
铁路推送调车作业辅助控制技术优化研究
2023-02-07 10:37刘洪亮刘海亮
铁道货运 2023年1期
刘洪亮,孟 涛,刘海亮
(1.中国铁路济南局集团有限公司 运输部,山东 济南 250001; 2.中国铁路济南局集团有限公司 科技和信息化部,山东 济南 250001; 3.中国铁路济南局集团有限公司 兖州车务段,山东 济宁 272100)
0 引言
铁路推送调车作业是平面调车作业中最常见、最基本的一种调车作业方式,即调车机车在调车车列运行方向的后端,利用机车动力推动车辆运行。在推送调车作业过程中,由于调车机车司机无法确认前方进路、信号等,因此需要调车人员在车列运行前端担任引导员,但由于曲线过大、照明条件较差、大雾、雨雪等恶劣条件造成视线不良、抓乘困难等问题,导致前方引导人员无法准确掌握车辆推送过程中的十车、五车、三车距离,极易发生调车冲突脱轨事故或人身伤害。近年来,随着无线调车机车信号和监控系统(STP)的普及应用,集中联锁区调车作业已基本实现了防止挤道岔、撞土挡、闯蓝灯等事故的发生,使得集中联锁区调车作业安全得到了有效卡控。由于在专用线、岔线等非集中联锁区调车作业无法使用STP系统进行调车作业,因此,为准确、实时地掌握调车车列前端运行情况以及运行车列与停留车(车挡)之间的准确距离,需要设计研发一套推送调车作业辅助控制系统。
在调车作业安全防护、安全监控和辅助控制方面,许多学者进行了相关研究。杨小勇[1]结合北斗定位导航系统(BDS),引入差分定位技术,首次将实时差分定位技术(RTK)应用在调车安全管理当中,实时掌握调车作业全过程;罗万军[2]采用GPS定位、视频信息采集、集成测距技术设计研发智能领车系统;刘杰等[3]提出一种基于GPS的调车安全防护预警系统,利用卫星定位算法和列车控制技术的融合,实现调车车列安全防护。在此,在分析定位精度、架构设计、安全防护和网络通信技术等现状基础上,通过优化组合定位算法和完善信息融合架构,构建基于数字轨道地图辅助的BDS RTK差分定位、惯性导航组合定位算法和雷达测距相融合的双反馈回路,嵌入速度控制模块,设计研发推送调车作业辅助控制系统。
1 铁路调车作业研究现状
铁路调车作业安全防护技术由来已久,但一直无法实现应用普及,主要原因在于定位精度、组合定位算法和融合架构、通信传输技术等方面仍缺乏系统性研究,主要表现在以下方面。
1.1 传统定位模式下的定位精度未达到现实作业需求
2020年7月31日,北斗三号卫星导航系统开通使用,卫星覆盖范围和定位精度均有了极大提升。北斗差分定位技术是在卫星定位的基础上,在地面安装一个或多个基准站接收机,由基准站计算出差分校正量,最终解算出用户的实时定位[4]。依赖RTK差分定位技术可以实现对调车车列和被连挂车辆、车挡以及其他特征点之间的定位,但是由于专用线站场环境复杂、作业种类繁多、电磁干扰等原因,会导致在部分区域信号发生漂移,无法保证定位的完整性与连续性,所以必须在精准定位手段上采用冗余设计,因此引入惯性导航、数字轨道地图、雷达测距等辅助定位方式,保障各种复杂变化条件下的定位和测距精度,由此产生的误差累计、匹配效率和硬件成本全部纳入研究范围。
1.2 数字轨道地图技术没有得到充分利用
铁路不同于其他交通方式,无论是列车开行还是调车作业都是限制在固定轨道上,因此可以绘测出铁路站场数字轨道地图,然后把这一基础性的约束条件作为一元传感器信息纳入到组合定位中。当前数字轨道地图辅助列车定位的研究主要集中在基于BDS/GPS的数字轨道地图的生成和优化、数字轨道地图辅助BDS/GPS的列车轨道占用识别[5]等方面。随着列车定位模块进一步向BDS接收机内部耦合,研究数字轨道地图辅助的BDS RTK、惯性导航组合定位算法将会使不同来源的信息数据形成更为紧密的融合关联,从而形成一个有机整体。
1.3 对组合定位算法和融合架构有待深入研究
组合定位的精度,不仅与采集到的原始数据有关,还与多传感融合算法和融合架构有关。采用组合定位方式可以实现多传感器对同一信息进行收集,这极大地提高了信息的可信度与丰富度。但是,不适当的融合算法往往会导致数据处理量的增加,降低计算效率,更有甚者会导致输出结果的二义性,最终导致决策失误。因此,如何优化组合定位算法和完善信息融合架构,利用多传感器之间的互补性是提高组合定位的精准度、可靠性的关键。
1.4 未实现人车安全防护的有机统一
在调车作业辅助控制和安全监控研究中,学者们仅仅把掌握机车车辆的动态位置信息和实现机车车辆的安全控制[6]作为研究的主要方向,对人身劳动安全防护研究不够,没有实现作业人员、机车车辆以及其他设备整体上的安全一体化。在安全防护功能方面,不仅要实现对调车作业人员、机车、车辆、地面设备位置及状态信息的综合处理,计算移动对象之间、移动对象与防护关键点(信号机、道岔、车挡等)之间的相对位置,还需要确保定位的实时性,从而在时空上实现整个调车作业过程的人车安全[7]。
1.5 既有车地通信技术无法保障数据传输实时性
当前全路采用的通信传输技术主要有数传电台、GSM-R网络和LTE网络等技术。其中,数传电台传输技术存在施工成本高和容易受环境影响的缺点;GSM-R传输速率低于数传电台,而且当前大部分铁路车站GSM-R网络趋于饱和;公共4G网络容易受到移动基站覆盖、峰值网速限制、网络信息安全等影响,无法推广使用。5G 通信相较于其他传统技术具有传输速率高、频率带宽大、传输时延低的优点,而且可以实现安全防护技术架构的优化升级。
2 铁路推送调车作业辅助控制系统架构优化设计
2.1 总体设计思路
推送调车作业辅助控制系统的核心是实现精准实时定位,为此,通过构建基于数字轨道地图辅助的BDS RTK差分定位、惯性导航组合定位算法和雷达测距相融合的双反馈回路,同时把机车车辆、作业人员以及地面固定设备(信号机、道岔、车挡等)加入站场物联网,实现调车作业过程中移动因素的实时交互、控制,并将系统中的动态信息进行综合显示。
2.2 硬件架构
推送调车作业辅助控制系统主要包括综合处理中心、车载设备、移动设备、轨旁感知设备、BDS RTK差分基站和5G通信网络6个部分,推送调车作业辅助控制系统硬件架构如图1所示。
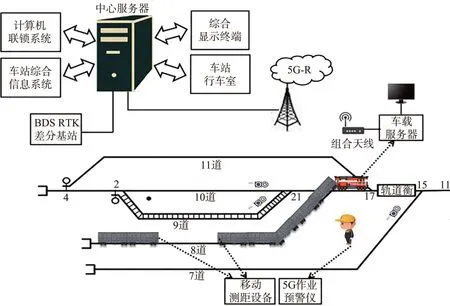
图1 推送调车作业辅助控制系统硬件架构Fig.1 Hardware architecture of auxiliary control system for push-pull shunting operation
(1)综合处理中心。综合处理中心主要包括中心服务器、综合显示终端等。中心服务器是实现调车作业实时追踪、安全防护和辅助控制的中央处理器,担负着组合定位计算、调车许可计算、控车模式曲线运算和下达控车指令等。同时,中心服务器可以从车站管理信息系统实时获取调车作业计划并发送至调车机车载显示终端复视,也可以从车站计算机联锁系统获取联锁状态数据。综合显示终端主要负责接收中心服务器发送的站场物联网各终端实时定位信息、运行路径和各视频采集终端发送的视频、语音信息,确保盯控人员能够直观、深入地掌握作业进程。
(2)车载设备。车载设备主要包括车载服务器、车载显示终端、BDS RTK接收天线、5G天线等。车载服务器与机车控制器接口,获取调车机车运行数据,同时接收、执行中心服务器发送的控车指令。车载服务器通过BDS RTK接收天线和5G天线进行差分定位和无线传输。
(3)移动设备。移动设备主要包括移动测距设备和5G作业预警仪。移动测距设备由惯性导航定位模块、雷达测距模块、BDS RTK接收天线和5G天线组成,由连结员将移动测距设备固定在推进运行车列的前端和停留车辆(车挡)的连挂端。5G作业预警仪由摄像头、BDS RTK接收天线和5G天线组成,实时采集视频、语音和定位数据。
(4)轨旁感知设备。轨旁感知设备由智能感知传感器组成,可通过图像识别、点云数据等智能感知技术实现车列运行状态监控和轨旁设备状态采集。
(5)BDS RTK差分基站。BDS RTK差分基站承担差分校正量的计算,通过5G网络发送至各定位终端,然后解算卫星定位和差分定位数据,最终得到差分定位坐标。
(6)5G通信网络。5G网络作为第5代通信技术,不但可以大幅度提升传输速率,而且增强了数据传输稳定性,主要表现在:一是优化并提升系统控车逻辑,系统控车效率明显提升;二是优化并提升系统安全逻辑,5G网络通信数据码距加长,提升了数据传输的安全性,确保了车地通信的实时性[8]。
2.3 软件架构
优化后的推送调车作业辅助控制系统基于5G通信技术设计,采用分层分布式架构,软件架构分为综合显示层、信息采集层、决策控制模块和命令执行层,推送调车作业辅助控制系统软件架构如图2所示。
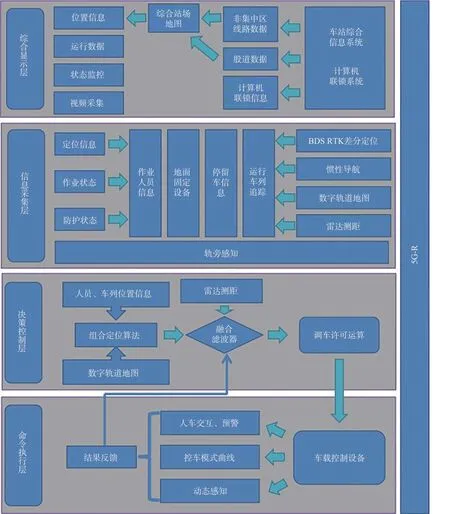
图2 推送调车作业辅助控制系统软件架构Fig.2 Software architecture of auxiliary control system for push-pull shunting operation
(1)综合显示层。在车站行车室设置综合显示终端,以“综合站场地图”[9](在系统中预先导入车站平面示意图,建立车站线路参数,形成具备映射功能的“综合站场地图”)为显示界面,根据采集到的联锁状态数据和站场物联网各终端实时位置、运动轨迹和作业状态,在对应位置以不同形状的图标显示各终端的实时位置,并标注作业指令发送、预发送和作业反馈情况,实现位置、状态和作业控制的直观表达。
(2)信息采集层。从BDS RTK差分基站采集定位差分数据,从数字轨道地图、惯性导航模块获得修正位移矢量,从站场物联网其他各终端采集运行车列、停留车状态和地面固定设备占用状态,从作业人员便携设备采集作业人员的位置信息、作业和防护状态,从计算机联锁系统、车站管理信息系统采集联锁状态数据和调车作业计划,然后转换为统一格式的数据。
(3)决策控制层。综合全面分析采集到的所有数据,实现实时精准定位和自动决策控制。在BDS RTK差分定位的基础上,利用组合定位算法修正定位矢量,将运动车列前端的定位坐标经卡尔曼滤波预处理后与调车机车速度传感器采集到的位移数据进行修正;运行车列前端安装的以毫米波雷达、激光雷达和视觉传感器的深度融合雷达探测装置可以实时获取200 m内的点云数据,构建出车列运行前端的实时三维环境,通过点云实时处理算法计算出距离,然后与前述组合定位算法求得的定位矢量经融合滤波器解算后,再根据运动车列的位置和运动状态铺画出控车模式曲线并发出相应指令,从而实现推送调车作业的自动化控制。
(4)命令执行层。车载控制设备接收来自地面控制设备的处理信息和指令,进行辅助控制和结果反馈,主要包括动态运算控车模式曲线,实时交互机车车辆与作业人员的相对位置信息、作业和防护状态,扫描探测运行前方线路上人员或障碍物等。
3 算法优化设计
所设计的算法是基于组合定位和雷达测距双反馈的解算算法。基于数字轨道地图辅助的BDS RTK差分定位、惯性导航组合定位算法,首先通过惯导系统与BDS RTK差分信息进行运算,得到惯导系统的伪距和伪距率,在BDS RTK和惯导系统深组合结构的基础上,增加数字轨道地图的量测信息,把数字轨道地图转化为定位方程的约束条件,再使用卡尔曼滤波算法解算出伪距和伪距率的修正值,这样就构成了数字轨道地图辅助的BDS和惯导系统跟踪回路。雷达测距是基于毫米波雷达、激光雷达和视觉传感器深度融合的探测装置,通过实时获取点云数据,构建出车列运行前端的实时三维环境,通过点云实时处理算法计算出距离的反馈回路。
3.1 系统误差方程
由于数字轨道地图测量数据存在精度误差,因此通过融合滤波器模型进行消减误差,可以针对测量数据的测绘误差进行建模,建立关于地图点测绘精度的状态模型,构成深组合定位的增广状态模型。其中2个端点测绘误差的状态变量MD表达为

式中:δxn, δyn, δzn为三维坐标误差向量。
组合定位滤波器的系统状态方程为BDS、惯性导航和数字轨道地图的误差状态方程,系统状态方程为
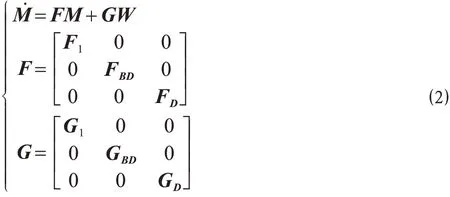
式中:M=[M1MBDMD]T为三维误差状态向量;W=[W1WBDWD]T为系统噪声;F为系统矩阵;G为噪声矩阵。
这些矩阵包括惯性导航对应的M1,W1,F1,G1,BDS RTK对应的MBD,WBD,FBD,GBD,以及数字轨道地图对应的MD,WD,FD,GD。
惯性导航的误差状态主要包括系统和器件误差;BDS RTK的误差状态主要包括时钟和时钟频率误差;数字轨道地图的误差状态主要包括地图两端的三维位置测量误差,其误差状态方程表达如下。

式中:MD=[δx1δy1δz1δx2δy2δz2]T为数字地图中2个端点的三维位置测量误差向量;FD为6×6零矩阵;GDWD为系统噪声。
3.2 系统量测方程
系统观测量取BDS RTK接收机输出的伪距ρi、伪距率和数字轨道地图构成的位置辅助观测量ZD1、速度辅助观测量ZD2,定义量测量为
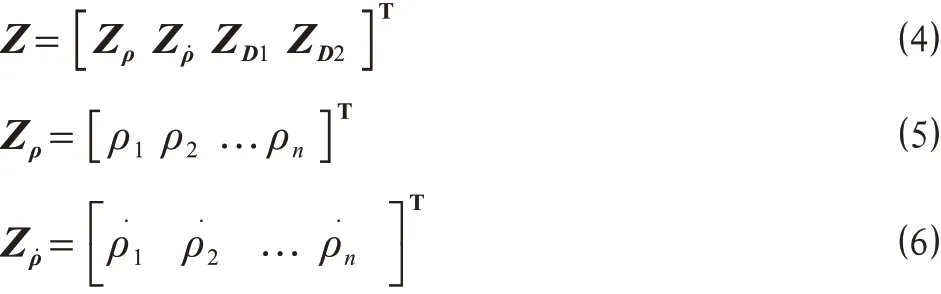
系统量测方程包括伪距测量差量测方程、伪距率测量差量测方程、基于数字轨道电路构成的位置辅助方程和速度辅助方程。在此重点推导基于数字轨道电路构成的位置辅助方程和速度辅助方程。
(1)位置辅助方程。假设从数字轨道地图中选中线段的2个端点坐标M1(x1,y1,z1)和M2(x2,y2,z2),将M1M2构成的一条直线段近似调车车列运行轨道,则车列在该线段任何一点的坐标Mp(xu,yu,zu)满足

i时刻惯性导航给出的位置M1(x1,y1,z1),为使Mp=(x1+δx,y1+δy,z1+δz)刚 好 落 在 地 图 端 点 坐 标构成的直线段上,则需满足直线方程
将公式整理得到位置辅助观测量

式中:VD1为基于数字轨道电路的位置辅助方程噪声向量;HD1为数字轨道电路的位置辅助方程的量测矩阵。
(2)速度辅助方程。设直线段M1M2的方向向量为则 车 列 在 该 线 段 任 意 一点的速度向量真值Vp=(ẋu,ẏu,żu)应与直线段M1M2的方向向量平行,即

i时刻惯性导航给出的速度为使与 地 图 端 点 坐 标构成的直线段的方向向量平行,则
将公式整理得到速度辅助观测量如下。

综合考虑伪距测量差量测方程、伪距率测量差量测方程,可得量测方程为
由于定位系统是个非线性系统,因此需要使用EKF,UKF等方式将求得的状态方程和量测方程建立线性滤波方程,再使用渐消自适应卡尔曼融合滤波算法[10]解算出伪距和伪距率的修正值,进而提高伪距测量值的精度。最后,通过内插外推法组合解算出高精度的伪距测量值,得到高精度的位置差。
4 仿真分析
为了验证算法的有效性,进行了均融合雷达测距的BDS RTK、BDS RTK/惯性导航、BDS RTK/惯性导航/数字轨道地图3种方法的解算。3种方法的均方根误差比较如表1所示。

表1 3种方法的均方根误差比较Tab.1 Comparison of root-mean-square error of three methods
为了进一步比较3种方法的差异性,通过实验仿真,将3种方法的3个参数指标进行对比分析。BDS RTK定位误差如图3所示,BDS RTK/惯性导航定位误差如图4所示,BDS RTK/惯性导航/数字轨道地图定位误差如图5所示。
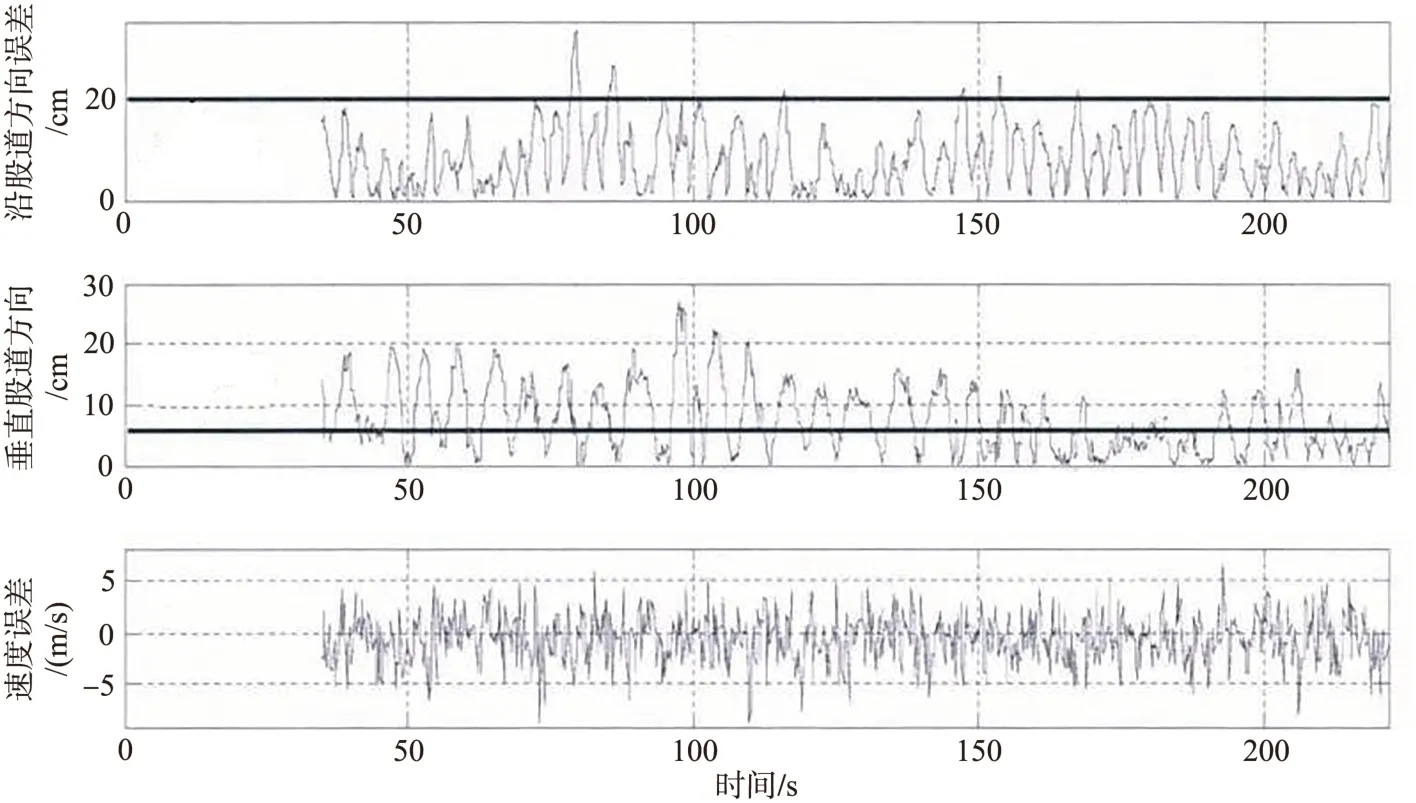
图3 BDS RTK定位误差Fig.3 BDS RTK positioning error

图4 BDS RTK/惯性导航定位误差Fig.4 BDS RTK/inertial navigation positioning error
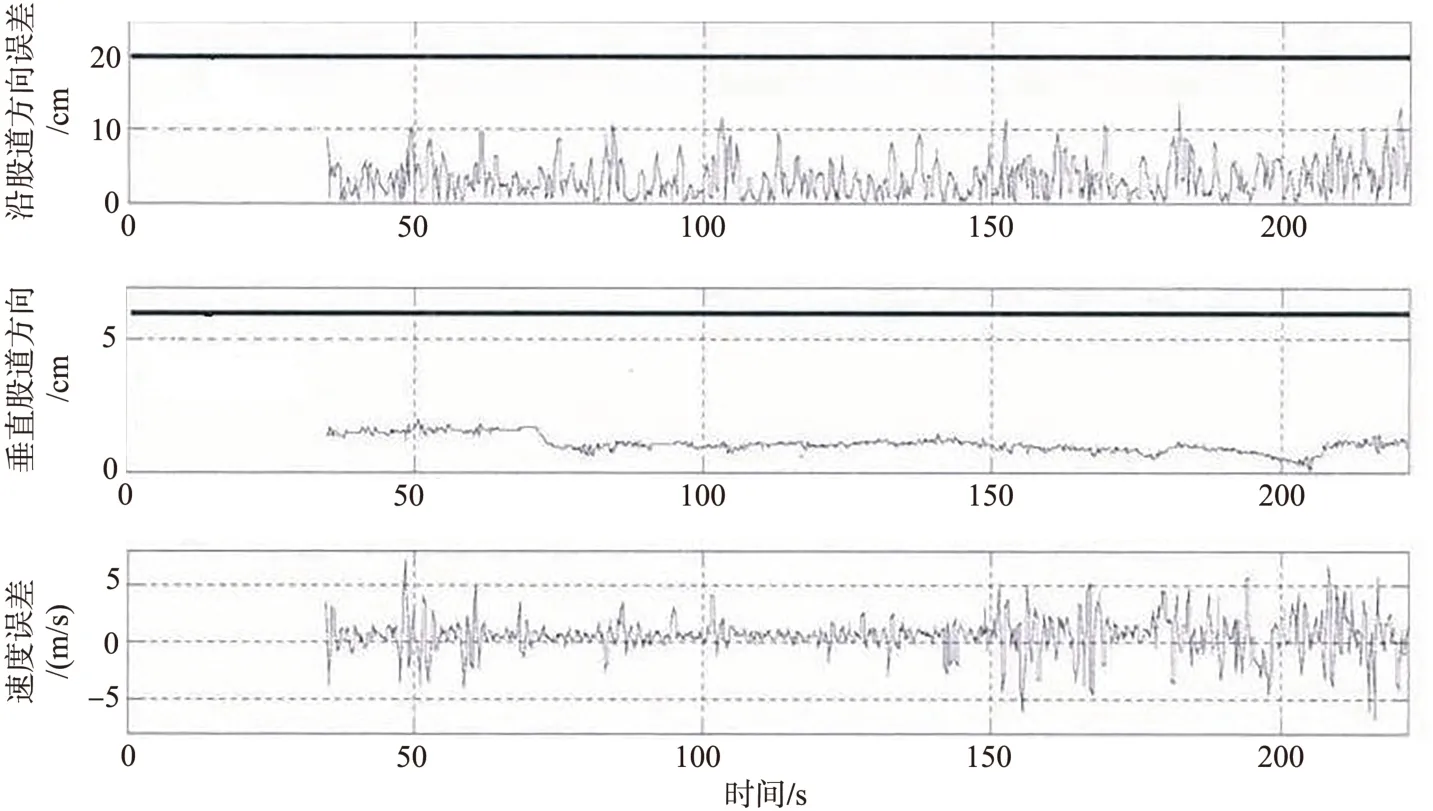
图5 BDS RTK/惯性导航/数字轨道地图定位误差Fig.5 BDS RTK/inertial navigation/digital track map positioning error
从图中可看出,所述算法的精度最高,进一步证明了算法的有效性。
5 结束语
铁路推送调车作业辅助控制系统是在差分定位的基础上,通过优化组合定位算法和完善信息融合架构,设计了一套基于数字轨道地图辅助的BDS RTK差分定位、惯性导航组合定位算法和雷达测距相融合的定位系统,从而实现推送调车作业的高精度定位和实时控制。目前,推送调车作业辅助控制系统已经在中国铁路济南局集团有限公司娄山站和兖州北站投入使用,系统定位精度高、运行稳定可靠,实现了运行车列与停留车(车档等)距离、速度等参数的实时检测,并将融合解算数据经中心服务器调车许可运算后传输给车载控制终端,最终实现调车车列辅助控制,从而进一步提高了专用线、岔线等非集中区调车作业的安全性和自动化水平。下一步将把推送调车作业辅助控制系统与现有STP系统融合,实现铁路车站全部线路的调车自动化控制,不断提高铁路调车作业技术水平。
猜你喜欢
数学杂志(2022年5期)2022-12-02
军民两用技术与产品(2021年7期)2021-10-13
新世纪智能(数学备考)(2021年5期)2021-07-28
湖北农机化(2020年4期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
铁道通信信号(2018年9期)2018-11-10
减速顶与调速技术(2018年4期)2018-08-27
铁道通信信号(2018年1期)2018-06-06
铁道通信信号(2016年2期)2016-06-01
中国惯性技术学报(2015年1期)2015-12-19
