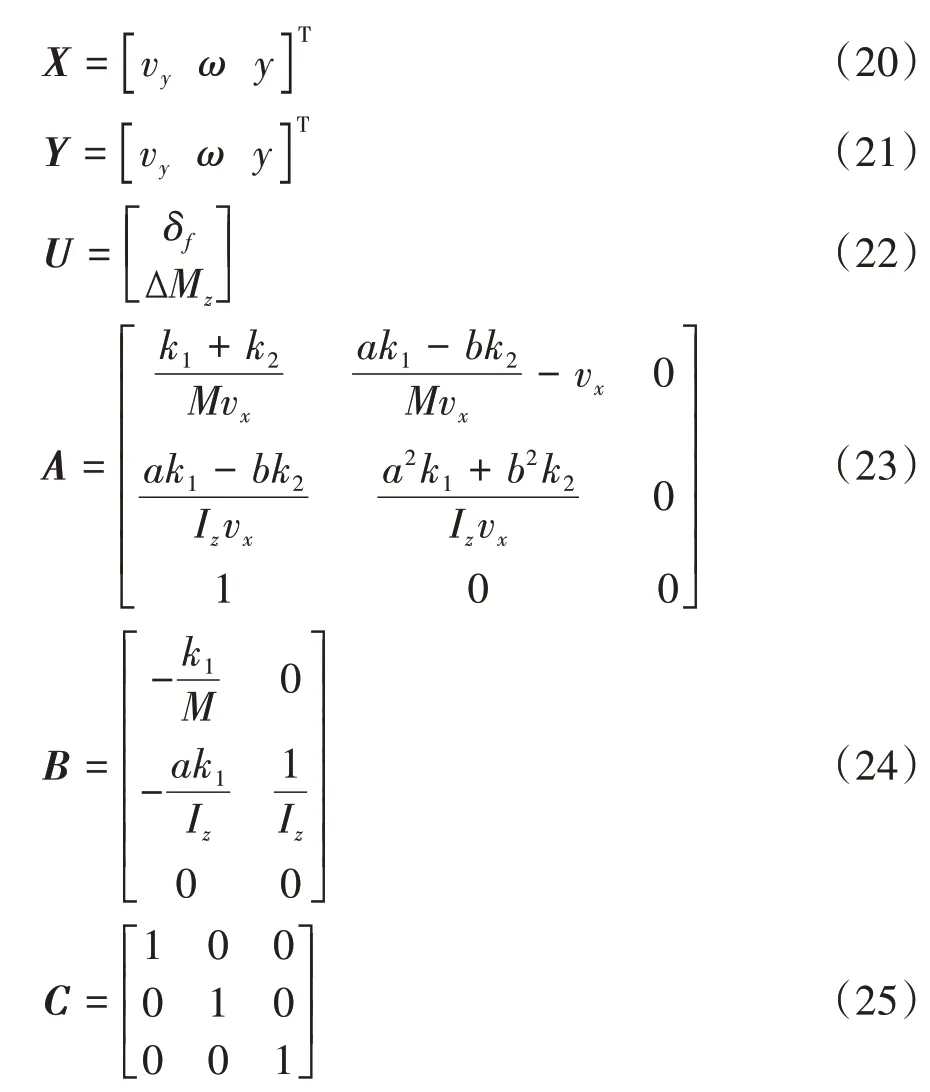
式中:X表示状态量;Y表示输出量;U表示输入量;A表示状态矩阵;B表示输入矩阵;C表示输出矩阵。
将上述得到的状态方程进行离散化处理:

根据式(27)建立系统的目标函数为
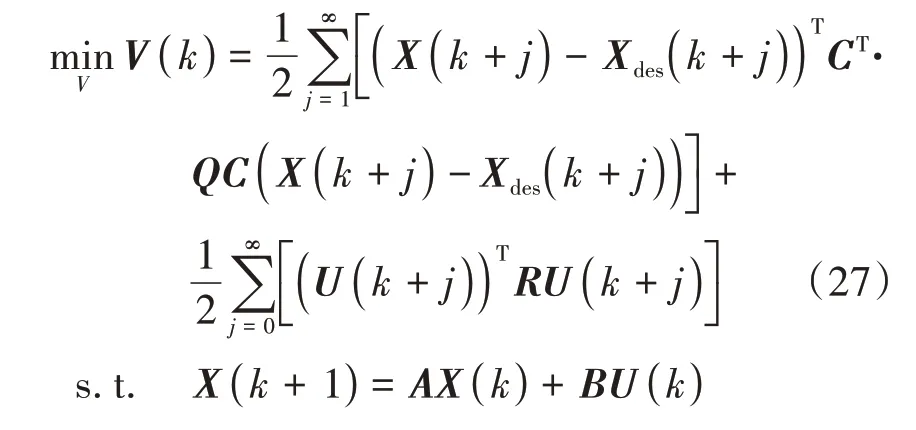
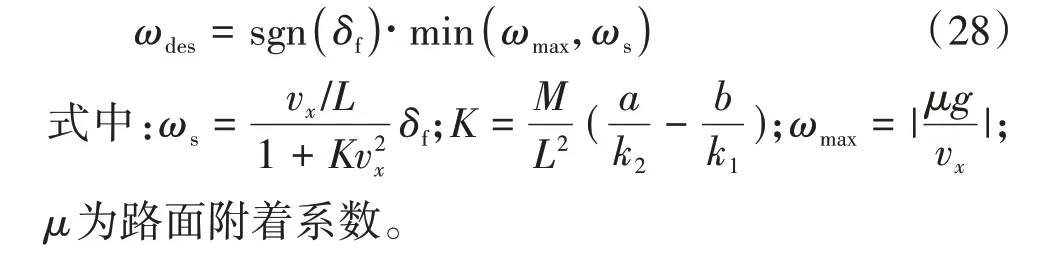
式中:Q=diag[qωqy]为状态向量的权重矩阵;R=diag[rδrΔM]为输出的权重矩阵;Xdes(k)=为系统状态的期望值。横摆角速度期望ωdes为
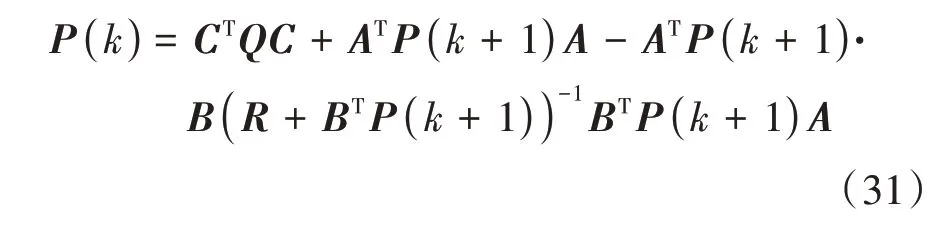
LQR问题的解表示为

式中P为离散黎卡提方程[22]的解:
根据上层驾驶状态识别模块得到的AFS和DYC的权重系数KA和KD来分配输出量附加前轮转角Δδf和附加横摆力矩ΔMz。
3.2 转矩分配设计
要将附加横摆力矩转换为4 个车轮的驱动力,需要进行转矩分配。考虑到轮胎的特性,建立目标函数:

同时轮胎的纵向力还需要满足驱动的需求:

式中F为驱动汽车的纵向力,可表示为

轮胎的纵向力还需要满足附加横摆力矩的需求:

式中tf和tr为车辆前后轴的宽度。
轮毂电机的峰值转矩对轮胎纵向力的不等式约束为[23]:
式中:Tmin和Tmax分别为轮毂电机的极值转矩;Reff为车轮半径。
因此4 个车轮的转矩分配可以写为非线性约束的优化问题:
最终分配给4个车轮的转矩可以表示为

4 仿真分析
仿真工况选择双移线工况和紧急避障工况,在Carsim 和Simulink 中建立仿真模型进行仿真试验,通过Carsim中的最优驾驶员模型对参考路径进行跟踪控制。将本文提出的基于改进分层可拓理论的AFS/DYC协调控制方法与未使用鲸鱼算法进行优化的基于分层可拓的AFS/DYC 协调控制方法和只考虑了横摆角速度误差和纵向车速误差的基于普通可拓的AFS/DYC 协调控制方法进行对比,验证该方法的控制效果。车辆的参数如表1所示。
表1 车辆参数值
选取纵向轮胎力和侧向轮胎力通过对Carsim 中的轮胎模型与魔术公式轮胎模型的参数进行拟合可以得到各个参数的拟合公式为
经过拟合可以得到如图9和图10所示的纵向与侧向轮胎力拟合图。仿真计算时鲸鱼算法的种群数设置为5,最大迭代次数设置为10,车速设置为80 km/h,仿真时间设置为10 s。
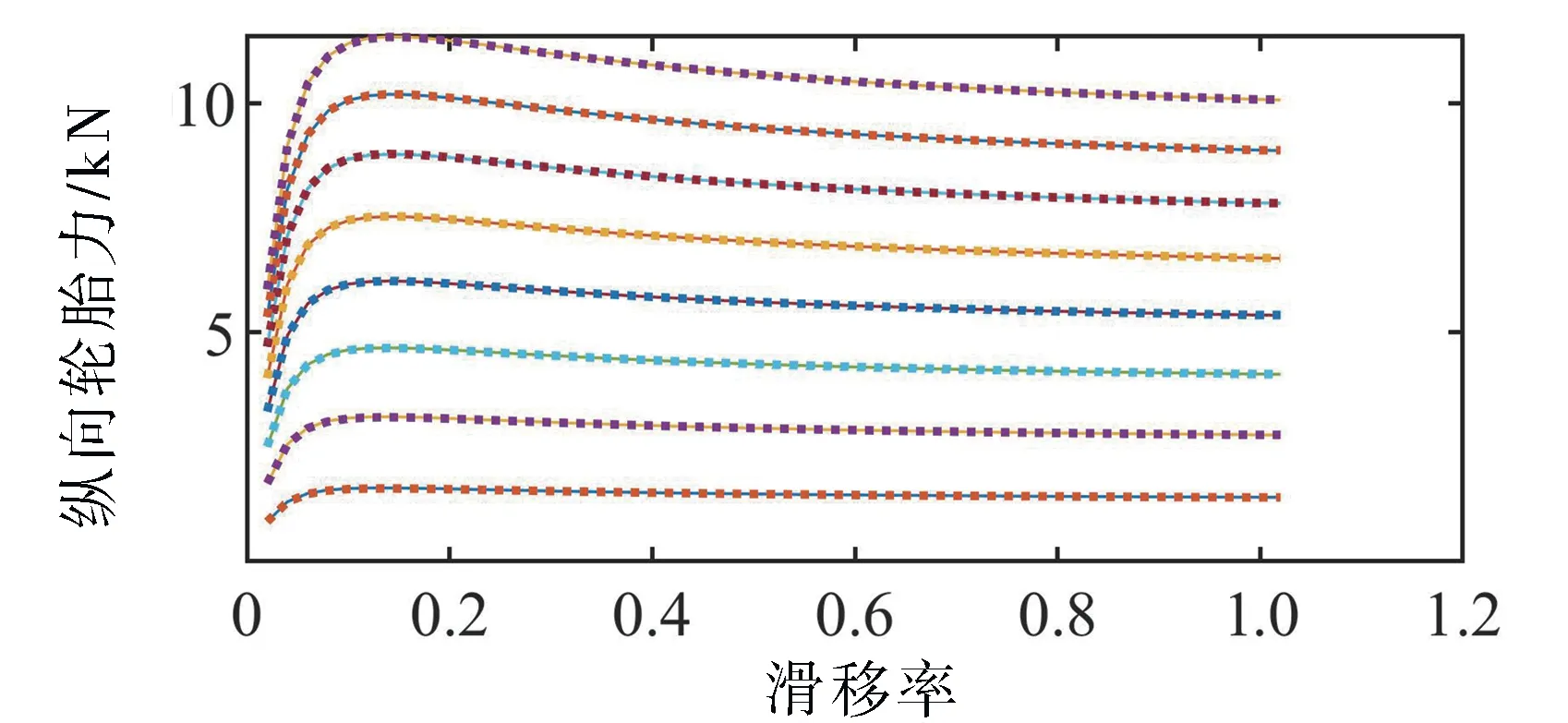
图9 纵向轮胎力拟合图
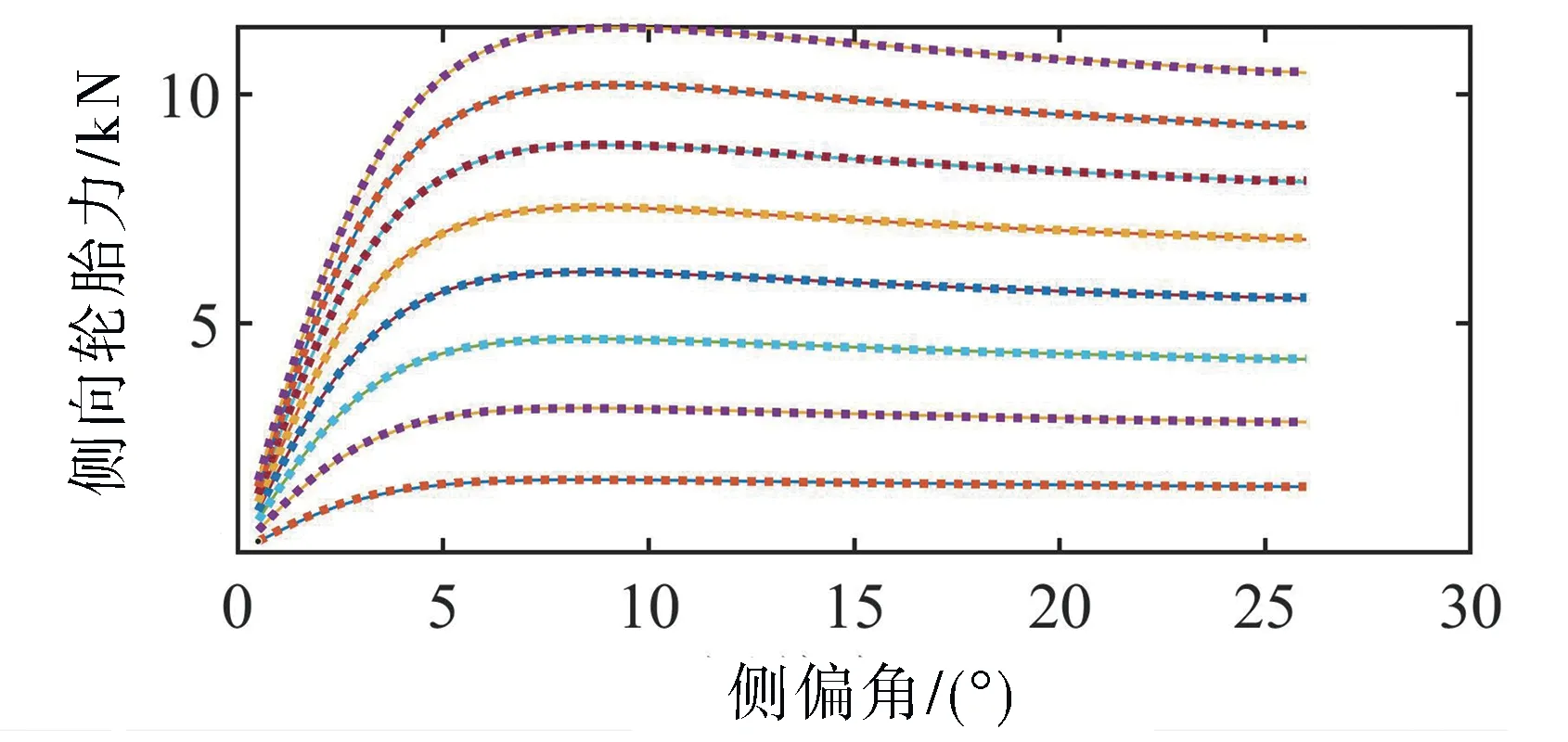
图10 侧向轮胎力拟合图
由AFS 和DYC 的控制特点可知,DYC 相较于AFS 对于车辆的横摆角速度控制性能更好,由于DYC 在控制时是对各个车轮的转矩进行控制,因此DYC相对于AFS对车速的影响更大。考虑到上述控制系统的特点,本文的评价指标选用车辆横摆角速度和车速。
4.1 仿真工况1:双移线工况
双移线工况是车辆较为常见的行驶工况,因此选取双移线工况来代表路径规划得到的常规路径。该工况的路径跟踪图如图11 所示,鲸鱼算法的迭代次数如图12所示。
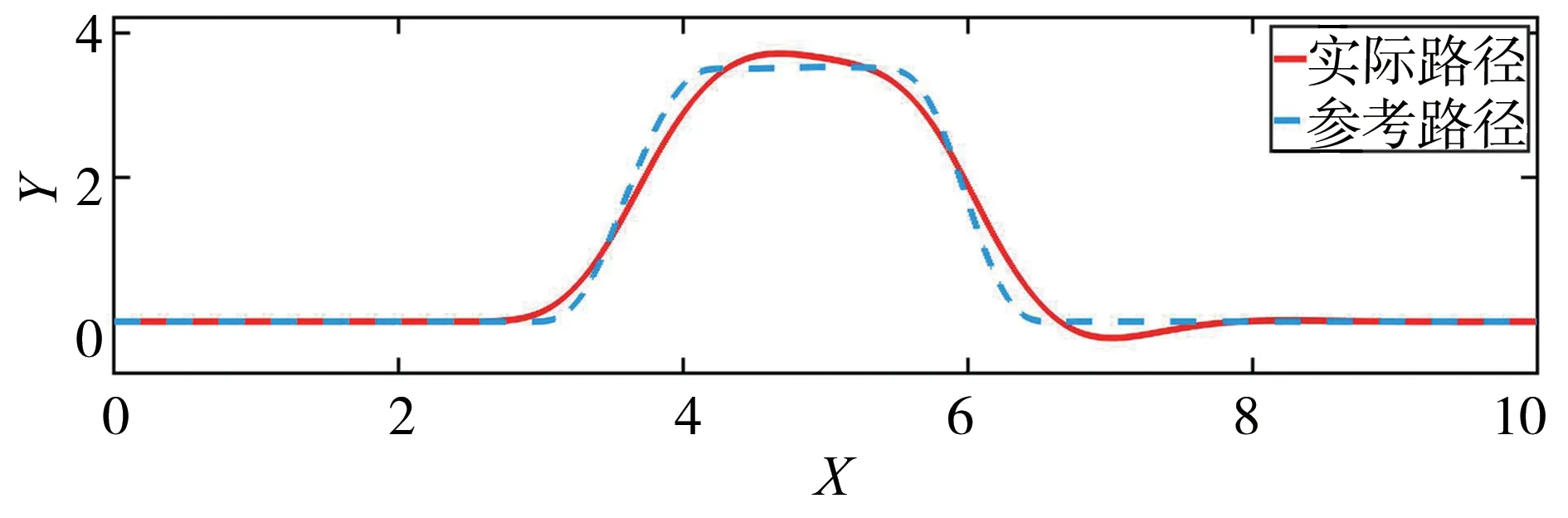
图11 双移线工况路径跟踪图
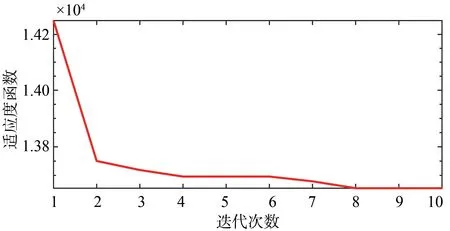
图12 鲸鱼算法迭代图
从图中可以看出在双移线工况下,鲸鱼算法在迭代到8次的时候成本函数基本达到最优。
车辆行驶参数与控制器输出参数如图13~图18所示。
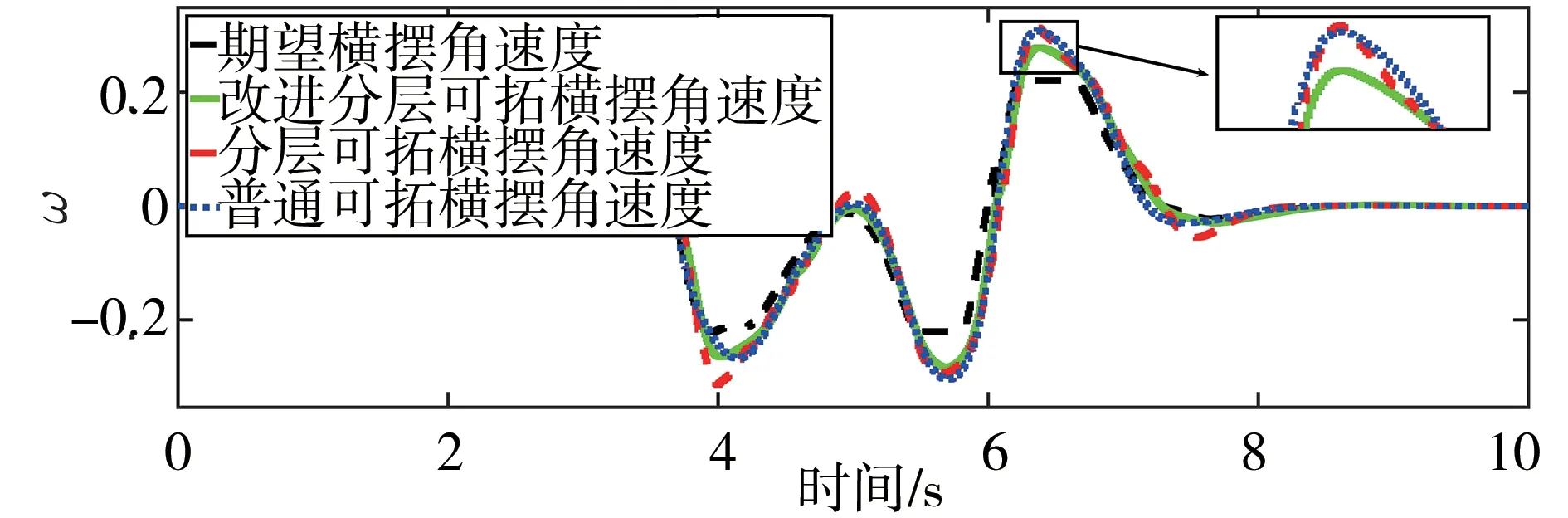
图13 双移线工况横摆角速度对比图
由图13和图14可知,基于改进分层可拓的智能车辆AFS/DYC 协调控制系统与基于分层可拓的智能车辆AFS/DYC 协调控制系统和基于普通可拓的智能车辆AFS/DYC 协调控制系统相比,在有效控制车辆横摆角速度使其跟踪期望值的前提下还能很好地控制车速的变化。
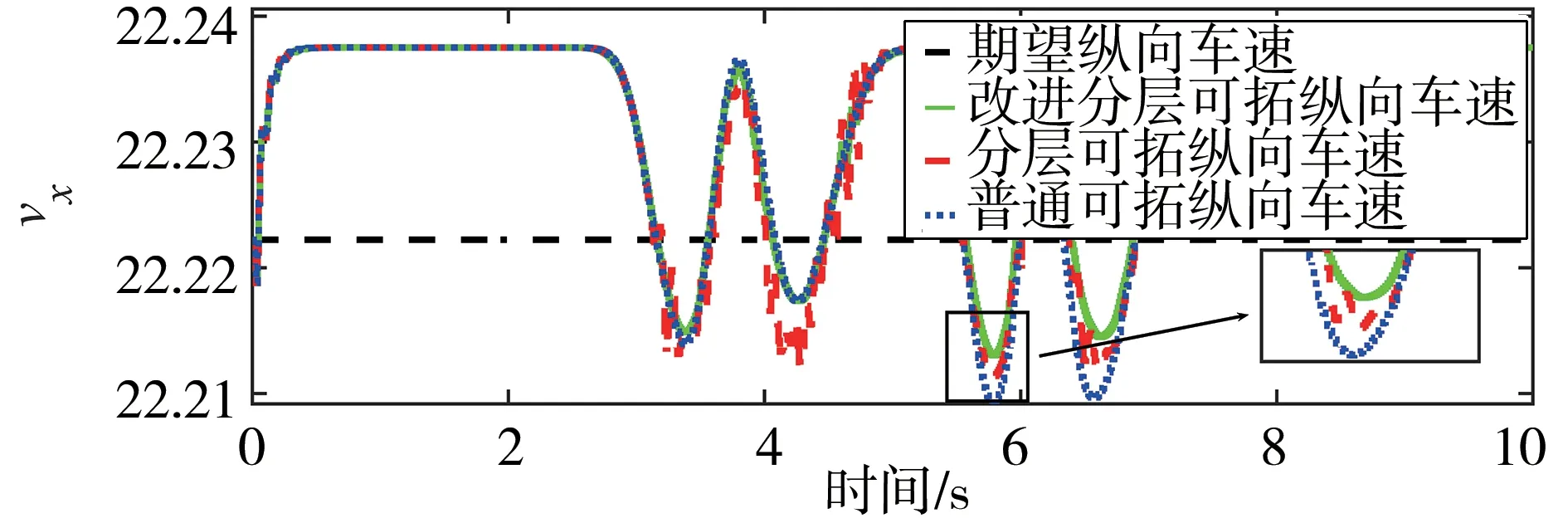
图14 双移线工况车速对比图
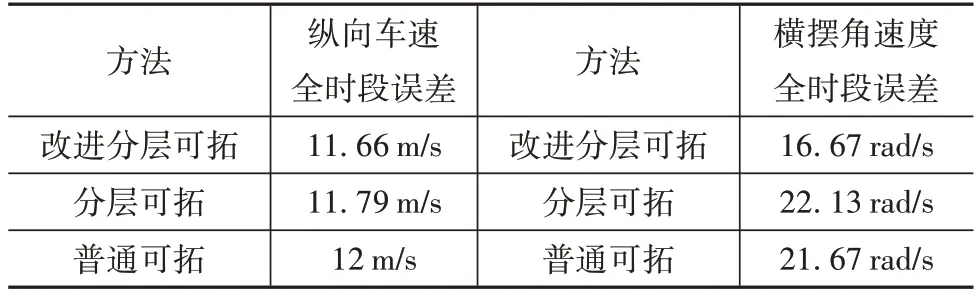
表2 双移线工况全时段误差值
图15 和图16 为双移线工况下经过协调可拓模块输出的AFS 和DYC 的权重系数。图17 和图18 为本文提出的改进分层可拓协调控制系统与分层可拓协调控制系统和普通可拓协调控制系统的附加横摆力矩和附加前轮转角的对比图。可以看到,本文提出的改进分层可拓协调控制系统对附加横摆力矩和附加前轮转角的分配情况更合理,同时由于分配策略的制定一般未考虑输出的抖振,因此对于AFS 和DYC 的输出经常存在抖振,通常会使用激活函数进行AFS 和DYC 的分配来减少输出的抖振。从图17和图18 可以看出,本文提出的改进分层可拓方法在一些容易产生抖振的时刻,与未进行改进的分层可拓方法和激活函数分配方法相比对输出的抖振遏制效果更好。
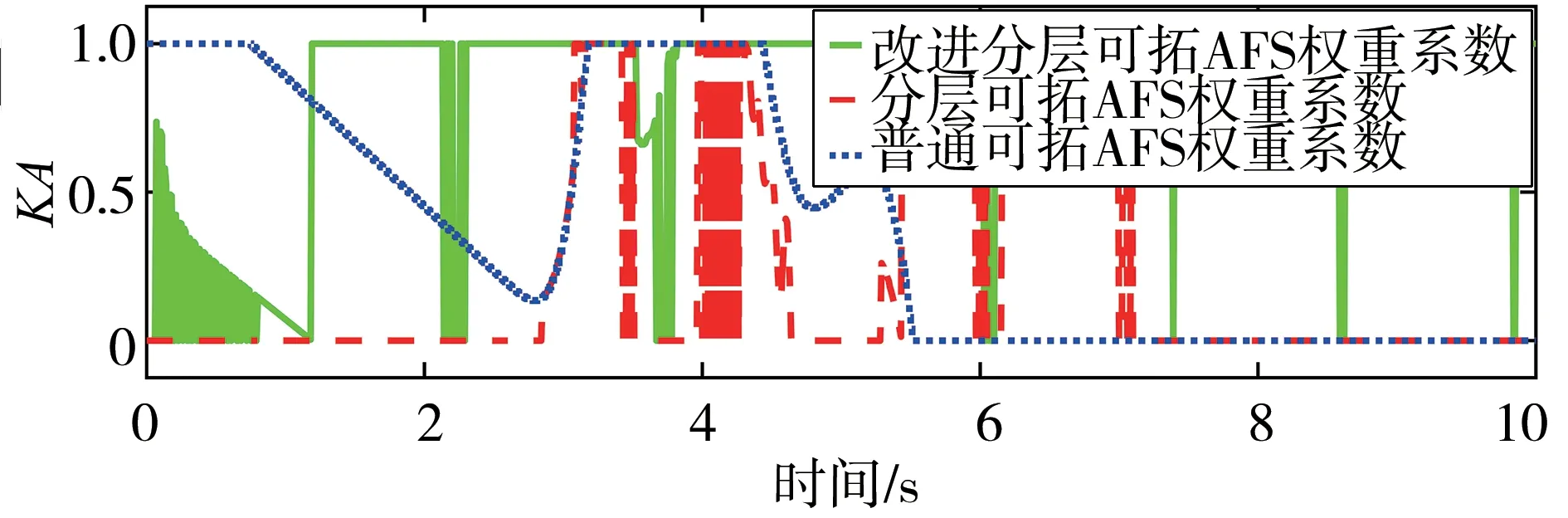
图15 双移线工况AFS权重系数对比图
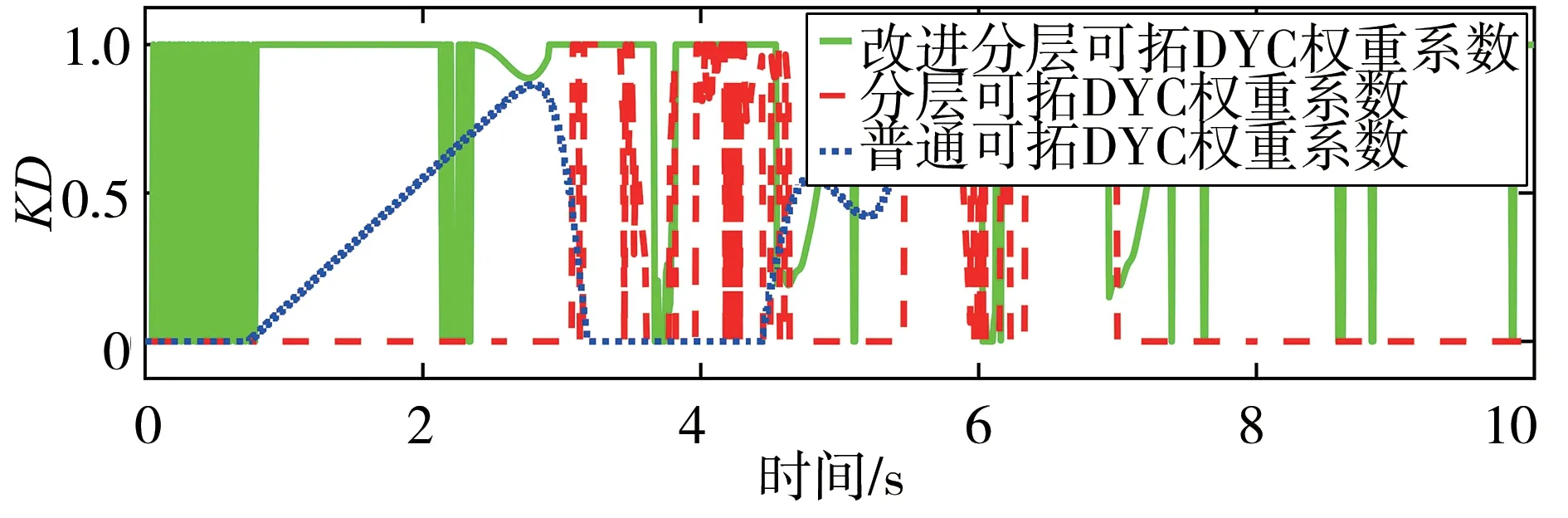
图16 双移线工况DYC权重系数对比图
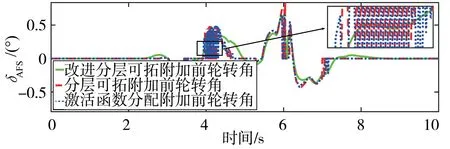
图17 双移线工况附加前轮转角对比图
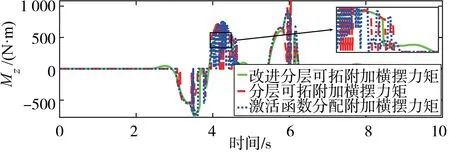
图18 双移线工况附加横摆力矩对比图
根据上述的结果分析可知,本文提出的改进分层可拓协调控制系统在双移线工况下对车辆的稳定性和驾驶员的驾驶体验相较于分层可拓协调控制系统和普通可拓协调控制系统均有提升。
4.2 仿真工况2:紧急避障工况
紧急避障工况是车辆不常见的行驶工况,因此选取紧急避障工况来代表路径规划得到的非常规路径。该工况的路径跟踪图如图19所示。
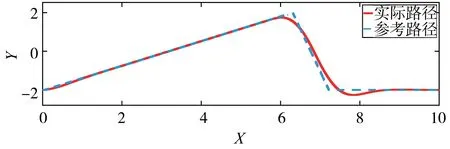
图19 紧急避障工况路径跟踪图
鲸鱼算法的迭代次数如图20 所示。从图中可以看出,在紧急避障工况下鲸鱼算法在迭代到5 次的时候成本函数基本达到最优。
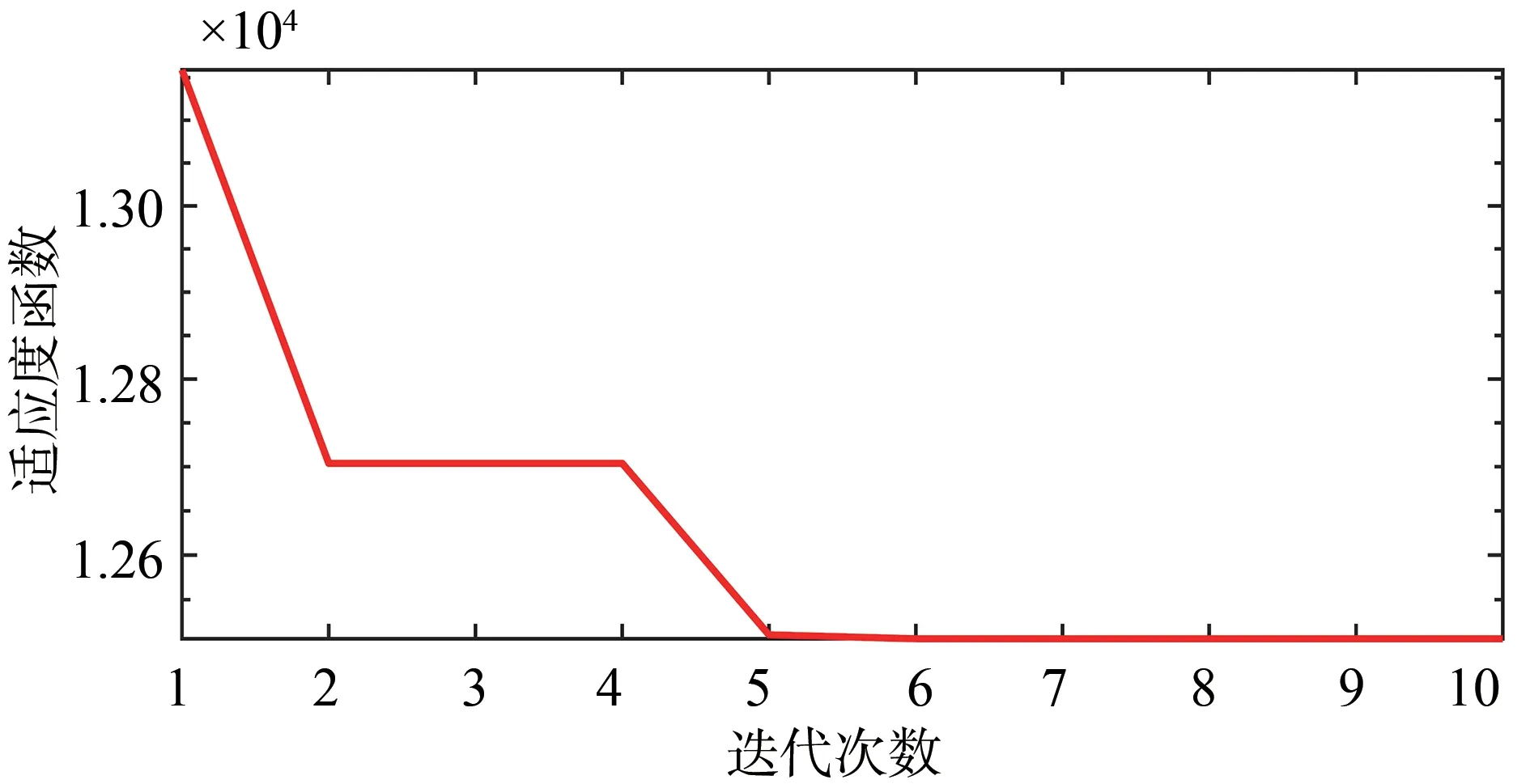
图20 鲸鱼算法迭代图
车辆行驶参数与控制器输出参数如图21~图26所示。
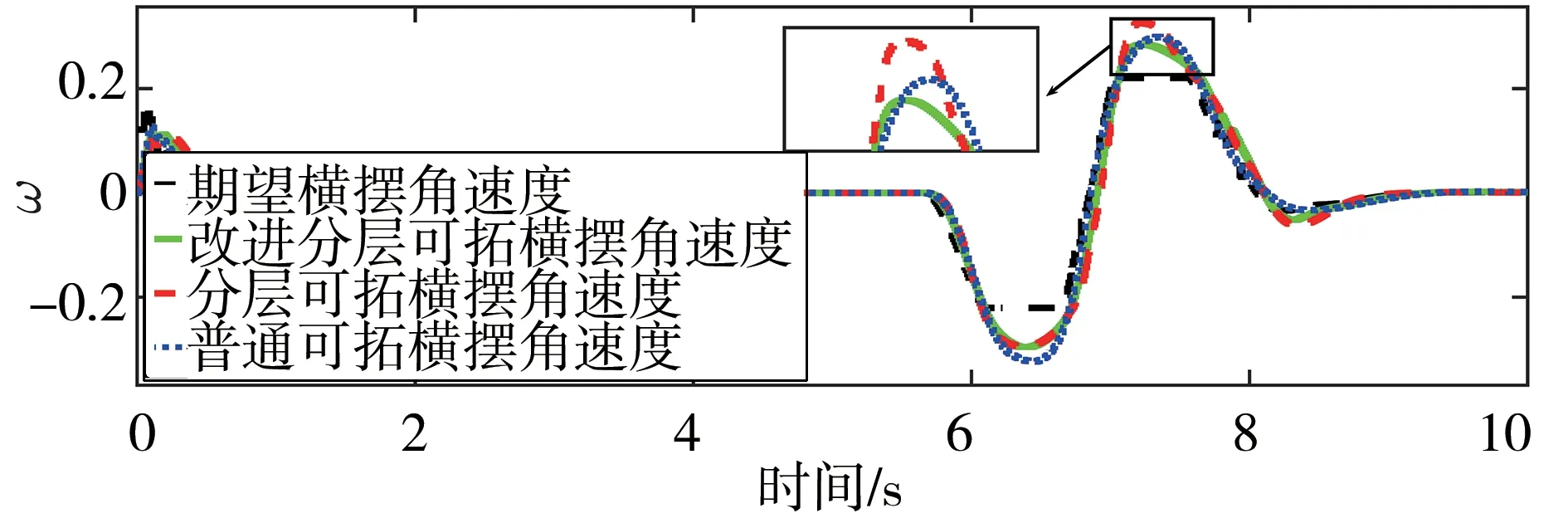
图21 紧急避障工况横摆角速度对比图
由图21和图22可知,基于改进分层可拓的智能车辆AFS/DYC 协调控制系统与基于分层可拓的智能车辆AFS/DYC 协调控制系统和基于普通可拓的智能车辆AFS/DYC 协调控制系统相比,在有效控制车辆横摆角速度使其跟踪期望值的前提下还能很好地控制车速的变化。
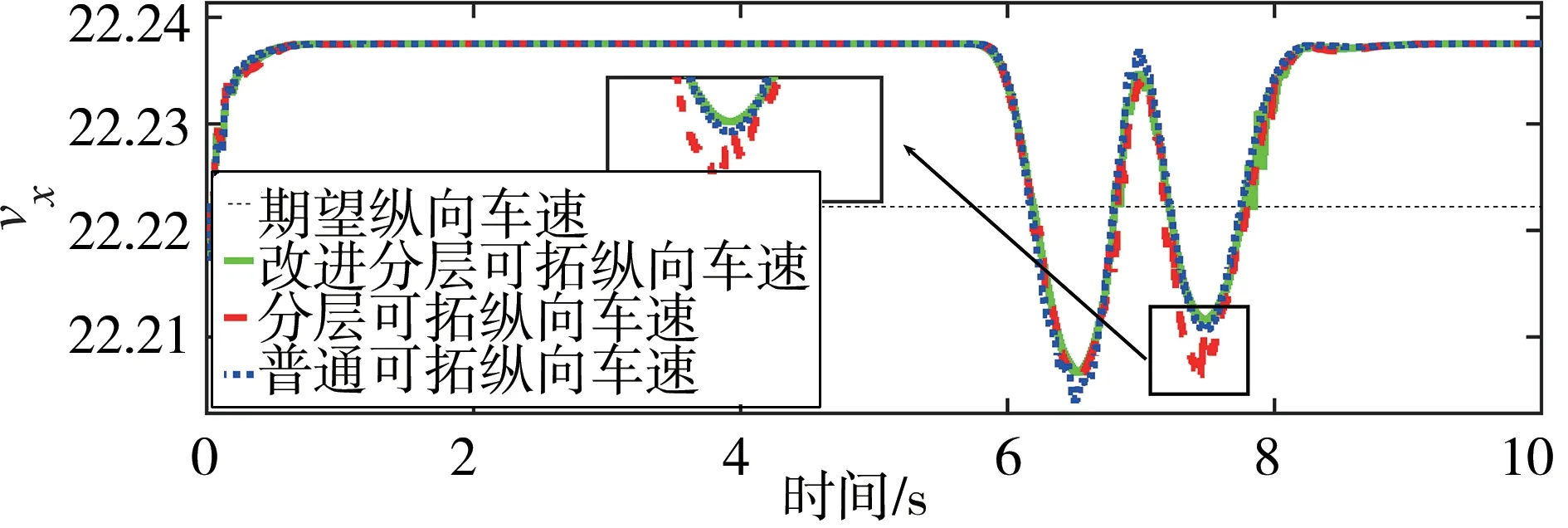
图22 紧急避障工况车速对比图
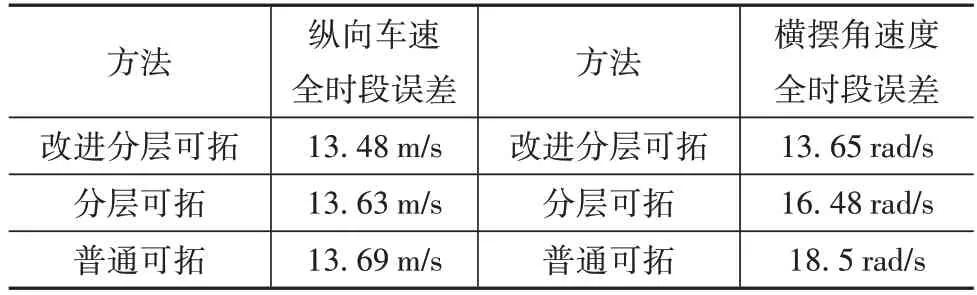
表3 紧急避障工况全时段误差值
图23 和图24 为紧急避障工况下经过协调可拓模块输出的AFS 和DYC 的权重系数。图25 和图26为本文提出的改进分层可拓协调控制系统与分层可拓协调控制系统和普通可拓协调控制系统的附加横摆力矩和附加前轮转角的对比图。可以看到,本文提出的改进分层可拓协调控制系统对附加横摆力矩和附加前轮转角的分配情况更合理,同时由于分配策略的制定一般未考虑输出的抖振,因此对于AFS和DYC 的输出经常存在抖振,通常会使用激活函数进行AFS 和DYC 的分配来减少输出的抖振。从图25和图26可以看出,本文提出的改进分层可拓方法在一些容易产生抖振的时刻,与未进行改进的分层可拓方法和激活函数分配方法相比对输出的抖振遏制效果更好。
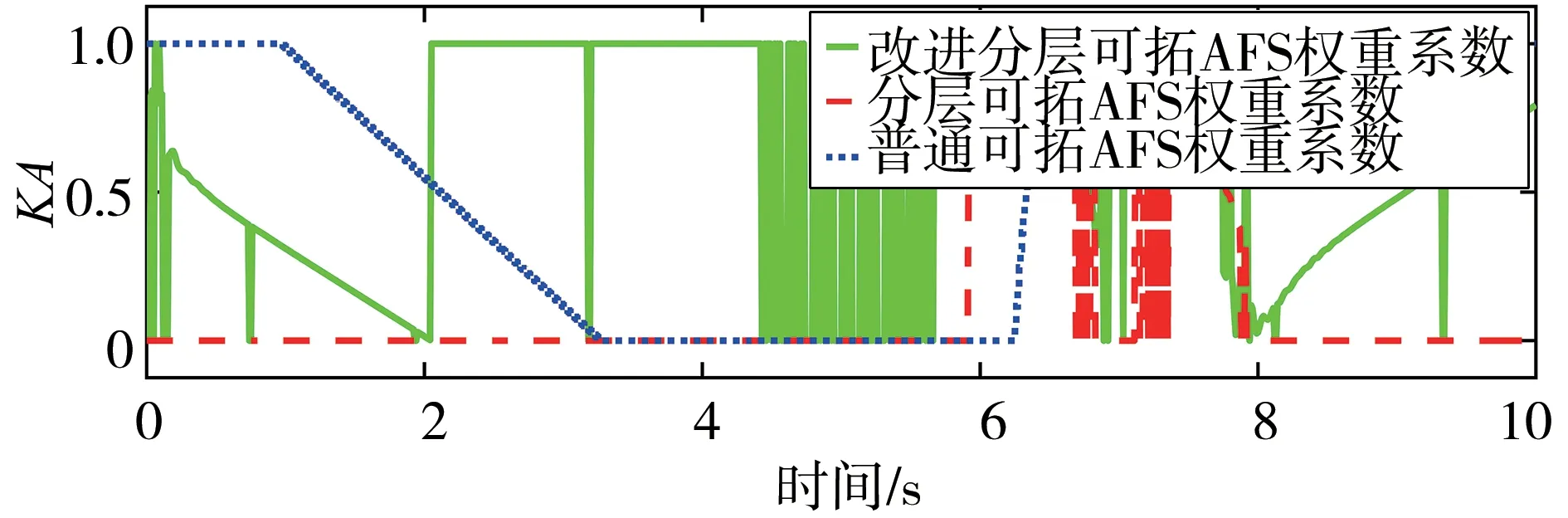
图23 紧急避障工况AFS权重系数对比图
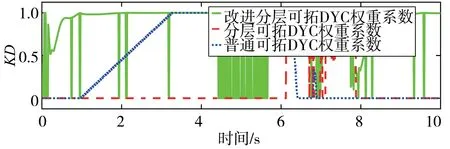
图24 紧急避障工况DYC权重系数对比图
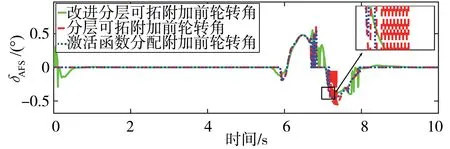
图25 紧急避障工况附加前轮转角对比图
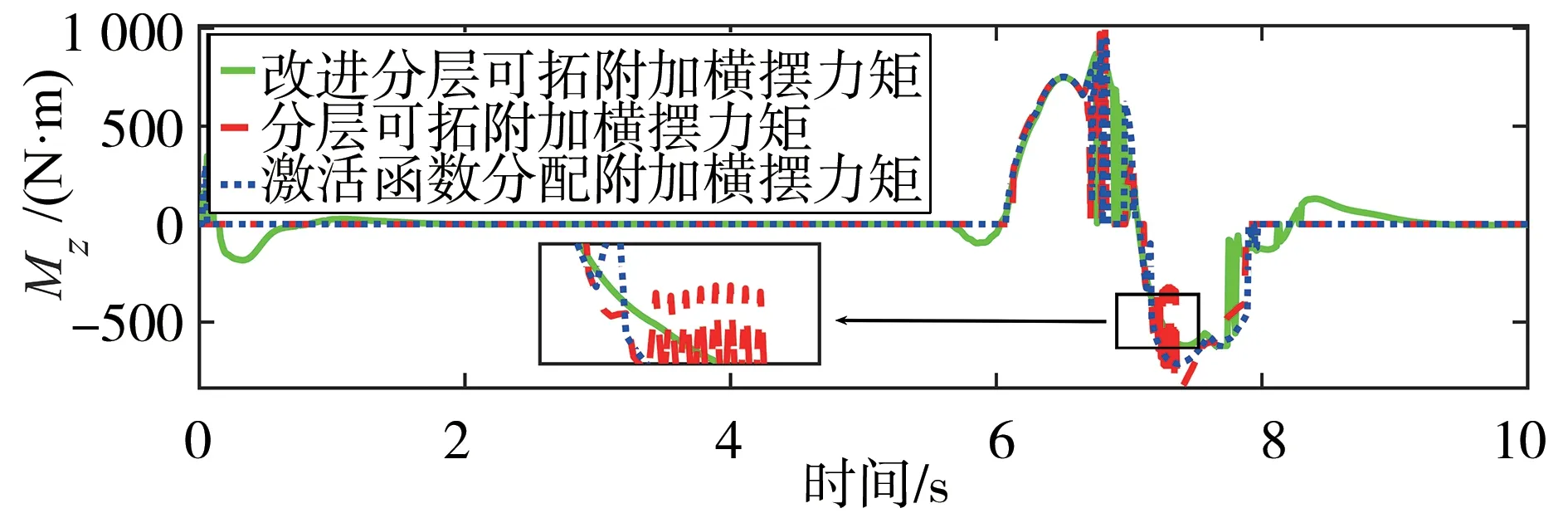
图26 紧急避障工况附加横摆力矩对比图
综上所述,本文提出的基于改进分层可拓的AFS/DYC 协调控制系统,通过分层可拓理论将路径曲率、车辆横摆角速度和纵向车速作为特征量进行了状态划分,根据划分的状态和关联度函数,对AFS和DYC 的输出参数进行加权分配从而实现两个子系统的协调控制,同时用鲸鱼算法对可拓理论的边界值确定过程进行了优化。根据仿真结果可得本文提出的协调控制系统可以有效协调AFS 和DYC,在有效控制车辆的横摆角速度跟踪期望横摆角速度的同时也可以有效控制车速的波动。
5 结论
(1)依据分层可拓理论的特性将路径曲率与车辆横摆角速度和纵向车速结合起来进行AFS/DYC的协调控制,实现对AFS 和DYC 系统之间的优势互补,使得两个底盘子系统都能在最适合的工况下工作。同时使用鲸鱼算法优化了可拓理论的边界值选择过程,提高了边界值选择的效率和选择结果的准确性。
(2)本文根据所提出的改进分层可拓理论设计了AFS/DYC 协调控制系统,并在双移线工况和紧急避障工况下进行了仿真试验,仿真结果证明了该方法可以有效提升车辆的稳定性,同时也能减少车速的波动。
猜你喜欢
幼儿100(2022年41期)2022-11-24 03:20:20
数学大王·趣味逻辑(2020年9期)2020-09-06 14:17:17
小天使·二年级语数英综合(2019年4期)2019-10-06 02:44:36
动漫星空(2018年4期)2018-10-26 02:11:54
汽车维护与修理(2018年1期)2018-04-04 01:13:22
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
