基于试飞分析的直升机动力系统边界保护控制方法
2023-02-09 08:34宋招枘赵敬超杨文凤
北京航空航天大学学报 2023年1期
宋招枘,赵敬超,杨文凤
(中国飞行试验研究院,西安 710089)
直升机等旋翼类飞行器,其动力系统的主要部件一般为涡轴发动机[1],为飞行器提供升力及拉力,驱动飞机正常飞行,在旋翼类飞行器各系统部件中的作用举足轻重[2],动力系统异常状态极易引发重大飞行事故。近年来,动力系统的传统机械液压式燃油调节方法正逐步转向电传燃油控制方法[3],日益趋向于“稳、准、快”的优良控制效果。同时,更加可靠的信号和更加优异的系统性能,可支持更多更高级的控制功能,保障飞行安全[4]。
以涡轴发动机为主要部件的动力系统,依靠输出轴功率来提供飞行器所需的动力[5]。涡轴发动机具有体积小、质量小及输出功率高等特点[6]。由于燃气涡轮和动力涡轮之间无机械连接,依靠气动传导,因此在发动机的工作过程中,气动热力特性极为复杂。受环境及发动机本体的影响,工作过程中参数变化剧烈[7],必须依靠高效且可靠的控制才能保证发动机的正常工作。同时,对于发动机的参数边界,应使用限制及保护措施[8],利于脱离危险状态,防止危及飞行安全。
出于对发动机及旋翼系统的热力特性、机械强度、加工工艺等方面的考虑,目前工程中实际应用的涡轴发动机,在关键工作参数上都有明确的限制。例如:扭矩限制、涡轮间温度限制及转速限制等。发动机特定参数一旦超限,一般采取自动降低油门、减少功率的方法,保证发动机持续工作不超载[9]。
针对当前发动机控制领域的研究现状,中国航空工业集团公司航空动力控制系统研究所姚华[10]着重研究了发动机的容错控制;杨征山等[11]全面研究了发动机控制回路方案等。但减少功率方法的缺陷多发生在发动机超限工况下,常规操作习惯可能产生不利影响,且不属于容错控制领域,在减少功率同时兼顾负载安全和自动改出的超限保护类功能领域的研究较少。
基于动力系统和发动机的特点、不足及研究现状,本文提出一种边界保护控制方法,通过总距控制律设计,在发参超限状态下实现自动保护及自动改出,及时恢复动力涡轮转速的正常额定控制,减轻飞行员操纵负担并保障飞行安全。在控制领域,实现对当前发参限制功能的显著优化,从控制理论上凸显设计的全面性,提升了动力系统在全工况下的控制性能。所提方法基于某型直升机的实际试飞数据,通过对数据及现象的分析,结合动力系统控制原理和控制律设计方法,最终通过仿真结果验证了边界保护控制方法原理和设计的正确性。
1 飞行试验发参数据超限分析
图1 为某型直升机试飞过程中的发参数据。图中:WF 为总距角度;Q为总扭矩;Nr为旋翼转速;Ng为燃气涡轮转速;Hp为气压高度;Ngc为燃气涡轮换算转速,该值决定发动机的燃料燃烧及转速输出情况,该数值超限时意味着发动机进入燃烧极限状态,长时间工作在该状态将对燃烧系统和部件造成损害;T45L和T45R为左右两侧4、5 级涡轮间温度(4、5 级涡轮位置靠后),其温度体现发动机的动力输出状态,在发动机中作为关键参数进行监测,超限时易对末端涡轮造成损伤;总扭矩值体现动力轴承载程度,为避免轴出现损坏,作为关键参数进行监测;根据图1 曲线,上述参数均未超限,动力涡轮转速Np在控制系统作用下,较为稳定地维持在额定状态,实现正常稳态控制。
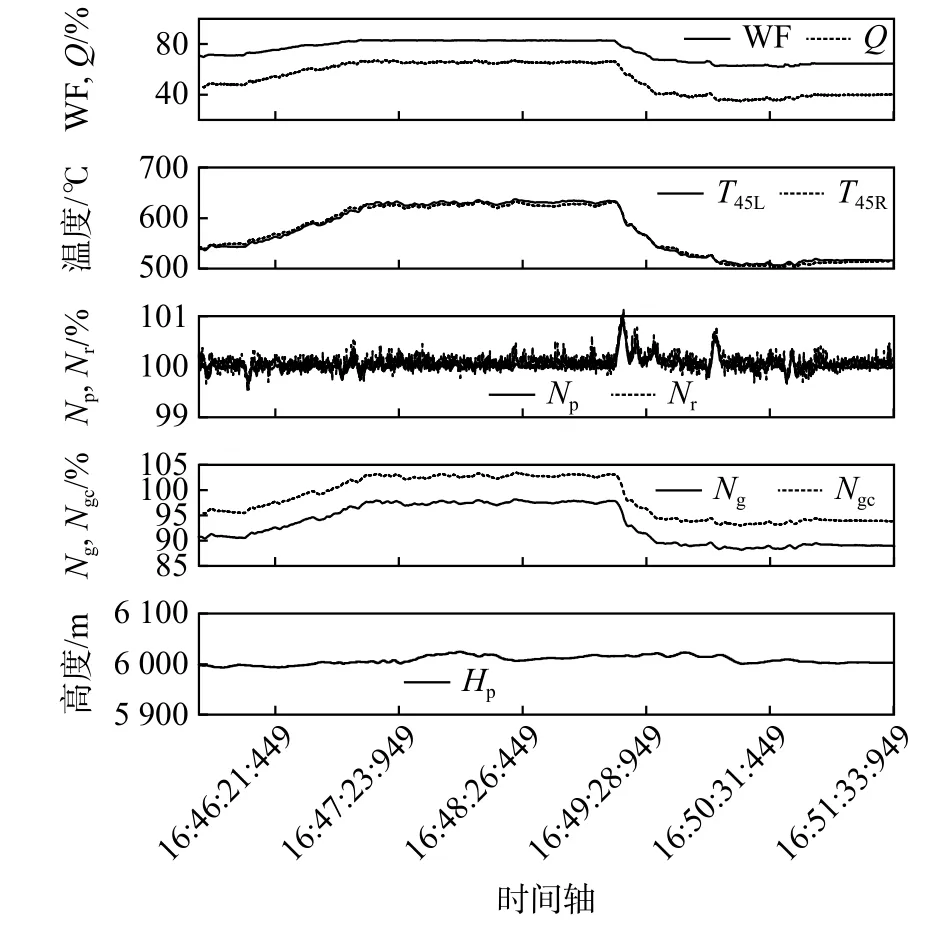
图1 未超限工况发参数据曲线Fig. 1 Parameter data curve of unexceeded working condition
图2 为某型直升机在高寒环境下进行连续爬升科目试飞时的发参数据,在横轴约13:57:54 时刻,动力涡轮转速Np因燃气涡轮换算转速Ngc超限饱和,且总距在较长时间内保持在高量值,并伴随间隔性小幅提距指令输入,导致Np降至约96%,小于额定值100%。
根据试飞曲线的后段,当横轴约14:05:19 时刻,总距量值下降之后,旋翼气动扭矩降低,所需Ngc量值减小,所有发参低于限制值,控制系统调节燃油和功率后,动力涡轮转速迅速恢复至100%,即正常额定值。根据图1 及图2 曲线可得:①为保证动力系统的安全运行,任一参数超限都将导致动力系统控制的单向限制,降低动力功率来实施保护。② 通过减小总距操纵,减少旋翼气动扭矩,对于飞行中恢复动力涡轮转速的作用显著,总距对于动力系统安全控制的意义重大。
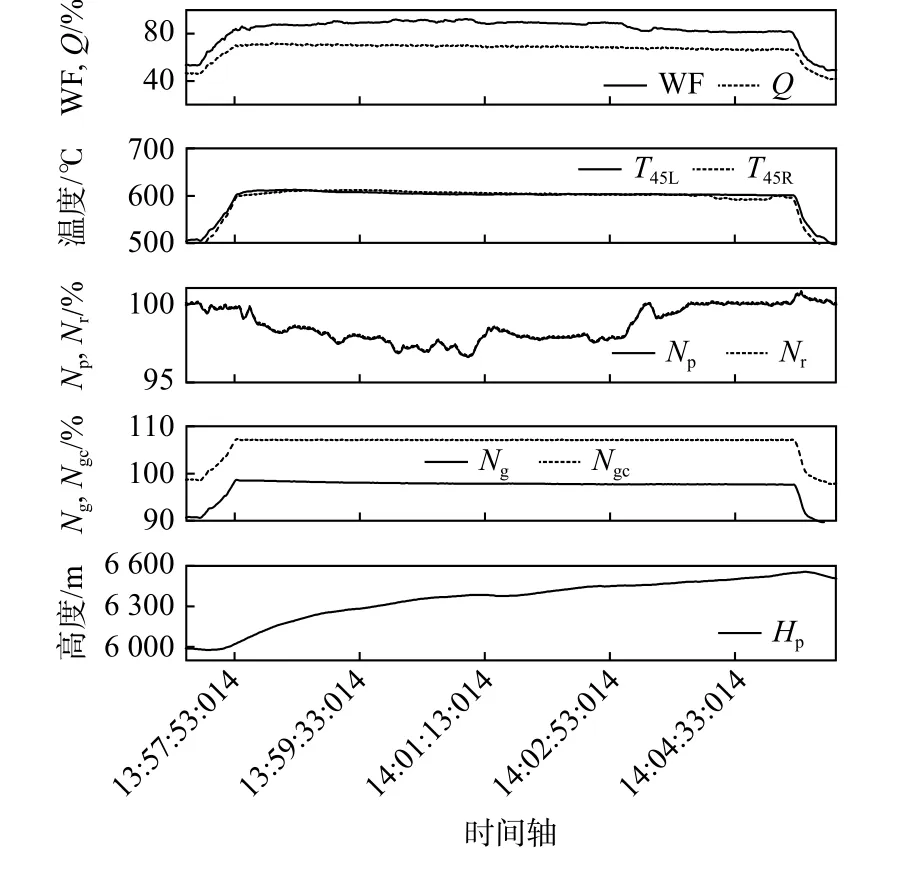
图2 超限工况发参数据曲线Fig. 2 Parameter data curve of exceeded working condition
2 涡轴发动机动力控制与总距影响
2.1 涡轴发动机结构与稳态控制原理
涡轴发动机与一般航空发动机的最大不同,在于其动力是依靠输出轴带动旋翼,以旋转的形式体现,轴功率是最主要的输出参数,主要应用在旋翼飞行器领域,而一般的航空发动机以推力为主要的输出形式,作用于飞机的纵轴域,推动飞机并保障其飞行速度。涡轴发动机主要包括进气道、压气机、燃烧室、燃气及动力涡轮等部件。各部件的建模及发动机控制结构,国内外的学者已有详细的研究及成果[12-13],此处基于文献[12-13]中的控制结构直接予以分析,为总距控制律设计奠定基础。发动机控制结构框图如图3 所示。

图3 发动机控制结构Fig. 3 Engine control structure
各部件数学模型如下。
燃油流量-燃气涡轮转速数学模型[14]:
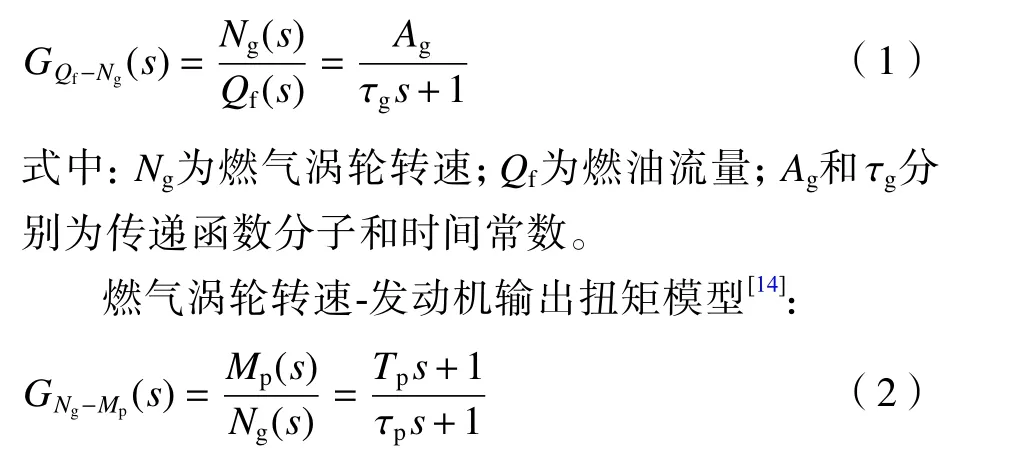
式中:M为 扭矩;Np为动力涡轮转速,决定旋翼转速,直接影响直升机飞行过程中的旋翼转速稳态控制,该数值实时显示在座舱中,超限说明旋翼转速超载,下降说明发动机工作状态受限下降,对飞行员的心理和操纵状态影响显著,数值波动不应过大;Ap和 τp分别为传递函数分子和分母时间常数。
在稳态工作的过程中,控制系统内环采用燃气涡轮转速控制,外环采用动力涡轮转速控制,内环与外环分别设计控制器,最终被控对象为外环输出的动力涡轮转速。当动力涡轮转速受扰改变,反馈至前端与目标转速形成偏差并输入外环控制器,输出燃气涡轮转速指令,指令与实际燃气涡轮转速的偏差输入内环控制器,调节燃油流量,在发参不超限时使其稳定在100%动力涡轮转速的额定状态,实现转速的稳态自动控制[15]。
2.2 总距对动力系统稳态控制的影响
在飞行中,总距的变化直接改变旋翼提供的升力和旋翼所受气动阻力,即改变旋翼负载。根据上述总距-旋翼扭矩负载模型,负载与总距的输入-输出关系为一阶惯性环节的形式,在总距改变时,负载及动力涡轮转速的响应速度很快,通过闭环,快速对动力涡轮转速进行纠偏控制。
在直升机飞行中,提总距杆,产生额外扭矩负载,在发动机输出扭矩不变的情况下,动力涡轮转速下降,产生转速偏差,经外环控制器改变燃气涡轮转速指令,进而通过内环控制器改变燃油流量和输出扭矩,增加动力涡轮转速,消除偏差,达到总距改变、油门随动的控制效果。放总距杆降低总距,原理相似。发动机关键参数未超限时,控制系统符合上述控制原理。
如果发生参数超限,则动力系统控制会进入单向限制,降低燃油流量和涡轮轴输出功率实施保护,进而降低动力功率。但该方法的不足有:①减少燃油量和轴功率,在负载不变的情况下,燃气/动力涡轮转速下降,因转速信号重要性,会造成飞行员心理负担,对操纵造成不良影响;②减少燃油量和轴功率并不限制总距的变化,提距指令在超限工况下的意外输入,会造成燃气/动力涡轮转速持续衰减;③减少功率仅能在超限过程中实现保护,对发参超限的改出没有帮助,不脱离超限状态依然对动力系统和飞行安全很不利;④发参超限状态异常,功率很大,若总距降低速率过快,可导致功率转速超限或旋翼系统超载,威胁飞行安全,需考虑总距安全性。
在直升机操纵过程中,飞行员直接控制总距,提距过程中动力关键参数随发动机功率增加而增加,一旦出现参数临界,则需要边界保护,维持发动机的正常工作状态。根据本文分析,需要从总距控制角度入手,优化设计总距控制律,在发参超限的特殊状态,既要具备边界保护功能,抑制总距增加,并限制发参超限时的总距降低速率;又要在满足条件时,自动协助飞行员改出超限状态。
3 边界保护总距控制律设计
3.1 超限保护总距控制律
超限保护控制的核心方法,是在系统判定发参超限时,抑制总距提距信号,避免动力涡轮转速进一步降低。根据第2 节关键发参及试飞数据,设计发参超限逻辑结构如图4 所示。超限标识Limit_Sw为超限逻辑的最终输出,利用关键发参信号的逻辑判定结果,使用“或”逻辑,关键信号一旦存在异常都将触发超限逻辑。
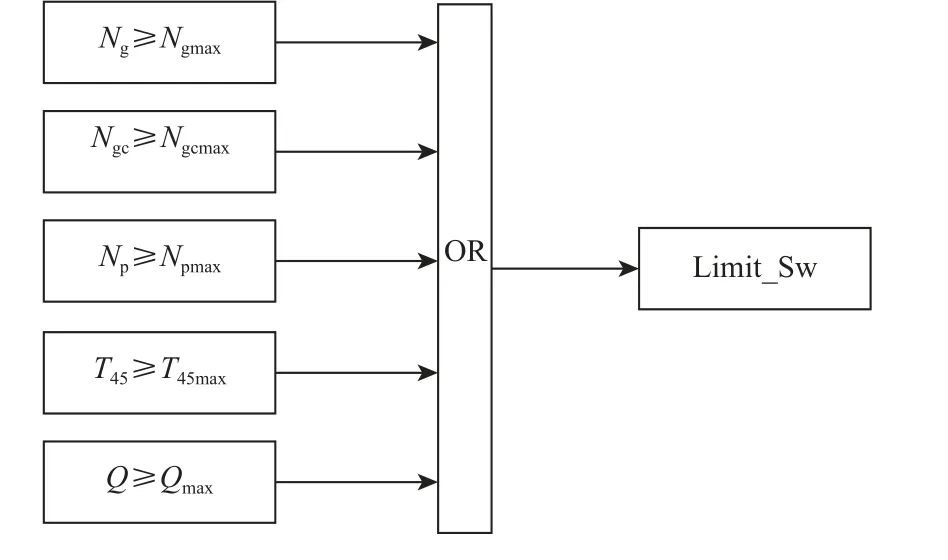
图4 发参超限逻辑结构Fig. 4 Logic structure of over-limit source parameter
当超限标识Limit_Sw=1 时,发动机控制系统接收超限信号,接通超限保护功能,包括提距抑制及放距速率限制。控制功能框如图5 所示。超限时根据总距信号增量 Δβ的极性,识别提距信号,通过指令转换,将指令增量平滑过渡置0,抑制提距;同时,识别放距信号,通过设计放距限速控制律,保证在大功率状态下限速减距,避免动力涡轮转速二次超限,保障飞行安全。 βbaohu为最终指令增量值,作为超限保护控制律的输出,兼具超限保护和减载保护,提高了控制律的有效性和飞机飞行安全性。
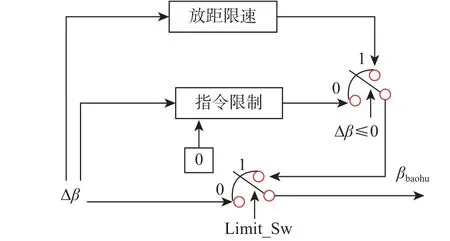
图5 超限保护控制律结构Fig. 5 Structure of overrun protection control law
3.2 自动改出总距控制律
实现超限保护控制,可避免总距增加引发转速持续降低。基于第1 节真实试飞数据分析,仅维持总距不增加,不能降低旋翼负载,同样不利于飞行员及动力系统。因此在保护控制功能的基础上,设计自动改出控制律,自动改出控制律设计如图6 所示。
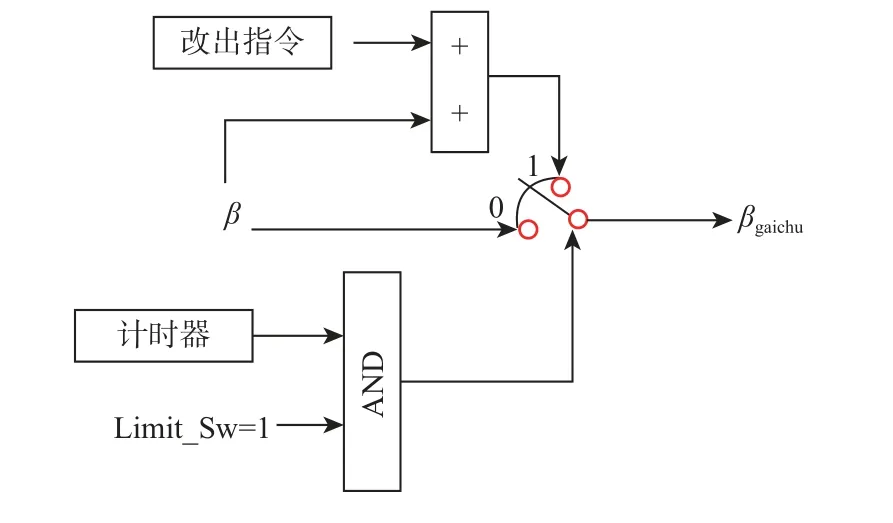
图6 自动改出控制律结构Fig. 6 Structure diagram of automatic change out control law
自动改出控制律的关键是超限计时信号的识别,决定了改出指令的有效性、安全性。当系统检测到Limit_Sw=1 时,计时器开始累积时间,当达到一定时间仍未改出超限状态,系统自动加入改出指令。根据控制功能的快速响应需求及飞行员的建议,设计改出指令为:总距量以0.5(°)/s 的速率降低,平稳过渡直到Limit_Sw=0,超限状态改出,恢复动力系统正常控制。
4 仿真结果及分析
根据3.1 节和3.2 节控制律设计结果,选择状态点气压高度5 km,表速(VI)120 km/h 进行仿真分析。仿真中的总距变化按阶跃信号,以最剧烈变化的方式输入,仿真曲线如图7 所示。
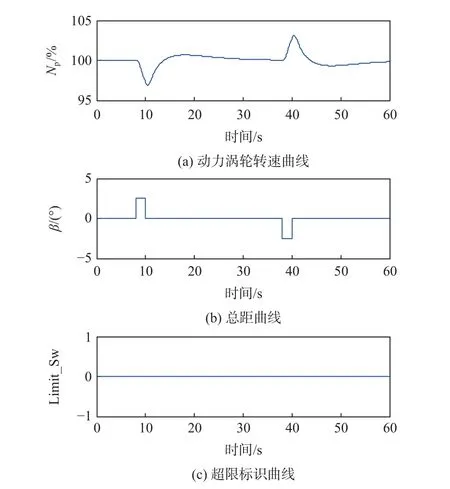
图7 正常状态总距变化转速仿真曲线Fig. 7 Simulation curve of total distance change speed under normal circumstances
由图7 可知,总距上提或下放时,作为负载输入,引起动力涡轮转速Np的降低或增加。在全程未发生发参超限时,动力涡轮转速及燃气涡轮转速双闭环控制可快速将动力涡轮转速调回额定值,保证发动机正常运转。
选择状态点气压高度6 000 m,表速(VI)150 km/h状态点进行仿真分析。以燃气涡轮换算转速超限为例,根据第3 节控制逻辑设计,在仿真时间5 s 时Limit_Sw=1,发参超限,仿真曲线如图8 所示。
由图8 可知,Limit_Sw=1 时,总距保护自动进行提距信号的置0 抑制(见20 s 时图8(b)中的实线),根据动力涡轮转速的响应,有超限保护可抑制转速进一步下降(见20 s 时图8(a)中的实/虚线对比),在放距或Limit_Sw=0 时,恢复正常指令输入(图8(a)曲线后部实/虚线重合部分),提高飞行安全性。
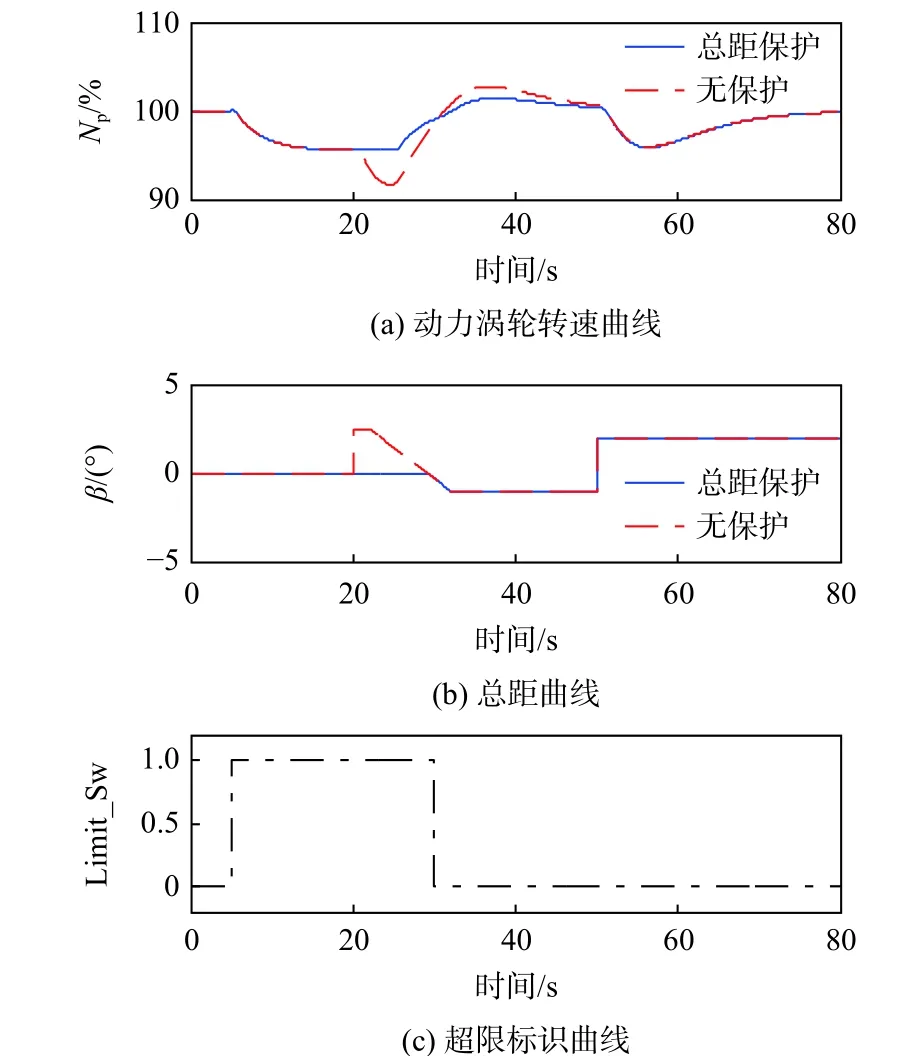
图8 发参超限保护仿真曲线Fig. 8 Simulation curve of over-limit protection for engine parameter
采用相同的状态点,仿真分析自动改出的发参响应,如图9 所示。

图9 发参超限自动改出仿真曲线Fig. 9 Simulation curve of automatic correction out of over-limit engine parameter
在仿真时间5 s 时Limit_Sw=1,累积时间达5 s时,Limit_Sw 不为0,总距在超限5 s 后自动以0.5(°)/s的速率降低,在15 s 时改出超限状态,动力涡轮转速信号回复到额定100%控制,实现了自动改出功能,控制律的设计结果符合预期。
根据总距和动力涡轮转速仿真曲线可知,超限保护和自动改出通过屏蔽信号和稳速降距等方法控制总距,控制方法安全有效,最终将动力系统从边界状态回复到正常工作状态。
5 结 论
本文根据直升机动力系统稳态控制原理及发参超限带来的不良影响,基于控制律设计原理,设计了一种包含总距保护和自动改出控制律的动力系统边界保护控制方法,总结如下:
1) 设计总距保护控制律,实现了发参超限状态下对提距信号的抑制,避免动力涡轮转速继续下降,减少了总距增加的风险和飞行员心理负担。
2) 飞行员在超限状态下减距改出,控制律中的减距速率限制设计,可防止转速急剧加快而超限,利于动力系统的控制安全。
3) 在保证控制安全的基础上,当一定时间内未脱离超限状态时,自动改出控制律可协助飞行员以安全的减距速率改出,平稳解除危险状态,恢复动力系统的正常控制。
该方法从控制律设计的角度,设计了兼顾功率限制、总距负载限制和改出功能的动力系统边界保护控制方法,显著优化动力系统控制功能,并通过仿真系统验证了设计的正确性。
猜你喜欢
煤气与热力(2022年4期)2022-05-23
煤气与热力(2022年4期)2022-05-23
大众投资指南(2021年23期)2021-12-06
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
公民与法治(2020年6期)2020-05-30
汽车维修与保养(2019年7期)2020-01-06
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
汽车维护与修理(2015年6期)2015-02-28